Professional Documents
Culture Documents
Mathematical Aspects of Thermoacoustics PDF
Uploaded by
Moses DevaprasannaOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Mathematical Aspects of Thermoacoustics PDF
Uploaded by
Moses DevaprasannaCopyright:
Available Formats
Mathematical Aspects of
Thermoacoustics
Copyright c _2009 by P.H.M.W. in t panhuis, Eindhoven, The Netherlands.
All rights are reserved. No part of this publication may be reproduced, stored in a re-
trieval system, or transmitted, in any form or by any means, electronic, mechanical,
photocopying, recording or otherwise, without prior permission of the author.
Printed by Print Service Technische Universiteit Eindhoven
Cover design by Jorrit van Rijt
A catalogue record is available from the Eindhoven University of Technology Library
ISBN 978-90-386-1862-3
NUR 919
Subject headings: thermoacoustics; acoustics; acoustic streaming; thermodynamics; per-
turbation methods; numerical methods; boundary value problems; nonlinear analysis;
shock waves.
This research was nancially supported by the Technology Foundation (STW), grant
number ETTF.6668.
Mathematical Aspects of
Thermoacoustics
PROEFSCHRIFT
ter verkrijging van de graad van doctor aan de
Technische Universiteit Eindhoven, op gezag van de
rector magnicus, prof.dr.ir. C.J. van Duijn, voor een
commissie aangewezen door het College
voor Promoties in het openbaar te verdedigen
op donderdag 25 juni 2009 om 16.00 uur
door
Petrus Hendrikus Maria Wilhelmus in t panhuis
geboren te Roermond
Dit proefschrift is goedgekeurd door de promotor:
prof.dr. J.J.M. Slot
Copromotoren:
dr. S.W. Rienstra
en
prof.dr. J. Molenaar
To Ik Cuin
Preface
This project is part of a twin PhD program between the Departments of Mathemat-
ics and Computer Science and Applied Physics and is sponsored by the Technology
Foundation (STW), Royal Dutch Shell, the Energy Research Centre of the Netherlands
(ECN), and Aster Thermoacoustics. I would like to express thanks to all people who
participated in this project. First and foremost I would like to thank my mathematical
supervisors dr. Sjoerd Rienstra, prof.dr. Han Slot, and prof.dr. Jaap Molenaar for their
expert guidance and stimulating support. I am also indebted to my physics colleagues
Paul Aben, dr. Jos Zeegers, and prof.dr. Fons de Waele, who helped to broaden and
deepen my understanding of the physics involved. I am also grateful for the many
useful discussions I have had with the people from ECN, Aster Thermoacoustics, and
Shell.
My defense committee is formed by prof.dr. Anthony Atchley, prof.dr. Bendiks-Jan
Boersma, and prof.dr. Mico Hirschberg, together with my supervisors dr. Sjoerd Rien-
stra, prof.dr. Han Slot, and prof.dr. Jaap Molenaar. I would like to thank them for the
time invested and their willingness to judge my work. I also want to thank prof.dr. Bob
Mattheij for agreeing to be part of the extended defense committee.
What made these four years especially enjoyable was the great working atmosphere
within CASA and the Low Temperature group. My special thanks go out to my of-
ce mate and partner-in-crime Erwin who started and nished his PhD (and Master)
at the same time as I did. Many thanks also to all the current and former colleagues
that I have had the pleasure to work with, in particular the PhD students and postdocs:
Aga, Ali, Andriy, Bart, Berkan, Christina, Darcy, Davit, Dragan, Hans, Jurgen, Kakuba,
Kamyar, Kundan, Laura, Marco, Maria (2), Mark, Matthias, Maxim, Michiel, Miguel,
Mirela, Nico, Oleg, Patricio, Paul, Remko, Remo, Roxana, Shruti, Sven, Tasnim, Temes-
gen, Valeriu, Venkat, Wenqing, Yabin, Yan, Yixin, Yves, Zoran. I fondly think back to
our daily lunches at the Kennispoort, the weekly poker games, the road-trips to Den-
mark, the regular squash/tennis/football games, and the many nights in town that I
have enjoyed with so many of you. Our two secretaries Mar` ese and Enna also deserve
a special word of thanks, for making life of a PhD student so much easier by taking care
of all administrative details. I am also thankful to the members of the football teams
Pusphaira and Old Soccers, and hope they will have more success without me.
On a more personal level, I would like to thank all my friends and family, for their
continuous love and support. I especially want to show appreciation to my mom for
her unbridled enthusiasm and my dad, who I wish could have been here today. I also
want to thank my siblings Jos, Hellen, and Dorris and their signicant others Marjanne,
Joram, and Tonnie. Of course I should not forget to mention my little nephew Sep, who
ii Preface
is getting so big now. Last, but denitely not least, I would like to thank my girlfriend
Jessey, to whom this thesis is dedicated, for her unlimited love and patience in these last
few months.
Peter in t panhuis
Eindhoven, May 2009
Nomenclature
General symbols and variables
A [m
2
] cross-sectional area
/ [m
2
] cross-section
b [ms
2
] specic body force eld
c [m s
1
] speed of sound
C
p
[J kg
1
K
1
] isobaric specic heat
C
s
[J kg
1
K
1
] specic heat of stack material
C
v
[J kg
1
K
1
] isochoric specic heat
d [m] diameter
f [Hz] frequency
f
viscous Rott function
f
k
thermal Rott function
f
s
solid Rott function
F
viscous Arnott function
F
k
thermal Arnott function
F
s
solid Arnott function
T Fourier transform
G Greens function
g [ms
2
] gravitational acceleration
H [W] total power
h [J kg
1
] specic enthalpy
Im imaginary part
k [m
1
] wave number
K [W K
1
m
1
] thermal conductivity
[m] displacement
L [m] typical length
m [kg m
2
s
1
] time-averaged mass ux
M [kg m
2
s
1
] time-averaged volumetric mass ux
n [mol s
1
] molar ow rate
P [W] power
p [Pa] pressure
p
A
[Pa] pressure oscillation amplitude
p
amb
[Pa] ambient pressure
iv Nomenclature
Q [W] heat ow per unit time
q [W m
2
] heat ux
r [m] radial coordinate
Re real part
R
spec
[J kg
1
K
1
] specic gas constant
1 [m] radius
s [J kg
1
K
1
] specic entropy
S [J kg
1
] entropy
S surface
S
u
[K] Sutherlands constant
t [s] time
T [K] temperature
U [m s
1
] typical uid speed
U [W] internal energy
v = (u, v, w) [m s
1
] velocity vector
V [m
3
] volume
W [W] acoustic power
x = (x, y, z) [m] spatial coordinate
Z [N s m
3
] impedance
[K
1
] isobaric volumetric expansion coefcient
boundary, interface
[m] penetration depth
[J kg
1
] specic internal energy
[m] wave length
[Pa s] dynamic (shear) viscosity
[Pa s] second viscosity
[kg m
3
] density
[N m
2
] viscous stress tensor
[rad] angular coordinate
[rad s
1
] angular frequency of the acoustic oscillations
Dimensionless numbers
A amplitude
B
r
blockage ratio
COP coefcient of performance
COPR relative coefcient of performance
COPC Carnot coefcient of performance
D
r
drive ratio
F
r
Froude number
M
a
acoustic Mach number
N
L
Lautrec number gas
N
s
Lautrec number solid
P
r
Prandtl number
R reection coefcient
Nomenclature v
S
k
Strouhal number based on
k
W
o
Womersley number
W
second Womersley number
coefcient of nonlinearity
ratio specic heats
coefcient of stack dissipation
deviation from resonance
coefcient of weak nonlinearity
efciency
R
relative efciency
C
Carnot efciency
aspect ratio
driver Mach number
s
stack heat capacity ratio
Helmholtz number
ratio thermal conductivities
porosity
dimensionless viscosity
Sub- and superscripts and special operators
a dimensionless
a time averaging
a) transverse averaging
a per unit time
a
complex conjugate
a
re f
reference value
a
+
top plate
a
bottom plate
a
0
steady zeroth order
a
1
rst harmonic
a
2,0
steady second order (streaming)
a
2,2
second harmonic
a
C
cold
a
H
hot
a
g
gas, uid
a
k
thermal
a
L
thermal
a
p
isobaric
a
R
right
a
s
solid, source, stack center
a
t
outer
a
transverse components
a
v
isochoric
a
viscous
vi Nomenclature
Contents
Preface i
Nomenclature iii
1 Introduction 1
1.1 A historical perspective . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 The basic mechanism of thermoacoustics . . . . . . . . . . . . . . . . . . . 6
1.3 Classication . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.4 Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.5 Thesis overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.6 Literature review . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2 Thermodynamics 17
2.1 Laws of thermodynamics . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.2 Thermodynamic performance . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.2.1 Refrigerator or heat pump . . . . . . . . . . . . . . . . . . . . . . . 19
2.2.2 Prime mover . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.3 The thermodynamic cycle . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.3.1 Standing-wave phasing . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.3.2 Traveling-wave phasing . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.3.3 Bucket-brigade effect . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3 Modeling 27
3.1 Geometry . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.2 Governing equations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.3 Scaling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.4 Small-amplitude and long-pore approximation . . . . . . . . . . . . . . . . 34
4 Thermoacoustics in two-dimensional pores with variable cross-section 37
4.1 Governing equations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
4.2 Acoustics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
4.3 Mean temperature . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
4.4 Integration of the generalized Swift equations . . . . . . . . . . . . . . . . 51
4.4.1 Exact solution at constant temperature . . . . . . . . . . . . . . . . 52
4.4.2 Short-stack approximation . . . . . . . . . . . . . . . . . . . . . . . 54
4.4.3 Approximate solution in short wide channels . . . . . . . . . . . . 56
viii Contents
4.5 Acoustic streaming . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
4.6 Second harmonics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
4.7 Power . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
4.7.1 Acoustic power . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
4.7.2 Total power . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
5 Thermoacoustics in three-dimensional pores with variable cross-section 73
5.1 Acoustics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
5.2 Mean temperature . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
5.3 Integration of the generalized Swift equations . . . . . . . . . . . . . . . . 83
5.3.1 Ideal stack . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
5.3.2 Rotationally symmetric pores . . . . . . . . . . . . . . . . . . . . . . 84
5.4 Acoustic streaming . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
5.5 Second harmonics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
5.6 Power . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
6 Standing-wave devices 93
6.1 Design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
6.2 Computations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
6.3 A thermoacoustic couple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
6.3.1 Acoustically generated temperature differences . . . . . . . . . . . 97
6.3.2 Acoustic power . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
6.4 A standing-wave refrigerator . . . . . . . . . . . . . . . . . . . . . . . . . . 100
6.5 A standing-wave prime mover . . . . . . . . . . . . . . . . . . . . . . . . . 108
6.6 Streaming effects in a thermoacoustic stack . . . . . . . . . . . . . . . . . . 112
7 Traveling-wave devices 115
7.1 A traveling-wave prime mover . . . . . . . . . . . . . . . . . . . . . . . . . 116
7.2 Computations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
7.2.1 Regenerator and thermal buffer tube . . . . . . . . . . . . . . . . . . 119
7.2.2 Optimization procedure . . . . . . . . . . . . . . . . . . . . . . . . . 120
7.3 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
7.3.1 Temperature . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
7.3.2 Regenerator efciency . . . . . . . . . . . . . . . . . . . . . . . . . . 125
7.3.3 Geometry optimization . . . . . . . . . . . . . . . . . . . . . . . . . 129
8 Nonlinear standing waves 133
8.1 Governing equations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
8.1.1 Kuznetsovs equation . . . . . . . . . . . . . . . . . . . . . . . . . . 134
8.1.2 Bernoullis equation . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
8.1.3 Perturbation expansion . . . . . . . . . . . . . . . . . . . . . . . . . 136
8.2 Solution away from resonance . . . . . . . . . . . . . . . . . . . . . . . . . . 139
8.2.1 Arbitrary excitation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
8.2.2 Harmonic excitation . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
8.3 Solution near resonance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
8.3.1 Exact solution when
=
= 0 using Mathieu functions . . . . . . 143
8.3.2 Steady-state solution for
= O(1) . . . . . . . . . . . . . . . . . . . 144
8.3.3 Steady-state solution for
= O(
1
) . . . . . . . . . . . . . . . . . 148
Contents ix
8.4 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154
8.4.1 Nonlinear standing waves in a closed tube . . . . . . . . . . . . . . 155
8.4.2 Nonlinear standing waves in a thermoacoustic refrigerator . . . . . 157
9 Conclusions and discussion 161
Appendices 165
A Thermodynamic constants and relations 165
B Derivations 167
B.1 Total-energy equation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167
B.2 Temperature equation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 168
C Greens functions 169
C.1 F
j
-functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 169
C.2 F
j,2
-functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171
C.3 Greens functions for various stack geometries . . . . . . . . . . . . . . . . 172
Bibliography 175
Index 185
Summary 187
Samenvatting 189
Curriculum Vitae 191
x Contents
Chapter 1
Introduction
As the name indicates, thermoacoustics combines the elds of thermodynamics and
acoustics and describes the interaction between heat and sound. The term was rst
coined in 1980 by Rott [119] who described its meaning as rather self-explanatory. Ac-
cording to Rott the most general interpretation of thermoacoustics includes all effects
in acoustics in which heat conduction and entropy variations of the (gaseous) medium
play a role.
Ordinarily a sound wave in a uid is seen as the combined effect of pressure and
velocity (displacement) oscillations, but as a response to these (isentropic) pressure os-
cillations, temperature oscillations may occur as well. In free space the temperature
variations will be small and the gas parcels will expand and compress adiabatically.
However, when the uid is allowed to interact thermally with solid boundaries, heat
transfer between the gas and the solid will take place and a wide range of thermoacous-
tic effects may occur.
It has been realized that under the right operating conditions these thermoacoustic
concepts can be harnessed and exploited to create two kinds of thermoacoustic devices:
the refrigerator or heat pump that turn sound into useful refrigeration or heating, and the
prime mover that turns heat into useful (acoustic) work. Typically, such devices are con-
structed from straight or looped tubes with a porous medium suitably located inside.
Thermoacoustic devices can be of much practical use, because signicant amount
of heat and mechanical power can be produced at a reasonable efciency. Moreover,
in contrast to more conventional engines and refrigerators, they can operate without
cranks and pistons, and usually have no more than one (mechanically) moving part.
Because of this and their inherent simplicity, they are very reliable, require little mainte-
nance, and can be produced at relatively low cost. Furthermore, thermoacoustic devices
are friendly to the environment, as they use environmentally friendly gases, produce
no toxic waste, and are easily adaptable to use solar power [27] or industrial waste
heat [127] as a driving source. Currently, research is also being done on the possibil-
ities of using biomass to drive a thermoacoustic stove [112], to be used in developing
countries.
Despite all these advantages there are still some challenges left that need to be re-
solved before thermoacoustic devices can be used competitively on a large scale. Firstly,
due to the oscillatory nature of the ow and the interaction with solid boundaries all
2 1.1 A historical perspective
kinds of complicated ow patterns may arise, such as vortex shedding, turbulence, or
asymmetric ow. Furthermore, the heat transfer is far from ideal and entropy is created.
Additionally, thermoacoustic devices often operate at high pressure amplitudes, which
can give rise to various nonlinear effects, such as the build-up of shock waves. The com-
bined effect of all these phenomena can and will degrade the performance and holds
back the development of highly efcient devices. Moreover, as long as these effects are
not understood and modeled systematically, it will be hard to make accurate theoretical
predictions. The mathematical aspects of oscillatory gas ow with heat transfer to solid
boundaries in wide or narrow pores will be the topic of this thesis.
1.1 A historical perspective
Thermoacoustics has a long history that dates back more than two centuries. The inter-
est in thermoacoustics was rst piqued in 1816, when Laplace showed that even Newton
was not infallible. Laplace [72] pointed out that Newtons approximation of the speed
of sound [92] was incorrect because he assumed isothermal compression and expansion
of the air and did not compensate for variations in temperature. Correcting for these
effects, Laplace found a value that was 18% higher.
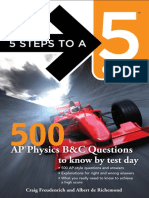
Hydrogen
supply
Flame
(a) Higgins singing ame
Wire
screen
Generation
of sound
Convection
ow
(b) Rijke tube
Figure 1.1: (a) Higgins singing ame: for suitable positions of the ame the tube will start to
produce sound. (b) The Rijke tube: the loudest sound is produced when the heated wire screen is
positioned at one-fourth from the bottom of the pipe.
The rst records of heat-driven oscillations are the observations of Higgins [54, 102]
in 1777, who experimented with an open glass tube in which acoustic oscillations were
excited by suitable placement of a hydrogen ame, the so-called singing ame. A
Introduction 3
similar, but more famous experiment was performed by Rijke [111] who in his efforts to
design a new musical instrument from an organ pipe, constructed the so-called Rijke
tube. As depicted in gure 1.1, he replaced Higgins hydrogen ame by a heated wire
screen and found that when the screen was positioned in the lower half of the open
tube spontaneous oscillations would occur, which were strongest when the screen was
located at one fourth of the pipe. The oscillations would stop if the top of the tube was
closed, indicating that the convective air current through the pipe was necessary for
sound to be produced. Higgins and Rijkes work later led to the birth of combustion
science, with applications in rocket science and weapon industry. For a full review
on devices related to the Rijke tube we refer to Feldman [41] or more recently Raun
et al. [108].
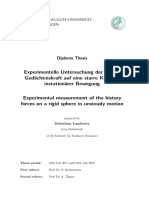
The earliest predecessor of the type of thermoacoustic prime movers considered in
this thesis is the Sondhauss tube, depicted in gure 1.2. It was invented in 1850 by Sond-
hauss [126] based on an effect often noticed by glass blowers: generation of loud sound
when a hot bulb is blown at the end of a cold narrow tube. Sondhauss found that if a
steady gas ame was supplied to the closed bulb, the tube would produce a clear sound
which was characterized by the length of the tube; the larger the bulb or the longer the
tube, the lower the frequency of the sound. Unfortunately, Sondhauss did not manage
to explain why the oscillations arose. Feldman [42] also reviewed most of the phenom-
ena related to the Sondhauss tube as he did for the Rijke tube. An important difference
between these two devices is that the Sondhauss tube does not require a convective air
current for oscillations to occur.
Bulb Tube stem
Sound Flame
Figure 1.2: The Sondhauss tube: sound is generated from the tip of the stem, when heat is
supplied to the bulb.
Another early example of a thermoacoustic prime mover is the phenomenon known
as Taconis oscillations, often observed in cryogenic storage vessels. Taconis [139]
cooled a gas-lled tube from room temperature to a cryogenic temperature by inserting
it into liquid helium and observed spontaneous oscillations of the gas. The conditions
for these type of oscillations have been investigated experimentally by Yazaki et al. [156].
The rst qualitative explanation for heat-driven oscillations was given in 1887 by
Lord Rayleigh. In his classical work The Theory of Sound [109], he explains the pro-
duction of thermoacoustic oscillations as an interplay between heat uxes and density
variations:
4 1.1 A historical perspective
If heat be given to the air at the moment of greatest condensation (compression)
or taken from it at the moment of greatest rarefaction (expansion), the vibration is
encouraged.
Rayleighs qualitative understanding turned out to be correct, but a quantitatively ac-
curate theoretical description of these phenomena was not achieved until much later.
The reverse process, generating temperature differences using acoustic oscillations,
is a relatively new phenomenon. In 1964 Gifford and Longsworth [48] invented the
pulse-tube refrigerator, by which they managed to cool down to a temperature of 150
K. In their device, depicted in gure 1.3, heat was pumped along the tube wall by sup-
plying pressure pulses at low frequencies. Initially it was considered nothing more than
an academic curiosity as it was highly inefcient, but current-day pulse-tube cryocool-
ers can reach efciencies up to 20% of the ideal efciency and temperatures as low as
2 K. In fact, nowadays pulse-tube refrigeration is one of the most favored technologies
for cryocooling . For a complete history and review of pulse-tube crycooling we re-
fer to Radebaugh [104, 105]. Detailed modeling and numerical analysis of pulse-tube
refrigerators can be found in [7981].
Rotary
valve
Vent
High-pressure
source
Regenerator
Cold end
Pulse
tube
Room
temperature
Figure 1.3: The pulse-tube refrigerator of Gifford and Longsworth. The temperature is cooled
from room temperature at the hot end to 150 K at the cold end.
Sound-driven cooling was also observed by Merkli and Thomann [88] when they
performed experiments on cooling in a simple gas-lled piston-driven resonator. To ex-
plain these effects an extended acoustic theory was developed which predicted cooling
in the tube where the velocity amplitude was at its maximum, in good agreement with
the experiments.
A crucial advance in experimental thermoacoustics came in 1962 when Carter et al.
[22] realized that the performance of the Sondhauss tube could be improved by suitable
placement of a porous medium inside, in the form of a stack of parallel plates. The
presence of a stack, with heat transfer from one end to the other, makes it much easier
to produce a signicant temperature difference and will be the essential ingredient for
the kind of thermoacoustic devices considered in this thesis.
The foundation for theoretical thermoacoustics was laid in 1868 by Kirchhoff [66],
Introduction 5
who investigated the acoustic attenuation in a duct due to oscillatory heat transfer be-
tween the isothermal tube wall and the gas inside the tube. His results were generalized
by Kramers [67] for a tube supporting a temperature gradient. The breakthrough came
in 1969 when Rott et al. , inspired by the Taconis oscillations, started an impressive se-
ries of articles [91, 115118, 120, 121], in which a linear theory of thermoacoustics was
derived. Rott abandoned the boundary-layer approximation as used by Kirchhoff and
Kramers, and formulated the mathematical framework for small-amplitude damped
and excited oscillations in wide and narrow tubes with an axial temperature gradient,
only assuming that the tube radius was much smaller than the length of the tube. In
1980 Rott summarized his results in a review work [119], which became the cornerstone
for the subsequent intensied interest in thermoacoustics.
In the eighties a very intensive and successful research program was started at the
Los Alamos National Laboratory by Wheatley, Swift, and coworkers [133, 151, 152]. Us-
ing Rotts theory of thermoacoustic phenomena they started to design and build practi-
cal thermoacoustic devices. Important was Hoers invention of a standing-wave ther-
moacoustic refrigerator [55, 56], which proved that Rotts theoretical analysis was cor-
rect. Hoers refrigerator, shown in gure 1.4, used a loudspeaker to drive a closed
resonator tube with a stack of plates positioned near the speaker. At the other end of
the tube a resonator sphere was attached to simulate an open ending, so that effectively
one can speak of a quarter-wave-length resonator. Inside the refrigerator a standing-
wave is maintained by the speaker, generating a temperature difference across the stack
such that heat is absorbed at the low temperature or waste heat is released at the high
temperature.
Hot heat exchanger
Cold heat exchanger
Driver Stack
Resonator
sphere
Figure 1.4: Hoers standing-wave refrigerator. The hot end of the stack is thermally anchored
at room temperature and the standing wave generates cooling at the cold end of the stack.
A whole new branch of thermoacoustic devices started in 1979 with Ceperleys real-
ization [23, 24] that thermoacoustic devices based on the Stirling cycle [21] with ideal
heat transfer, could reach much higher efciencies than devices based on standing-
wave modes of operation. His idea was to design machines that allow a traveling wave
to pass through a dense porous medium (the regenerator) using a toroidal geometry.
Yazaki et al. [155] managed to build a traveling-wave prime mover based on these prin-
ciples, but at very low efciency due to large viscous losses. Finally, Backhaus and
Swift [14] managed to overcome these problems by designing a traveling-wave prime
mover (shown in gure 1.5) that combines the toroidal geometry with a resonator tube
to reduce the velocities in the loop.
Swift was the rst to give a comprehensive analysis of thermoacoustic devices in his
6 1.2 The basic mechanism of thermoacoustics
Resonator
Load
Jet pump
Regenerator
Figure 1.5: Schematic drawing of the traveling-wave prime mover of Backhaus and Swift. The
sound produced by the regenerator is absorbed by an acoustic load that is attached to the regen-
erator.
review article [131] based on Rotts work. He also gives a detailed description of the
thermodynamics involved, a complete historical overview, experimental results, and he
treats several types of devices. Since then Swift and others have contributed much to the
further development and analysis of thermoacoustic devices. Most of the literature has
been collected and summarized in Garretts review work [45]; in particular we mention
Swifts textbook [135], which provides a clear introduction into thermoacoustics. Lastly,
we note that several articles have been written as well [15, 47, 133, 150, 153], aimed at
readers new to the eld of thermoacoustics, while various educational animations can
be found at the website of Los Alamos National Laboratory [130].
1.2 The basic mechanism of thermoacoustics
The thermoacoustic principles can be understood best by following a given parcel of
uid as it oscillates near a solid boundary. We start by considering uid parcels oscillat-
ing far away from the wall in a closed tube supporting a standing wave or in a innite
tube supporting a traveling wave, as depicted in gure 1.6. Note that under isentropic
conditions the pressure oscillations are accompanied by temperature oscillations, which
is used in gures 1.6(c) and 1.6(d) to draw schematically the temperature-position cycle
that a uid parcel undergoes during one oscillation.
Consider a uid parcel oscillating in the closed tube, far away from the tube wall. In
the center of the tube we have a pressure node and a velocity antinode. As a result the
parcel will undergo large displacement without temperature variations. On the other
hand, near the ends of the tube we have a pressure antinode and a velocity node, and the
parcel will almost stand still and undergo large temperature variations, giving a very
steep temperature gradient. If the parcel is oscillating away from a velocity or pressure
node, then a nite nonzero temperature gradient will arise. Within thermoacoustics the
slope of these adiabatic temperature variations is known as the critical temperature
gradient.
In the innite tube the situation is somewhat different, since the pressure and ve-
locity oscillations are in phase for all positions in the tube. As a result the parcels al-
ternately move to the right with a high temperature and then to the left with a lower
temperature, giving circle-like temperature-position cycles. It follows that when a small
traveling-wave component is added to a standing wave, or vice versa, the thermody-
Introduction 7
(a) (b)
T
x
(c)
T
x
(d)
T
x
(e)
Figure 1.6: Gas parcels oscillating (a) with standing-wave phasing in a closed tube and (b) with
traveling-wave phasing in an innite tube. The pressure oscillations are indicated by dashed
lines, the velocity oscillations by solid lines, and the arrows give the direction of oscillation. (c)
The temperature of the gas parcel during one oscillation as a function of its position relative to the
standing wave. (d) Temperature-position diagram for traveling wave. (e) Temperature-position
diagram when a small traveling-wave component is added to the standing wave.
namic cycles will turn into tilted ellipses as shown in gure 1.6(e).
Suppose we look at the same parcels, but now oscillating near a wall supporting a
temperature gradient in axial direction. We consider two cases:
(a) The tube wall supports a much smaller temperature gradient than the critical tem-
perature gradient of the uid parcel. As a result heat will be transported from the
gas parcel into the wall at the hot end and from the wall into the gas parcel at the
cold end (gure 1.7(a)). The transport of heat from the low temperature to the hot
temperature will require the input of acoustic work. This is the condition for a
refrigerator or heat pump.
(b) The tube wall supports a much larger temperature gradient than the critical tem-
perature gradient of the uid parcel. As a result heat will be transported from the
wall into the gas parcel at the hot end and from the gas parcel into the wall at the
cold end (gure 1.7(b)). The transport of heat from the high temperature to the
low temperature will produce acoustic work as output. This is the condition for a
prime mover.
This is in a nutshell the basic mechanism of thermoacoustics. In the next chapter we
will analyze the combined effect of oscillations and heat transfer in more detail using
Brayton [21] and Stirling cycles [145]. Specically we will show how the distance to
8 1.3 Classication
the solid and the phasing of pressure and velocity affect the heat transfer between gas
and solid.
T
position parcel
Q
Q
parcel
wall
(a) Refrigerator
T
position parcel
Q
Q
parcel
wall
(b) Prime mover
Figure 1.7: The temperature-position diagram for the adiabatic parcel-temperature oscillations
() and the wall temperature (- -). In (a) we consider a refrigerator and apply a small tempera-
ture difference and in (b) we consider a prime mover with large temperature difference across the
wall. The arrows show the transport of heat Q from the wall to the gas parcel and vice versa.
1.3 Classication
We consider thermoacoustic devices of the type shown in gure 1.8, that is, a possibly
looped duct containing a uid (usually a gas) and a porous solid medium, if necessary
with neighboring heat exchangers. In addition loudspeakers or other sources of sound
may be attached to the ends of the tubes. The porous medium is modeled as a collection
of narrow arbitrarily shaped pores aligned in the direction of sound propagation. Typ-
ical examples are parallel plates and circular or rectangular pores. As will be discussed
below, thermoacoustic devices can be divided [45] into several categories: heat-driven
versus sound-driven devices, standing-wave versus traveling-wave devices, or stack-
based versus regenerator-based devices.
