You might also like
- Dokumen - Pub - Bobs Refunding Ebook v3 PDFDocument65 pagesDokumen - Pub - Bobs Refunding Ebook v3 PDFJohn the First100% (3)
- Ib History Command Term PostersDocument6 pagesIb History Command Term Postersapi-263601302100% (4)
- Engineering Electromagnetic Fields and Waves 2nd Edition PDFDocument638 pagesEngineering Electromagnetic Fields and Waves 2nd Edition PDFxieapi88% (42)
- MATH2101 Cheat SheetDocument3 pagesMATH2101 Cheat SheetWong NgNo ratings yet
- RSA - Brand - Guidelines - 2019 2Document79 pagesRSA - Brand - Guidelines - 2019 2Gigi's DelightNo ratings yet
- PMP Question BankDocument3 pagesPMP Question BankOmerZiaNo ratings yet
- Working With Difficult People Online WorksheetDocument4 pagesWorking With Difficult People Online WorksheetHugh Fox IIINo ratings yet
- Exercises Session1 PDFDocument4 pagesExercises Session1 PDFAnonymous a01mXIKLxtNo ratings yet
- Linear CombinationDocument26 pagesLinear Combinationyassin.sobh.2003.ysNo ratings yet
- Differential Calculus Made Easy by Mark HowardDocument178 pagesDifferential Calculus Made Easy by Mark HowardLeonardo DanielliNo ratings yet
- SdarticleDocument9 pagesSdarticleSachin KumarNo ratings yet
- Applied1-Unit1 - vectors-2011ECDocument33 pagesApplied1-Unit1 - vectors-2011ECTadesseNo ratings yet
- Maths 2 For Eng - Lesson 1Document9 pagesMaths 2 For Eng - Lesson 1Abdulkader TukaleNo ratings yet
- Chapter 26 - Remainder - A4Document9 pagesChapter 26 - Remainder - A4GabrielPaintingsNo ratings yet
- Optimization Techniques: Dr. Muhammad Naeem Dr. Ashfaq AhmedDocument64 pagesOptimization Techniques: Dr. Muhammad Naeem Dr. Ashfaq AhmedMuhammad Ali Khan AwanNo ratings yet
- Metric Convexity of Symmetric Cones: Lawson, J. and Lim, Y. Osaka J. MathDocument22 pagesMetric Convexity of Symmetric Cones: Lawson, J. and Lim, Y. Osaka J. MathSangat BaikNo ratings yet
- Study Guide - Real Analysis - Chapter 2 (Measurable Functions)Document12 pagesStudy Guide - Real Analysis - Chapter 2 (Measurable Functions)Patricia MislangNo ratings yet
- Am1 Ex4Document3 pagesAm1 Ex4CH YNo ratings yet
- Discrete Mathematics Notes - 2012Document56 pagesDiscrete Mathematics Notes - 2012yee chong 94No ratings yet
- Cover XavierDocument19 pagesCover XavierFrancisco Javier Puerta CollNo ratings yet
- Correlation of Neutrosophic Data: I.M. Hanafy, A.A.Salama and K. MahfouzDocument5 pagesCorrelation of Neutrosophic Data: I.M. Hanafy, A.A.Salama and K. Mahfouzwww.irjes.comNo ratings yet
- 10th Samacheer Kalvi Maths All Units Points To RememberDocument10 pages10th Samacheer Kalvi Maths All Units Points To RememberArvind RanganathanNo ratings yet
- Chapter 1:-: Basics of An Algorithm and MathematicsDocument34 pagesChapter 1:-: Basics of An Algorithm and Mathematicsn_indianNo ratings yet
- Sets and Cardinality Notes For 620-111: C. F. Miller Semester 1, 2000Document21 pagesSets and Cardinality Notes For 620-111: C. F. Miller Semester 1, 2000DarKevin PerillaNo ratings yet
- MAE 200A - Homework Set #1Document2 pagesMAE 200A - Homework Set #1vsauerNo ratings yet
- Am1 Ex3Document3 pagesAm1 Ex3CH YNo ratings yet
- Numerical Solution Methods: 3.1.1 Matrices and Vectors in FortranDocument9 pagesNumerical Solution Methods: 3.1.1 Matrices and Vectors in FortranLucas SantosNo ratings yet
- Linear Algebra by Prof. R. Vittal RaoDocument5 pagesLinear Algebra by Prof. R. Vittal RaoDevraj MandalNo ratings yet
- Matrices, Determinants & Linear SystemsDocument30 pagesMatrices, Determinants & Linear SystemssilviubogaNo ratings yet
