You might also like
- Isometric Drawing PipingDocument11 pagesIsometric Drawing Pipingductaiutc86% (14)
- CFA Guidance Note - Fixings and CorrosionDocument4 pagesCFA Guidance Note - Fixings and CorrosionkanekuenenNo ratings yet
- Sheet Metalwork on the Farm - Containing Information on Materials, Soldering, Tools and Methods of Sheet MetalworkFrom EverandSheet Metalwork on the Farm - Containing Information on Materials, Soldering, Tools and Methods of Sheet MetalworkNo ratings yet
- Fiber Laser Cutting ParametersDocument25 pagesFiber Laser Cutting ParametersKerry Saintz100% (1)
- Triangulation - Applied to Sheet Metal Pattern Cutting - A Comprehensive Treatise for Cutters, Draftsmen, Foremen and Students: Progressing from the Simplest Phases of the Subject to the Most Complex Problems Employed in the Development of Sheet Metal Patterns with Practical Solutions of Numerous Problems of Frequent Occurrence in Sheet Metal ShopsFrom EverandTriangulation - Applied to Sheet Metal Pattern Cutting - A Comprehensive Treatise for Cutters, Draftsmen, Foremen and Students: Progressing from the Simplest Phases of the Subject to the Most Complex Problems Employed in the Development of Sheet Metal Patterns with Practical Solutions of Numerous Problems of Frequent Occurrence in Sheet Metal ShopsRating: 5 out of 5 stars5/5 (1)
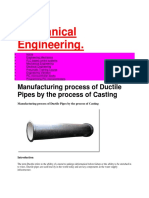
- Mechanical Engineering Ductile Pipe Manufacturing ProcessDocument14 pagesMechanical Engineering Ductile Pipe Manufacturing ProcessEl WijaNo ratings yet
- ASME - Bioprocessing Equipment StandardDocument6 pagesASME - Bioprocessing Equipment StandardChem.EnggNo ratings yet
- In-Situ MetallographyDocument7 pagesIn-Situ Metallographyhatem jafouraNo ratings yet
- Model Papers PDFDocument33 pagesModel Papers PDFSeemab Malik85% (20)
- Wear Analysis of Chromium Carbide Coating On A516 WCB Steel by Plasma Spraying TechniqueDocument12 pagesWear Analysis of Chromium Carbide Coating On A516 WCB Steel by Plasma Spraying TechniqueIJRASETPublicationsNo ratings yet
- WOM Magnum Gate Valve BrochureDocument8 pagesWOM Magnum Gate Valve BrochuresjongejongeNo ratings yet
- Tool-Steel - A Concise Handbook on Tool-Steel in General - Its Treatment in the Operations of Forging, Annealing, Hardening, Tempering and the Appliances ThereforFrom EverandTool-Steel - A Concise Handbook on Tool-Steel in General - Its Treatment in the Operations of Forging, Annealing, Hardening, Tempering and the Appliances ThereforNo ratings yet
- 1 - FW STD - Piping Material SpecsDocument3 pages1 - FW STD - Piping Material Specsalikami100% (1)
- Cameron Tree Selection Guide - Corrosion at The Wellhead PDFDocument37 pagesCameron Tree Selection Guide - Corrosion at The Wellhead PDFOsama100% (1)
- High Speed CastingDocument7 pagesHigh Speed Castingferdlh9No ratings yet
- Tappi Tip 0402-19Document21 pagesTappi Tip 0402-19GTpianomanNo ratings yet
- Stainless Steel Welding ProcedureDocument18 pagesStainless Steel Welding Procedurealfian leoanakNo ratings yet
- Atlas Engineering Metals HandbookDocument136 pagesAtlas Engineering Metals HandbookMatt KurtzeNo ratings yet
- Corrosion of Stainless SteelDocument10 pagesCorrosion of Stainless SteelRizky Ilham DescarianNo ratings yet
- Selection of MaterialDocument16 pagesSelection of MaterialRiyaNo ratings yet
- Surface PreparationDocument13 pagesSurface PreparationDacher Daniel100% (1)
- Wire BreaksDocument23 pagesWire BreaksAnderson LeitzkeNo ratings yet
- Corrosion Prevention in Railway Coaches PDFDocument7 pagesCorrosion Prevention in Railway Coaches PDFnaveenjoy84No ratings yet
- Finite Element Analysis of Butterfly ValveDocument13 pagesFinite Element Analysis of Butterfly ValveIJRASETPublicationsNo ratings yet