Prime mover vs. refrigerator
We distinguish heat-driven and sound-driven devices. A thermoacoustic prime mover
absorbs heat at a high temperature and exhausts heat at a lower temperature while
producing acoustic work as an output. Arefrigerator or heat pump absorbs heat at a low
temperature and requires the input of acoustic work to exhaust more heat to a higher
temperature. The only difference between a heat pump and a refrigerator is whether
the purpose of the device is to extract heat at the lower temperature (refrigeration) or to
reject heat at the higher temperature (heating). Therefore, in this thesis we will use the
term refrigerator loosely to refer to either of these devices.
Introduction 9
(a) straight duct (b) looped duct
Figure 1.8: Schematic view of two possible duct congurations: straight or looped.
In the literature the term thermoacoustic engine is used as well, either to indicate a
thermoacoustic prime mover or as a general term to describe all thermoacoustic devices.
To avoid confusion we will refrain from using this term.
Stack-based devices vs. regenerator-based devices
A second classication depends on whether the porous medium used to exchange heat
with the working uid is a stack or a regenerator. Typically inside a regenerator
the pore size is much smaller than inside a stack. Garrett [45] uses the so-called Lautrec
number N
L
to indicate the difference between a stack and regenerator. The Lautrec
number is dened as the ratio between the half pore size and the thermal penetration
depth
1
. Gas parcels that are separated from the wall by a distance much larger than the
thermal penetration depth, will have no thermal contact with the wall. If N
L
1 the
porous medium is called a stack and the gas parcels in the stack will have imperfect
thermal contact with the solid. If N
L
1, then the porous medium is called a regen-
erator, and the gas parcels inside the regenerator will have perfect thermal contact with
the solid. Whenever the pore size is unknown or irrelevant, the porous medium will be
referred to as stack.
Standing-wave devices vs. traveling-wave devices
Lastly, thermoacoustic devices can also be categorized depending on the phase shift
between the pressure and velocity oscillations at the location of the stack. In a closed
and empty resonator a pure standing-wave can be maintained and the pressure and
velocity oscillations will be exactly 90 degrees out of phase. In an empty innite tube
(or a loop) a pure traveling-wave can be maintained, so that the pressure and velocity
oscillations are exactly in phase. As soon as we insert a stack in either of these tubes,
the phasing between pressure and velocity will change because of partial reection at
the stack interfaces. Moreover, if we consider a looped tube of the type depicted in
1
The thermal penetration depth is the distance heat can diffuse through within a characteristic time
10 1.4 Applications
gure 1.8(b), with a resonator tube attached to it, the phasing will be affected even
more. However, in practise both the straight geometry depicted in gure 1.8(a) and the
looped geometry depicted in gure 1.8(b) can be chosen such that the sound eld at the
stack is predominantly a standing wave or a traveling wave.
In Section 2.3 we will show that it is benecial to use a stack inside a standing-wave
device and a regenerator inside a traveling-wave device. For this reason thermoacoustic
devices are usually classied as either standing-wave stack-based devices or traveling-
wave regenerator-based devices.
1.4 Applications
Over the years thermoacoustic devices have found applications in areas like food in-
dustry, defense industry, spacecraft, telecommunication, electronics, energy sectors, and
consumer products. Some of these devices are heat-driven, some are sound-driven, and
others combine the two effects. In this section we will treat a few examples that have
been or will be used commercially. Most of these applications are motivated by the
quest for reliable, cheap, or environmentally friendly sources of energy.
Down-well power generation
The natural-gas industry use sensors to measure properties of the gas that streams
through subterranean gas pipes. These sensors are located far below ground and need
electrical power, which has to be delivered via batteries or long cables. The reliability
of such equipment is usually quite poor, requiring costly repairs or replacements due to
difcult accessibility and extreme operating conditions. Since most wells are used for
many years, there is a necessity for a cheap and reliable alternative for power genera-
tion, which thermoacoustics can provide.
stack
main ow
Figure 1.9: Schematic drawing of the side-branch system. A standing wave is generated in the
side branches due to the interaction of the main ow, supplied by the pipeline, with the edges of
the side branch. If a stack is suitably positioned in the standing wave, a temperature difference
can be generated.
The answer lies in a technique suggested by Slaton and Zeegers [123125], which
avoids the use of moving parts and uses part of the main-ow energy in the gas pipes
Introduction 11
to generate aero-acoustic sound. In their experimental set-up, shown in gure 1.9, they
attach two side branches to the main pipeline. Due to the interaction of the main ow
with the edges of the side branch, vortices will be created. By adjusting the lengths
of the side branch to the ow speed, it is possible to match the frequency of the vor-
tex shedding with the fundamental standing-wave mode of the side branch, and a
standing-wave sound eld is created in the side branch. Finally, by suitable placement
of a stack a temperature difference can be generated, which can be used to produce
electrical power with thermoelectric elements. The ow patterns and vortex shedding
in such side-branch systems have been visualized experimentally and numerically by
Kriesels et al. [68] and Dequand et al. [36].
Upgrading of industrial waste heat
Another important potential application for thermoacoustics is the upgrading of indus-
trial waste heat. Huge amounts of heat produced by industry remain unused because
of small power outputs or temperatures that are too small. The Energy research Centre
of the Netherlands (ECN) has developed a thermoacoustic system that uses part of the
waste heat to power a prime mover that drives a heat pump to upgrade the temperature
of the remainder. The apparatus is shown in gure 1.10.
Prime Mover
Heat Pump
Resonator
Figure 1.10: Upgrading of industrial waste heat using a combination of a prime mover and heat
pump. Part of the waste heat is used to power the prime mover, which generates acoustic power
to drive the heat pump and heat the remaining part of the waste heat.
Thermoacoustic cryocooling
Thermoacoustics is the only technology that can cool to temperatures close to the abso-
lute zero without using moving parts and is therefore very interesting for applications
requiring crycooling. One such application is the liquefaction of natural gases which
requires very low temperatures. At the Los Alamos National Laboratory (LANL) a
heat-driven thermoacoustic refrigeration system [134, 138] has been designed capable
of liquefying natural gases. Their system, depicted in gure 1.11, uses a toroidal geom-
etry attached to a long resonator tube, with a prime mover located in the toroidal part
and a refrigerator located near the end of the resonator. Part of the natural gas is burned
to supply heat which is converted into acoustic power by the prime mover. The acoustic
power is then provided to the refrigerator and subsequently used to cool the remainder
of the natural gas until it is liqueed.
Thermoacoustic cyrocooling is also applied to the cooling of electronics. The Amer-
ican Navy used a Shipboard Electronics ThermoAcoustic Chiller (SETAC) to cool elec-
tronics on board of one of their destroyers [86]. A similar application found its way into
12 1.5 Thesis overview
Prime
Mover
Refrigerator
Figure 1.11: Schematic drawing of a heat-driven thermoacoustic refrigeration system. By burn-
ing part of the natural gases at the prime mover, the remainder can be cooled to liquefaction at
the refrigerator.
spacecraft, when in 1992 the Space ThermoAcoustic Refrigerator (STAR) was launched
on the Space Shuttle Discovery. It was the answer [46] to the need for reliable, com-
pact, and long-lived spacecraft cryocooling for the cooling of sensors aboard the shut-
tle. Other applications of thermoacoustics within spacecraft concern the development
of thermoacoustic systems suitable for electricity generation on space missions [16, 140].
Food refrigeration and airconditioning
Thermoacoustics refrigerators can also be used to replace conventional food refriger-
ators or airconditioning, without the harmful polluting side-effects. One well-known
example is the collaboration [101] between Pennsylvania State University and Ben and
Jerrys Homemade Ice Cream, that led to the development of a thermoacoustic in-store
ice-cream cabinet, capable of keeping ice cream at -18
C. The aim was to nd a cost-
competitive and reliable alternative to the use of polluting refrigerants and thereby re-
duce the emission of global-warming gases.
Cooking stove
Recently the SCORE (Stove for Cooking, Refrigeration and Electricity) project has started,
an international research program led by the University of Nottingham [112]. The aim
is to develop a biomass-powered thermoacoustic system, to be used as an affordable,
safe, and efcient alternative for the energy needs of third-world countries. Current
sources of energy, like open res, are highly inefcient and can produce serious health
hazards. The SCORE stove will serve as a versatile domestic appliance, being a cooker,
a refrigerator, and an electricity regenerator all in one.
1.5 Thesis overview
In this thesis we will derive a weakly nonlinear theory of thermoacoustics, applicable
to wide and narrow pores with arbitrarily shaped cross-sections that may vary slowly
in axial direction. We will use dimensional analysis and small-parameter asymptotics
so that (quadratically) nonlinear terms can be systematically included. The use of a
dimensionless framework has two main advantages:
Introduction 13
Nondimensionalization allows us to analyze limiting situations in which param-
eters differ in orders of magnitude, so that we can study the system as a function
of dimensionless parameters connected to geometry, heat transport, and viscous
effects.
We can give explicit conditions under which the theory is valid. Furthermore, we
can clarify under which conditions additional assumptions or approximations are
justied.
In the end we will apply this theory to model, analyze, and simulate both standing-
wave and traveling-wave devices and we will show how this approach can be used as
an aid for optimizing their design.
The main ingredients of this thesis are therefore the choice of geometry for the stack
pores, the use of dimensionless parameters, the inclusion of quadratic nonlinearities,
and the modeling and numerical simulation of complete devices. In Section 1.6 we will
discuss briey the relevant literature on each of these topics, but rst we will give a
chapter-by-chapter overview of the contents of this thesis.
In Chapter 2 the thermodynamics of thermoacoustics will be discussed and a mea-
sure for the thermodynamic performance is introduced. Then in Chapter 3 we will give
the governing equations and we will set the mathematical framework for our small-
parameter asymptotics. Chapter 4 is concerned with the systematic development of the
theory of thermoacoustics in slowly-varying two-dimensional pores. We will show how
the leading-order, rst-order, and second-order terms with respect to the acoustic Mach
number can be derived, which includes the derivation of the second harmonics and
the streaming terms. We will also show how under certain simplifying assumptions
analytic expressions can be obtained. In Chapter 5 the results from Chapter 4 will be
generalized to arbitrary three-dimensional slowly-varying pores. Next in Chapter 6 the
thermoacoustic equations are implemented and validated experimentally for several
types of standing-wave devices: a thermoacoustic couple, a thermoacoustic refrigera-
tor, and a thermoacoustic prime mover. We will show how the performance is affected
by the operating conditions and parameters connected to geometry, stack material, and
working gas. Finally we will also show what kind of streaming velocity proles can
occur. In Chapter 7 a specic type of traveling-wave prime mover is modeled and im-
plemented numerically. An optimization routine is developed that for given system
parameters computes the ideal geometry. Moreover, we we will show how the perfor-
mance is affected by variation of various parameters. Then in Chapter 8 an evolution
equation will be derived that predicts the development of shock waves near resonance,
both in a closed tube and in interaction with a thermoacoustic stack. Lastly, in Chapter
9 we give some conclusions, discuss our results, and give some suggestions for future
work.
1.6 Literature review
While Rotts theory of thermoacoustics [91,115121] was still limited to two-dimensional
pores or three-dimensional cylindrical pores, it was Arnott et al. [5] who rst extended
Rotts theory to arbitrary three-dimensional cross-sections, although nonlinear terms
were not yet included. We have extended their results by allowing a slow variation in
14 1.6 Literature review
the pore cross-section in axial direction. Furthermore, we also allow temperature de-
pendence of speed of sound, specic heat, viscosity, and thermal conductivity, and we
have eliminated the restriction of steady pore-wall temperature. Additionally we have
also incorporated quadratic nonlinearities such as the second harmonics and streaming
terms into the analysis.
There are numerous articles that have analyzed more specic choices for the stack
pore geometry, shown in gure 1.12. The parallel-plate geometry has been investigated
most extensively, in particular by Swift [131] and Rott [115], who also investigated cylin-
drical cross-sections. Stinson [128] and Roh et al. [113] derived simultaneously expres-
sions for rectangular cross-sections and Stinson and Champoux [129] used results of
Han [53] to solve the equations for triangular cross-sections. Lastly, we mention Swift
and Keolian [136] who calculated the thermoacoustic behavior for so-called pin-array
stacks, consisting of a hexagonal array of pins aligned in axial direction.
(a) Parallel plates (b) Circular (c) Rectangular (d) Triangular (e) Pin array
Figure 1.12: Possible stack pore cross-sections.
Previous treatments with variable cross-sections have always been restricted to widely
spaced pores [98, 117], whereas in this thesis no such assumption is made. Although
variable cross-sections occur mostly within the main resonator tube, they may also occur
in the narrow stack pores. A more general formulation would allow stack geometries
other than collections of arbitrarily shaped pores. We mention Roh et al. [114], who in-
troduce tortuosity and viscous and thermal dynamic shape factors to extend single-pore
thermoacoustics to bulk porous medium thermoacoustics. Furthermore, there exists a
vast amount of papers on ow through porous media with random or stochastic prop-
erties, that could also be applied to thermoacoustic congurations. Auriault [13] gives
a clear overview of various techniques that can be used:
Statistical modeling [69];
Self-consistent models [157];
Volume-averaging techniques [103];
Method of homogenization for periodic structures [12].
In addition Auriault [13] gives a short explanation of how the method of homogeniza-
tion can be applied to analyze heat and mass transfer in composite materials. A detailed
discussion of methods and results from the theory of homogenization and their appli-
cations to ow and transport in porous media can be found in [58]. Another approach
is demonstrated by Kaminski [63], who combines the homogenization approach with
a stochastic description of the physical parameters to analyze viscous incompressible
ow with heat transfer.
Introduction 15
In our analysis, we assume a steady-state situation in which the variables oscillate
at (integer multiples of) the fundamental frequency (cf. [5, 119, 131]), which is not al-
ways the case. Prime movers require a sufciently high temperature difference before it
goes into self-oscillation. Atchley et al. have given a standing-wave analysis of this phe-
nomenon and measured the complete evolution of the quality factor of a prime mover
from below, through, and above onset of self-oscillation [69].
The use of a dimensionless framework is not very wide-spread. Olson and Swift [97]
use dimensionless parameters to analyze thermoacoustic devices, but without trying to
construct a complete theory of thermoacoustics. Instead dimensionless numbers are
used to reduce the number of independent parameters in their experiments and for
scaling purposes.
There have been many observations [14, 100, 132] demonstrating that at high am-
plitudes measurements deviate signicantly from predictions by linear theory. Stream-
ing, turbulence, transition effects, higher harmonics, and shock waves are mentioned as
main causes for these deviations. Streaming [75, 95] refers to a steady mass-ux density
or velocity, usually of second order, that is superimposed on the larger rst-order oscil-
lations. With the addition of a steady non-zero mean velocity, the gas moves through
the tube in a repetitive 102 steps forward, 98 steps backward manner as described
by Swift [135]. Streaming is important as a nonzero mass ux can seriously affect the
performance of thermoacoustic devices. It can cause convective heat transfer, which
can be a loss, but it can also be essential to transfer heat to and from the environment.
Backhaus and Swift [14], in their analysis of a traveling-wave heat prime mover, show
how streaming can cause signicant degradation of the efciency.
The concept of mass streaming has been studied by many authors, (see e.g. [17, 50,
52, 98, 117, 148]), but restricted to simple geometries such as straight two-dimensional or
cylindrical pores, although Olson and Swift [98] do allow slowly varying cross-sections
in the tube. Moreover, they show that variable cross-sections can occur in practical
geometries and can be used to suppress streaming; a suitable asymmetry in the tube
can cause counter-streaming that balances the existing streaming in the tube. Bailliet
et al. [17], Rott [117], and Olson and Swift [98] also take into account the temperature
dependence of viscosity and thermal conductivity, although the latter two only consider
widely spaced pores.
Higher harmonics oscillate at integer multiples of the fundamental frequency, and
can become quite important at high amplitudes. Atchley and Bass [10], noticed exper-
imentally that the generation of higher harmonics can cause highly nonlinear wave-
forms that degrade the performance signicantly. The impact of the harmonics is great-
est when excited near resonance, but Atchley and Gaitan [43] analyzed that this can
be suppressed by careful tuning of the resonator. There is no literature that systemat-
ically includes the higher harmonics into the analysis, which Swift [135] describes as
a formidable challenge and Rott [118] as a hopeless undertaking. Although a com-
plete extension would require going up to fourth order in the asymptotic expansion,
we have shown here that the second-harmonic pressure and velocity oscillations can be
expressed in terms of the rst-harmonic oscillations.
It has been noticed that higher harmonics can interact together to form shock waves
[59, 60]. Neglecting the nonlinear sound eld in the stack, Gusev [49] analyzed shock
formations using a nonlinear evolution equation. Modeling the stack by a reection
coefcient, we will derive a new evolution equation that predicts the development of
16 1.6 Literature review
shock waves when the tube is excited near resonance.
Turbulence arises at high Reynolds numbers, where the assumption of laminar ow
is no longer valid. It disrupts boundary layers and can negatively affect the heat trans-
fer. Turbulence may also arise due to abrupt changes in the shape or direction of the
channels, which leads to the shedding of vortices [2, 89, 158] and can cause signicant
losses. Swift [44, 135] gave some suggestions on how to include turbulence into the
modeling, but they are by no means complete. It is therefore still a challenge to include
systematically the effects of turbulence into the analysis.
Finally we note that there is a long list of publications on the numerical simulation of
heat-driven and sound-driven thermoacoustic devices, focusing on both standing-wave
and traveling-wave modes of operation. This list is too long to go into here, but it should
be mentioned that a large part of the thermoacoustic community uses the DeltaEC (or
DeltaE) code [146, 147] which was developed at the Los Alamos National Laboratory
based on Swifts linear theory of thermoacoustics [135].
Chapter 2
Thermodynamics
In this chapter we will explain the basic thermodynamics concepts that are at the basis
of thermoacoustics. We will start by giving the fundamental laws of thermodynam-
ics and show how they can be used to derive a thermodynamic efciency and coefcient
of performance that indicate how well a thermoacoustic prime mover or refrigerator per-
form. Next we will shed some more light on the mechanisms behind the thermoacoustic
production of sound or heat by analyzing the thermodynamic cycle a gas parcel experi-
ences.
2.1 Laws of thermodynamics
Thermodynamically speaking a thermoacoustic system is completely characterized by
the ows of heat and work, as shown in gure 2.1. Let T
H
be the temperature of a hot
reservoir and T
C
the temperature of a cold reservoir. In a refrigerator acoustic work W is
used to generate a heat ow against the temperature gradient, removing heat Q
C
at the
low temperature and releasing heat Q
H
at the high temperature. In a prime mover work
W is produced by transporting heat from the high to the low temperature, removing
heat Q
H
at the high temperature and releasing heat Q
C
at the low temperature.
The energy ows within a thermoacoustic system are governed by the rst and sec-
ond law of thermodynamics. The rst law concerns the conservation of energy and
describes the rate of change of the internal energy
U of a system with volume V, the
heat and enthalpy ows into the system, and the work done by the system [35]:
U =
Q +
nH
m
p
V + P. (2.1)
Here n represents the molar ow rate entering the system, H
m
represents molar en-
thalpy,
Q represents heat power, and P represents other forms of power done on the
system. The summation is used to account for all the different sources of sound and
mass that are in contact with the system and plus and minus signs are used to indicate
ows into or out of the system, respectively.
The second law of thermodynamics states that any process that occurs will tend to
increase the total entropy of the system. Mathematically this can be expressed by the
18 2.1 Laws of thermodynamics
Refrigerator
T
H
T
C
Q
H
W
Q
C
(a) Refrigerator or heat pump
Prime mover
T
H
T
C
Q
H
W
Q
C
(b) Prime mover
Figure 2.1: The ows of work W and heat Q inside (a) a thermoacoustic refrigerator or heat
pump and (b) a thermoacoustic prime mover. The arrows are used to indicate the exchange of
heat and work between the thermoacoustic system and the environment.
inequality
S
i
0, (2.2)
where
S
i
represents the entropy production in the system. The second law can also be
formulated using an equality [35],
S =
Q
T
+
nS
m
+
S
i
. (2.3)
It states that the rate of change of entropy
S of a thermodynamic system is equal to
the sum of the entropy change due to heat ows
Q with temperature T, due to mass
ows nS
m
, and due to the irreversible entropy production in the system
S
i
. Again the
summation signs are used to allow for a multitude of sound or mass sources.
In the thermoacoustic systems considered there is no mass ow into or out of the
system, the volume of the system is constant, and the only work performed on the
system is the acoustic work W. As a result, we nd that the laws of thermodynamics
reduce to
U =
_
Q
C
Q
H
+
W, for a refrigerator or heat pump,
Q
C
+
Q
H
W, for a prime mover,
(2.4)
and
s =
_
Q
C
T
C
Q
H
T
H
+
S
i
, for a refrigerator or heat pump,
Q
C
T
C
+
Q
H
T
H
+
S
i
, for a prime mover.
(2.5)
In our analysis we consider a (time-averaged) steady-state situation, so that we can put
U = 0 and
S = 0. It follows that
Q
C
Q
H
+
W = 0, (2.6)
Thermodynamics 19
for all thermoacoustic devices. In addition, since the entropy generated by the system
S
i
0, we nd
Q
C
T
C
Q
H
T
H
, for a refrigerator or heat pump, (2.7)
Q
C
T
C
Q
H
T
H
, for a prime mover, (2.8)
where equality can only be reached in the ideal situation when there are no irreversible
processes.
2.2 Thermodynamic performance
2.2.1 Refrigerator or heat pump
The performance of a refrigerator or heat pump is measured by the so-called coefcient
of performance COP. Since a refrigerator and a heat pump each have a different goal,
cooling versus heating, the coefcients of performance are dened differently also.
When analyzing a refrigerator we are interested in maximizing the cooling power
Q
C
extracted at temperature T
C
, while at the same time minimizing the net required
acoustic power
W. On the other hand, a heat pump aims at maximizing the heating
power
Q
H
at temperature T
H
, while minimizing
W. Therefore, the coefcients of per-
formance COP
re f
(refrigerator) and COP
hp
(heat pump) are dened as the ratios of these
quantities,
COP
re f
:=
Q
C
W
, (2.9)
COP
hp
:=
Q
H
W
. (2.10)
The second law of thermodynamics limits the interchange of heat and work. In
particular it follows from (2.6) and (2.7) that
COP
re f
=
Q
C
Q
H
Q
C
T
C
T
H
T
C
=: COPC
re f
, (2.11)
COP
hp
=
Q
H
Q
H
Q
C
T
H
T
H
T
C
=: COPC
hp
. (2.12)
The quantity COPC is called the Carnot coefcient of performance , and gives the max-
imal performance for all refrigerators or heat pumps. Using COPC we can introduce a
relative coefcient of performance COPR as
COPR :=
COP
COPC
. (2.13)
Note that although COP and COPC may attain any nonnegative value, the relative co-
efcient COPR will always be between 0 and 1.
20 2.3 The thermodynamic cycle
2.2.2 Prime mover
The performance of a prime mover is measured by the so-called efciency . A prime
mover uses heating power
Q
H
to produce as much acoustic power
W as possible and
thus the efciency is dened as
=:
Q
H
. (2.14)
Using equation (2.6), we can write
=
Q
H
Q
C
Q
H
. (2.15)
Applying equation (2.8), we obtain
T
H
T
C
T
H
= 1
T
C
T
H
=:
C
. (2.16)
By denition both the efciency and the Carnot efciency
C
are between zero and
one. The same holds for the relative efciency
R
which is dened as
R
:=
C
. (2.17)
Of course the efciency is not the only criterion for a good thermoacoustic prime
mover. For certain applications one might be primarily interested in maximizing the
power output with the efciency only of minor interest. Other competing criteria can
be cost, size, reliability, available materials, safety, and the complexity of the design.
Naturally, the same holds for a refrigerator or heat pump.
2.3 The thermodynamic cycle
In Section 1.2 we gave an intuitive explanation for the basic mechanism of thermoa-
coustics. In this section we will give a more detailed analysis, describing all the steps a
uid parcel undergoes while it oscillates in a narrow pore. In particular we will discuss
the time phasing of the thermodynamic effect and its relation to the pore size, based
on the analysis of Swift [131] and Ceperley [23]. Swift showed that for standing-wave
devices the uid-parcel movements are very accurately described by the Brayton cy-
cle [21]. Ceperley suggested to design thermoacoustic devices such that the thermody-
namic cycle would match the ideal Stirling cycle [145] to reduce irreversible effects to
a minimum. Liang [73] analyzed Ceperleys concepts further using a sinusoidal model
that describes the thermodynamic cycles of gas parcels oscillating in a regenerator.
2.3.1 Standing-wave phasing
Suppose gas parcels oscillate with standing-wave phasing at a distance y from a solid
plate supporting a temperature gradient. As shown in gure 2.2 the parcels will ex-
perience a build-up of pressure (compression) and drop of pressure (expansion) while
Thermodynamics 21
A B C D A
t
..
compression
displacement
..
expansion
displacement
Figure 2.2: Velocity (-) and pressure ( ) as a function of time in a gas supporting a
standing wave. The cycle consists of a compression/displacement step (A-B) and an expan-
sion/displacement step (C-D). Depending on the distance between the gas and the solid heating
and cooling may occur as well.
undergoing displacement. Depending on the size of y relative the thermal penetration
depth
k
, heat transfer may occur as well. We consider three cases:
No thermal contact (y
k
)
When there is no thermal contact between the gas and the plate the gas parcels
will expand and compress adiabatically and reversibly and no heat transfer will
take place.
Perfect thermal contact (y
k
)
In the rst step the gas parcels are compressed and displaced towards the hot end
of the plate and the parcel. At the same time the parcels will be heated if a large
temperature gradient is imposed (prime mover) and cooled if a small temperature
gradient is imposed (refrigerator). Because there is perfect thermal contact the
compression and heat exchange will take place simultaneously. In the next step
the gas parcels are displaced back towards the cold end and the reverse effect takes
place. The parcels will be cooled for a prime mover and heated for a refrigerator.
Imperfect thermal contact (y
k
)
Because of the distance between the gas and the plate, there is a time delay be-
tween motion and heat transfer. As a result the gas parcels execute a four-step
cycle. In case of a refrigerator the parcels are compressed and displaced (A-B),
cooled (B-C), expanded and displaced back (C-D), and heated (D-A). In case of a
prime mover the heating and cooling steps are interchanged.
The acoustic power produced or absorbed by a gas parcel can be found from the
area
_
p dV in the pressure-volume diagrams. In gure 2.3 we see that heat can only be
converted in acoustic power or vice versa if there is a time delay between the compres-
sion or expansion and the heat exchange. This thermodynamic cycle is what is known
as the idealized Brayton cycle. This is the reason why in standing-wave based devices
22 2.3 The thermodynamic cycle
volume
p
r
e
s
s
u
r
e
y
k
volume
p
r
e
s
s
u
r
e
y
k
volume
p
r
e
s
s
u
r
e
y
k
A
B C
D
(a) prime mover
volume
p
r
e
s
s
u
r
e
y
k
volume
p
r
e
s
s
u
r
e
y
k
volume
p
r
e
s
s
u
r
e
y
k
D
C B
A
(b) refrigerator
Figure 2.3: Schematic pressure-volume cycle executed by the gas parcel in (a) a standing-wave
prime mover and (b) a standing-wave refrigerator. Only when the gas parcels are about a thermal
penetration depth away from the plate, pressure and volume variations are out of phase and net
work is performed.
stacks are used with stack pores that have radii of several penetration depths. The poor
thermal contact is crucial for the thermoacoustic effect to occur, but it also gives rise to
irreversible heat transfer and friction, which has a negative effect on the efciency. We
will show below that in traveling-wave devices we can have perfect thermal contact and
thus potentially higher efciencies.
2.3.2 Traveling-wave phasing
Suppose now the gas parcels oscillate with traveling-wave phasing at a distance y
k
from a solid plate supporting a temperature gradient. As shown in gure 2.4 the parcels
will undergo a cycle consisting of four steps:
A-B First the gas parcel is compressed at constant temperature.
B-C Then the parcel is displaced towards the hot end at constant volume and simulta-
neously it is heated (prime mover) or cooled (refrigerator).
C-D Next the parcel is expanded at constant temperature.
Thermodynamics 23
A B C D A
t
..
compression
..
expansion
. .
cooling/heating
displacement
. .
heating/cooling
displacement
Figure 2.4: Velocity (-) and pressure ( ) as a function of time in a gas supporting a trav-
eling wave in perfect contact with the solid. The gas undergoes a Stirling cycle of compression,
cooling/heating, expansion, and heating/cooling.
D-A Finally, the parcel is displaced back towards the cold end at constant volume and
simultaneously it is cooled (prime mover) or heated (refrigerator).
Note that there is a continuous exchange of heat between the gas and the solid during
the displacement steps.