- Midterm SolutionDocument11 pagesMidterm SolutionAndrés López MartínezNo ratings yet
- Wipro Class 2Document18 pagesWipro Class 2yuvarajNo ratings yet
- Topic 5 Linear Combination Linear Dependence Spanning, Orthogonal-WordDocument12 pagesTopic 5 Linear Combination Linear Dependence Spanning, Orthogonal-Wordwendykuria3No ratings yet
- ECE 3040 Lecture 9: Taylor Series Approximation II: © Prof. Mohamad HassounDocument23 pagesECE 3040 Lecture 9: Taylor Series Approximation II: © Prof. Mohamad HassounKen ZhengNo ratings yet
- GEM 802 Chapter 1Document52 pagesGEM 802 Chapter 1Leah Ann ManuelNo ratings yet
- Hayashi CH 1 AnswersDocument4 pagesHayashi CH 1 AnswersLauren spNo ratings yet
- PcaDocument10 pagesPcajhansiprs2001No ratings yet
- Exam 1Document10 pagesExam 1FunWithNumbers88No ratings yet
- Arrays and MatricesDocument43 pagesArrays and MatricesMarian CelesteNo ratings yet
- Chap3 PDFDocument36 pagesChap3 PDFpudnchinaNo ratings yet
- Gauss Elimination MethodDocument15 pagesGauss Elimination MethodAditya AgrawalNo ratings yet
- 5 System of Linear EquationDocument12 pages5 System of Linear EquationAl Asad Nur RiyadNo ratings yet
- Libro Fasshauer Numerico AvanzadoDocument151 pagesLibro Fasshauer Numerico AvanzadoCarlysMendozaamorNo ratings yet
- The Existence of Generalized Inverses of Fuzzy MatricesDocument14 pagesThe Existence of Generalized Inverses of Fuzzy MatricesmciricnisNo ratings yet
- Primal-Dual Interior Point Method ReportDocument8 pagesPrimal-Dual Interior Point Method ReportjayroldparcedeNo ratings yet
- On The Boolean Minimal Realization Problem in The Max-Plus AlgebraDocument10 pagesOn The Boolean Minimal Realization Problem in The Max-Plus AlgebraHarsha KarunathissaNo ratings yet
- Chapter 1(s)Document105 pagesChapter 1(s)chanky-wp22No ratings yet
- INFORMS Is Collaborating With JSTOR To Digitize, Preserve and Extend Access To Operations ResearchDocument34 pagesINFORMS Is Collaborating With JSTOR To Digitize, Preserve and Extend Access To Operations ResearchPabloNo ratings yet
- L10 L12Document4 pagesL10 L12Luise FangNo ratings yet
- Systems and MatricesDocument15 pagesSystems and MatricesTom DavisNo ratings yet
- A Note of The Linear Equation AX B With Multiplicatively-RegulerDocument6 pagesA Note of The Linear Equation AX B With Multiplicatively-RegulerRumah CerdasNo ratings yet
- Stress RecoveryDocument6 pagesStress RecoveryVipin NairNo ratings yet
- Simulink Modelling of The Transient CaseDocument39 pagesSimulink Modelling of The Transient CaseMUSAIB UL FAYAZ 2022 17No ratings yet
- MAT 1332D W12: Midterm Exam Review: Equilibrium Points, Stability, and Phase-Line DiagramsDocument10 pagesMAT 1332D W12: Midterm Exam Review: Equilibrium Points, Stability, and Phase-Line DiagramsAnggraeni DianNo ratings yet
- Linear Algebra NotesDocument66 pagesLinear Algebra NotesManuela OrtizNo ratings yet
- MargulisDocument7 pagesMargulisqbeecNo ratings yet
- 18mab302t DM Unit 1Document74 pages18mab302t DM Unit 1Aakash PayalaNo ratings yet
- Global Asymptotic Stability of Solutions of A Functional Integral EquationDocument8 pagesGlobal Asymptotic Stability of Solutions of A Functional Integral EquationLuis Arce GonzálezNo ratings yet
- The Pseudoinverse of A Rectangular Matrix and Its Statistical ApplicationsDocument6 pagesThe Pseudoinverse of A Rectangular Matrix and Its Statistical Applicationsvahid mesicNo ratings yet
- TCS PPTsDocument114 pagesTCS PPTsAman JamshedNo ratings yet
- Things To Know PDFDocument7 pagesThings To Know PDFJohn ChenNo ratings yet