- Corrosion Protection of BridgesDocument7 pagesCorrosion Protection of BridgesMihajloDjurdjevicNo ratings yet
- Eriii4 Structure MateriAUVSals2Document11 pagesEriii4 Structure MateriAUVSals2lexluther234234No ratings yet
- 5 CorrosionDocument10 pages5 CorrosionDiego AranibarNo ratings yet
- Surface Preparation Guide PDFDocument13 pagesSurface Preparation Guide PDFait.koufiNo ratings yet
- Engineering MaterialsDocument46 pagesEngineering MaterialsAdil FarooqNo ratings yet
- Application of Low Cost Inhibitors To Reduce Rate of Corrosion in Rail Passenger CoachesDocument9 pagesApplication of Low Cost Inhibitors To Reduce Rate of Corrosion in Rail Passenger CoachessaisenthNo ratings yet
- Stainless Steel Reinforcement BenefitsDocument21 pagesStainless Steel Reinforcement BenefitsAnket PandeyNo ratings yet
- Kavya.E, Swedha.TDocument7 pagesKavya.E, Swedha.TamokeNo ratings yet
- Corten Steel 1Document3 pagesCorten Steel 1Gurjeet Singh LallNo ratings yet
- Surface PreparationDocument13 pagesSurface PreparationelangorengaNo ratings yet
- Improving Quality Welding Stainless Steel PipeDocument2 pagesImproving Quality Welding Stainless Steel PipeGordan SanticNo ratings yet
- Materials for Corrosive Environments ReportDocument6 pagesMaterials for Corrosive Environments ReportAhmad DanialNo ratings yet
- 08 MetallizationDocument25 pages08 Metallizationrojas mdangaNo ratings yet
- HeliCoil Technical Information Corrosion Screw ThreadsDocument6 pagesHeliCoil Technical Information Corrosion Screw ThreadsAce Industrial SuppliesNo ratings yet
- IJETR021817Document3 pagesIJETR021817erpublicationNo ratings yet
- Reject DowDocument2 pagesReject Dowcoolguy12345No ratings yet
- About Die CastingDocument3 pagesAbout Die CastingJoelNo ratings yet
- Galvanic Series: Why Metals Corrode?Document7 pagesGalvanic Series: Why Metals Corrode?Rey Francis FamulaganNo ratings yet
- Ic381 TM5043 SMTP PPT01Document25 pagesIc381 TM5043 SMTP PPT01steveNo ratings yet
- Corrosion Issues and Prevention in Oil IndustryDocument33 pagesCorrosion Issues and Prevention in Oil IndustryPreet Singh100% (1)
- Failure Analysis of A Helical Gear in A Gearbox Used in A Steel Rolling MillDocument7 pagesFailure Analysis of A Helical Gear in A Gearbox Used in A Steel Rolling MillymsyaseenNo ratings yet
- Steel Structure - CorrosionDocument10 pagesSteel Structure - CorrosionVibhor YadavNo ratings yet
- Mechanical Properties of Reinforcing Steel Bar (Deformed/Ribbed) With Different Degree of CorrosionDocument32 pagesMechanical Properties of Reinforcing Steel Bar (Deformed/Ribbed) With Different Degree of CorrosioncholoNo ratings yet
- SSRN Id3633773Document9 pagesSSRN Id3633773FilorNo ratings yet
- Durability of SFRC PDFDocument10 pagesDurability of SFRC PDFBehzadDastjerdyNo ratings yet
- Paper 1Document11 pagesPaper 1Julius RojoNo ratings yet
- Chrome MigrationDocument3 pagesChrome Migrationdk24991No ratings yet
- Design and Analysis of Connecting Rod Using Different MaterialsDocument15 pagesDesign and Analysis of Connecting Rod Using Different MaterialsIJRASETPublicationsNo ratings yet
- RCF KapurthallaDocument18 pagesRCF KapurthallaSudhir Kumar50% (2)
- Pipe Inspection RobotDocument13 pagesPipe Inspection RobotJeevan Landge PatilNo ratings yet
- Scrap Steel Production and Recycling ProjectDocument15 pagesScrap Steel Production and Recycling ProjectHadush TeklayNo ratings yet
- Adigrat University: College of Engineering and TechnologyDocument15 pagesAdigrat University: College of Engineering and TechnologyHadush TeklayNo ratings yet
- Study of Tribological Behavior For Chromium BasedDocument7 pagesStudy of Tribological Behavior For Chromium Based332-65 Nitin ShindeNo ratings yet
- Page 1 of 59Document59 pagesPage 1 of 59Wilfharry billyNo ratings yet
- E3sconf Icmpc2023 01214Document13 pagesE3sconf Icmpc2023 01214BALOGUNNo ratings yet