The acoustic power produced or absorbed by the gas parcel can be found from the
area
_
p dV in the pressure-volume diagrams. In gure 2.5 we see that heat is con-
verted into acoustic power and vice versa, even though y
k
(cf. gure 2.3). This
thermodynamic cycle is what is known as the idealized Stirling cycle.
volume
p
r
e
s
s
u
r
e
y
k
D
C
B
A
(a) refrigerator
volume
p
r
e
s
s
u
r
e
y
k
A
B
C
D
(b) prime mover
Figure 2.5: Schematic pressure-volume cycle executed by the gas parcel in (a) a traveling-wave
refrigerator and (b) a traveling-wave prime mover at perfect thermal contact with the wall. Only
when the gas parcels are about a thermal penetration depth away from the plate, pressure and
volume variations are out of phase and net work is performed.
24 2.3 The thermodynamic cycle
This is the reason why in traveling-wave based devices regenerators can be used
that have perfect thermal contact between gas and solid. As there is no irreversible heat
transfer much higher efciencies can be obtained. It should be mentioned that because
of the very narrow pores, large viscous losses may occur, which is why traveling-wave
devices are usually designed such that in the regenerator the velocities are small.
In gure 2.6 we have summarized the (idealized) four-step cycles the uid parcels
undergo as they oscillate along the walls of the stack pores of a standing-wave prime
mover or refrigerator and the regenerator pores of a traveling-wave prime mover or
refrigerator.
1 - Compression
2 - Cooling
Q
1
W
1
3 - Expansion
4 - Heating
Q
2
W
2
(a) Standing-wave re-
frigerator
1 - Compression
2 - Heating
Q
1
W
1
3 - Expansion
4 - Cooling
Q
2
W
2
(b) Standing-wave tx
prime mover
1 - Compression
2 - Cooling
Q
1
W
1
3 - Expansion
4 - Heating
Q
2
W
2
(c) Traveling-wave re-
frigerator
1 - Compression
2 - Heating
Q
1
W
1
3 - Expansion
4 - Cooling
Q
2
W
2
(d) Traveling-wave tx
prime mover
Figure 2.6: Typical uid parcels, near a stack plate, executing the four steps (1-4) of the thermo-
dynamic cycle in (a) a stack-based standing-wave refrigerator, (b) a stack-based standing-wave
prime mover, (c) a regenerator-based traveling-wave refrigerator and (d) a regenerator-based
traveling-wave prime mover.
Thermodynamics 25
2.3.3 Bucket-brigade effect
Usually the displacement of one uid parcel is small with respect to the length of the
plate. Thus there will be an entire train of adjacent uid parcels, each conned to a short
region of length 2x and passing on heat as in a bucket brigade (gure 2.7). Although
a single parcel transports heat
Q over a very small interval,
Q is shuttled along the
entire plate because there are many parcels in series.
Q
C
Q
H
T
C
T
H
x
Q
. .
W
Figure 2.7: Work and heat ows inside a thermoacoustic refrigerator. The oscillating uid
parcels work as a bucket brigade, shuttling heat along the stack plate from one parcel of gas to
the next. As a result heat is transported from the left to the right, requiring acoustic power
W.
Inside a prime mover the arrows will be reversed, i.e. heat is transported from the right to the left
and acoustic power
W is produced.
26 2.3 The thermodynamic cycle
Chapter 3
Modeling
3.1 Geometry
As mentioned in the introduction we consider devices of the form shown in gure
3.1. The porous medium is modeled as a collection of narrow arbitrarily shaped pores
aligned in the direction of sound propagation as shown in Fig. 3.2. Furthermore, we
allow the pore boundary to vary slowly (with respect to the channel radius) in the di-
rection of sound propagation, as shown in gure 3.2(b). For the analysis here we focus
on what happens inside one narrow channel, which can represent a stack pore, but also
the main resonator tube.
(a) straight duct (b) looped duct
Figure 3.1: Schematic view of two possible duct congurations: straight or looped.
In our analysis of the thermoacoustic effect we restrict ourselves to a pore and its
neighboring solid, where the system (x, r, ) forms a cylindrical coordinate system. Let
/
g
(x) denote the gas cross-section and /
s
(x) the half-solid cross-section at position x.
Let
g
denote the gas-solid interface and
t
the outer boundary of the half-solid. We
choose
t
and /
s
such that there is no heat ux through
t
(for periodic structures
t
is
the centerline of the solid). The remaining stack pores and solid can then be modeled
28 3.2 Governing equations
by periodicity. On
g
we write
o
g
(x, r, ) := r 1
g
(x, ) = 0,
with 1
g
(x, ) the distance of
g
to the pore centerline at position x and angle . Similarly
on
t
we write
o
t
(x, r, ) := r 1
t
(x, ) = 0,
where 1
t
(x, ) := 1
g
(x, ) +1
s
(x, ) denotes the distance of
t
to the origin at position
x and angle .
(a) transverse cut of stack
solid
gas
r
x
1
g
(x, )
1
s
(x, )
t
(b) longitudinal cut of one stack pore
Figure 3.2: Porous medium modelled as a collection of arbitrarily shaped pores.
3.2 Governing equations
The general equations describing the thermodynamic behavior in the gas are the well-
known conservation laws of mass, momentum and energy [85]. Introducing the con-
vective derivative
df
dt
=
f
t
+v f ,
these equations can be written in the following form:
mass :
d
dt
= v, (3.1)
momentum :
dv
dt
= p + +b, (3.2)
energy:
d
dt
= q p v +:v. (3.3)
Here is the density, v the velocity vector, p the pressure, b the body forces (gravity),
q the heat ux, the specic internal energy, and the viscous stress tensor. For q and
Modeling 29
we have the following relations
Fouriers heat ux model: q = KT, (3.4)
Newtons viscous stress tensor: = 2T +( v)1, (3.5)
where T the absolute temperature, K is the thermal conductivity, T =
1
2
(v + (v)
T
)
the strain rate tensor, and and the dynamic (shear) and second viscosity.
In general the viscosity and thermal conductivity will depend on temperature. For
example, Sutherlands formula [74] can be used to model the dynamic viscosity as a
function of the temperature
=
re f
1 + S
u
/T
re f
1 + S
u
/T
_
T
T
re f
_
1/2
,
where
re f
is the value of the dynamic viscosity at reference temperature T
re f
and S
u
is Sutherlands constant. According to [26] the variation of thermal conductivity is ap-
proximately the same as the variation of the viscosity coefcient. The thermodynamic
parameters C
p
, C
v
, , and c may also depend on temperature (see Appendix A). The
temperature dependence of and K is particularly important, as it allows investigation
of Rayleigh streaming: forced convection as a result of viscous and thermal boundary-
layer phenomena.
As shown in Appendix B.2 (eq. (B.9)), the equations above can be combined and
rewritten to yield the following equation
1
for the temperature in the uid
C
p
_
T
t
+v T
_
= T
_
p
t
+v p
_
+ (KT) +:v, (3.6)
where C
p
is the isobaric specic heat and the volumetric expansion coefcient as de-
ned in Appendix A.
In the solid we only need an equation for the temperature. We have that the temper-
ature T
s
in the solid satises the diffusion equation
s
C
s
T
s
t
= (K
s
T
s
) , (3.7)
where K
s
, C
s
and
s
are the thermal conductivity, the isobaric specic heat and the den-
sity of the solid, respectively.
Another useful equation, that can replace (3.3), describes the conservation of energy
in the following way:
t
_
1
2
[v[
2
+
_
=
_
v
_
1
2
[v[
2
+h
_
KT v
_
+v b, (3.8)
where h is the specic enthalpy. The details of the derivation leading to this equation
can be found in Appendix B.1.
The equations (3.1), (3.2), (3.6), and (3.7) can be used to determine v, p, T, and T
s
.
1
The double-dot product results in a scalar: A:B =
i, j
A
i j
B
ji
.
30 3.2 Governing equations
Additionally one should add an equation of state that relates the density to the pressure
and temperature in the gas. For the analysis here it is enough to express the thermody-
namic variables , s, and h in terms of p and T using the thermodynamic equations
(A.7)-(A.10) given in Appendix A. For the numerical examples given in Chapters 6 and
7 it is necessary to make a choice and we choose to impose the ideal gas law
p = R
spec
T,
where R
spec
= C
p
C
v
is the specic gas constant. However, the analysis presented here
is also valid for non-ideal gases and nowhere will we use this relation.
To distinguish between variations along and perpendicular to sound propagation
we will use a in the index to denote the transverse vector components. For example
the transverse gradient
and transverse Laplace operator
2
are dened by
= e
x
x
+
,
2
=
2
x
2
+
2
.
The equations will be linearized and simplied using the following assumptions:
the temperature variations along the stack are much smaller than the typical ab-
solute temperature;
time-dependent variables oscillate with fundamental frequency .
At the gas-solid interface we impose the no-slip condition
v = 0 if o
g
= 0. (3.9)
The temperatures in the solid and in the gas are coupled at the gas-solid interface
g
by
continuity of temperature and heat uxes:
T = T
s
if o
g
= 0, (3.10a)
KT n = K
s
T
s
n if o
g
= 0, (3.10b)
where n is a vector outward normal to the surface. The boundary
t
, with outward
surface normal n
, is chosen such that no heat goes through, i.e.
T
s
n
= 0 if o
t
= 0. (3.11)
Note that since o
g
and o
t
are vectors normal to the surfaces we can also replace the
two ux conditions by
KT o
g
= K
s
T
s
o
g
if o
g
= 0, (3.12)
T
s
o
t
= 0 if o
t
= 0. (3.13)
Modeling 31
3.3 Scaling
To make the equations above dimensionless we apply a straightforward scaling proce-
dure. First we scale the spatial coordinate by a typical pore radius R
g
:
x = R
g
x.
Note that because we consider narrow stack pores, the typical length scale L of radius
variation is much larger than a radius. We therefore introduce the small parameter as
the ratio R
g
/L between a typical radius and this length scale. At
g
we write
o
g
(
X, r, ) = r
1
g
(X, ) = 0,
1
g
(X, ) = R
g
1
g
(x, ), X = x =
x
L
.
Similarly at
t
we have
o
t
(
X, r, ) = r
1
t
(X, ) = 0,
1
t
(X, ) = R
g
1
t
(x, ).
Our formal assumption of slow variation has now been made explicit in the slow vari-
able X. As a typical time scale we use L/c
re f
, and we scale
t =
L
c
re f
t.
Secondly, we rescale the remaining variables as well using characteristic values
u = c
re f
u, v
=c
re f
v
, p =
re f
g
(c
re f
)
2
p, =
re f
c
re f
R
g
, (3.14a)
=
re f
g
, T =
(c
re f
)
2
C
re f
p
T,
s
=
re f
s
s
, T
s
=
(c
re f
)
2
C
re f
p
T
s
, (3.14b)
h = (c
re f
)
2
h, = (c
re f
)
2
, s = C
re f
p
s, b = g
b, (3.14c)
=
C
re f
p
(c
re f
)
2
, C
p
= C
re f
p
C
p
, C
s
= C
re f
s
C
s
, c = c
re f
c, (3.14d)
K = K
re f
K, =
re f
, =
re f
. (3.14e)
Thirdly, we observe that the system contains 19 parameters, in which 6 physical dimen-
sions are involved. The Buckingham theorem [20] implies that the 19 parameters can
be combined into 13 independent dimensionless parameters. In Table 3.1 a possible
choice is presented. Here the parameters
,
k
and
s
are the viscous penetration
depths based on dynamic and second viscosity and the thermal penetration depths for
the uid and solid, respectively.
_
2
re f
re f
g
,
_
2
re f
re f
g
,
k
=
_
2K
re f
g
re f
g
C
re f
p
,
s
=
2K
re f
s
re f
s
C
re f
s
.
32 3.3 Scaling
Symbol Formula Description
C
re f
p
/C
re f
v
specic heats ratio
(c
re f
R
g
/UL)
2
2
/M
2
a
R
g
/L stack pore aspect ratio
R
s
/R
g
porosity
K
re f
s
/K
re f
g
ratio thermal conductivities
L/c
re f
Helmholtz number
B
r
R
g
/R
t
blockage ratio
D
r
p
A
/p
amb
drive ratio
M
a
U/c Mach number
F
r
U
2
/(gL) Froude number
N
L
R
g
/
k
Lautrec number uid
N
s
R
s
/
s
Lautrec number solid
P
r
2
/
2
k
Prandtl number
S
k
k
/U Strouhal number based on
k
W
o
2R
g
/
Womersley number based on
W
2R
g
/
Womersley number based on
Table 3.1: Dimensionless parameters
Note that 16 dimensionless numbers are introduced. Since at most 13 can be indepen-
dent, we have at least three dependent numbers. For example, P
r
, S
k
, and can be
expressed in the other parameters as follows
P
r
=
2N
2
L
W
2
o
, =
2
M
2
a
, S
k
=
N
L
M
a
. (3.15)
The remaining dimensionless numbers are independent and can be chosen arbitrarily.
In the analysis below we will use explicitly that M
a
1 (small velocity amplitudes)
and 1 (long pores). Other important parameters in thermoacoustics are , S
k
and
N
L
. is a Helmholtz number and is therefore a measure for the relative length of the
stack with respect to the wavelength; short stacks imply small Helmholtz numbers. In
Section 4.7.2 it is shown that S
k
is a measure for the contribution of the thermoacoustic
heat ux to the total heat ux in the stack and can be both small and large depending on
the application. As mentioned previously, the Lautrec number distinguishes between
the porous medium being a stack (N
L
1) or a regenerator (N
L
1). These limiting
cases are described schematically in Table 3.2. Note also that the gravity is present via
the Froude number F
r
. The gravitational terms only appear in the momentum equations
(3.17) and (3.18), and in the energy equation (3.22), as second or third-order term in M
a
.
Therefore, as long as the Froude number does not become too small, the gravity will
Modeling 33
N
L
M
a
S
k
1 regenerator small velocities long pores short stack
thermoacoustic heat
ow dominates
1 stack large velocities short pores long stack -
1 resonator - - -
heat conduction
dominates
Table 3.2: Parameter ranges for some important dimensionless numbers
have little effect on the thermoacoustic behaviour. It follows from the denition of the
Froude number that in large machines, or at very small velocity amplitudes, gravity can
become more important. This should be kept in mind when upscaling thermoacoustic
devices to a larger size.
From here on we will use dimensionless variables, but omit the tildes for conve-
nience. Note that
=e
x
X
+
, v = ue
x
+v
.
Substituting (3.14) into equations (3.1)-(3.3) we arrive at the following set of dimension-
less equations:
t
=
(u)
X
(v
), (3.16)
_
u
t
+ u
u
X
+ v
u
_
=
p
X
+
W
2
o
(u) +
M
2
a
F
r
b
x
+
2
X
__
W
2
o
+
W
2
_
_
u
X
+
_
_
, (3.17)
_
v
t
+ u
v
X
+v
_
=
1
p +
W
2
o
(v
) +
M
2
a
F
r
b
__
W
2
o
+
W
2
_
_
u
X
+
_
_
, (3.18)
t
+ u
X
+v
_
= p
_
u
X
+
2N
2
L
(KT) +, (3.19)
where
=
W
2
o
_
_
u
y
+
2
v
X
_
2
+
_
u
z
+
2
w
X
_
2
+
2
_
w
y
+
v
z
_
2
+2
2
_
_
u
X
_
2
+
_
v
y
_
2
+
_
w
z
_
2
__
+
2
W
2
_
u
X
+
_
2
.
34 3.4 Small-amplitude and long-pore approximation
Equations (3.16) and (3.17) show that the gravitational termb occurs as a second-order
effect in the Mach number M
a
. The equations (3.6) and (3.7) for the uid and solid
temperature transform into
C
p
_
T
t
+ u
T
X
+ v
T
_
=T
_
p
t
+ u
p
X
+ v
p
_
+
2N
2
L
(KT) +, (3.20)
s
C
s
T
s
t
=
2
2N
2
s
(K
s
T
s
) . (3.21)
Furthermore the conservation of energy (3.8) transforms into
t
_
1
2
[v[
2
+
_
=
_
v
_
1
2
[v[
2
+h
_
2N
2
L
T
W
2
o
v
_
+
M
2
a
F
r
v b.
(3.22)
Finally we have the following boundary conditions at the gas-solid interface. First
for the velocity we have
v = 0 if o
g
= 0. (3.23a)
Secondly, for the temperature we can write
T = T
s
if o
g
= 0, (3.23b)
KT o
g
=K
s
T
s
o
g
if o
g
= 0, (3.23c)
T
s
o
t
= 0 if o
t
= 0. (3.23d)
3.4 Small-amplitude and long-pore approximation
We assume a small maximal amplitude A of acoustic oscillations, i.e. the velocity, pres-
sure, density and temperature uctuations are small relative to their mean value, which
can be used to linearize the equations given above. Since all variables are dimension-
less, we can use the same A to linearize all variables, e.g. the relative pressure or velocity
amplitude. Let f be any of the uid variables (p, v, T, etc.) with stationary equilibrium
prole f
0
. Expanding f in powers of A using a Fourier series we write
f (x, t) = f
0
(x) + ARe
_
f
1
(x)e
it
_
+ A
2
f
2,0
(x) + A
2
Re
_
f
2,2
(x)e
2it
_
+ , A 1.
Furthermore, for the velocity we assume v
0
= 0. As the velocity was scaled with the
speed of sound, the obvious choice for A then becomes the acoustic Mach number M
a
,
Modeling 35
and we will therefore use the following asymptotic expansion:
f (x, t) = f
0
(x) + M
a
Re
_
f
1
(x)e
it
_
+ M
2
a
f
2,0
(x) + M
2
a
Re
_
f
2,2
(x)e
2it
_
+ ,
M
a
1. (3.24)
The rst index is used to indicate the corresponding power of M
a
, and the index behind
the comma is used to indicate the frequency of the oscillation (cf. [135]). The uid vari-
ables are built up from steady terms and harmonic modes that are integer multiples of
the fundamental frequency. We assume that only the rst harmonic f
1
is excited exter-
nally. It then follows from equation (3.26) below that the rst-order oscillations excite
the second-order uid variables by the combined effect of the second harmonic f
2,2
, that
oscillates at twice the fundamental frequency, and the steady streaming part f
2,0
. In the
next chapters we will show how both the streaming variables and the second harmonics
can be expressed in terms of the rst harmonics and the equilibrium values.
Note that for the subsequent analysis we will only use the leading-order approxima-
tion of the thermodynamic parameters c, , C
p
, and C
v
. Their indices will therefore be
omitted.
Additionally, since we also assume 1, we may expand the perturbation variables
f
i
again to include powers of as well. However this would lead to messy derivations.
Instead we will assume that M
a
, so that the geometric and streaming effect can be
included at the same order. In the end, when all the analysis has been performed, one
can still consider the limits M
a
or M
a
and neglect certain terms.
We will use an overbar to indicate time-averaging and brackets to indicate transverse
averaging in the gas or solid, i.e.
f (x) =
2
_
2/
0
f (x, t) dt,
f )(X, t) =
1
A
g
(X)
_
/
g
(X)
f (x, t) dA, f )
s
(X, t) =
1
A
s
(X)
_
/
s
(X)
f (x, t) dA,
where A
g
and A
s
are the cross-sectional area at position X of the gas and solid, respec-
tively. The time-average of a harmonic variable always yields zero, since Re[ae
jit
] 0,
for any j N, a C. However the time-average of the product of two harmonic vari-
ables is in general not equal to zero, as
Re
_
f
1
e
it
_
Re
_
g
1
e
it
_
=
1
2
Re [ f
1
g
1
] =
1
2
Re [ f
1
g
1
] . (3.25)
Here the superscript denotes complex conjugation. In addition we can show that
the product of two harmonic variables yields a second harmonic plus the constant time-
averaged term from (3.25)
Re
_
f
1
e
it
_
Re
_
g
1
e
it
_
=
1
2
Re
_
f
1
g
1
e
2it
_
+
1
2
Re [ f
1
g
1
] . (3.26)
From this equation it follows that the rst-order acoustics can only excite second har-
monics and steady terms, unless externally excited. This motivates why we only in-
36 3.4 Small-amplitude and long-pore approximation
cluded f
2,0
and f
2,2
as second-order terms in the expansion (3.24).
Chapter 4
Thermoacoustics in
two-dimensional pores with
slowly varying cross-section
For certain types of geometries it sufces to use a two-dimensional representation. Specif-
ically we will consider narrowtwo-dimensional pores with slowly varying cross-sections
as shown in gure 4.1, where we use plus-superscripts to denote parameters and vari-
ables in the upper plane and minus-superscripts in the bottom plane. In particular 1
+
g
and 1
g
give the distances between the centerline and the top plate and bottom plate,
respectively, and 1
+
s
and 1
s
denote the thicknesses of the top and bottom plate, re-
spectively. Additionally we dene
1
g
:=
1
+
g
+1
g
2
, 1
s
:=
1
+
s
+1
s
2
1
+
t
:= 1
+
g
+1
+
s
, 1
t
:= 1
g
+1
s
.
Two dimensional pores can be used to model a geometry where the three-dimensional
pore arises from an extension of a two-dimensional channel into the third-coordinate di-
rection. The most common example is the parallel-plate stack, consisting of various par-
allel plates stacked on top of each other. Moreover, often a two-dimensional model can
describe in good approximation the behavior of a more complicated three-dimensional
shape.
Due to the assumption of slow variation we will be able to treat the axial varia-
tion separately from the transverse variation. In particular we will determine the X-
dependence of the variables as solvability conditions for the (higher-order) y-dependence.
The method adopted here is also referred to as the method of slow variation [85, 143].
38 4.1 Governing equations
y
X
1
+
g
1
+
g
+
t
t
Figure 4.1: Three-dimensional plates as an extension of a narrow two-dimensional channel with
slowly varying cross-section. At position X = x, the plate separation is given by 21
g
(X) :=
1
+
g
(X) +1
g
(X) and the cross-sectional area of the gas is given by A
g
(X) = 21
g
(X).
4.1 Governing equations
In two dimensions the equations (3.16)-(3.22) simplify into
t
+
(u)
X
+
(v)
y
= 0, (4.1)
_
u
t
+ u
u
X
+ v
u
y
_
=
p
X
+
W
2
o
_
2
X
_
u
X
_
+
y
_
u
y
__
+
M
2
a
F
r
b
x
+
2
X
__
W
2
o
+
W
2
_
_
u
X
+
v
y
_
_
, (4.2)
_
v
t
+ u
v
X
+ v
v
y
_
=
1
2
p
y
+
W
2
o
_
2
X
_
v
X
_
+
y
_
v
y
__
+
M
2
a
F
r
b
y
+
y
__
W
2
o
+
W
2
_
_
u
X
+
v
y
_
_
, (4.3)
C
p
_
T
t
+ u
T
X
+ v
T
y
_
=T
_
p
t
+ u
p
X
+ v
p
y
_
+
2N
2
L
_
2
X
_
K
T
X
_
+
y
_
K
T
y
__
+, (4.4)
s
C
s
T
s
t
=
2
2N
2
s
_
2
X
_
K
T
s
X
_
+
y
_
K
T
s
y
__
, (4.5)
Thermoacoustics in two-dimensional pores with variable cross-section 39
t
_
1
2
([u[
2
+
2
[v[
2
) +
_
=
X
_
1
2
u([u[
2
+
2
[v[
2
) +uh
2
K
2N
2
L
T
X
_
y
_
1
2
v([u[
2
+
2
[v[
2
) +vh
K
2N
2
L
T
y
W
2
o
u
u
y
_
+ T +
M
2
a
F
r
v b, (4.6)
where
=
W
2
o
_
_
u
y
+
2
v
X
_
2
+ 2
2
_
_
u
X
_
2
+
_
v
y
_
2
__
+
2
W
2
_
u
X
+
v
y
_
2
,
T =
2
W
2
o
_
u
u
X
+
2
v
v
X
+v u
_
+
W
2
u v
W
2
o
_
v
v
y
+ v v
_
+
W
2
v v
_
_
.
The boundary conditions (3.23) reduce to
v = 0 if y = 1
g
, (4.7a)
T = T
s
if y = 1
g
, (4.7b)
K
T
y
K
s
T
s
y
=
2
1
g
X
_
K
T
X
K
s
T
s
X
_
if y = 1
g
, (4.7c)
K
s
T
s
y
=
2
K
s
1
t
X
T
s
X
if y = 1
t
. (4.7d)
4.2 Acoustics
In this section we will derive two ordinary differential equations in X, with coefcients
depending on T
0
, for the acoustic pressure p
1
and the averaged acoustic velocity u
1
).
Moreover, it will be shown that p
0
is constant and that p
1
is independent of y. Finally,
explicit expressions will be derived, expressing u
1
, v
1
, T
1
, and
1
in terms of T
0
, p
1
, and
u
1
).
We start from the momentum equation in which we relate to M
a
by putting
2
=
M
2
a
(see equation (3.15)). Expanding the variables in powers of M
a
according to (3.24),
substituting the expansions into the y-component of the momentum equation (4.3), and
keeping terms up to rst order in M
a
we nd
p
0
y
+ M
a
p
1
y
= o(M
a
).
This equation should be valid for any M
a
1. Therefore, the coefcients of M
0
a
and
M
1
a
are equal to zero, so we nd that p
0
/y = p
1
/y = 0, so that p
0
and p
1
are
independent of y.
In the same way it can be shown that T
0
does not depend on y either. Collecting the
40 4.2 Acoustics
leading-order terms from the temperature equations (4.4) and (4.5), we nd
y
_
K
0
T
0
y
_
= 0,
y
_
K
s
0
T
s
0
y
_
= 0.
The only solution, satisfying the boundary conditions given in (3.23), is given by T
s
0
=
T
0
= T
0
(X). As a result
0
,
s
0
, K
0
, K
s
0
, and
0
are independent of y as well. The
exact X-dependence of T
0
will be derived in Section 4.3 as a solvability condition for the
temperature T
2,0
.
We now turn to the X-component of the momentum equation (4.2). Keeping terms
up to rst order in M
a
, we nd that (4.2) reduces to
i M
a
0
u
1
=
dp
0
dX
M
a
dp
1
dX
+ M
a
W
2
o
y
_
0
u
1
y
_
+ o(M
a
).
Thus to leading order we nd that dp
0
/dX = 0 and p
0
must be constant. Collecting the
terms of rst order in M
a
, we nd that u
1
satises
u
1
=
i
0
dp
1
dX
+
1
2
u
1
y
2
, (4.8)
where
= (1 + i)
_
0
2
0
W
o
. (4.9)
Integrating (4.8) subject to v[
g
= 0, we nd that u
1
and u
1
) satisfy
u
1
=
iF
0
dp
1
dX
and u
1
) =
i(1 f
0
dp
1
dX
. (4.10)
where F
is chosen such that it vanishes on
+
g
and
g
,
F
:= 1
sinh(
1
+
g
) + sinh(
g
)
sinh(
(1
+
g
+1
g
))
cosh(
y)
+
cosh(
1
+
g
) cosh(
g
)
sinh(
(1
+
g
+1
g
))
sinh(
y), (4.11)
and
f
:= 1 F
) =
tanh(
1
g
)
1
g
, 1
g
:=
1
+
g
+1
g
2
, (4.12)
consistent with the notation of Arnott et al. [5], Rott [115], and Swift [131]. In particular
when 1
+
g
= 1
g
= 1
g
, we nd the familiar expression
F
= 1
cosh(
y)
cosh(
1
g
)
. (4.13)
Note that
, f
, and 1
g
are X-dependent.