- Chapter 1Document13 pagesChapter 1Aniket BhandareNo ratings yet
- Unique - Solution MatriksDocument4 pagesUnique - Solution MatriksMasyitah FitridaNo ratings yet
- Math BookDocument160 pagesMath BookDonovan WrightNo ratings yet
- Real Variables with Basic Metric Space TopologyFrom EverandReal Variables with Basic Metric Space TopologyRating: 5 out of 5 stars5/5 (1)
- Computing of Test Statistic On Population MeanDocument36 pagesComputing of Test Statistic On Population MeanKristoffer RañolaNo ratings yet
- History of The Sikhs by Major Henry Cour PDFDocument338 pagesHistory of The Sikhs by Major Henry Cour PDFDr. Kamalroop SinghNo ratings yet
- Fss Presentation Slide GoDocument13 pagesFss Presentation Slide GoReinoso GreiskaNo ratings yet
- Theories of International InvestmentDocument2 pagesTheories of International InvestmentSamish DhakalNo ratings yet
- ISBN Safe Work Method Statements 2022 03Document8 pagesISBN Safe Work Method Statements 2022 03Tamo Kim ChowNo ratings yet
- Technology Management 1Document38 pagesTechnology Management 1Anu NileshNo ratings yet
- Damodaram Sanjivayya National Law University Visakhapatnam, A.P., IndiaDocument25 pagesDamodaram Sanjivayya National Law University Visakhapatnam, A.P., IndiaSumanth RoxtaNo ratings yet
- Assignment#10 Global Strategy and The Multinational CorporationDocument1 pageAssignment#10 Global Strategy and The Multinational CorporationAnjaneth A. VillegasNo ratings yet
- Career Essay 1Document2 pagesCareer Essay 1api-572592063No ratings yet
- Digital MetersDocument47 pagesDigital MetersherovhungNo ratings yet
- 8.ZXSDR B8200 (L200) Principle and Hardware Structure Training Manual-45Document45 pages8.ZXSDR B8200 (L200) Principle and Hardware Structure Training Manual-45mehdi_mehdiNo ratings yet
- Plaza 66 Tower 2 Structural Design ChallengesDocument13 pagesPlaza 66 Tower 2 Structural Design ChallengessrvshNo ratings yet
- LTE Networks Engineering Track Syllabus Overview - 23 - 24Document4 pagesLTE Networks Engineering Track Syllabus Overview - 23 - 24Mohamed SamiNo ratings yet
- Tplink Eap110 Qig EngDocument20 pagesTplink Eap110 Qig EngMaciejNo ratings yet
- Nama: Yossi Tiara Pratiwi Kelas: X Mis 1 Mata Pelajaran: Bahasa InggrisDocument2 pagesNama: Yossi Tiara Pratiwi Kelas: X Mis 1 Mata Pelajaran: Bahasa InggrisOrionj jrNo ratings yet
- .Urp 203 Note 2022 - 1642405559000Document6 pages.Urp 203 Note 2022 - 1642405559000Farouk SalehNo ratings yet
- Pe 03 - Course ModuleDocument42 pagesPe 03 - Course ModuleMARIEL ASINo ratings yet
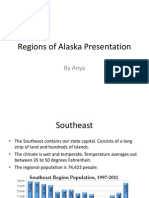
- Regions of Alaska PresentationDocument15 pagesRegions of Alaska Presentationapi-260890532No ratings yet
- Chapter3 Elasticity and ForecastingDocument25 pagesChapter3 Elasticity and ForecastingGee JoeNo ratings yet
- Arnold Ventures Letter To Congressional Social Determinants of Health CaucusDocument7 pagesArnold Ventures Letter To Congressional Social Determinants of Health CaucusArnold VenturesNo ratings yet
- Introduction-: Microprocessor 68000Document13 pagesIntroduction-: Microprocessor 68000margyaNo ratings yet
- Electro Fashion Sewable LED Kits WebDocument10 pagesElectro Fashion Sewable LED Kits WebAndrei VasileNo ratings yet
- Obesity - The Health Time Bomb: ©LTPHN 2008Document36 pagesObesity - The Health Time Bomb: ©LTPHN 2008EVA PUTRANTO100% (2)
- B. Geoinformatics PDFDocument77 pagesB. Geoinformatics PDFmchakra720% (1)
- Turn Around Coordinator Job DescriptionDocument2 pagesTurn Around Coordinator Job DescriptionMikeNo ratings yet