- Corrosion and Its Prevention in Petroleum IndustriesDocument32 pagesCorrosion and Its Prevention in Petroleum Industriesz_sheerazNo ratings yet
- Design and Analysis of Connecting Rod Using Different MaterilasDocument9 pagesDesign and Analysis of Connecting Rod Using Different MaterilasVIVEK UPADHYAYNo ratings yet
- Analysis of An Uncommon Coating Defect On Industrial Galvannealed High Strength Interstitial Free SteelDocument10 pagesAnalysis of An Uncommon Coating Defect On Industrial Galvannealed High Strength Interstitial Free SteelHasanBadjrieNo ratings yet
- Uncoated Weathering Steel in Structures - Structures - Bridges & Structures - Federal Highway AdministrationDocument6 pagesUncoated Weathering Steel in Structures - Structures - Bridges & Structures - Federal Highway Administrationsong112358No ratings yet
- Group presentation on corrosion in automobile industryDocument17 pagesGroup presentation on corrosion in automobile industryOsan ThorpeNo ratings yet
- Assets - Files - Water Chilling Plant QuestionnaireDocument1 pageAssets - Files - Water Chilling Plant QuestionnaireGuru SamyNo ratings yet
- SQCMDocument2 pagesSQCMGuru SamyNo ratings yet
- MT2 QBDocument6 pagesMT2 QBGuru SamyNo ratings yet
- Kone Ecospace ElevatorDocument8 pagesKone Ecospace ElevatorvicNo ratings yet
- Catálogo de Bandejas y AccesoriosDocument180 pagesCatálogo de Bandejas y AccesoriospatrickNo ratings yet
- WRC 1992Document8 pagesWRC 1992alfian leoanakNo ratings yet
- Stainless Steel - Grade 304Document4 pagesStainless Steel - Grade 304RektaNo ratings yet
- FST Consumables Guide Section WiresDocument12 pagesFST Consumables Guide Section WiresDanel SutrisnoNo ratings yet
- SS 420 PropertiesDocument2 pagesSS 420 PropertiesmrbookaniNo ratings yet
- Stainless Steel NotesDocument9 pagesStainless Steel Notesthouche007No ratings yet
- Jaf P SeriesDocument2 pagesJaf P SeriesriskiriskNo ratings yet
- Asco Series 290 Angle Body CatalogDocument10 pagesAsco Series 290 Angle Body CatalogcillongNo ratings yet
- SANDIA LABORATORIES - Tech. Ref. Hydrogen Comp. of Materials - 321 & 347Document14 pagesSANDIA LABORATORIES - Tech. Ref. Hydrogen Comp. of Materials - 321 & 347lcmpX86No ratings yet
- Rumex New Instruments ENGDocument34 pagesRumex New Instruments ENGAdonias de OliveiraNo ratings yet
- Valve Manifold For Differential Pressure Gauges Model 910.25Document4 pagesValve Manifold For Differential Pressure Gauges Model 910.25chauNo ratings yet
- MoRTH 1000 Materials For StructureDocument18 pagesMoRTH 1000 Materials For StructureApurv PatelNo ratings yet
- Ultra-Narrow Gap Fiber Laser Conduction Welding Technology For 304 Stainless Steel Thick Plates and The Mechanical Properties of Welding JointsDocument12 pagesUltra-Narrow Gap Fiber Laser Conduction Welding Technology For 304 Stainless Steel Thick Plates and The Mechanical Properties of Welding JointsMaxNo ratings yet
- Ferrous Metals ModuleDocument1,090 pagesFerrous Metals ModulesreeramNo ratings yet
- DP DPKDocument70 pagesDP DPKKrrishNo ratings yet
- Tubing Data-Engineered Combinations MS-06-117Document7 pagesTubing Data-Engineered Combinations MS-06-117kirlaniano@gmail.comNo ratings yet
- Stainless Steel Bs en EquivalentsDocument3 pagesStainless Steel Bs en EquivalentsSantiago VayasNo ratings yet
- Catalogo TsurumiDocument40 pagesCatalogo TsurumiAPOLINAR GARCÍA OTINIANONo ratings yet
- Tech Guide To Filling MachinesDocument12 pagesTech Guide To Filling MachinesLatifani Ayu ChaerunnisaNo ratings yet
- Piping Material Specification-GeneralDocument15 pagesPiping Material Specification-GeneralTejas PatelNo ratings yet
- Grade 430 Stainless Steel Technical DataDocument3 pagesGrade 430 Stainless Steel Technical DatadetriwiatnoNo ratings yet