Thermoacoustics in two-dimensional pores with variable cross-section 41
Next we go back to the temperature equation. Substituting our expansions into (4.4)
and (4.5), substituting p
0
is constant and T
0
= T
0
(X), and collecting the rst-order
terms, we nd for the gas temperature
M
a
0
C
p
_
iT
1
+ u
1
dT
0
dX
_
= i M
a
T
0
p
1
+ M
a
K
0
2N
2
L
2
T
1
y
2
+ o(M
a
), (4.14)
and for the solid temperature
iM
a
s
0
C
s
T
s
1
= M
a
K
s
0
2N
2
s
2
T
s
1
y
2
+ o(M
a
). (4.15)
Setting the coefcient of M
a
equal to zero in (4.14) and (4.15), and substituting (4.10) for
u
1
, we nd after some manipulation that T
1
and T
s
1
can be obtained from
T
1
2
k
2
T
1
y
2
=
1
0
dT
0
dX
dp
1
dX
F
+
T
0
0
C
p
p
1
, (4.16a)
T
s
1
2
s
2
T
s
1
y
2
= 0, (4.16b)
where analogous to (4.9) we dene
k
:= (1 + i)
0
K
0
C
p
N
L
, (4.17)
s
:= (1 + i)
s
0
K
s
0
C
s
N
s
. (4.18)
Collecting the rst-order terms, the boundary conditions given in (4.7b, 4.7d) can be
written as
T
1
= T
s
1
, y = 1
g
, (4.19a)
T
s
1
y
= 0, y = 1
t
. (4.19b)
(4.19c)
Before we can solve (4.16), we rst need to introduce some auxiliary functions. For the
gas we dene
F
+
k
:= 1
sinh(
k
1
+
g
)
sinh(
k
(1
+
g
+1
g
))
cosh(
k
y) +
cosh(
k
1
+
g
)
sinh(
k
(1
+
g
+1
g
))
sin(
k
y), (4.20)
F
k
:= 1
sinh(
k
1
g
)
sinh(
k
(1
+
g
+1
g
))
cosh(
k
y)
cosh(
k
1
g
)
sinh(
k
(1
+
g
+1
g
))
sin(
k
y), (4.21)
F
k
:= F
+
k
+ F
k
1. (4.22)
42 4.2 Acoustics
and in the solid (with y
+
= 1
+
t
y, y
= 1
t
+ y)
F
+
s
:= 1
cosh(
s
y
+
)
cosh(
s
1
+
s
)
, (4.23)
F
s
:= 1
cosh(
s
y
)
cosh(
s
1
s
)
, (4.24)
chosen such that F
k
[
g
= 0, F
+
k
[
+
g
= 1, F
+
k
[
g
= 0, F
k
[
+
g
= 0, F
k
[
g
= 1, F
s
[
g
= 0, and
F
s
/y[
t
= 0. Additionally we also dene
f
k
:= 1 F
k
) =
tanh(
k
1
g
)
k
1
g
, f
k
:= 1 F
k
) =
1
2
f
k
, (4.25)
f
+
s
:= 1 F
+
s
)
+
s
=
tanh(
s
1
+
s
)
s
1
+
s
, f
s
:= 1 F
s
)
s
=
tanh(
s
1
s
)
s
1
s
. (4.26)
Using these auxiliary functions we can integrate (4.16) subject to (4.19), so that
T
1
=
T
0
F
k
0
C
p
p
1
F
k
P
r
F
2
(1 P
r
)
0
dT
0
dX
dp
1
dX
+ T
+
b
1
(1 F
+
k
) + T
b
1
(1 F
k
), (4.27a)
T
s
1
= T
b
1
_
1 F
s
_
, (4.27b)
where T
+
b
1
= T
1
[
+
g
and T
b
1
= T
1
[
g
are yet to be determined. To leading order, the
remaining boundary condition (4.7c) can be written as
K
0
T
1
y
y=1
+
g
= K
s
0
T
+
s
1
y
+
y
+
=1
+
s
, K
0
T
1
y
y=1
g
= K
s
0
s
1
y
=1
s
. (4.28)
Substituting the expressions for T
1
and T
s
1
, we nd the following two coupled equations
for T
b
1
and T
b
1
:
K
s
0
1
+
s
2
s
f
+
s
T
+
b
1
= K
0
1
g
2
k
f
k
_
T
0
p
1
0
C
p
1 f
/f
k
2
(1 P
r
)
0
dT
0
dX
dp
1
dX
+
T
+
b
1
2 sinh
2
(
k
1
g
)
(1 + coth
2
(
k
1
g
))
T
b
1
2
_
, (4.29)
and
K
s
0
1
s
2
s
f
s
T
b
1
= K
0
1
g
2
k
f
k
_
T
0
p
1
0
C
p
1 f
/f
k
2
(1 P
r
)
0
dT
0
dX
dp
1
dX
(1 + coth
2
(
k
1
g
))
T
+
b
1
2
+
T
b
1
2 sinh
2
(
k
1
g
)
_
. (4.30)
Thermoacoustics in two-dimensional pores with variable cross-section 43
Here we used that
2
k
= P
r
and
F
k
y
y=1
g
= 1
g
2
k
f
k
,
F
y=1
g
= 1
g
,
F
k
y
y=1
g
=
1
2
1
g
2
k
f
k
sinh
2
(
k
1
g
)
,
F
k
y
y=1
g
=
1
2
(1 + coth
2
(
k
1
g
))1
g
2
k
f
k
,
F
+
s
y
+
y
+
=1
+
s
= 1
+
g
2
s
f
+
s
,
F
s
y
=1
s
= 1
2
s
f
s
.
Introducing the stack heat-capacity ratios
s
:=
1
K
0
1
g
2
k
f
k
K
s
0
1
s
2
s
f
s
, (4.31)
we can rewrite (4.29) and (4.30) as
_
1
s
2 sinh
2
(
k
1
g
)
_
T
b
1
+
s
2
_
1 + coth
2
(
k
1
g
)
_
T
b
1
=
s
_
T
0
p
1
0
C
p
1 f
/f
k
2
(1 P
r
)
0
dT
0
dX
dp
1
dX
_
. (4.32)
Solving for T
b
1
and T
+
b
2
, we obtain
T
+
b
1
=
+
s
1 +
+
s
(1 +T
+
)
_
T
0
p
1
0
C
p
1 f
/f
k
2
(1 P
r
)
0
dT
0
dX
dp
1
dX
_
, (4.33a)
T
b
1
=
s
1 +
s
(1 +T
)
_
T
0
p
1
0
C
p
1 f
/f
k
2
(1 P
r
)
0
dT
0
dX
dp
1
dX
_
, (4.33b)
where
T
+
=
(
+
s
s
) cosh(2
k
1
g
)
(1 +
+
s
)(1 +
s
+ (
s
1) cosh(2
k
1
g
) + (
+
s
s
) cosh(2
k
1
g
)
, (4.34a)
T
=
(
s
+
s
) cosh(2
k
1
g
)
(1 +
s
)(1 +
+
s
+ (
+
s
1) cosh(2
k
1
g
) + (
s
+
s
) cosh(2
k
1
g
)
. (4.34b)
Note that T
= 0, when 1
+
s
= 1
s
.
In an ideal stack the solid has sufcient heat capacity to keep the stack plates isother-
mal, so that the stack heat-capacityratio
s
is equal to zero. Figure 4.2 shows the absolute
value of
s
for a helium-lled parallel-plate stack for various porosities and plate mate-
rials and a xed hydraulic radius. The graphs show that only when the stack plates are
thick enough (B
r
1) the stack can be considered ideal.
Using relations (A.5) and (A.8) and substituting T
1
we can derive the following rela-
44 4.2 Acoustics
0 0.2 0.4 0.6 0.8 1
0
0.2
0.4
0.6
0.8
1
|
s
|
B
r
stainless steel
alumina
glass
mylar
polystyrene
Figure 4.2: The absolute value of
s
plotted as a function of the blockage ratio B
r
for various plate
materials. We consider a helium-lled parallel-plate stack at room temperature and x N
L
= 1.
The stack is ideal for small blockage ratios (thick plates).
tion for the acoustic density uctuations:
1
=
1
c
2
[1 + ( 1)(1 F
k
)] p
1
+
F
k
P
r
F
2
(1 P
r
)
dT
0
dX
dp
1
dX
0
T
+
b
1
(1 F
+
k
)
0
T
b
1
(1 F
k
) (4.35)
=
1
c
2
_
1 + ( 1)
_
1 F
k
+
s
(1 +T
+
)
1 +
+
s
(1 F
+
k
)
s
(1 +T
)
1 +
s
(1 F
k
)
__
p
1
+
_
F
+
F
k
F
(1 P
r
)
+
+
s
(1 +T
+
)
(1 f
/f
k
)(1 F
+
k
)
(1 P
r
)(1 +
+
s
)
+
s
(1 +T
)
(1 f
/f
k
)(1 F
k
)
(1 P
r
)(1 +
s
)
_
2
dT
0
dX
dp
1
dX
. (4.36)
As a result we nd
1
) =
1
c
2
_
1 +
1
1 +
s
f
k
_
p
1
+
_
1 f
+
f
f
k
(1 P
r
)(1 +
s
)
_
2
dT
0
dX
dp
1
dX
. (4.37)
where
s
is the effective stack heat-capacity ratio, given by
1
1 +
s
=
1
2
_
1
+
s
T
+
1 +
+
s
+
1
s
T
1 +
s
_
(4.38a)
= 1
1
2
_
+
s
(1 +T
+
)
1 +
+
s
+
s
(1 +T
)
1 +
s
_
. (4.38b)
Finally, we turn to the continuity equation (4.1). Expanding the variables in powers
Thermoacoustics in two-dimensional pores with variable cross-section 45
of M
a
and keeping terms up to rst order in M
a
we nd
i M
a
1
+ M
a
X
(
0
u
1
) + M
a
0
v
1
y
= o(M
a
), (4.39)
We can use equation (4.39) to express v
1
in terms of
0
, u
1
and p
1
,
v
1
=
1
0
_
y
1
g
_
i
1
+
X
(
0
u
1
)
_
d y. (4.40)
where we applied the boundary condition that v
1
vanishes at
g
.
Note that v also vanishes at the boundary y = 1
+
g
. Therefore, substituting (4.10) for
u
1
, multiplying with i, averaging (4.39) over a cross-section, and using the Leibniz
rule, we obtain the following equation as a consistency relation for v
1
:
1
) =
1
1
g
d
dX
_
1
g
(1 f
)
dp
1
dX
_
i
21
g
d1
+
g
dX
0
u
1
1
+
g
i
21
g
d1
g
dX
0
u
1
g
=
1
1
g
d
dX
_
1
g
(1 f
)
dp
1
dX
_
. (4.41)
After substitution of (4.37) we obtain
2
c
2
_
1 +
1
1 +
s
f
k
_
p
1
+ (1 f
)
dT
0
dX
dp
1
dX
+
f
f
k
(1 P
r
)(1 +
s
)
dT
0
dX
dp
1
dX
+
1
1
g
d
dX
_
1
g
(1 f
)
dp
1
dX
_
= 0. (4.42)
Then using
0
d
dX
_
1
0
_
=
1
0
d
0
dX
=
1
0
T
0
dT
0
dX
=
dT
0
dX
, (4.43)
we obtain a reduced wave equation for p
1
valid for slowly varying cross-sections,
2
c
2
_
1 +
1
1 +
s
f
k
_
p
1
+
f
f
k
(1 P
r
)(1 +
s
)
dT
0
dX
dp
1
dX
+
0
1
g
d
dX
_
1
g
1 f
0
dp
1
dX
_
= 0. (4.44)
Combining (4.10) and (4.44) we can derive the following two coupled ordinary differ-
ential equations for p
1
and u
1
)
d(1
g
u
1
))
dX
=a
3
p
1
+ a
4
dT
0
dX
u
1
), (4.45a)
dp
1
dX
=a
5
u
1
), (4.45b)
46 4.3 Mean temperature
where
a
3
:=
i
0
c
2
_
1 +
1
1 +
s
f
k
_
, (4.46a)
a
4
:=
( f
f
k
)
(1 P
r
)(1 f
)(1 +
s
)
, (4.46b)
a
5
:=
i
0
1 f
. (4.46c)
To solve these equations it only remains to determine T
0
and apply appropriate bound-
ary conditions in X. In the next section the system of equations will be completed, when
an ordinary differential equation for the mean temperature T
0
is derived. Given T
0
, p
1
and u
1
), we can compute u
1
, T
1
, T
s
1
,
1
, and v
1
from (4.10), (4.27), (4.35), and (4.40),
respectively.
4.3 Mean temperature
In this section we will the conservation of energy as given by (4.6) to determine T
0
.
When calculating T
2,0
we will determine T
0
as a solvability condition from the assump-
tion of slow variation.
Putting
2
= M
2
a
, we can rewrite (4.6) as follows:
t
_
1
2
([u[
2
+M
2
a
[v[
2
) +
_
=
X
_
1
2
u([u[
2
+M
2
a
[v[
2
) +vh M
2
a
K
2N
2
L
T
X
_
y
_
1
2
v([u[
2
+M
2
a
[v[
2
) +vh
K
2N
2
L
T
y
W
2
o
u
u
y
_
+
M
2
a
F
r
ub
x
+ o(M
4
a
).
(4.47)
Suppose there is an average heat ux to the boundary given by
F. Then averaged in
time, the left hand side of this equation will reduce to
F. Consequently, on expanding
in powers of M
a
and keeping terms up to second order, we nd
X
_
M
2
a
0
u
1
h
1
+ M
2
a
h
0
m
2
M
2
a
K
0
2N
2
L
dT
0
dX
_
+
y
_
M
2
a
0
v
1
h
1
+ M
2
a
h
0
n
2
M
2
a
K
0
2N
2
L
T
2,0
y
M
2
a
2N
2
L
K
1
T
1
y
M
2
a
0
W
2
o
u
1
u
1
y
_
= M
2
a
F
2
+ o(M
2
a
),
where m
2
and n
2
are the components in X and y directions of the second-order time-
averaged mass ux m
2
,
m
2
:=
0
(v
2,0
+ Re
_
v
2,2
e
2it
_
) + Re
_
1
e
it
_
Re
_
v
1
e
it
_
=
0
v
2,0
+
1
2
Re [
1
v
1
] .
Thermoacoustics in two-dimensional pores with variable cross-section 47
Using (3.25) and rearranging terms we nd
K
0
2
T
2,0
y
2
+
1
2
y
Re
_
K
1
T
1
y
_
+
d
dX
_
K
0
dT
0
dX
_
=
N
2
L
X
(
0
Re [u
1
h
1
] + 2h
0
m
2
)
+
N
2
L
y
_
0
Re [v
1
h
1
] + 2h
0
n
2
0
W
2
o
Re
_
u
1
u
1
y
_
_
2N
2
L
F
2
. (4.48)
Similarly we can show that (4.5) reduces to
K
s
0
2
T
s
2,0
y
2
+
1
2
Re
_
K
s
1
T
s
1
y
_
+
d
dX
_
K
s
0
dT
0
dX
_
= 0. (4.49)
We will now use the ux condition (4.7c) and (4.7d) to derive a differential equation for
T
0
. Putting
2
=M
2
a
, averaging in time, expanding in powers of M
a
and collecting the
second order terms in M
a
, we nd
K
0
T
2,0
y
+
1
2
Re
_
K
1
T
1
y
_
K
s
0
T
s
2,0
y
2
Re
_
K
s
1
T
s
1
y
_
=
_
K
0
K
s
0
_ 1
g
X
dT
0
dX
,
if y = 1
g
, y
= 1
s
, (4.50)
and
K
s
0
T
s
2,0
y
+
1
2
Re
_
K
s
1
T
s
1
y
_
= K
s
0
1
t
X
dT
0
dX
, if y
= 0. (4.51)
We will combine (4.48) and (4.49) with (4.50) and (4.51). First we integrate (4.49)
over its cross-section, multiply with , and add it to (4.48), again after integrating over
its cross-section, while using the Leibniz rule. This leads to
_
K
0
T
2,0
y
+
1
2
Re
_
K
1
T
1
y
__
y=1
+
g
y=1
g
+
_
K
s
0
T
s
2,0
y
+
+
1
2
Re
_
K
s
1
T
s
1
y
+
_
_
y
+
=1
+
s
y
+
=0
+
_
K
s
0
T
s
2,0
y
+
+
1
2
Re
_
K
s
1
T
s
1
y
_
_
y
=1
s
y
=0
+ 21
g
d
dX
_
K
0
dT
0
dX
_
+ 21
s
d
dX
_
K
s
0
dT
0
dX
_
=
N
2
L
X
_
2
0
1
g
Re [u
1
h
1
)] + 4h
0
M
2
_
4N
2
L
1
g
F
2
, (4.52)
where
M
2
= 1
g
m
2
). After inserting the ux conditions (4.50) and (4.51) and rearrang-
ing terms, we can simplify (4.52) further into
d
H
2
dX
=
d
dX
_
h
0
M
2
+1
g
0
2
Re [u
1
h
1
)]
S
2
k
2
(K
0
1
g
+K
s
0
1
s
)
dT
0
dX
_
, (4.53)
where we put 1
g
F =:
d
H
dX
. The quantity
H is the time-averaged total power (or energy
ux) along X. In steady state, for a cyclic refrigerator or prime mover without heat ows
48 4.3 Mean temperature
to the surroundings
H will be constant as
F = 0.
Combining the thermodynamic expressions (A.7) and (A.9) we nd
dh = Tds +
1
dp = C
p
dT +
1
(1 T)dp. (4.54)
Moreover, it follows that
h
0
= C
p
(T
0
T
re f
), (4.55)
where T
re f
is a reference temperature. Substituting (4.54) and (4.55) into (4.53), we nd
H
2
=
M
2
C
p
(T
0
T
re f
) +
1
2
0
C
p
1
g
Re [T
1
u
1
)] +
1
g
2
(1 T
0
)Re [p
1
u
1
)]
_
K
0
1
g
+K
s
0
1
s
_
S
2
k
2
dT
0
dX
, (4.56)
where the constant of integration has been chosen such that
H
2
= 0 when there is no
exchange of heat with the environment.
Before we substitute T
1
and u
1
we will rst prove the following relationships:
F
k
F
) =
1 f
k
+ P
r
(1 f
)
1
2
f
1 + P
r
, (4.57a)
F
k
F
) =
1 f
k
+ P
r
(1 f
)
1 + P
r
, (4.57b)
[F
[
2
) = 1 Re [ f
] . (4.57c)
We will only prove the rst statement as it is most general; the other two equalities can
be proven in the same way. Dene
I
1
:= F
k
F
), (4.58)
I
2
:=
_
F
k
y
F
y
_
. (4.59)
We have the following relationships for F
and F
k
:
F
= 1 +
1
2
F
y
2
F
, (4.60)
F
k
= 1 +
1
2
k
2
F
k
y
2
. (4.61)
Integrating by parts, using (4.60), substituting (
)
2
=
2
, and using the boundary
Thermoacoustics in two-dimensional pores with variable cross-section 49
conditions for F
k
and F
, we can rewrite I
1
as follows:
I
1
=
1
21
g
_
1
+
g
1
g
F
k
_
1
1
2
F
y
2
_
dy
= 1 f
k
1
21
g
_
1
+
g
1
g
F
2
F
y
2
dy
= 1 f
k
1
21
g
k
F
1
+
g
1
g
+
1
21
g
_
1
+
g
1
g
F
k
y
F
y
dy
= 1 f
k
1
2
f
+
I
2
. (4.62)
In the same way, substituting (4.61) rather than (4.60), we nd
I
1
= 1 f
I
2
2
k
. (4.63)
Eliminating the common term I
2
from equations (4.62) and (4.63), we nd
I
1
=
1 f
k
+ P
r
(1 f
)
1
2
f
1 + P
r
, (4.64)
as claimed in (4.57a). Replacing F
k
by F
k
or F
, we can repeat the same analysis to prove
(4.57b) and (4.57c).
Substituting expressions (4.10) and (4.27a) for u
1
and T
1
, while using relations (4.57)
and (4.38b), we nd
T
1
u
1
) =
T
0
0
C
p
F
k
F
)
1 f
p
1
u
1
) + i
F
k
F
) P
r
[F
[
2
)
(1 P
r
)[1 f
[
2
dT
0
dX
[u
1
)[
2
+ T
+
b
1
u
1
)
F
) F
+
k
F
)
1 f
+ T
b
1
u
1
)
F
) F
k
F
)
1 f
=
T
0
p
1
u
1
0
C
p
_
1
f
k
f
(1 + P
r
)(1 +
s
)(1 f
)
_
+
i(1 P
r
+ P
r
Re ( f
))
(1 P
r
)[1 f
[
2
dT
0
dX
[u
1
)[
2
i[u
1
)[
2
(1 P
r
)[1 f
[
2
dT
0
dX
_
f
+
( f
k
f
)(1 +
s
f
/f
k
)
(1 + P
r
)(1 +
s
)
_
.
Taking the real part, we get
Re [T
1
u
1
)] =
T
0
0
C
p
Re
__
1
f
k
f
(1 + P
r
)(1 +
s
)(1 f
)
_
p
1
u
1
)
_
+
[u
1
)[
2
(1 P
r
)[1 f
[
2
dT
0
dX
Im
_
f
+
( f
k
f
)(1 +
s
f
/f
k
)
(1 + P
r
)(1 +
s
)
_
. (4.65)
50 4.3 Mean temperature
After substitution of (4.65) into (4.56) we arrive at
H
2
=
M
2
C
p
_
T
0
T
re f
_
+
1
2
1
g
Re
_
p
1
u
1
)
_
1 T
0
f
k
f
(1 + P
r
)(1 +
s
)(1 f
)
__
+1
g
0
C
p
[u
1
)[
2
2(1 P
r
)[1 f
[
2
dT
0
dX
Im
_
f
+
(1 +
s
f
/f
k
)( f
k
f
)
(1 + P
r
)(1 +
s
)
_
_
K
0
1
g
+K
s
0
1
s
_
S
2
k
2
dT
0
dX
. (4.66)
Given
H
2
, we can solve (4.37) for dT
0
/dX
dT
0
dX
=
2
H
2
2
M
2
C
p
_
T
0
T
re f
_
1
g
Re [a
1
p
1
u
1
]
1
g
a
2
[u
1
)[
2
_
K
0
1
g
+K
s
0
1
s
_
S
2
k
, (4.67)
where
a
1
:= 1 T
0
f
k
f
(1 + P
r
)(1 +
s
)(1 f
)
, (4.68)
a
2
:=
0
C
p
[u
1
)[
2
(1 P
r
)[1 f
[
2
Im
_
f
+
(1 +
s
f
/f
k
)( f
k
f
)
(1 + P
r
)(1 +
s
)
_
. (4.69)
Equation (4.67) together with equations (4.46a) and (4.46b) forma complete coupled sys-
tem of differential equations for T
0
, u
1
), and p
1
. This system gives a generalization of
the Swift equations [135], extended to include the case of slowly varying cross-sections.
It is possible to go one step further and improve the expression for the mean tem-
perature by determining the correction term T
2,0
. If we integrate (4.48) and (4.49) twice
with respect to y, we can determine T
2,0
and T
s
2,0
up to X-dependent functions T
b
2,0
. In
the same way as the differential equation (4.67) for T
0
followed as a solvability condition
for T
2,0
and T
s
2,0
, we can derive an ordinary differential equation for T
b
2,0
as a solvability
condition for the fourth-order mean temperatures T
4,0
and T
s
4,0
. Performing this analysis
it is possible to include transverse variations into the mean temperature prole, since
T
2,0
does depend on y in contrast to T
0
. In this thesis we will not go this far, as this
would require a lengthy derivation of both the second and third harmonics. We will,
however, compute the second harmonics in Section 4.6 below.
Thermoacoustics in two-dimensional pores with variable cross-section 51
4.4 Integration of the generalized Swift equations
It has been shown in Section 4.2 and 4.3 that all acoustic variables can be determined, if
the following system of ordinary differential equations is solved for T
0
, p
1
, and u
1
):
dT
0
dX
=
2
H
2
2
M
2
C
p
_
T
0
T
re f
_
1
g
Re [a
1
p
1
u
1
)]
1
g
a
2
[u
1
)[
2
_
K
0
1
g
+K
s
0
1
s
_
S
2
k
, (4.70a)
d(1
g
u
1
))
dX
=a
3
1
g
p
1
+ a
4
1
g
dT
0
dX
u
1
), (4.70b)
dp
1
dX
=a
5
u
1
), (4.70c)
where
a
1
:= 1 T
0
f
k
f
(1 + P
r
)(1 +
s
)(1 f
)
, (4.71a)
a
2
:=
0
C
p
[u
1
)[
2
(1 P
r
)[1 f
[
2
Im
_
f
+
(1 +
s
f
/f
k
)( f
k
f
)
(1 + P
r
)(1 +
s
)
_
, (4.71b)
a
3
:=
i
0
c
2
_
1 +
( 1) f
k
1 +
s
_
, (4.71c)
a
4
:=
( f
f
k
)
(1 P
r
)(1 +
s
)(1 f
)
, (4.71d)
a
5
:=
i
0
1 f
. (4.71e)
With suitable boundary conditions these equations can be integrated numerically. For
example, if a stack is positioned in a resonator with the left stack end at distance x
L
from
the closed end, then one can impose
p
1
(0) = p
L
cos(kx
L
), u
1
)(0) =
i p
L
L
c
L
sin(kx
L
), T
0
(0) = T
L
, (4.72)
where k is the wave number and p
L
is the pressure amplitude at the closed end. In
addition we still need to impose
H
2
, which is nonzero in general and it may also depend
on X. In a steady-state situation, without heat exchange to the surroundings and zero
mass ow, it follows that
H
2
= 0. In this case the thermoacoustic heat ow is balanced
by a return diffusive heat ow in the stack and in the gas, so that the net heat ow is
zero. Alternatively, one can also impose a temperature T
R
on the right stack end and
look for the corresponding
H
2
that gives the desired temperature difference.
In Sections 6 and 7 we will show some practical examples of thermoacoustic systems
for which the equations above have been implemented. Under certain conditions, one
can even nd an exact solution as well. In the next sections we will treat a few of these
cases in full detail.
We see that the total energy ux through the stack, the cross-sectional variations, the
small-amplitude acoustical oscillations and the resulting streaming may cause O(1)-
52 4.4 Integration of the generalized Swift equations
variations in the mean temperature. The energy ux
H
2
can be changed by external
input or extraction of heat at the stack ends and consequently change the mean temper-
ature prole. The acoustic oscillations affect the mean temperature via the well-known
shuttling effect (see e.g. [131]). With a nonzero mass ux
M
2
heat will be carried to the
hot or cold heat exchanger and thus affect the mean temperature also. This can either
be a loss or a contribution to the heat transfer.
Note that the temperature gradient scales with and 1/S
2
k
. Thus in the limits 0
(short-stack limit) or S
k
(small velocities; heat conduction is dominating), the tem-
perature difference across the stack will tend to zero, unless sufcient heat is supplied
or extracted ([
H
2
[ 1). Furthermore, the velocity and pressure gradients also scale
with , which justies the assumption of constant-stack pressure and velocity that is
commonly applied in the short-stack approximation (see e.g. [131], [151]).
Finally, remember that these equations result from a linearization in both M
a
and
. As a result there is still a dimensionless number S
k
appearing in the equations that
contains both and M
a
. In (3.15) we showed that
S
k
=
N
L
M
a
,
so that the perturbation variables are weakly affected by the linearization parameters
M
a
and . Hence the theory derived here is not exactly linear as it is often described,
which is why we prefer to use the term weakly non-linear to indicate that there is still
a weak non-linearity involved. If the amplitude M
a
becomes large enough such that
S
k
1 then the temperature gradient will arise solely due to the thermoacoustic heat
ow; if the amplitude M
a
becomes very small, so that S
k
1, then the temperature
gradient will arise solely due to heat conduction through solid and gas.
4.4.1 Exact solution at constant temperature
If we apply equations (4.70) to a problem involving a channel supporting a constant
temperature, then the equations will simplify greatly. This case is particularly inter-
esting for the analysis of insulated resonators, with or without variable cross-sections.
Baks et al. [18] showed both theoretically and experimentally what kind of cooling pow-
ers can be expected (in a pulse tube). In this section we will focus on deriving analytic
expressions for the pressure and velocity proles in arbitrarily shaped channels.
Setting dT
0
/dX = 0, we nd we have to solve
d(1
g
u
1
))
dX
=a
3
1
g
p
1
, (4.73a)
dp
1
dX
=a
5
u
1
). (4.73b)
We can rewrite these equations into a reduced wave equation for the pressure
d
2
p
1
dX
2
+ C
dp
1
dX
+ k
2
p
1
= 0, C =
a
5
1
g
d
dX
_
1
g
a
5
_
, (4.74)
Thermoacoustics in two-dimensional pores with variable cross-section 53
where the complex wave number k is dened as
k =
a
3
a
5
=
c
1
1 f
_
1 +
1
1 +
s
f
k
_
.
The viscous dissipation due to interaction with the wall gives rise to its imaginary part.
For wide tubes that have large Lautrec numbers it follows that 0 < Im[k] 1 and
there will be little dissipation. When C and k are constant, equation (4.74) coincides with
Websters horn equation [110, 149].
Both C and k depend on 1
g
in a rather complicated manner. However, for straight
pores with constant 1
g
we nd that k is constant and C = 0. It follows that the pressure
and velocity can be written as
p
1
(X) = Ae
ikX
+ Be
ikX
, (4.75a)
u
1
)(X) =
0
c
_
Ae
ikX
Be
ikX
_
, (4.75b)
with A and B integration constants and
=
1
c
(1 f
)
_
1 +
1
1 +
s
f
k
_
.
For variable cross-sections we cannot nd an exact solution as above because C and
k depend on 1
g
in a complicated manner. However, in view of the asymptotic behavior
of the hyperbolic tangent, it follows that f
, f
k
, and
s
will not vary much in X, especially
for wide tubes, so that in good approximation we can replace k by its average value
k
and C by
1
1
g
d
dX
1
g
. This leads to the following equation for p
1
d
2
p
1
dX
2
+
1
1
g
d
dX
(1
g
)
dp
1
dX
+
k
2
p
1
= 0. (4.76)
Next, for specic choices of the geometry, we can solve (4.76) analytically. For most
practical applications 1
g
is either constant or linearly changing. If we put
1
g
= a(X X
0
),
for some a > 0 and X
0
R, then we need to solve
d
2
p
1
dX
2
+
1
X X
0
dp
1
dX
+
k
2
p
1
= 0. (4.77)
After a transformation =
k(X X
0
), we nd that p
1
solves the Bessels differential
equation
2
d
2
p
1
d
2
+
dp
1
d
+
2
p
1
= 0.
The general solution is given in terms of the zeroth order Bessel functions of the rst
54 4.4 Integration of the generalized Swift equations
and second kind.
p
1
(X) = AJ
0
[
k(X X
0
)] + BY
0
[
k(X X
0
)]. (4.78)
For several other geometries exact solutions can be obtained as well. For example, hy-
perbolic or exponential horns occur frequently in resonators used for thermoacoustic
applications (e.g. [142]). Suppose we put
1
g
= ae
2bX
,
for some a > 0 and b R, then we need to solve
d
2
p
1
dX
2
+ 2b
dp
1
dX
+
k
2
p
1
= 0. (4.79)
The general solution is given by
p
1
(X) = e
aX
_
Acos(
kX) + B sin(
kX)
_
. (4.80)
Alternatively, putting
1
g
=
1
X X
0
,
for some X
0
R, we nd an equation
d
2
p
1
dX
2
1
X X
0
dp
1
dX
+
k
2
p
1
= 0, (4.81)
which only differs from (4.77) by the minus-sign in the second term. The general solu-
tion is thus given by
p
1
(X) = AJ
0
[
k(X X
0
)] + BY
0
[
k(X X
0
)]. (4.82)
4.4.2 Short-stack approximation
Many practical thermoacoustic devices have stacks of short length relative to the wave-
length. One can take advantage of this property to nd an approximate solution to (4.70)
in the stack. The relevant dimensionless number for this analysis is the Helmholtz num-
ber based on the length of the stack. We will expand the mean and acoustic variables
once again in powers of and derive exact solutions for the perturbation variables. Let
f
i
be one of the original perturbation variables, then we expand
f
i
= f
i0
+ f
i1
+ , 1.
Furthermore, for illustration, we put the following boundary conditions:
X = 0 : T
0
= T
L
, u
1
) = u
L
, p
1
= p
L
. (4.83)
We consider a steady-state situation
H = 0, in which the thermoacoustic heat ow is
Thermoacoustics in two-dimensional pores with variable cross-section 55
balanced by a return diffusive heat ow in the stack and in the gas. In addition, we as-
sume there is no streaming, so that
M = 0. Substituting the expansions into (4.70a), we
nd to leading order that T
00
is constant and (and thus also
00
, a
10
, a
20
, a
30
, a
40
and a
50
).
Subsequently we nd from (4.70b) and (4.70c) that p
10
and 1
g
u
10
) must be constant as
well. It follows from (4.83) that
T
00
= T
L
, u
10
) =
u
L
1
g
, p
10
= p
L
. (4.84)
Going one order higher in we nd that T
01
, p
11
, and u
11
) can be found from:
dT
01
dX
=
1
g
Re [a
10
p
10
u
10
)]
(K
00
1
g
+K
s
00
1
s
)S
2
k
a
20
1
g
[u
10
)[
2
, (4.85a)
d(1
g
u
11
))
dX
= a
30
1
g
p
10
+ a
40
1
g
dT
01
dX
u
10
), (4.85b)
dp
11
dX
= a
50
u
10
). (4.85c)
Integrating these equations, we nd
T
01
(X) =
_
1
g
Re [a
10
p
10
u
10
)]
(K
00
1
g
+K
s
00
1
s
)S
2
k
a
20
1
g
[u
10
)[
2
dX, (4.86a)
u
11
)(X) =
1
1
g
_
a
30
_
1
g
p
10
+ a
40
1
g
dT
01
dX
u
10
)
_
dX, (4.86b)
p
11
(X) =
_
a
50
u
10
) dX. (4.86c)
The temperature difference, generated across the stack, is of order and thus the tem-
perature difference will increase linearly with increasing stack length or frequency.
Continuing this way it is possible to determine the higher order terms in as well.
In general we get for i = 0, 1, 2 . . .,
T
0(i+1)
=
_
_
j+k+l=i
Re
_
a
1j
p
1k
u
1l
)
_
+
j+k+l=i+1
li
a
j
[u
1k
)[
2 dT
0l
dx
(K
00
1
g
+K
s
00
1
s
)S
2
k
a
20
[u
10
)[
2
j+k=i+1
li
(K
0j
1
g
+K
s
0j
1
s
)S
2
k
(K
00
1
g
+K
s
00
1
s
)S
2
k
a
20
[u
10
)[
2
dT
0k
dx
_
dX, (4.87a)
u
1(i+1)
) =
1
1
g
_
_
j+k=i
a
3j
1
g
p
1k
+
j+k+l=i
a
4j
1
g
dT
0k
dX
u
1l
)
_
dX, (4.87b)
p
1(i+1)
=
_
j+k=i
a
5j
u
1k
) dX. (4.87c)
Consider a short parallel-plate stack placed at position x
s
in an acoustic standing
wave with wave number k. For constant 1
g
all three expressions in (4.86) will be linear
56 4.4 Integration of the generalized Swift equations
in X. In particular we nd that the temperature difference generated across the stack is
given by
T
0
=
_
1
0
dT
0
dX
dX
=
1
g
Re [a
10
p
10
u
10
)]
(K
00
1
g
+K
s
00
1
s
)S
2
k
a
20
1
g
[u
10
)[
2
+ o(), if
d1
g
dX
= 0. (4.88)
Note that a
10
, a
20
, K
00
and K
s
00
are constant and are found from substitution of T
00
.
Putting p
10
= T cos(kx
s
) and u
10
) = iT cos(kx
s
), we nd that (4.88) transforms into
T
0
=
1
g
Im[a
10
] [T[
2
sin(2kx
s
)
2(K
00
1
g
+K
s
00
1
s
)S
2
k
a
20
1
g
[T[
2
[(1 cos(2kx
s
))
+ o(). (4.89)
This result can be seen as a generalization of the short-stack approximation per-
formed by Wheatley et al [151], whose prediction is only valid for wide enough pores. In
[151] and slightly modied in [11] a similar analysis was performed for a parallel-plate
stack positioned in an acoustic standing-wave. They solved the equations combining
a short-stack approximation ( 1) with a boundary-layer approximation (N
L
1).
Furthermore, only a leading-order solution was derived assuming constant pressure
and velocity in the stack. The result is a similar, but not identical, expression for the
temperature difference developed across the stack,
T
0
1
8
p
2
A
L
s
k
(1 +
P
r
)
re f
g
c
re f
(K
re f
s
R
s
+ K
re f
g
R
s
)(1 + P
r
)
sin(2kx
s
)
_
1 +
1
8
p
2
A
k
(1 P
r
P
r
)
re f
T
re f
(K
re f
s
R
s
+ K
re f
g
R
s
)( 1)(1 P
2
r
)
(1 cos(2kx
s
))
_
1
. (4.90)
Numerical evaluations show that when N
L
1 this expression agrees quite well with
our approximation (4.89). Unsurprisingly, when N
L
1 a discrepancy arises because
of the underlying assumption of wide pores.
4.4.3 Approximate solution in short wide channels supporting a tem-
perature gradient
In the previous sections we have found approximate solutions in the cases where ei-
ther T = 0 (section 4.4.1) or
H = 0 (section 4.4.2). An approximate solution can also
be found if a (large enough) nonzero temperature difference is imposed, provided the
channel is short and wide enough. One example of a tube that satises such require-
ments is the thermal buffer tube that is commonly used in traveling-wave devices (see
Chapter 7).
We start our analysis from the system of equations (4.70), with boundary conditions
Thermoacoustics in two-dimensional pores with variable cross-section 57
X = 0 : T
0
= T
L
, p
1
= p
L
, u
1
) = u
L
, (4.91a)
X = 1 : T
0
= T
R
. (4.91b)
Without loss of generality we may assume T
R
> T
L
. Our rst assumption is that a
considerable temperature difference is imposed across the tube, i.e. 0
T
R
T
L
T
L
= O(1).
Moreover, we assume the tube is short with respect to the wave length and wide with
respect to the penetration depths, so that 1 and N
L
1. We will use the smallness
of and N
L
to derive a leading-order approximation of the temperature, pressure, and
velocity proles.
Since N
L
1, we nd that to leading order f
= f
k
= 0 and
a
1
.
= 1, a
2
.
= 0, a
3
.
=
i
0
c
2
, a
4
.
= 0, a
5
.
=
i
0
c
2
. (4.92)
Moreover, as T
R
T
L
, it is suggested by equation (4.70a) that
H = O(
), for some
1. We therefore expand
H
2
,
M
2
, T
0
, p
1
, u
1
) as
H
2
=
H+ o(
), 1, (4.93a)
M
2
=
/+ o(
), 1, (4.93b)
p
1
p
L
=
T + o(
), 1, (4.93c)
u
1
) u
L
=
| + o(
), 1, (4.93d)
T
0
T
L
= T + o(
0
), 1, (4.93e)
0
= T + o(
0
), 1, (4.93f)
where , , and are yet to be determined. Since c, C
p
, K
0
, and K
s
0
depend only weakly
on T
0
we can assume they are constant. Using the ideal gas law T can be expressed in
terms of T
0
. Substituting (4.92) and (4.93) into (4.70) we nd to leading order
dT
dX
=
2
+1
H2
+1
C
p
/T 1
g
Re
_
(p
L
+
T)(u
L
+
)
_
_
K
0
1
g
+K
s
0
1
s
_
S
2
k
, (4.94a)
d(1
g
|)
dX
= i
1
1
g
Tc
2
(p
L
+
T), (4.94b)
dT
dX
= i
1
T(u
L
+
|). (4.94c)
The exponents , , , and will now be determined by balancing the terms on either
sides of the equations in (4.94). It follows from (4.94b) and (4.94c) that the left and right
hand side can only be balanced if = = 1. As a result equation (4.94a) becomes to
leading order
dT
dX
=
2
+1
H2
+1
C
p
/T 1
g
Re [p
L
u
L
]
_
K
0
1
g
+K
s
0
1
s
_
S
2
k
,
58 4.4 Integration of the generalized Swift equations
whose left and right hand side can only be balanced if = 1. Furthermore, it follows
that streaming will only affect the mean temperature if 1. Putting = = 1,
= = 1, we nd we have to solve
dT
dX
=
2H2/C
p
T
_
K
0
1
g
+K
s
0
1
s
_
S
2
k
, (4.95a)
d(1
g
|)
dX
=
i1
g
Tc
2
p
L
, (4.95b)
dT
dX
= iTu
L
, (4.95c)
subject to
T(0) = 0, |(0) = 0, T (0) = 0, T (1) = T
R
T
L
.
Integrating these equations, we nd
T
0
(X) = T
L
2H
g(X)
_
X
0
g()
_
K
0
1
g
() +K
s
0
1
s
()
_
S
2
k
d, (4.96a)
u
1
)(X) = u
L
ip
L
c
2
1
g
(X)
_
X
0
1
g
()
T()
d, (4.96b)
p
1
(X) = p
L
iu
L
_
X
0
T() d, (4.96c)
H = (T
R
T
L
)
g(1)
2
_
_
_
1
0
g()
_
K
0
1
g
() +K
s
0
1
s
()
_
S
2
k
d
_
_
1
, (4.96d)
where
g(X) = exp
_
_
X
0
2C
p
/
(K
0
1
g
() +K
s
0
1
s
())S
2
k
d
_
.
In particular, when we assume a straight tube, the expression for the temperature
prole simplies into
T
0
(X) = T
L
+ (T
R
T
L
)
1 e
X
1 e
, =
2C
p
/
(K
0
1
g
+K
s
0
1
s
)S
2
k
. (4.97)
We can now distinguish two limiting cases in which there is either a very large mass ux
or a very small mass ux. In the limit for /the temperature prole approaches
Thermoacoustics in two-dimensional pores with variable cross-section 59
an almost discontinuous prole,
lim
/
T
0
(X; /) = lim
T
L
+ (T
R
T
L
)
1 e
X
1 e
=
_
T
L
, X = 0,
T
R
, 0 < X 1,
(4.98a)
lim
/
T
0
(X; /) = lim
T
L
+ (T
R
T
L
)
1 e
X
1 e
=
_
T
L
, 0 X < 1,
T
R
, X = 1.
(4.98b)
On the other hand, when there is little or no mass streaming we nd a linear tempera-
ture prole
lim
/0
T
0
(X; /) = T
L
+ (T
R
T
L
)X. (4.99)
4.5 Acoustic streaming
This section discusses steady second-order mass ow in the stack driven by rst-order
acoustic phenomena. The analysis is valid for arbitrarily shaped pores supporting a
temperature gradient. Moreover, the temperature dependence of viscosity is taken into
account.
There are several types of streaming that can occur simultaneously. Three kinds
of streaming are shown in Fig. 4.3. Gedeon streaming refers to a nett time-averaged
mass ow through a stack pore, i.e.
M ,= 0, typical for looped-tube thermoacoustic
devices. Rayleigh streaming refers to a time-averaged toroidal circulation within a stack
pore driven by boundary-layer effects at the pore walls that can occur even if
M = 0.
Inner streaming refers to a time-averaged toroidal circulation in the whole stack, so that
the nett time-averaged mass ow can differ from pore to pore both in size and direction.
Possible causes for inner streaming are inhomogeneities at the stack ends or asymmet-
rical pores. Streaming effects are usually undesirable, but it was suggested in [135] that
for some applications it can be useful as a substitute for heat exchangers.
(a) Gedeon streaming (b) Rayleigh streaming (c) Inner streaming
Figure 4.3: Three types of mass streaming in stack
We start with the continuity equation (4.1). If we time-average the equation and
expand in powers of M
a
, then the zeroth and rst order terms in M
a
will drop out.
60 4.5 Acoustic streaming
Consequently we nd to leading order
X
_
0
u
2,0
_
+
0
v
2,0
y
+
1
2
Re
_
X
(
1
u
1
) +
y
(
1
v
1
)
_
= 0. (4.100)
We can use this equation to express v
2,0
in terms of u
2,0
and known lower-order quanti-
ties. Integrating over y, we nd
v
2,0
=
1
0
_
y
1
X
_
0
u
2,0
+
1
2
Re (
1
u
1
)
_
dy
1
2
0
Re (
1
v
1
) . (4.101)
We can then integrate (4.100) over a cross-section, while noting that v vanishes at the
boundary y = 1
g
and also at the centerline y = 0, to obtain
d
dX
_
1
g
0
u
2,0
) +
1
g
2
Re [
1
u
1
)]
_
= 0. (4.102)
The expression between the brackets is
M
2
the second-order time-averaged and cross-
sectional-averaged mass ux in the X-direction. It follows that
M
2
is constant, which
is to be expected as there is no mass transport through the stack walls. We can now
express u
2,0
) in terms of
M
2
and the rst order acoustics as follows:
u
2,0
) =
1
0
_
M
2
1
g
1
2
Re [
1
u
1
)]
_
. (4.103)
Note that even when the average mass ux
M = 0, there can still be a nonzero streaming
velocity as a result of rst-order velocity and density variations.
Next we turn to equation (4.3). Expanding in powers of M
a
and averaging in time
we nd to leading order
p
2,0
y
= 0,
so that p
2,0
= p
2,0
(X). Subsequently, time-averaging equation (4.2), we nd to leading
order
2
u
2,0
y
2
W
2
o
0
dp
2,0
dX
= f , (4.104)
where f is a collection of products of lower-order terms given by
f :=
1
2
W
2
o
0
Re
_
i
1
u
1
+
0
u
1
u
1
X
+
0
v
1
u
1
y
0
F
r
b
x
_
1
2
Re
_
y
_
0
u
1
y
__
.
The rst-order acoustics collected in f can be interpreted as a source termfor the stream-
ing on the left hand side, with the last term being characteristic for Rayleigh streaming.
Thermoacoustics in two-dimensional pores with variable cross-section 61
Integrating (4.104) twice with respect to y, we can write
u
2,0
(X, y) =
W
2
o
2
0
dp
2,0
dX
((1
+
g
)
2
y
2
)
_
1
+
g
y
_
y
0
f (X, y) d y dy C(1
+
g
y). (4.105)
where we used that u
2,0
vanishes on
+
g
. C is a constant of integration and will be
determined from the no-slip condition on
g
. Introducing F as the anti-derivative of f ,
F(X, y) :=
_
y
0
f (X, y) d y,
we nd
C =
W
2
o
2
0
dp
2,0
dX
_
1
+
g
1
g
_
F).
Substituting C into (4.105), we nd that u
2,0
is given by
u
2,0
(X, y) =
W
2
o
2
0
dp
2,0
dX
(1
g
+ y)(1
+
g
y)
_
1
+
g
y
F(X, y) dy +F)(1
+
g
y). (4.106)
Computing the cross-sectional average we can relate dp
2,0
/dX to u
2,0
) as follows:
dp
2,0
dX
=
3
0
1
2
g
W
2
o
_
u
2,0
) +
1
21
g
_
1
+
g
1
g
_
1
+
g
y
F(X, y) dy dy +1
g
F)
_
. (4.107)
Summarizing, given the mass ux
M
2
and the rst-order acoustics, u
2,0
), dp
2,0
/dX,
u
2,0
, and v
2,0
can be determined consecutively from (4.103), (4.107), (4.105), and (4.101).
4.6 Second harmonics
The previous few sections have provided a recipe to determine all acoustic variables, the
mean temperature T
0
, and the streaming variables. In this section we will show how the
second harmonics, the variables that oscillate at twice the fundamental frequency, can
be computed from the former variables.
Before we begin, we generalize the auxiliary functions from Section 4.2,
j,2
:=
2
j
, j = , k, s. (4.108)
62 4.6 Second harmonics
Similarly we dene (with 1
g
=
1
2
(1
+
g
+1
g
))
F
j,2
:= 1
sinh(
j,2
1
+
g
) + sinh(
j,2
1
g
)
sinh(2
j,2
1
g
)
cosh(
j,2
y),
+
cosh(
j,2
1
+
g
) cosh(
j,2
1
g
)
sinh(2
j,2
1
g
)
sin(
j,2
y), j = , k, (4.109a)
F
k,2
:= 1
sinh(
k,2
1
g
)
sinh(2
k,2
1
g
)
cosh(
k,2
y)
cosh(
k,2
1
g
)
sinh(2
k,2
1
g
)
sin(
k,2
y), (4.109b)
F
s,2
:= 1
cosh(
s,2
y
)
cosh(
s,2
1
s
)
, (4.109c)
and we introduce second-harmonic Rotts functions
f
,2
:= 1 F
,2
), f
k,2
:= 1 F
k,2
), f
k,2
:= 1 F
k,2
), f
s,2
:= 1 F
s,2
)
s
, (4.110)
and the stack heat capacity ratios
s,2
:=
1
K
0
1
g
2
k,2
f
k,2
K
s
0
1
s
2
s,2
f
s,2
. (4.111)
Again we start from the momentum equation. Expanding the variables in powers
of M
a
according to (3.24), substituting the expansions into the y-component of the mo-
mentum equation (4.3), putting
2
= M
2
a
, and collecting terms of second order in M
a
we nd
p
2,2
y
= 0,
and we conclude p
2,2
must be independent of y. Similarly, collecting all second-order
terms in M
a
, we nd that the X-component of the momentum equation (??) reduces to
2i
0
u
2,2
+
1
2
i
1
u
1
+
1
2
0
u
1
u
1
X
+
1
2
0
v
1
u
1
y
=
dp
2,2
dX
+
0
W
2
o
_
2
u
2,2
y
2
+
1
2
y
_
0
u
1
y
_
_
, (4.112)
where we substituted (3.26) and (4.104). Rearranging terms we can rewrite (4.112) as
u
2,2
2
,2
2
u
2,2
y
2
=
i
2
0
dp
2,2
dX
+ A, (4.113)
where A, a source term arising from products of rst-order terms, is known and given
by
A =
i
4
0
_
i
1
u
1
+
0
u
1
u
1
X
+
0
v
1
u
1
y
0
W
2
o
y
_
0
u
1
y
_
_
.
Thermoacoustics in two-dimensional pores with variable cross-section 63
Using the variation-of-constants formula [19], we can write a solution as follows:
u
2,2
=
iF
,2
2
0
dp
2,2
dX
+
(A), u
2,2
) =
i(1 f
,2
)
2
0
dp
2,2
dX
+
(A), (4.114)
where
j
( f ) ( j = , k) is the variation-of-constants formula that is chosen such that
j
( f )[
y=1
g
= 0,
j
( f ) :=
S
j
j,2
_
y
1
g
f (X, )C
j
(X, ) d
C
j
j,2
_
y
1
g
f (X, )S
j
(X, ) d
21
g
j,2
_
S
+
j
f C
j
) C
+
j
f S
j
)
_
S
j
S
j
C
j
/C
j
S
+
j
S
j
C
+
j
/C
j
, (4.115a)
C
j
:= cosh(
j,2
y), C
j
:= cosh(
j,2
1
g
), (4.115b)
S
j
:= sinh(
j,2
y), S
j
:= sinh(
j,2
1
g
), (4.115c)
and
j
( f ) :=
j
( f )) . Furthermore, for the solid we dene
s
( f ) :=
S
s
s,2
_
y
0
f (X, )C
s
(X, ) d
C
s
s,2
_
y
0
f (X, )S
s
(X, ) d
+
1
s
C
s
s,2
_
f
_
S
s
s
C
s
C
s
__
s,2
d1
t
dX
dT
0
dX
_
S
s
s
C
s
C
s
_
, (4.116a)
C
s
:= cosh(
s,2
y
), C
s
:= cosh(
s,2
1
s
), (4.116b)
S
s
:= sinh(
s,2
y
), S
s
:= sinh(
s,2
1
s
), (4.116c)
satisfying
s
( f )[
y
=1
s
= 0 and
s
( f )
y
[
y
=0
=
d1
t
dX
dT
0
dX
. Additionally we introduce
the averaged functions
s
( f ) :=
s
( f ))
s
.
Next we turn to the temperature equation. Substituting our expansions into (4.4) and
(4.5) and collecting the terms of second order in M
a
, we nd after some manipulation
that T
2,2
and T
s
2,2
can be found from
T
2,2
2
k,2
2
T
2,2
2
y
= B
1
4
2
0
dT
0
dX
dp
2,2
dX
F
,2
+
T
0
0
C
p
p
2,2
, (4.117a)
T
s
2,2
2
s,2
2
T
s
2,2
2
y
= C, (4.117b)
64 4.6 Second harmonics
where B and C are known and given by
4B = iT
1
p
1
+ T
0
u
1
dp
1
dX
iC
p
1
T
1
2
0
C
p
(A)
dT
0
dX
0
u
1
T
1
X
1
u
1
dT
0
dX
0
v
1
T
1
y
+
2N
2
L
y
_
K
1
T
1
y
_
+ 2
d
dX
_
K
0
dT
0
dX
_
+
0
W
2
o
_
u
1
y
_
2
,
4C =
2N
2
s
_
y
_
K
s
1
T
s
1
y
_
+ 2
d
dX
_
K
s
0
dT
0
dX
__
.
Using (4.115) and (4.116) and imposing the boundary conditions given in (4.7b) and
(4.7d), we can write
T
2,2
=
k
(B) +
T
0
F
k,2
0
C
p
p
2,2
F
k,2
P
r
F
,2
4
2
(1 P
r
)
0
dT
0
dX
dp
2,2
dX
+ T
+
b
2,2
(1 F
+
k,2
)
+ T
b
2,2
(1 F
k,2
), (4.118a)
T
s
2,2
=
s
(C) + T
b
2,2
_
1 F
s,2
_
, (4.118b)
where T
+
b
2,2
= T
2,2
[
+
g
and T
b
2,2
= T
2,2
[
g
are yet to be determined. Collecting the second-
order terms in the remaining boundary condition (4.7c) and substituting (4.28), we can
write
K
0
T
2,2
y
K
s
0
T
s
2,2
y
= K
0
_
K
1
K
0
K
s
1
K
s
0
_
T
1
y
1
g
X
(K
0
K
s
)
dT
0
dX
if y = 1
g
and y
= 1
s
. (4.119)
Applying these conditions, we nd (cf. (4.33))
T
b
2,2
=
s,2
(1 +T
2,2
)
1 +
s,2
_
D
+
T
0
0
C
p
p
2,2
1
4
2
0
1 f
,2
/f
k,2
1 P
r
dT
0
dX
dp
2,2
dX
_
, (4.120)
where D
can be computed from the lower-order terms as
D
=
1
K
0
1
g
2
k,2
f
k,2
_
(K
0
K
s
0
)
d1
g
dX
dT
0
dX
1
2
K
0
_
K
1
K
0
K
s
1
K
s
0
_
T
1
y
y=1
g
K
0
k
(B)
y
y=1
g
K
s
0
s
(C)
y
=1
s
_
Thermoacoustics in two-dimensional pores with variable cross-section 65
and T
2,2
is given by
T
+
2,2
=
(
+
s,2
s,2
) cosh(2
k,2
1
g
)
(1 +
+
s,2
)(1 +
s,2
+ (
s,2
1) cosh(2
k,2
1
g
) + (
+
s,2
s,2
) cosh(2
k,2
1
g
)
,
T
2,2
=
(
s,2
+
s,2
) cosh(2
k,2
1
g
)
(1 +
s,2
)(1 +
+
s,2
+ (
+
s,2
1) cosh(2
k,2
1
g
) + (
s,2
+
s,2
) cosh(2
k,2
1
g
)
.
Using relations (A.5) and (A.8) and substituting T
2,2
we can derive the following
relation for the second-harmonic density uctuations:
2,2
=
1
c
2
_
1 + ( 1)(1 F
k,2
)
p
2,2
+
F
k,2
P
r
F
,2
4
2
(1 P
r
)
dT
0
dX
dp
2,2
dX
0
T
+
b
2,2
(1 F
+
k,2
)
0
T
b
2,2
(1 F
k,2
)
0
k,B
1
2
1
T
1
(4.121)
=
1
c
2
_
1 + ( 1)
_
1 F
k,2
+
s,2
(1 +T
+
2,2
)
1 +
+
s,2
(1 F
+
k,2
)
s,2
(1 +T
2,2
)
1 +
s,2
(1 F
k,2
)
__
p
2,2
+
_
F
,2
+
F
k,2
F
,2
(1 P
r
)
+
+
s,2
(1 +T
+
2,2
)
(1 f
,2
/f
k,2
)(1 F
+
k,2
)
(1 P
r
)(1 +
+
s,2
)
+
s,2
(1 +T
2,2
)
(1 f
,2
/f
k,2
)(1 F
k,2
)
(1 P
r
)(1 +
s,2
)
_
4
2
dT
0
dX
dp
2,2
dX
+
s,2
D
+
1 +
+
s,2
+
s,2
D
1 +
s,2
+
k
(B) +
1
2
0
T
1
_
. (4.122)
As a result we nd
2,2
) =
1
c
2
_
1 +
1
1 +
s,2
f
k,2
_
p
2,2
+
_
1 f
,2
+
f
,2
f
k,2
(1 P
r
)(1 +
s,2
)
_
4
2
dT
0
dX
dp
2,2
dX
+
s,2
D
+
1 +
+
s,2
+
s,2
D
1 +
s,2
+
k
(B) +
1
2
0
1
T
1
)
_
, (4.123)
where
s,2
is given by
1
1 +
s,2
=
1
2
_
1
+
s,2
T
+
2,2
1 +
+
s,2
+
1
s,2
T
2,2
1 +
s,2
_
(4.124a)
= 1
1
2
_
+
s,2
(1 +T
+
2,2
)
1 +
+
s,2
+
s,2
(1 +T
2,2
)
1 +
s,2
_
. (4.124b)
Finally, we turn to the continuity equation (4.1). Expanding the variables in powers
of M
a
and collecting terms of second order in M
a
, we nd
2i
2,2
+
X
(
0
u
2,2
) +
0
v
2,2
y
=
X
(
1
u
1
)
y
(
1
v
1
). (4.125)
66 4.6 Second harmonics
We can use this equation to express v
2,2
in terms of u
2,2
,
2,2
, and the known lower-order
quantities,
v
2,2
=
1
0
_
y
0
_
2i
2,2
+
X
(
0
u
2,2
) +
1
2
X
(
1
u
1
)
_
d y
1
2
0
v
1
, (4.126)
where we applied the boundary condition that v
2,2
vanishes at
g
.
Note that v also vanishes at the boundary
+
g
. Therefore, substituting (4.114) for u
2,2
,
multiplying with 2i, averaging over a cross-section, and using the Leibniz rule, we
obtain the following equation as a consistency relation for v
2,2
:
4
2
2,2
) +
1
1
g
d
dX
_
1
g
(1 f
,2
)
dp
2,2
dX
_
=
2i
1
g
X
(1
g
[
0
(A) +
1
u
1
)]).
After substituting (4.123), we obtain
4
2
c
2
_
1 +
1
1 +
s,2
f
k,2
_
p
2,2
+
f
,2
f
k,2
(1 P
r
)(1 +
s,2
)
dT
0
dX
dp
2,2
dX
+ (1 f
,2
)
dT
0
dX
dp
2,2
dX
+
1
1
g
d
dX
_
1
g
(1 f
,2
)
dp
2,2
dX
_
= 2i
0
E, (4.127)
where E is a source term arising from products of rst-order or zeroth-order quantities
and is given by
E := 2i
_
+
s,2
D
+
1 +
+
s,2
+
s,2
D
1 +
s,2
+
k,B
+
1
2
0
1
T
1
)
_
0
1
g
X
_
1
g
[
0
(A) +
1
u
1
)]
_
. (4.128)
Inserting (4.43), we obtain a wave equation for the second pressure harmonic
4
2
c
2
_
1 +
1
1 +
s,2
f
k,2
_
p
2,2
+
( f
,2
f
k,2
)
(1 P
r
)(1 +
s,2
)
dT
0
dX
dp
2,2
dX
+
0
1
g
d
dX
_
1
g
1 f
,2
0
dp
2,2
dX
_
= 2i
0
E. (4.129)
Apart from the source term E this equation has a similar structure as the wave equation
derived in (4.44) for the rst pressure harmonic.
Combining (4.114) and (4.129) we derive the following two coupled ordinary differ-
Thermoacoustics in two-dimensional pores with variable cross-section 67
ential equations for p
2,2
and q
2,2
:= u
2,2
)
, A
dq
2,2
dX
=a
3,2
p
2,2
+
_
a
4,2
dT
0
dX
1
1
g
d1
g
dX
_
q
2,2
+ E, (4.130a)
dp
2,2
dX
=a
5,2
q
2,2
, (4.130b)
where
a
3,2
:=
2i
0
c
2
_
1 +
( 1) f
k,2
1 +
s,2
_
, (4.131a)
a
4,2
:=
( f
,2
f
k,2
)
(1 P
r
)(1 +
s,2
)(1 f
,2
)
, (4.131b)
a
5,2
:=
2i
0
1 f
,2
. (4.131c)
Since all the zeroth-order and rst-order terms are known from the previous sections,
we can compute subsequently A, B, C, D, and E. Next the system (4.130) can be inte-
grated to determine p
2,2
and u
2,2
), provided appropriate boundary conditions are im-
posed. Note that the gravitational effect only affects the streaming terms via the source
function f in equation (4.104), and does not appear in the equations for the rst and
second harmonics.
4.7 Power
To analyze the performance of thermoacoustic systems it is important to have a clear
understanding of the energy ows in the system and their interplay. In this section we
will elaborate further on the concept of total and acoustic power.
4.7.1 Acoustic power
The time-averaged acoustic power
W
2
is given by
W
2
=
1
2
1
g
Re [p
1
u
1
)] . (4.132)
Thus it follows from(3.25) that the time-averagedacoustic power d
W
2
used or produced
in a segment of length dX can be found from
d
W
2
dX
=
d
dX
_
1
g
Re
_
p
1
e
it
_
Re
_
u
1
)e
it
_
)
_
. (4.133)
Using (3.25), we nd to leading order
d
W
2
dX
=
1
2
d1
g
dX
Re [p
1
u
1
)] +
1
g
2
Re
_
p
1
du
1
)
dX
+u
1
)
dp
1
dX
_
. (4.134)
68 4.7 Power
Substituting (4.45a) and (4.45b) into (4.134) we nd
d
W
2
dX
=
1
g
2
1 P
r
dT
0
dX
Re
_
f
k
f
(1 f
)(1 +
s
)
p
1
u
1
)
_
1
g
2
( 1)
0
c
2
Im
_
f
k
1 +
s
_
[p
1
[
2
1
g
2
0
Im[f
]
[1 f
[
2
[u
1
)[
2
. (4.135)
The rst term contains the temperature gradient dT
0
/dX and is called the sink or source
term. It will either absorb (refrigerator) or produce (prime mover) acoustic power de-
pending on the magnitude of the temperature gradient along the stack. This term is
the unique contribution to thermoacoustics. The last two terms are the viscous and
thermal-relaxation dissipation terms, respectively. These two terms arise due to the
interaction with the wall, and have a dissipative effect in thermoacoustics.
The sink/source term, which we dene as
W
s
2
, is of greatest interest in thermoacous-
tic engines and refrigerators. For interpretation we will neglect viscosity and set = ,
so that f
= P
r
=
s
= 0,
d
W
s
2
dX
=
2
dT
0
dX
_
Re [ f
k
] Re [p
1
u
1
)] + Im [f
k
] Im[p
1
u
1
)]
_
. (4.136)
In a standing-wave system Im(p
1
u
1
)) is large and therefore Im(f
k
) is important.
Fig. 4.4 shows that the maximal value is attained for N
L
close to 1. In the case of a
traveling-wave system Re (p
1
u
1
)) is large and Re ( f
k
) is important. Fig. 4.4 shows
that Re ( f
k
) reaches its maximal value for N
L
1. This motivates why commonly
stacks (N
L
1) are used in standing-wave systems and regenerators (N
L
1) in
traveling-wave systems.
0 1 2 3 4 5 6
0.5
0
0.5
1
N
L
f
k
real part
imaginary part
Figure 4.4: Real and imaginary part of f
k
, plotted as a function of the Lautrec number N
L
.
To test the signicance of the dissipation terms we can investigate how (4.135) be-
haves for small N
L
or W
o
. To optimize the thermoacoustic effect one would like to
maximize the source term and minimize the dissipation terms. If we consider an ideal
Thermoacoustics in two-dimensional pores with variable cross-section 69
parallel-plate stack with
s
= 0, then
d
W
2
dX
=
1
g
2
1 P
r
dT
0
dX
Re
_
f
k
f
(1 f
)
p
1
u
1
)
_
1
g
2
( 1)
0
c
2
Im[f
k
] [p
1
[
2
1
g
2
0
Im[f
]
[1 f
[
2
[u
1
)[
2
. (4.137)
For small W
o
and N
L
one can show that ( f
k
f
)/(1 f
) = O(1), Im( f
k
) = O(N
2
L
),
Im( f
) = O(W
2
o
) and [1 f
[
2
= O(W
4
o
). Therefore, it follows that the acoustic power
behaves as
d
W
2
dX
=
d
W
s
2
dX
d
W
k
2
dX
d
W
2
dX
= O(1) O
_
N
2
L
_
O
_
1
W
2
o
_
, W
o
, N
L
1,
(4.138)
where
W
k
2
and
W
2
denote the thermal relaxation dissipation and viscous dissipation,
respectively.
Unsurprisingly, equation (4.138) shows that the dissipation in a regenerator (N
L
1, W
o
1) is dominated by viscous dissipation and in a stack (N
L
= O(1), W
o
= O(1))
by thermal relaxation dissipation. In a regenerator there is perfect thermal contact, but
very small pores and therefore viscous dissipation will be dominant. In a stack, on the
other hand, there is imperfect thermal contact, but wider pores. Thus thermal relaxation
dissipation is dominant here. Dissipation is usually undesirable, so N
L
should be chosen
carefully.
4.7.2 Total power
In equation (4.66) we derived an expression for the total power
H
2
,
H
2
=
M
2
C
p
_
T
0
T
re f
_
+
1
2
1
g
Re
_
p
1
u
1
_
1 T
0
f
k
f
(1 + P
r
)(1 +
s
)(1 f
)
__
+1
g
0
C
p
[u
1
)[
2
2(1 P
r
)[1 f
[
2
dT
0
dX
Im
_
f
+
(1 +
s
f
/f
k
)( f
k
f
)
(1 + P
r
)(1 +
s
)
_
_
K
0
1
g
+K
s
0
1
s
_
S
2
k
2
dT
0
dX
. (4.139)
Combining (4.53) and (4.54), we can write the total power as a sum of the acoustic power
W, the hydronamic entropy ux
Q, the heat ow
Q
m
due to a nett mass ux, and the
70 4.7 Power
heat ow
Q
loss
due to conduction down a temperature gradient,
H
2
=
1
g
2
Re [p
1
u
1
)] +
1
2
0
T
0
1
g
Re [s
1
u
1
)] +
M
2
C
p
(T
0
T
re f
)
_
K
0
1
g
+K
s
0
1
s
_
S
2
k
2
dT
0
dX
=:
W
2
+
Q
2
+
Q
m,2
Q
loss,2
. (4.140)
To illustrate the behavior of the thermoacoustic devices, idealized energy ows are
depicted in gure 4.5. The situation is ideal in the sense that heat conduction and mass
streaming are neglected, so that
Q
m,2
=
Q
loss,2
= 0.
Figure 4.5(a) shows a refrigerator that is thermally insulated from the surroundings
except at the heat exchangers where heat is exchanged with the environment. On the
left acoustic power is supplied, possibly by means of a speaker or some other source
of sound. Part of the acoustic power is used to sustain the standing or traveling wave
against thermal and viscous dissipation, and part is used for the thermoacoustic effect
to transport heat from the cold to the hot heat exchanger. This can be used for cooling
at the the cold heat exchanger or heating at the hot heat exchanger.
Figure 4.5(b) tells a similar story for the prime mover. A large temperature differ-
ence is imposed across the stack, by supplying heat at the hot heat exchanger, or by
extracting heat at the cold heat exchanger. As a result acoustic power is generated, part
of which is dissipated due to viscous interaction with the resonator wall. The nett result
can then be used as a sound source for some external device, possibly even to drive a
thermoacoustic refrigerator [78].
If we apply the conservation of energy to a control volume surrounding each heat
exchanger, then we can relate the cooling and heating power to the total power and the
acoustic power as follows:
refrigerator:
_
Q
C
=
H,
Q
H
=
W
H,
(4.141)
prime mover:
_
Q
C
=
W +
H,
Q
H
=
H.
(4.142)
Thermoacoustics in two-dimensional pores with variable cross-section 71
T
H
T
C
W
H
Q
H
Q
C
T
H
T
C
Q
H
Q
C
(a) Refrigerator
T
H
T
C
Q
H
Q
C
T
H
T
C
Q
H
Q
C
(b) Prime mover
Figure 4.5: Schematic and idealized illustration of the total power
H (solid line), the acoustic
power
W (dashed line) and the hydronamic energy ux
Q (dotted line) in and around a parallel-
plate stack, insulated everywhere except at the heat exchangers, positioned in (a) a thermoacous-
tic refrigerator and (b) a thermoacoustic prime mover. In (a) a small temperature difference is
maintained across the stack and acoustic power is absorbed by the stack; in (b) a large temper-
ature difference is maintained and acoustic power is produced. The discontinuities in
H
2
arise
due to heat transfer at the heat exchangers.
72 4.7 Power
Chapter 5
Thermoacoustics in
three-dimensional pores with
slowly varying cross-section
Although a two-dimensional model can give a lot of information, there are many practi-
cal devices that require a three-dimensional analysis because its resonator tube or stack
pores have non-trivial three-dimensional shapes. These can be cylindrical, rectangular,
or triangular pores, pin arrays, wired mesh, or some random porous material. In this
chapter we consider shapes of the type shown in gure 5.1: narrow three-dimensional
pores with cross-sections that may vary slowly in longitudinal direction [61].
solid
gas
r
X
1
g
(X, )
1
s
(X, )
t
Figure 5.1: Longitudinal cut of a three-dimensional pore with slowly varying cross-section. At
position X and angle , the radius of the gas and solid is given by 1
g
(X, ) and 1
s
(X, ),
respectively.
The analysis in this chapter differs from the analysis in chapter 4 in the sense that
there is a nontrivial dependence on the third coordinate, which complicates the compu-
tation of the transverse variations. It will be necessary to determine Greens functions
for the Poissons and modied Helmholtz equation. Moreover, two additional integral
equations need to be solved, unless the boundary condition (3.23c) is replaced by the
condition of constant wall temperature, which is quite accurate for most purposes.
74 5.1 Acoustics
5.1 Acoustics
We follow an approach similar to that in the previous chapters. First we introduce some
auxiliary functions. As in the two-dimensional case, we dene
,
k
and
s
as follows:
= (1 + i)
_
0
2
0
W
o
, (5.1)
k
= (1 + i)
0
K
0
C
p
N
L
, (5.2)
s
= (1 + i)
s
0
K
s
0
C
s
N
s
. (5.3)
Furthermore, we determine F
j
( j = , k) from
F
j
2
j
F
j
= 1 in /
g
, (5.4a)
F
j
= 0 on
g
, (5.4b)
and dene f
j
:= 1 F
j
) ( j = , k). Note that for two-dimensional pores these deni-
tions match the expressions given in the previous chapter.
Arnott et al. [5] follow a similar approach, although a slightly different notation is
adopted; F(x;
j
) in stead of F
j
(x). Also there is an additional minus-sign in (5.4a) be-
cause they assume a time-dependence of the form e
it
, whereas we follow the conven-
tional notation with a positive sign as used by Rott [115] and Swift [131].
We start from the momentum equation and expand the uid variables in powers of
M
a
as shown in (3.24). Substituting the expansions into the transverse components of
the momentum equation (3.18), putting
2
= M
2
a
, and keeping terms up to rst order
in M
a
we nd
0 =
p
0
M
a
p
1
+ o(M
a
).
Collecting the leading-order terms in M
a
we nd we nd that
p
0
= 0, so that p
0
is a
function of X only. Furthermore, collecting the rst-order terms in M
a
, we additionally
nd that
p
1
= 0, so that p
1
is also a function of X only.
Next we turn to the X-component of the momentum equation (3.17), which neglect-
ing higher-order terms in M
a
changes into
i M
a
0
u
1
=
dp
0
dX
M
a
dp
1
dX
+ M
a
W
2
o
(
0
u
1
) + o(M
a
).
To leading order we nd that dp
0
/dX = 0 and therefore p
0
is constant. Next assume
that the mean temperature T
0
is a function of X only. Below we will show that this
is indeed the case. As a result we also nd that
0
=
0
(X) and K = K
0
(X). Then,
collecting the terms of rst order in M
a
, we nd that u
1
satises
u
1
=
i
0
dp
1
dX
+
1
u
1
. (5.5)
Thermoacoustics in three-dimensional pores with variable cross-section 75
With the help of equations (5.4), we can integrate (5.5) subject to v[
g
= 0 and write u
1
and dp
1
/dX as
u
1
=
iF
0
dp
1
dX
and u
1
) =
i(1 f
0
dp
1
dX
. (5.6)
Next we turn to the temperature equation. Substituting our expansions into (3.20)
and (3.21) and keeping terms up to rst order in M
a
, we nd
M
a
0
C
p
(iT
1
+ v
1
T
0
) = i M
a
T
0
p
1
+
2N
2
L
_
K
0
(T
0
+ M
a
T
1
)
_
,
i M
a
s
0
C
s
T
s
1
=
2
2N
2
s
_
K
s
0
_
T
s
0
+ M
a
T
s
1
_
_
.
To leading order this reduces into
2
T
0
=
2
T
s
0
= 0. An obvious solution, satisfying
the boundary conditions given in (3.23), is that T
s
0
and T
0
are equal and independent
of x
. In view of the thermodynamic relation (A.8) it also holds that
0
and
s
0
are
independent of x
.
Next, collecting the terms of rst order in M
a
, we nd that T
1
and T
s
1
can be obtained
from
T
1
+
1
0
dT
0
dX
dp
1
dX
F
T
0
0
C
p
p
1
=
1
2
k
T
1
, (5.7a)
T
s
1
=
1
2
s
T
s
1
, (5.7b)
where we substituted expression (5.6) for u
1
.
To solve the temperature from (5.7) we rst need to introduce some additional aux-
iliary functions. In [5] a solution is obtained to (5.7) by assuming that the wall temper-
ature T
s
does not depend on time, which allows a solution as a combination of F
and
F
k
-functions. However, with the boundary conditions given in (3.23), this approach will
not work here. Assume for now the boundary function g := T
1
[
g
is known and choose
g
p
and g
u
such that
g = g
p
T
0
0
c
2
p
1
g
u
2
(1 P
r
)
0
dT
0
dX
dp
1
dX
.
We can now write for the temperature
T
1
(x) =
T
0
F
kp
0
C
p
p
1
F
ku
P
r
F
2
(1 P
r
)
0
dT
0
dX
dp
1
dX
, (5.8)
T
s
1
(x) =
T
0
0
C
p
(1 F
sp
)p
1
1 F
su
2
(1 P
r
)
0
dT
0
dX
dp
1
dX
, (5.9)
76 5.1 Acoustics
where F
k j
( j = p, u) satises
F
k j
2
k
F
k j
= 1 in /
g
, (5.10a)
F
k j
= g
j
on
g
, (5.10b)
and F
s j
( j = p, u) is found from
F
s j
2
s
F
s j
= 1 in /
s
, (5.11a)
F
s j
= 1 g
j
on
g
, (5.11b)
F
s j
n
= 0 on
t
. (5.11c)
The standardway of solving such boundary value problems is making use of the Greens
functions for the given Helmholtz equations on a cross-section with appropriate bound-
ary conditions. In Appendix C we will show how the g
j
and F
i j
functions can be deter-
mined using Greens functions.
Using relations (A.5) and (A.8) and substituting T
1
we can derive the following rela-
tion for the acoustic density uctuations:
1
=
1
c
2
_
( 1)F
kp
_
p
1
+
(F
ku
P
r
F
2
(1 P
r
)
dT
0
dX
dp
1
dX
. (5.12)
Finally, we turn to the continuity equation (3.16). Expanding the variables in powers
of M
a
and keeping terms up to rst order in M
a
, we nd
i M
a
1
+ M
a
X
(
0
u
1
) + M
a
1
= 0. (5.13)
Next we substitute (5.6). First note that because of the divergence theorem
_
/
g
dS =
_
g
v
n d = 0,
since v[
g
= 0. Therefore, averaging (5.13) over a cross-section and multiplying with
i, we obtain the following equation as a consistency relation for v
1
:
1
) =
1
A
g
d
dX
_
A
g
(1 f
)
dp
1
dX
_
i
A
g
dA
g
dX
0
u
1
g
=
1
A
g
d
dX
_
A
g
(1 f
)
dp
1
dX
_
. (5.14)
Thermoacoustics in three-dimensional pores with variable cross-section 77
After substituting (5.12) and putting f
j
= 1 F
j
) ( j = , kp, ku), we obtain
2
c
2
_
1 + ( 1) f
kp
_
p
1
+
( f
f
ku
)
1 P
r
dT
0
dX
dp
1
dX
+(1 f
)
dT
0
dX
dp
1
dX
+
1
A
g
d
dX
_
A
g
(1 f
)
dp
1
dX
_
= 0.
Eventually using
0
d
dX
_
1
0
_
=
1
0
d
0
dX
=
1
0
T
0
dT
0
dX
=
dT
0
dX
, (5.15)
we obtain the dimensionless equivalent of Rotts wave equation for general porous me-
dia
2
c
2
_
1 + ( 1) f
kp
_
p
1
+
( f
f
ku
)
1 P
r
dT
0
dX
dp
1
dX
+
0
A
g
d
dX
_
A
g
1 f
0
dp
1
dX
_
= 0. (5.16)
We can now combine (5.6) and (5.16) to nd a coupled system of rst order differen-
tial equations for p
1
and u
1
). From (5.6) we nd
0
A
g
d
dX
_
A
g
1 f
0
dp
1
dX
_
= i
0
A
g
d
dX
(A
g
u
1
)). (5.17)
Substituting this result into (5.16) and repeating equation (5.6), we nd that u
1
) and p
1
are found from
du
1
)
dX
=a
3
p
1
+
_
a
4
dT
0
dX
1
A
g
dA
g
dX
_
u
1
)), (5.18a)
dp
1
dX
=a
5
u
1
), (5.18b)
where
a
3
:=
i
0
c
2
_
1 + ( 1) f
kp
_
,
a
4
:=
( f
f
ku
)
(1 P
r
)(1 f
)
,
a
5
:=
i
0
1 f
.
To complete the system of equations, it still remains to nd an equation for the mean
temperature T
0
. The next section explains how this can be done.
78 5.2 Mean temperature
5.2 Mean temperature
As in Section 4.3 we will use the conservation of energy to determine T
0
as a consistency
condition for the second-order temperature T
2,0
.
Putting
2
= M
2
a
, we can rewrite (3.22) as follows:
t
_
1
2
([u[
2
+M
2
a
[v
[
2
) +
_
=
X
_
1
2
u([u[
2
+M
2
a
[v
[
2
) +uh M
2
a
K
2N
2
L
T
X
_
_
1
2
v
([u[
2
+M
2
a
[v
[
2
) +v
h
K
2N
2
L
T
W
2
o
u
u
_
+ T +
M
2
a
F
r
(ub
x
+
M
a
v
) , (5.19)
with
T = M
2
a
W
2
o
_
u
u
X
+M
2
a
v
X
+ v
u
_
+
W
2
W
2
o
_
v
+ v
v
_
+
W
2
v
_
_
.
If there is an average heat ux
F to the boundary, then the left hand side of this equation
will reduce to
F after averaging in time. Consequently, on expanding in powers of M
a
and keeping terms up to second order, we can neglect gravitational terms and the T -
term and nd
X
_
M
2
a
0
u
1
h
1
+ M
2
a
h
0
m
2
M
2
a
K
0
2N
2
L
dT
0
dX
_
+
_
M
2
a
0
v
1
h
1
+ M
2
a
h
0
m
2
M
2
a
K
0
2N
2
L
T
2,0
M
2
a
2N
2
L
K
1
T
1
M
2
a
0
W
2
o
u
1
u
1
_
= M
2
a
F
2
+ o(M
2
a
),
where m
2
and m
2
are the components in longitudinal and transverse directions of the
second-order time-averaged mass ux m
2
,
m
2
:=
0
(v
2,0
+ Re
_
v
2,2
e
2it
_
) + Re
_
1
e
it
_
Re
_
v
1
e
it
_
=
0
v
2,0
+
1
2
Re [
1
v
1
] .
Plugging in relation (3.25) and rearranging terms we nd
K
0
T
2,0
+
1
2
Re [K
T
1
] +
d
dX
_
K
0
dT
0
dX
_
=
N
2
L
X
(
0
Re [u
1
h
1
] + 2h
0
m
2
)
+
N
2
L
0
Re
_
v
1
h
1
+ 2h
0
m
W
2
o
Re [u
u
1
]
_
2N
2
L
F
2
. (5.20)
Thermoacoustics in three-dimensional pores with variable cross-section 79
Similarly we can show in the solid that (3.21) reduces to
K
s
0
T
s
2,0
+
1
2
Re
_
K
s
1
T
s
1
+
d
dX
_
K
s
0
dT
0
dX
_
= 0. (5.21)
We will now use the ux condition (3.23c) to derive a differential equation for T
0
.
Time-averaging and expanding (3.23c) in powers of M
a
and collecting the second order
terms in M
a
we nd
_
K
0
T
2,0
+
1
2
Re [K
T
1
] K
s
0
T
s
2,0
1
2
Re
_
K
s
1
T
s
1
o
g
=
_
K
s
0
K
0
_
dT
0
dX
o
g
X
, o
g
= 0.
This condition can be rewritten as
_
K
0
T
2,0
+
1
2
Re [K
T
1
] K
s
0
T
s
2,0
1
2
Re
_
K
s
1
T
s
1
_
n
=
K
0
K
s
0
[
o
g
[
1
g
X
dT
0
dX
=
(K
0
K
s
0
)1
g
_
1
2
g
+ (1
g
/)
2
1
g
X
dT
0
dX
, o
g
= 0, (5.22)
where n
:=
o
g
/(
o
g
) is the outward unit normal vector to
g
. Similarly, since
n
:=
o
t
/(
o
t
) is the outward unit normal vector to
t
, we nd from (3.23d)
K
s
0
T
s
2,0
n
+
1
2
Re
_
K
s
1
T
s
1
=
K
s
0
1
t
_
1
2
t
+ (1
t
/)
2
1
t
X
dT
0
dX
, o
t
= 0. (5.23)
Now on the one hand, by applying the divergence theorem, substituting the ux condi-
tions (5.22) and (5.23), and noting that A
=
1
2
_
2
0
1
2
d and d = (1
2
+ (1/)
2
)
1/2
d,
80 5.2 Mean temperature
we nd
_
/
g
_
K
0
T
2,0
+
1
2
Re [K
T
1
] +
d
dX
_
K
0
dT
0
dX
__
dS
+
_
/
s
_
K
s
0
T
s
2,0
+
1
2
Re
_
K
s
1
T
s
1
+
d
dX
_
K
s
0
dT
0
dX
__
dS
=
_
g
_
K
0
T
2,0
+
1
2
Re [K
T
1
] K
s
0
T
s
2,0
2
Re
_
K
s
1
T
s
1
_
n
d
+
_
t
_
K
s
0
T
s
2,0
+
1
2
Re
_
K
s
1
T
s
1
_
n
d
+A
g
d
dX
_
K
0
dT
0
dX
_
+A
s
d
dX
_
K
s
0
dT
0
dX
_
= (K
0
K
s
0
)
dT
0
dX
_
2
0
1
g
1
g
X
d +K
s
0
dT
0
dX
_
2
0
1
t
1
t
X
d
+A
g
d
dX
_
K
0
dT
0
dX
_
+A
s
d
dX
_
K
s
0
dT
0
dX
_
=
d
dX
_
_
K
0
A
g
+K
s
0
A
s
_
dT
0
dX
_
. (5.24)
On the other hand, combining (5.20) and (5.21), applying the divergence theorem
and using v[
g
= 0, we also have
_
/
g
_
K
0
T
2,0
+
1
2
Re [K
T
1
] +
d
dX
_
K
0
dT
0
dX
__
dS
+
_
/
s
_
K
s
0
T
s
2,0
+
1
2
Re
_
K
s
1
T
s
1
+
d
dX
_
K
s
0
dT
0
dX
__
dS
=
N
2
L
_
/
g
d
dX
_
0
Re [u
1
h
1
] + 2h
0
m
2
_
dS
+
N
2
L
_
/
g
_
0
Re [v
1
h
1
] + 2h
0
m
0
W
2
o
Re [u
u
1
]
_
2N
2
L
F
2
_
dS
=
N
2
L
d
dX
_
A
g
0
Re [u
1
h
1
)] + 2h
0
M
2
_
2
d
H
2
dX
, (5.25)
where we put
M
2
:= A
g
m
2
) and
F =:
1
A
g
d
H
dX
, . Finally, equating the right hand sides of
equations (5.24) and (5.25), we get
d
dX
_
2h
0
M
2
+ A
g
0
Re [h
1
u
1
)] (K
0
A
g
+K
s
0
A
s
)
S
2
k
dT
0
dX
_
=
d
H
2
dX
. (5.26)
The quantity within the big brackets is
H
2
, the time-averaged total power (or energy
ux) along X. In steady state, for a cyclic refrigerator or prime mover without heat
ows to the surroundings (
F = 0),
H will be constant.
Thermoacoustics in three-dimensional pores with variable cross-section 81
Substituting the thermodynamic expressions (A.7) and (A.9),
dh = Tds +
1
dp = C
p
dT +
1
(1 T)dp,
into (5.26), we nd
H
2
A
g
= h
0
M
2
A
g
+
1
2
0
C
p
Re [T
1
u
1
)] +
1
2
(1 T
0
)Re [p
1
u
1
)]
_
K
0
+K
s
0
A
s
A
g
_
S
2
k
2
dT
0
dX
. (5.27)
Next we will show that
[F
[
2
) = Re [F
)] , F
k j
F
) =
F
k j
) + P
r
F
) f
b j
1 + P
r
, j = u, p, (5.28)
where
f
b j
:=
1
A
g
g
F
k j
d, j = u, p.
Dene
I
1
:= F
k j
F
), I
2
:=
F
k j
). (5.29)
It follows from (5.10) and (5.4) that
F
= 1 +
1
, (5.30)
F
k j
= 1 +
1
2
k
F
k j
, j = u, p. (5.31)
Using (5.31), the divergence theorem, and the boundary condition F
= 0 on
g
, we can
rewrite I
1
as follows:
I
1
=
1
A
g
_
/
g
F
_
1 +
1
2
k
F
k j
_
dS
= F
) +
1
A
g
2
k
_
/
g
_
F
F
k j
_
dS
1
A
g
2
k
_
/
g
F
k j
dS
= F
) +
1
A
g
2
k
_
g
_
F
F
k j
_
n
d
I
2
2
k
= F
)
I
2
2
k
. (5.32)
82 5.2 Mean temperature
In the same way, substituting (5.30) rather than (5.31) and noting (
)
2
=
2
, we nd
I
1
= F
k j
) f
b j
+
I
2
, (5.33)
where the extra term f
b j
arises because F
k j
does not necessarily vanish on the interface
g
. Eliminating the common term I
2
from equations (5.32) and (5.33), we nd
I
1
=
F
k j
) + P
r
F
) f
b j
1 + P
r
, (5.34)
as claimed in (5.28). Replacing F
k j
by F
, we can repeat the same analysis to prove the
rst claim of (5.28).
Integrating (A.9), we also nd that
h
0
= C
p
(T
0
T
re f
),
where T
re f
is some reference temperature. Substituting (5.8) into (5.27) and using (5.28)
we nd after some manipulation
H
2
A
g
=
1
A
g
M
2
C
p
_
T
0
T
re f
_
+
1
2
Re
_
p
1
u
1
_
1 T
0
f
kp
f
+ f
bp
(1 + P
r
)(1 f
)
__
+
0
C
p
[u
1
)[
2
2(1 P
r
)[1 f
[
2
dT
0
dX
Im
_
f
+
f
ku
f
+ f
bu
1 + P
r
_
_
K
0
+K
s
0
A
s
A
g
_
S
2
k
2
dT
0
dX
. (5.35)
This expression represents the total power along the X-direction (wave direction) in
terms of T
0
, p
1
, u
1
),
M
2
, material properties and geometry. Given
H
2
, independent of
X, we can solve (5.35) for dT
0
/dX,
dT
0
dX
=
2
H
2
2
M
2
C
p
_
T
0
T
re f
_
A
g
Re [a
1
p
1
u
1
]
A
g
a
2
[u
1
)[
2
_
K
0
A
g
+K
s
0
A
s
_
S
2
k
, (5.36)
where
a
1
:= 1 T
0
f
kp
f
+ f
bp
(1 + P
r
)(1 f
)
, (5.37)
a
2
:=
0
C
p
(1 P
r
)[1 f
[
2
Im
_
f
+
f
ku
f
+ f
bu
1 + P
r
_
. (5.38)
Equation (5.36) together with equations (5.18b) and (5.18a) forma complete coupled sys-
tem of differential equations for T
0
, u
1
), and p
1
. This system gives a generalization of
the Swift equations [135], for arbitrary three-dimensional slowly varying cross-sections.
It is possible to go a step further and improve the expression for the mean temper-
Thermoacoustics in three-dimensional pores with variable cross-section 83
ature by determining the correction term T
2,0
. Integrating (5.20) and (5.21) using an
appropriate Greens function, we can determine T
2,0
and T
s
2,0
up to some X-dependent
function T
b
2,0
(= T
b
2,0
(X)). However, before we can determine T
b
2,0
, we need to com-
pute the second and third harmonics, as T
b
2,0
follows as a solvability condition for the
fourth-order mean temperatures T
4,0
and T
s
4,0
.
5.3 Integration of the generalized Swift equations
In equations (5.18a), (5.18b) and (5.36) we have derived a coupled system of differential
equations for the mean temperature T
0
, the acoustic velocity u
1
), and the acoustic pres-
sure p
1
. It follows that that all acoustic variables can be determined after integration of
dT
0
dX
=
2
H
2
2
M
2
C
p
_
T
0
T
re f
_
A
g
Re [a
1
p
1
u
1
)
]
A
g
a
2
[u
1
)[
2
_
K
0
A
g
+K
s
0
A
s
_
S
2
k
, (5.39a)
du
1
)
dX
=a
3
p
1
+
_
a
4
dT
0
dX
1
A
g
dA
g
dX
_
u
1
), (5.39b)
dp
1
dX
=a
5
u
1
), (5.39c)
with
a
1
:= 1 T
0
f
kp
f
+ f
bp
(1 + P
r
)(1 f
)
, (5.40a)
a
2
:=
0
C
p
(1 P
r
)[1 f
[
2
Im
_
f
+
f
ku
f
+ f
bu
1 + P
r
_
, (5.40b)
a
3
:=
i
0
c
2
_
1 + ( 1) f
kp
_
, (5.40c)
a
4
:=
( f
f
ku
)
(1 P
r
)(1 f
)
, (5.40d)
a
5
:=
i
0
1 f
. (5.40e)
Equations (5.39)form a system of ve coupled equations, determining the ve real vari-
ables: Re(p
1
), Im(p
1
), Re(u
1
)), Im(u
1
)), and T
0
. Given the total energy ux
H
2
, the
mass ux
M
2
, the geometry, and appropriate boundary conditions in X, these equations
can be integrated numerically.
This system of equations has a similar structure as the one we obtained for two-
dimensional pores in (4.70). The difference lies in the a
j
functions that are dened in
a slightly different way. The analytic solutions obtained in Sections 4.4.1 and 4.4.2 can
therefore be generalized to three-dimensional pores straightforwardly, by replacing the
a
j
functions by those given above. It is true that (5.40) is more difcult to compute than
(4.71), but below we will discuss two cases for which the a
j
functions simplify greatly.
84 5.3 Integration of the generalized Swift equations
5.3.1 Ideal stack
A stack is considered ideal if the pore walls are of sufciently high heat capacity and
thermal conductivity, so that the wall temperature is locally unaffected by the acoustic
temperature variations in the gas. In short, an ideal stack has T
s
1
= 0. Although in
reality stacks are almost never ideal, they can get close under certain conditions. For
example in gure 4.2 we showed that a parallel-plate stack can approach an ideal stack
(with
s
= 0) provided the stack plates are thick enough.
If we put the assumption of T
s
1
= 0 into our boundary conditions, then it follows
that g
u
= g
p
= 0, so that F
su
= F
sp
= 1, F
kp
= F
ku
= F
k
and f
bu
= f
bp
= 0. As a result the
a
j
functions can be expressed as
a
1
:= 1 T
0
f
k
f
(1 + P
r
)(1 f
)
,
a
2
:=
0
C
p
(1 P
r
)[1 f
[
2
Im
_
f
+
f
k
f
1 + P
r
_
,
a
3
:=
i
0
c
2
[1 + ( 1) f
k
] ,
a
4
:=
( f
f
k
)
(1 P
r
)(1 f
)
,
a
5
:=
i
0
1 f
.
These expressions match the a
j
functions obtained for two-dimensional pores in (4.71)
in case
s
= 0.
5.3.2 Rotationally symmetric pores
Another simplication arises if we consider pores that are rotationally symmetric, such
as cylindrical or conical pores. Then the acoustic temperature uctuations at the solid/gas
interface will only depend on X, so that the g
i
functions can be computed as indicated
in (C.11).
Putting
s
:=
1
K
0
A
g
k
tanh(
k
)
K
s
0
A
s
s
tanh(
s
)
,
Thermoacoustics in three-dimensional pores with variable cross-section 85
we can show that the a
j
functions can be expressed in the familiar form
a
1
:= 1 T
0
f
k
f
(1 + P
r
)(1 +
s
)(1 f
)
,
a
2
:=
0
C
p
[u
1
)[
2
(1 P
r
)[1 f
[
2
Im
_
f
+
(1 +
s
f
/f
k
)( f
k
f
)
(1 + P
r
)(1 +
s
)
_
,
a
3
:=
i
0
c
2
_
1 +
( 1) f
k
1 +
s
_
,
a
4
:=
( f
f
k
)
(1 P
r
)(1 +
s
)(1 f
)
,
a
5
:=
i
0
1 f
.
5.4 Acoustic streaming
In this section we generalize the analysis, derivedrst in Section 4.5 for two-dimensional
pores, to three-dimensional pores. We discuss steady second-order mass ow in the
stack driven by rst-order acoustic phenomena. The analysis is valid for arbitrary
slowly varying pores supporting a temperature gradient. Moreover, the temperature
dependence of viscosity is taken into account.
We start with the continuity equation (3.16). If we time-average the equation and
expand in powers of M
a
, then the zeroth and rst order terms in M
a
will drop out.
Consequently we nd to leading order
X
_
0
u
2,0
_
+
0
2,0
+
1
2
Re
_
X
(
1
u
1
) +
1
v
1
_
_
= 0.
Again applying the divergence theorem and noting that v
g
= 0, we can average over
a cross-section to nd
d
dX
_
A
g
0
u
2,0
) +
A
g
2
Re [
1
u
1
)]
_
= 0.
The expression between the brackets is
M
2
the time-averagedand cross-sectional-averaged
mass ux in the X-direction. It follows that
M
2
is constant, which is to be expected as
there is no mass transport through the stack walls. We can now express u
2,0
) in terms
of
M
2
and the rst order acoustics as follows:
u
2,0
) =
1
0
_
M
2
A
g
1
2
Re [
1
u
1
)]
_
. (5.41)
Next we turn to equation (3.18). Expanding in powers of M
a
and and averaging in
time we nd to leading order in M
a
and that
p
2,0
= 0,
86 5.5 Second harmonics
so that p
2,0
= p
2,0
(X). Subsequently, time-averaging equation (3.17), we nd to leading
order
u
2,0
W
2
o
0
dp
2,0
dX
= f , (5.42)
where f is given by
f :=
1
2
W
2
o
0
Re
_
i
1
u
1
+
0
v
1
u
1
0
F
r
b
x
_
1
2
Re
_
u
1
__
.
The rst-order acoustics collected in f can be interpreted as a source termfor the stream-
ing on the left hand side, with the last term being characteristic for Rayleigh streaming.
We can also see this as a Poissons equation for the streaming velocity u
2,0
, which may
be solved using a Greens function. Introducing the Greens function G
m
that, for xed
x
/
g
(X), satises
G
m
(x; x) = (x
), x
/
g
(X), (5.43)
G
m
(x; x) = 0, o
g
(x) = 0, (5.44)
we can write
u
2,0
(x) =
W
2
o
0
dp
2,0
dX
_
/
g
(X)
G
m
(x; x) d
S +
_
/
g
(X)
G
m
(x; x) f ( x) d
S. (5.45)
Computing the cross-sectional average we can relate dp
m
20
/dX to u
m,20
) as follows:
dp
2,0
dX
=
0
W
2
o
u
2,0
)
_
/
g
G
m
(x; x) f ( x) d
S)
_
/
g
G
m
(x; x) d
S)
. (5.46)
Summarizing, given the mass ux
M
2
and the rst-order acoustics, it only remains
to compute the Greens function G
m
for the desired geometry. Then u
2,0
), dp
2,0
/dX
and u
2,0
can be determined consecutively from (5.41), (5.46) and (5.45).
5.5 Second harmonics
We start with generalizing the auxiliary functions given in (4.9), (4.17), and (4.18)
j,2
:=
2
j
, j = , k, s. (5.47)
Furthermore, for given source function f , we introduce functions
j
( f ) that satisfy
j,2
2
j,2
j,2
= f in /
g
, (5.48a)
j,2
= 0 on
g
. (5.48b)
Thermoacoustics in three-dimensional pores with variable cross-section 87
We expand all variables in powers of M
a
according to (3.24), and substitute the
expansions into the transverse component of the momentum equation (3.18). Putting
2
= M
2
a
, and collecting terms of second order in M
a
we nd
p
2,2
= 0,
and we conclude p
2,2
must be independent of x
. Similarly, collecting all second-order
terms in M
a
, we nd that the X-component of the momentum equation (3.17) reduces
into
2i
0
u
2,2
+
1
2
i
1
u
1
+
1
2
0
u
1
u
1
X
+
1
2
0
v
u
1
=
dp
2,2
dX
+
0
W
2
o
_
u
2,2
+
1
2
u
1
__
, (5.49)
where we substituted (3.26). Note that the steady component from this equation was
chosen such that it vanishes. Rearranging terms we can rewrite (5.49) as
u
2,2
2
,2
u
2,2
=
i
2
0
dp
2,2
dX
+ A, (5.50)
where A, a source term arising from products of rst-order terms, is known and given
by
A =
i
4
0
_
i
1
u
1
+
0
u
1
u
1
X
+
0
v
u
1
0
W
2
o
u
1
_
_
.
The solution, satisfying the no-slip condition, can be written as
u
2,2
=
iF
,2
2
0
dp
2,2
dX
+
,2
(A), u
2,2
) =
i(1 f
,2
)
2
0
dp
2,2
dX
+
,2
(A). (5.51)
Next we turn to the temperature equation. Substituting our expansions into (3.21)
and (3.22) and collecting the terms of second order in M
a
, we nd after some manipula-
tion that T
2,2
and T
s
2,2
can be found from
T
2,2
2
k,2
T
2,2
= B
1
4
2
0
dT
0
dX
dp
2,2
dX
F
,2
+
T
0
0
C
p
p
2,2
, (5.52a)
T
s
2,2
2
s,2
T
s
2,2
= C, (5.52b)
88 5.5 Second harmonics
where B and C are known and given by
4B = iT
1
p
1
+ T
0
u
1
dp
1
dX
iC
p
1
T
1
2
0
C
p
,2
(A)
dT
0
dX
0
u
1
T
1
X
1
u
1
dT
0
dX
0
v
T
1
+
2N
2
L
(K
1
T
1
) + 2
d
dX
_
K
0
dT
0
dX
_
+
0
W
2
o
[
u
1
[
2
,
4C =
2N
2
s
_
_
K
s
1
T
s
1
_
+ 2
d
dX
_
K
s
0
dT
0
dX
__
.
As in Section 5.1 we denote the temperature on the boundary by g, in particular g
2,2
:=
T
2,2
[
g
, and we write
g
2,2
= g
p,2
T
0
0
c
2
p
2,2
g
u,2
4
2
(1 P
r
)
0
dT
0
dX
dp
2,2
dX
.
Using (5.48) and imposing the boundary conditions given in (3.23), we nd
T
2,2
=
k,2
(B) +
T
0
0
C
p
F
kp,2
p
2,2
F
ku,2
P
r
F
,2
4
2
(1 P
r
)
0
dT
0
dX
dp
2,2
dX
, (5.53a)
T
s
2,2
=
s,2
(C) +
T
0
0
C
p
(1 F
sp,2
)p
2,2
1 F
su,2
4
2
(1 P
r
)
0
dT
0
dX
dp
2,2
dX
, (5.53b)
where F
k j,2
( j = p, u) satises
F
k j,2
2
j,2
F
k j,2
= 1 in /
g
, (5.54a)
F
k j,2
= g
j,2
on
g
, (5.54b)
and F
s j,2
( j = p, u) is found from
F
s j,2
2
s,2
F
s j,2
= 1 in /
s
, (5.55a)
F
s j,2
= 1 g
j,2
on
g
, (5.55b)
F
s j,2
n
= 0 on
t
. (5.55c)
Using relations (A.5) and (A.8) and substituting T
2,2
we can derive the following relation
for the second-harmonic density uctuations:
2,2
=
1
c
2
_
1 + ( 1)(1 F
kp,2
)
_
p
2,2
k,B
+
1
2
0
T
1
_
+
_
F
,2
+
F
ku,2
F
,2
1 P
r
_
4
2
dT
0
dX
dp
2,2
dX
. (5.56)
Thermoacoustics in three-dimensional pores with variable cross-section 89
As a result we nd
2,2
) =
1
c
2
_
1 + ( 1) f
kp,2
_
p
2,2
+
_
1 f
,2
+
f
,2
f
ku,2
1 P
r
_
4
2
dT
0
dX
dp
2,2
dX
k,B
+
1
2
0
1
T
1
)
_
. (5.57)
Finally, we turn to the continuity equation (3.16). Expanding the variables in powers
of M
a
and collecting terms of second order in M
a
we nd
2i
2,2
+
X
(
0
u
2,2
) +
0
2,2
=
X
(
1
u
1
)
(
1
v
1
). (5.58)
We know that v vanishes at
g
. Therefore, substituting (5.51) for u
2,2
, multiplying with
i, and averaging over a cross-section, we obtain the following equation as a consis-
tency relation for v
2,2
:
4
2
2,2
) +
1
A
g
d
dX
_
A
g
(1 f
,2
)
dp
2,2
dX
_
=
2i
A
g
X
(A
g
_
1
u
1
) +
0
,2
(A)
).
After substituting (5.57), we obtain
4
2
c
2
_
1 + ( 1) f
kp,2
_
p
2,2
+
f
,2
f
ku,2
1 P
r
dT
0
dX
dp
2,2
dX
+ (1 f
,2
)
dT
0
dX
dp
2,2
dX
+
1
A
g
d
dX
_
A
g
(1 f
,2
)
dp
2,2
dX
_
= 2i
0
E, (5.59)
where E is a source term arising from products of rst-order or zeroth-order quantities
and is given by
E := 2i
_
k,B
+
1
2
0
1
T
1
)
_
0
A
g
X
_
A
g
_
,2
(A) +
1
u
1
)
_
.
Inserting (4.43), we obtain a wave equation for the second pressure harmonic
4
2
c
2
_
1 + ( 1) f
kp,2
_
p
2,2
+
( f
,2
f
ku,2
)
1 P
r
dT
0
dX
dp
2,2
dX
+
0
A
g
d
dX
_
A
g
1 f
,2
0
dp
2,2
dX
_
= 2i
0
E. (5.60)
Apart from the source term E this equation has a similar structure as the wave equation
derived in (4.44) for the rst pressure harmonic.
Combining (5.51) and (5.60) we derive the following two coupled ordinary differen-
90 5.6 Power
tial equations for p
2,2
and q
2,2
:= u
2,2
)
,2
(A)
dq
2,2
dX
=a
3,2
p
2,2
+
_
a
4,2
dT
0
dX
1
1
g
d1
g
dX
_
q
2,2
+ E, (5.61a)
dp
2,2
dX
=a
5,2
q
2,2
, (5.61b)
where
a
3,2
:=
2i
0
c
2
_
1 + ( 1) f
kp,2
_
, (5.62a)
a
4,2
:=
( f
,2
f
ku,2
)
(1 P
r
)(1 f
,2
)
, (5.62b)
a
5,2
:=
2i
0
1 f
,2
. (5.62c)
Since all the zeroth-order and rst-order terms are given by the equations in the pre-
vious sections, we can compute subsequently A, B, C, and E. Moreover, Appendix C
shows how the F
j
and
j
functions can be computed for a given cross-sectional geom-
etry. Having done this, we can integrate the system (5.61) to determine p
2,2
and u
2,2
),
provided appropriate boundary conditions are imposed.
5.6 Power
In Section 5.2 we derived the following expression for the total power
H:
H
2
A
g
=
1
A
g
M
2
C
p
_
T
0
T
re f
_
+
1
2
Re
_
p
1
u
1
_
1 T
0
f
kp
f
+ f
bp
(1 + P
r
)(1 f
)
__
+
0
C
p
[u
1
)[
2
2(1 P
r
)[1 f
[
2
dT
0
dX
Im
_
f
+
f
ku
f
+ f
bu
1 + P
r
_
_
K
0
+K
s
0
A
s
A
g
_
S
2
k
2
dT
0
dX
. (5.63)
As mentioned in Section 4.7.2, the total power can be written as a sum of the acoustic
power
W, the hydrodynamic entropy ux
Q, the heat ow
Q
m
due to a nett mass ux,
and the heat ow
Q
loss
due to conduction down a temperature gradient. For the time-
averaged acoustic power d
W
2
used or produced in a segment of length dX, second
order in M
a
, we can write
d
W
2
dX
=
d
dX
_
A
g
Re
_
p
1
e
it
_
Re
_
u
1
)e
it
_
)
_
. (5.64)
Thermoacoustics in three-dimensional pores with variable cross-section 91
Using (3.25), we nd to leading order
d
W
2
dX
=
1
2
dA
g
dX
Re [p
1
u
1
)] +
A
g
2
Re
_
p
1
du
1
)
dX
+u
1
)
dp
1
dX
_
. (5.65)
Substituting (5.18b) and (5.18a) into (5.65) we nd
d
W
2
dX
=
A
g
2
1 P
r
dT
0
dX
Re
_
f
ku
f
(1 f
)
p
1
u
1
)
_
A
g
2
( 1)
0
c
2
Im
_
f
kp
_
[p
1
[
2
A
g
2
0
Im[f
]
[1 f
[
2
[u
1
)[
2
. (5.66)
92 5.6 Power
Chapter 6
Standing-wave devices
In this chapter we present the results from our computations on standing-wave devices.
We will simulate both refrigerators and prime movers and where possible we will com-
pare our numerical results to analytic approximations and experimental data. The in-
uence of geometry parameters, material and other parameters such as drive ratio and
mean pressure is investigated. The performance of the machines is tested in terms of
the temperature difference, power-output, and efciencies.
6.1 Design
We consider two kinds of standing-wave devices: the thermoacoustic refrigerator and
the thermoacoustic prime mover. As depicted in gure 6.1, they are modeled in three
parts: an acoustically resonant tube, containing a gas, a parallel-plate stack, and two
heat exchangers. In case of a thermoacoustic refrigerator a driver is attached to one
end, and the other end is closed. In case of a prime mover, one end will be closed
and one will be open. When designing a thermoacoustic system several parameters
are important, related to the choice of material, working gas, geometry, and operating
conditions. Below we will discuss a few of these parameters that are important in our
computations.
Stack position
Perhaps the most important design parameter is the position of the stack. Without a
stack, a standing-wave would be maintained in the resonator, with velocity nodes at the
closed ends and pressure nodes at the open ends. With a stack, the standing-wave will
be altered, but if the stack is short enough, then the standing wave will not be perturbed
appreciably, as we saw in our derivation of the short stack approximation in Section
4.4.2. The distance between the stack center and the closed end is denoted by x
s
. Using
the wave number k = 2/, we can introduce a dimensionless number kx
s
that relates
the stack to its position in the acoustic wave. Since the power output is proportional to
the product p
1
u
1
), it follows that the stack has to be positioned somewhere between a
pressure and a velocity node.
94 6.1 Design
x
s
sound
Q
H
Q
C
T
H
T
C
(a) Standing-wave refrigerator
x
s
sound
Q
H
Q
C
T
H
T
C
(b) Standing-wave prime mover
Figure 6.1: Schematic model of (a) thermoacoustic refrigerator and (b) standing-wave ther-
moacoustic prime mover, illustrated with the standing-wave pressure and velocity proles. The
model consists of an acoustically resonant tube lled with gas, a stack of parallel plates positioned
at distance x
s
from the closed end, and two heat exchangers. In (a) we have a half-wave-length
resonator attached to a speaker and in (b) we have a quarter-wave-length resonator that supplies
sound to the exhaust.
Stack length
As mentioned previously the stack length is vital in the design of a thermoacoustic stack.
First of all, the stack should be kept short with respect to the wave length, so that the
acoustic eld is not signicantly altered. Furthermore, as the stack length is increased,
the viscous and thermal dissipation will increase as well, reducing the efciency sig-
nicantly. On the other hand, if the stack length is increased then more heat can be
pumped by the stack, so that higher temperature differences and larger power-output
can be obtained. The optimal stack length is obtained by balancing these effects.
Plate separation
In standing-wave systems it is benecial to have pores with a radius of one or more
thermal penetration depths, i.e. N
L
1. This is necessary to create the optimal phasing
between pressure and velocity and create an optimal heat-shuttling effect. It was shown
in equations (4.136) and (4.138) that (in an idealized situation) the highest acoustic pow-
ers are obtained if N
L
1.
Standing-wave devices 95
Plate material
The term
Q
loss
in the expression for the total power (4.140) represents the heat conduc-
tion through gas and plate material and it is a loss term; it has a negative effect on the
performance. To reduce the effect of this term a material must be chosen with a low
thermal conductivity. On the other hand, we must take a heat capacity C
s
larger than
the heat capacity C
p
of the working gas, so that the plate temperature can be considered
steady (
s
= 0).
Drive ratio
The drive ratio D
r
is dened as the ratio between the dynamic pressure amplitude p
A
(at the closed end) and the mean pressure p
0
,
D
r
=
p
A
p
0
,
and is a measure for the amplitude of the sound eld. In general one is interested in
high drive ratios because this leads to larger power outputs and larger temperature dif-
ferences. However, at high drive ratios nonlinear effects will start to become important
that may degrade the performance. Turbulence may occur, but also shock waves due to
interaction of the higher harmonics.
6.2 Computations
We have implemented the system (4.70) for the conguration shown in gure 6.1(a).
There are three regions for which a solution has to be computed: the resonator, the heat
exchangers, and the stack. Each region requires a different approach.
Resonator
We consider an insulated resonator, that is kept at a constant temperature, without heat
leaks to the environment. Although in reality the resonator will be cylindrical we will
model it as straight two-dimensional channel to simplify the calculations. In Section
4.4.1 it was shown that for straight two-dimensional pores the exact solution looks as
follows:
p
1
(X) = Ae
ik
r
X
+ Be
ik
r
X
, (6.1a)
u
1
)(X) =
r
0
c
_
Ae
ik
r
X
Be
ik
r
X
_
, (6.1b)
with A and B integration constants and
r
=
1
c
(1 f
)
_
1 +
1
1 +
s
f
k
_
, (6.2)
k
r
=
r
a
3
a
5
=
c
1
1 f
_
1 +
1
1 +
s
f
k
_
, (6.3)
96 6.3 A thermoacoustic couple
where
r
and k
r
are computed from the resonator properties. The viscous dissipation in
the resonator is accounted for as the wave number k
r
will have a small imaginary part.
Heat exchangers
The heat exchangers are used to exchange heat with the environment. In our compu-
tations they are modeled as innitely short with temperature T
H
at the hot end and
temperature T
C
at the cold end.
Stack
Inside the stack there will be a nontrivial temperature difference and the full system of
equations (4.70) needs to be solved. For this standard ode-solvers from MatLab can be
used. The result can be compared to the short-stack approximation derived in Section
4.4.2, provided the stack is short enough and
H = 0.
Boundary and interface conditions
To x all the integration constants, boundary conditions have to be imposed. We start
our computations at the closed end, where we give the pressure amplitude and impose
zero velocity. At the interface with the stack we impose continuity of mass and momen-
tum, which gives continuity of pressure p
1
and volumetric velocity A
g
u
1
).
We still need boundary conditions for the temperature. There are two constants of
integration and so we can choose to x the temperature at the heat exchangers on either
side of the stack. Alternatively, one can also impose the temperature on one side and a
cooling (or heating) power, and the temperature on the other side will follow.
Lastly, we mention that typically there is no time-averaged mass ux
M in the sys-
tem. With a nonzero
M there would be an accumulation or depletion of mass at the
closed end, which is not physically realistic. In the looped geometries that we consider
in Chapter 7, nonzero mass uxes may be present.
6.3 A thermoacoustic couple
The simplest type of thermoacoustic devices is the so-called thermoacoustic couple
(TAC), a stack of short parallel plates without heat exchangers positioned in a half-
wave-length resonator, with a driver providing a standing-wave. It is of the type shown
in gure 6.1(a), but without heat exchangers.
Due to its simplicity a thermoacoustic couple is perfect for a quantitative under-
standing of the basic thermoacoustic effect. There are no heat exchangers, but a steady-
state temperature prole is developed across the stack from a balance of the thermoa-
coustic heat ow (
W +
Q) by a return diffusive heat ow (
Q
loss
) in the stack and in the
gas. The resulting energy ux through a stack pore will be equal to zero (
H = 0).
The rst measurements of thermoacoustic couples were performed by Wheatley
et al. [151], who measured the temperature difference developed across the stack as
a function of its position kx
s
for drive ratios of approximately 0.3%. Additionally,
they derived a theoretical prediction (see (4.90)) for the temperature difference, using
a boundary-layer and short-stack approximation, which was later slightly modied by
Standing-wave devices 97
Atchley et al. [11]. Atchley et al also extended the measurements to higher driver ratios
of up to 2%. We will validate our numerical code by comparison against these measure-
ments.
6.3.1 Acoustically generated temperature differences
We consider the thermoacoustic couple TAC #3 as described in [11]. It comprises a
parallel-plate stack placed in helium-lled resonator with plates that are a lamination
of 302 stainless steel and G-10 berglass, epoxied together. All relevant parameters are
given in Table 6.1.
Parameter Symbol Value Unit
total power
H 0 W
mass ux
M 0 kg m/s
speed of sound c 1020 m/s
isobaric specic heat C
p
5190 J/(kg K)
isochoric specic heat C
v
3110 J/(kg K)
plate separation d
g
1.5210
3
m
thickness berglass d
f g
1.0210
4
m
thickness stainless steel d
ss
8.8910
5
m
thickness plate d
s
= d
f g
+ d
ss
1.9110
4
m
frequency f 696 Hz
thermal conductivity Helium K
g
0.16 W/(m K)
thermal conductivity berglass K
f g
0.48 W/(m K)
thermal conductivity stainless steel K
ss
11.8 W/(m K)
thermal conductivity plate K
s
=
d
f g
K
f g
+d
ss
K
ss
d
s
5.76 W/(m K)
stack length L
s
6.8510
3
m
average pressure p
0
1.1410
5
Pa
Prandtl number P
r
0.68 -
ambient temperature T
L
298 K
Table 6.1: Specications for TAC #3
Using the procedure given in Section 6.2, we have calculated numerically the ex-
pected temperature differences developed across the stack in case
H = 0 for various
drive ratios. In gure 6.2 we plot the temperature difference across the stack as a func-
tion of kx
s
, the relative position of the stack center for drive ratios of 0.28 and 1.99%.
The numerical outcome is compared with the measurements of [11], the short-stack ap-
proximation (4.89) and the short-stack/boundary-layer approximation (4.90).
For this conguration we have that 0.015 1 and N
L
2.75. It is therefore no
surprise that the short-stack approximation and the numerics agree very well. Further-
more, the match with (4.90) is remarkably good, even though N
L
is not much greater
than 1. The match with the measurements is not bad either, but for high drive ratios
the t seems to become worse; both the numerics and the theoretical predictions over-
predict the measured values. In [11] this is attributed to uncertainties in the thermal
conductivity of the stack material or possible measurement errors.
98 6.3 A thermoacoustic couple
0.5 1 1.5 2 2.5 3 3.5 4 4.5
0.3
0.2
0.1
0
0.1
0.2
0.3
t
e
m
p
e
r
a
t
u
r
e
d
i
f
f
e
r
e
n
c
e
(
K
)
numerics
short stack approx.
Wheatley et al.
Atchley et al.
kx
s
(a) D
r
= 0.28%
0.5 1 1.5 2 2.5 3 3.5 4 4.5
6
4
2
0
2
4
6
t
e
m
p
e
r
a
t
u
r
e
d
i
f
f
e
r
e
n
c
e
(
K
)
numerics
short stack approx.
Wheatley et al.
Atchley et al.
kx
s
(b) D
r
= 1.99%
Figure 6.2: The temperature difference across the stack as a function of the relative position of
the stack center. The solid line shows the results from the numerics, the dashed line shows the
short-stack approximation (4.89), the squares shows the values predicted by Wheatley et al. , and
the triangles show the measurements of [11].
In an article by Piccolo et al. [99], a simplied numerical model was derived for de-
scribing time-average transverse heat transfer near the edges of a thermally isolated
thermoacoustic stack at low Mach numbers. The difference with the approach used here
lies in the inclusion of a y-dependence in the mean temperature and various simplify-
ing assumptions such as constant pressure and velocity inside the stack. This model
was compared to the experimental data of Atchley et al. [11] and to what Picollo et al.
call standard thermoacoustic theory. The latter is an approximation similar to the ap-
proximation of Wheatley et al. [151]. Figure 6.3 show a close-up of gure 6.2(b) near the
maximal temperature difference and includes the results of [99].
1,5 2 2,5 3
0
2
4
6
t
e
m
p
e
r
a
t
u
r
e
d
i
f
f
e
r
e
n
c
e
(
K
)
7
kx
s
Figure 6.3: Close-up of gure 6.2(b) near the maximal value for D
r
= 1.99%. The results are
compared to those of Piccolo et al [99].
Standing-wave devices 99
To show the effect of increasing drive ratio we can compute for various drive ra-
tios the temperature difference numerically. In gure 6.4 the results are compared to
those obtained experimentally in [11] for various drive ratios between 0.17%and 1.99%.
Comparing the results, we again observe reasonable agreement, with larger deviations
for high drive ratios. Both in gure 6.4(a) and gure 6.4(b) the temperature difference
progresses from a perfect sinusoid for small amplitudes to a sawtooth curve for large
drive ratios with extremes shifting towards the pressure antinodes.
0.5 1.5 2.5 3.5 4.5
6
4
2
0
2
4
6
t
e
m
p
e
r
a
t
u
r
e
d
i
f
f
e
r
e
n
c
e
(
K
)
kx
s
(a) Numerics
t
e
m
p
e
r
a
t
u
r
e
d
i
f
f
e
r
e
n
c
e
(
K
)
kx
s
(b) Measurements
Figure 6.4: The (a) computed and (b) measured temperature difference across the stack as a
function of the relative position of the stack for drive ratios ranging between 0.17 and 1.99%.
Finally we also look at the impact of the stack on the velocity and pressure eld in
the tube. Fig. 6.5 shows the pressure and velocity amplitude throughout the tube with
the stack positioned at kx
s
= /4 together with the pressure and velocity amplitudes
in the absence of the stack. The plot shows that the pressure and velocity are hardly
effected by the stack because it is so short. Note the discontinuities in the velocity at the
stack ends which arise to maintain the same volumetric mass ux, as the cross-sectional
area of the gas is smaller in the stack than in the resonator.
6.3.2 Acoustic power
Since a thermoacoustic couple does not have heat exchangers, the heating and cooling
power will be equal to zero and the coefcient of performance has no meaning. How-
ever, the acoustic power will be nonzero and is necessary to obtain the steady-state
temperature prole. In Section 4.7.1 we showed that the acoustic power produced or
absorbed in a segment of length dX is composed of a source/sink term, a viscous dissi-
pation term, and a thermal relaxation term,
d
W
2
dX
=
d
W
s
2
dX
d
W
k
2
dX
d
W
2
dX
= O(1) O
_
N
2
L
_
O
_
1
W
2
o
_
, W
o
, N
L
1.
(6.4)
100 6.4 A standing-wave refrigerator
0
0
500
1000
1500
2000
2500
p
1
(
P
a
)
with stack
without stack
/4 /2 3/4
kx
s
(a) pressure amplitude
0
0
2
4
6
8
10
12
14
p
1
(
P
a
)
with stack
without stack
/4 /2 3/4
kx
s
(b) velocity amplitude
Figure 6.5: (a) The absolute value of the acoustic pressure and (b) the absolute value of the
crosswise-averaged velocity throughout the tube both without a stack and with a stack positioned
at kx
s
=
4
. The drive ratio is 1.99 %.
To test this equation for a real application, we consider the thermoacoustic couple as
introduced in the previous section. We put the stack at 5 cm from the closed end, apply
a drive ratio of 2%, and vary N
L
. The remaining parameters are chosen as in Table 6.1.
In gure 6.6 we have plotted the acoustic power
W
2
absorbed by the stack together
with its source term and dissipation components.
Looking at the graph of the thermal relaxation dissipation
W
k
2
, we indeed observe
that
W
k
2
tends to zero for decreasing N
L
, but only until N
L
0.1. Below this value
W
k
2
starts to grow rapidly again because
W
k
2
scales with [p
1
[
2
. As the pore size becomes
smaller and smaller, the pressure drop (and also the velocity) in the stack will become
larger and larger, canceling the effect of the prefactor Im( f
k
). For the viscous dissipation
2
the situation is simpler. Both [u
1
[
2
and its prefactor will explode for small N
L
, and
therefore
W
2
too, as the graph clearly shows. The graph also shows that the source
term is maximal for N
L
close to 1. Below this value the viscous dissipation increases
dramatically and therefore, for the case considered here, N
L
should not be taken smaller
than 1. This conrms the choice of N
L
1 that is commonly applied in standing-wave
devices.
6.4 A standing-wave refrigerator
The aim of this section is to study how a standard thermoacoustic refrigerator as de-
picted in 6.1(a) behaves in terms of parameters such as cooling power, drive ratio, tem-
perature difference, mean pressure, stack position, stack length, and coefcients of per-
formance. In particular we are interested in what happens at large amplitudes, going
up to drive ratios of 40%. In all likelihood drive ratios of 40% are too high to obtain very
accurate predictions of the performance of the refrigerator, since nonlinearities will se-
riously start to affect the performance. Furthermore, there are all kinds of practical
considerations and limitations that prevent us from achieving these high amplitudes.
Still these computations can give some quantitative insight into the behavior of the re-
frigerator and it shows how the refrigerator would work under ideal circumstances.
Standing-wave devices 101
0 0.5 1 1.5 2
100
0
100
200
300
400
a
c
o
u
s
t
i
c
p
o
w
e
r
(
W
/
m
2
)
N
L
acoustic power
source
therm. dissipation
visc. dissipation
Figure 6.6: The acoustic power per unit area absorbed by the thermoacoustic couple as a func-
tion of the Lautrec number for
H = 0 and a drive ratio of 2%. The stack is positioned at 5cm
from the closed end.
The cooling and heating power depend on the position of the stack inside the res-
onator. In gure 6.7 we show a detailed description of all the energy ows in and around
the stack depending on whether the stack is placed near the closed end or near the
driver. In both cases the hot end will face the nearest end of the resonator and the total
power
H through the stack will be constant and directed from the cold to the hot end.
When the stack is positioned near the driver, we assume that the driver supplies
acoustic power
W
driver
which is reduced to
W
H
due to viscous interaction with the res-
onator wall. Most of
W
H
is then absorbed by the stack, and the remaining amount
W
C
will be dissipated by the resonator wall left of the cold end. Alternatively, when the
stack is positioned near the closed end, we again assume that the driver supplies acous-
tic power
W
driver
which is reduced to
W
C
by dissipation in the resonator. Most of
W
C
is then absorbed by the stack, and the remaining amount
W
H
will be dissipated by the
resonator left of the hot end. In either case, we have the following expressions for the
cooling power extracted at the cold end and the heating power supplied to the hot end,
Q
C
=
H
W
C
,
Q
H
=
H
W
H
. (6.5)
The performance of the refrigerator will be measured by the (relative) coefcient of per-
formance
COP =
Q
C
W
, COPR =
COP
COPC
1, COPC =
T
C
T
H
T
C
. (6.6)
To compute the stack efciency we can substitute
W =
W
C
W
H
and to compute the
refrigerator efciency we can put
W =
W
driver
. Due to wall attenuation and the second
law of thermodynamics we have that 0 COP
stack
COP
driver
COP
C
.
Our numerical calculations are motivated by experiments performed at Shell by
Araujo [4], where a simple air-lled standing-wave refrigerator with a ceramic stack
102 6.4 A standing-wave refrigerator
x
s
W
H
H
H
W
C
Q
H
Q
C
T
H
T
C
(a) Stack near closed end
x
s
W
C
H
H
W
H
Q
H
Q
C
T
H
T
C
(b) Stack near driver
Figure 6.7: Schematic model of the energy ows in a thermoacoustic refrigerator with a stack
positioned (a) near the closed end or (b) near the driver. The hot end always faces the nearest end
of the resonator. Heating power
Q
H
is supplied to the hot end and cooling power is extracted
from the cold end. Acoustic power
W
C
W
H
is absorbed by the stack.
was tested. To simplify calculations we assume a parallel-plate structure for the stack
as opposed to the honey-comb stack tested by Araujo, but with the same porosity. For
most of our computations we have kept the stack center xed at 2.5 cm from the closed
end, to maximize the COPR. All other relevant parameters are given in Table 6.2.
Parameter Symbol Value Unit
mass ux
M 0 kg m/s
speed of sound c 375 m/s
isobaric specic heat C
p
1000 J/(kg K)
isochoric specic heat C
v
714 J/(kg K)
tube diameter d
b
0.073 m
pore diameter d
g
3.710
4
m
plate diameter d
s
610
5
m
frequency f 393 Hz
thermal conductivity gas K
g
0.0262 W/(m K)
thermal conductivity plate K
s
2 W/(m K)
stack length L
s
0.03 m
average pressure p
0
110
5
Pa
temperature hot heat exchanger T
H
370 K
distance between stack centre and closed end x
s
0.025 m
Table 6.2: Parameters for the standing-wave refrigerator tested in [4].
In all gures shown below the left column shows the result for a mean pressure of
1 bar and the right column shows the result when the mean pressure is increased to 20
bar, while keeping N
L
and B
r
constant.
Standing-wave devices 103
0 0.5 1 1.5 2
x 10
4
0
0.2
0.4
0.6
0.8
1
1.2
C
O
P
cooling power (W/m
2
)
D=5%
D=10%
D=20%
D=30%
D=40%
(a) p
0
= 1 bar
0 1 2 3 4
x 10
5
0
0.2
0.4
0.6
0.8
1
1.2
C
O
P
cooling power (W/m
2
)
D=5%
D=10%
D=20%
D=30%
D=40%
(b) p
0
= 20 bar
0 25 50 75 100 125
0
0.5
1
1.5
C
O
P
temperature difference (K)
D=5%
D=10%
D=20%
D=30%
D=40%
(c) p
0
= 1 bar
0 25 50 75 100 125
0
0.5
1
1.5
C
O
P
temperature difference (K)
D=5%
D=10%
D=20%
D=30%
D=40%
(d) p
0
= 20 bar
Figure 6.8: The coefcient of power COP as a function of the temperature difference T
H
T
C
or
cooling power
Q
C
. The calculations are repeated for various drive ratios and for mean pressures
equal to 1 or 20 bar.
In gure 6.8 we have plotted the COP as a function of both the cooling power and
the temperature difference for various drive ratios. The plots show that for increasing
cooling power, the COP becomes larger. With the cooling power increasing, the temper-
ature difference across the stack naturally becomes smaller, and a peak COP is attained
for a temperature difference equal to zero. Furthermore, it is noticed that for increasing
drive ratio the COP increases as well. However, plots 6.8(c) and 6.8(d) show that beyond
30% for p
0
= 1 bar and beyond 10% for p
0
= 20 bar, increasing the drive ratio has little
effect, because the temperature drop approaches the critical temperature difference. It
follows that the critical temperature difference is approximately 115 K for both p
0
= 1
bar and p
0
= 20 bar. Swift [135] predicts for the critical temperature gradient,
T
crit
=
0
c
p
p
1
u
1
)
, (6.7)
which gives a temperature difference of approximately 247 K. We conclude that this
prediction, based on an inviscid approach, overpredicts the numerical result. Finally,
we note that going from 1 bar to 20 bar, the cooling power needs to be increased by
roughly a factor 20 as well, to obtain the same temperature difference.
In gure 6.9 we have repeated the previous calculations for the relative coefcient
of performance COPR and the same conclusions can be drawn. However, in contrast
104 6.4 A standing-wave refrigerator
to the COP, the COPR has a peak value, which appears to converge to a xed value
for increasing drive ratio. The peak for 20 bar is only slightly higher than for 1 bar.
However, at a mean pressure of 1 bar a higher drive ratio are required to approach the
peak. Note also that the two zeros of the COPR occur where the cooling power and
temperature difference equal zero.
0 2 4 6 8 10
x 10
4
0
0.05
0.1
0.15
0.2
0.25
0.3
C
O
P
R
cooling power (W/m
2
)
D=5%
D=10%
D=20%
D=30%
D=40%
(a) p
0
= 1 bar
0 0.5 1 1.5 2
x 10
6
0
0.05
0.1
0.15
0.2
0.25
0.3
C
O
P
R
cooling power (W/m
2
)
D=5%
D=10%
D=20%
D=30%
D=40%
(b) p
0
= 20 bar
0 25 50 75 100 125
0
0.05
0.1
0.15
0.2
0.25
0.3
C
O
P
R
temperature difference (K)
D=5%
D=10%
D=20%
D=30%
D=40%
(c) p
0
= 1 bar
0 25 50 75 100 125
0
0.05
0.1
0.15
0.2
0.25
0.3
C
O
P
R
temperature difference (K)
D=5%
D=10%
D=20%
D=30%
D=40%
(d) p
0
= 20 bar
Figure 6.9: The relative coefcient of power COPR as a function of the temperature difference
T
H
T
C
or cooling power
Q
C
. The calculations are repeated for various drive ratios and for
mean pressures equal to 1 or 20 bar.
In gure 6.9 we observed that the peak COPR-value appears to converge to a xed
value. In gure 6.10 we examine this by plotting for each drive ratio the optimal value
of the coefcients of performance, i.e. the values of the COP and COPR for which the
COPR attains its peak value. Both graphs seem to converge to the same xed value for
high drive ratios. Particularly for 20 bar the convergence is quite fast.
In the previous calculations the stack was xed at 2.5 cm from the closed end. The
location of the stack can be optimized to maximize the efciency. In gure 6.11 we vary
the position of the stack for a drive ratio of 30% and mean pressures of 1 and 20 bar.
We choose this drive ratio to ensure that the COPR
opt
approaches its maximal value (see
gure 6.10). The resulting graphs for 1 and 20 bar are almost overlapping. Furthermore
both reach their peak value near kx
s
= 0.16, which corresponds with a stack center
positioned at 2.5 cm from the closed end. This is in fact the case considered in all other
plots in this section.
Standing-wave devices 105
0 0.1 0.2 0.3 0.4
0.86
0.88
0.9
0.92
0.94
0.96
C
O
P
o
p
t
drive ratio
p
0
= 1 bar
p
0
= 20 bar
(a)
0 0.1 0.2 0.3 0.4
0
0.05
0.1
0.15
0.2
0.25
0.3
C
O
P
R
o
p
t
drive ratio
p
0
= 1 bar
p
0
= 20 bar
(b)
Figure 6.10: The optimal coefcients of performance COP
opt
and COPR
opt
, corresponding to
the peak COPR-values, as a function of the drive ratio. The calculations are performed for mean
pressures equal to 1 or 20 bar.
0 0.5 1 1.5
0
0.5
1
1.5
2
C
O
P
o
p
t
kX
s
p
0
= 1 bar
p
0
= 20 bar
(a)
0 0.5 1 1.5
0
0.05
0.1
0.15
0.2
0.25
0.3
C
O
P
R
o
p
t
kX
s
p
0
= 1 bar
p
0
= 20 bar
(b)
Figure 6.11: The optimal coefcients of performance COP
opt
and COPR
opt
, corresponding to
the peak COPR-values, as a function of the scaled stack position. The calculations are performed
for a drive ratio of 30% and mean pressures equal to 1 and 20 bar.
Figure 6.12 shows how the cooling power, temperature difference and drive ratio in
the stack depend on each other. We again observe the same critical temperature differ-
ences of approximately 115 K, where the effect of the drive ratio is minimal, which is
reected in the nodes where all the lines cross. In both cases the corresponding cooling
power is approximately -1800 W/m
2
, which is caused almost completely by the conduc-
tion through gas and stack material. For high drive ratios, the temperature difference
will approach the critical temperature difference more and more. Left of the node, the
device will act as a prime mover, while right of the node, for positive cooling powers,
the device will act as a refrigerator.
Shown in gure 6.13, are the acoustic and cooling power as a function of the (scaled)
position of the stack center, while keeping the temperature difference over the stack
equal to zero. The peak acoustic powers are obtained near the tube center, which cor-
responds to 1/4 of the wave length. The peak cooling powers on the other hand are
obtained at 1/4 and 3/4 of the tube length, which is at about 1/8 and 3/8 of the wave
106 6.4 A standing-wave refrigerator
5000 0 5000 10000
0
25
50
75
100
125
150
t
e
m
p
e
r
a
t
u
r
e
d
i
f
f
e
r
e
n
c
e
(
K
)
cooling power (W/m
2
)
D = 5%
D = 10%
D = 20%
D = 30%
D = 40%
(a) p
0
= 1 bar
1 0 1 2
x 10
5
0
25
50
75
100
125
150
t
e
m
p
e
r
a
t
u
r
e
d
i
f
f
e
r
e
n
c
e
(
K
)
cooling power (W/m
2
)
D = 5%
D = 10%
D = 20%
D = 30%
D = 40%
(b) p
0
= 20 bar
Figure 6.12: Mutual dependence of cooling power, temperature difference and drive ratio. The
calculations are performed for mean pressures equal to 1 or 20 bar.
length. In the right part of the graph, the cooling power turns negative and the device
starts to work as a heater. Note also that the power is amplied by a factor 20, as the
mean pressure is increased from 1 to 20 bar.
0 0.5 1 1.5 2 2.5 3
0
500
1000
1500
2000
2500
a
c
o
u
s
t
i
c
p
o
w
e
r
(
W
/
m
2
)
kX
s
D=1%
D=2%
D=3%
(a) p
0
= 1 bar
0 0.5 1 1.5 2 2.5 3
0
1
2
3
4
5
x 10
4
a
c
o
u
s
t
i
c
p
o
w
e
r
(
W
/
m
2
)
kX
s
D=1%
D=2%
D=3%
(b) p
0
= 20 bar
0 0.5 1 1.5 2 2.5 3
0
1000
2000
3000
4000
c
o
o
l
i
n
g
p
o
w
e
r
(
W
/
m
2
)
kX
s
D=1%
D=2%
D=3%
(c) p
0
= 1 bar
0 0.5 1 1.5 2 2.5 3
0
2
4
6
8
x 10
4
c
o
o
l
i
n
g
p
o
w
e
r
(
W
/
m
2
)
kX
s
D=1%
D=2%
D=3%
(d) p
0
= 20 bar
Figure 6.13: Supplied cooling power and absorbed acoustic power as a function of the scaled
stack position. The temperature difference across the stack is kept at 0 K, and the drive ratio is
varied between 1 and 3%. The calculations are repeated for mean pressures equal to 1 and 20
bar.
So far, we have kept the stack length xed at 3 cm in all our computations. The stack
Standing-wave devices 107
length is, however, an important parameter in the design of a stack that should be taken
neither too small nor too large for optimal performance. In gure 6.14 we show the
COPR as a function of both the cooling power and the temperature difference across the
stack for various stack lengths and a drive ratio of 30%.
0 1 2 3 4 5 6
x 10
4
0
0.1
0.2
0.3
0.4
0.5
C
O
P
R
cooling power (W/m
2
)
L
s
= 0.1 cm
L
s
= 0.5 cm
L
s
= 1 cm
L
s
= 2 cm
L
s
= 3 cm
L
s
= 4 cm
(a) p
0
= 1 bar
0 2 4 6 8 10 12
x 10
5
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
C
O
P
R
cooling power (W/m
2
)
L
s
= 0.1 cm
L
s
= 0.5 cm
L
s
= 1 cm
L
s
= 2 cm
L
s
= 3 cm
L
s
= 4 cm
(b) p
0
= 20 bar
0 50 100 150
0
0.1
0.2
0.3
0.4
0.5
C
O
P
R
temperature difference (K)
L
s
= 0.1 cm
L
s
= 0.5 cm
L
s
= 1 cm
L
s
= 2 cm
L
s
= 3 cm
L
s
= 4 cm
(c) p
0
= 1 bar
0 50 100 150
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
C
O
P
R
temperature difference (K)
L
s
= 0.1 cm
L
s
= 0.5 cm
L
s
= 1 cm
L
s
= 2 cm
L
s
= 3 cm
L
s
= 4 cm
(d) p
0
= 20 bar
Figure 6.14: The relative coefcient of power COPR as a function of the temperature difference
T
H
T
C
or cooling power
Q
C
. The calculations are repeated for various stack lengths, a drive
ratio of 30% and for mean pressures equal to 1 and 20 bar.
On the one hand, we see that in order to obtain a large COPR we need to take the
stack as short as possible. On the other hand, we see that these large COPR are only
achieved at very small temperature differences and cooling powers. Therefore, if one is
satised with a small temperature difference across the stack, then very large COPR can
be obtained. In gure 6.15 we have shown this more clearly by plotting the peak COPR
value as a function of the stack length. For mean pressures of both 1 and 20 bar we
see that the maximal COPR is obtained when the stack length L
s
approaches zero. The
other extreme is when the stack length approaches 0.5 cm and the refrigerator becomes
highly inefcient. For longer stacks the refrigerator even stops working altogether.
If one is more interested in large cooling powers and temperature differences and
less in a large COPR, then one can try to maximize the achievable cooling power and
temperature differences that is obtained from gure 6.15 at zero COPR. In gure 6.16
we plot these values as a function of the stack length. It turns out that the maximal
cooling power is obtained for stack lengths close to 2 cm and the maximal temperature
difference is obtained for stack lengths close to 4 cm. Therefore, the choice of L
s
= 3 cm,
108 6.5 A standing-wave prime mover
that was made in all previous calculations, seems to be a reasonable choice.
0 2 4 6 8
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
C
O
P
R
o
p
t
L
s
(cm)
p
0
= 1 bar
p
0
= 20 bar
(a)
0 2 4 6 8
0
1
2
3
4
5
C
O
P
o
p
t
L
s
(cm)
p
0
= 1 bar
p
0
= 20 bar
(b)
Figure 6.15: (a) COPR
opt
and (b) COP
opt
as a function of the stack length for a 30% drive ratio
and mean pressures of 1 and 20 bar.
0 2 4 6 8
0
2
4
6
8
10
12
x 10
5
Q
c
m
a
x
L
s
(cm)
p
0
= 1 bar
p
0
= 20 bar
(a)
0 2 4 6 8
0
20
40
60
80
100
T
m
a
x
L
s
(cm)
p
0
= 1 bar
p
0
= 20 bar
(b)
Figure 6.16: The maximal achievable cooling power and temperature difference as a function of
the stack length for a 30% drive ratio and mean pressures of 1 and 20 bar.
6.5 A standing-wave prime mover
In this section we aim to analyze a thermoacoustic prime mover of the type depicted
in 6.1(b). A higher goal is a comparison with the traveling-wave prime mover that will
be discussed in Chapter 7, which is based on the Swift-type looped geometry [14].
To ensure an accurate and meaningful comparison we will choose a conguration that
resembles this traveling-wave conguration as close as possible. In [14] a stainless steel
regenerator is positioned in a helium-lled looped resonator with parameters as given
in 6.5. Instead of the regenerator we will model a parallel-plate stack placed in a straight
helium-lled resonator with the same operating conditions. The stack position, porosity,
and Lautrec number will be optimized to maximize the efciency. In the end we will
also examine how the choice of plate material affects the performance.
Given the acoustic power
W
H
and
W
C
at the hot and cold end, and the total power
Standing-wave devices 109
parameter symbol value unit
mass ux
M 0 kg m/s
speed of sound c 1020 m/s
isobaric specic heat C
p
5193.2 J/(kg K)
isochoric specic heat C
v
3115.9 J/(kg K)
thermal conductivity gas K
g
0.16 W/(m K)
stack length L
s
7.3 cm
gas radius R
g
4.2 cm
solid radius R
s
3.0 cm
tube radius R
b
7.3 cm
frequency f 84 Hz
mean pressure p
0
3.1 10
6
Pa
drive ratio D
r
5 %
low temperature T
C
300 K
high temperature T
H
600 K
Table 6.3: Parameters: a helium-lled parallel-plate stack
through the stack
H, we can compute
Q
C
=
H
W
C
,
Q
H
=
H
W
H
, (6.8)
with the sign of
H,
W
C
, and
W
H
chosen such that they are positive. The performance of
the prime mover will be measured by the (relative) efciency
=
W
C
W
H
Q
H
,
R
=
T
H
T
H
T
C
COP. (6.9)
Note that that 0
R
1 due to the second law of thermodynamics.
We start with the parameter values given in Table 6.5. We vary the position of the
stack in the resonator and for each position we compute the relative efciency
R
. Figure
6.17 shows the results of these computations for different temperature differences across
the stack. It turns out that for all temperature differences the optimal stack position lies
near the closed end with kx
s
= 0.045, and as the temperature difference increases the
optimal stack position shifts more and more to the closed end. The plots also show that
not every stack position is suitable for a prime mover operating at a given temperature
difference. The temperature difference has to be larger than the critical temperature
gradient which is maximal near the closed end. The larger the imposed temperature
difference, the bigger the region where the stack produces sound.
Next we x the temperature difference at 300 K and kx
s
at 0.045 and we optimize
the Lautrec number N
L
. Figure 6.18 shows the relative efciency as a function of the
Lautrec number. The optimal value is obtained for N
L
0.795.
The last parameter we wish to optimize is the porosity of the stack. We vary the
blockage ratio B
r
between 0 and 1 and compute the relative efciency. It should be noted
that for these computations
s
cannot be neglected. When B
r
approaches 1,
s
starts to
grow and the wall temperature is no longer a steady variable. Figure 6.19 shows
R
as
a function of B
r
and it turns out that
R
is optimal when B
r
0.887.
110 6.5 A standing-wave prime mover
0 0.1 0.2 0.3 0.4
0
0.05
0.1
0.15
0.2
R
kx
s
T
H
T
C
= 200 K
T
H
T
C
= 250 K
T
H
T
C
= 300 K
T
H
T
C
= 350 K
T
H
T
C
= 400 K
Figure 6.17: The relative stack efciency
R
as a function of the relative stack position kx
s
for
different temperature differences across the stack. The optimal stack position is kx
s
0.03 if the
blockage ratio is equal to 0.72 and the Lautrec number is equal to 0.275.
0 0.5 1 1.5 2 2.5 3
0
0.1
0.2
0.3
0.4
R
N
L
0.795
Figure 6.18: The relative stack efciency
R
as a function of the Lautrec number N
L
. The
optimal Lautrec number is N
L
0.795 when T
H
T
C
= 300 K, kx
s
= 0.045, and B
r
= 0.72.
0 0.2 0.4 0.6 0.8 1
0
0.1
0.2
0.3
0.4
0.5
R
B
r
0.887
Figure 6.19: The relative stack efciency
R
as a function of the blockage ratio B
r
. The optimal
efciency is obtained for B
r
0.887, when T
H
T
C
= 300 K, kx
s
= 0.045, and N
L
= 0.795.
Standing-wave devices 111
So far, following [14], we used stainless steel for the stack plates in all our calcu-
lations. However, there is a wide range of materials possible, ranging from metal-like
materials to polystyrene that is used to manufacture plastic straws. In gure 6.20 we
test several options by repeating the calculations of gure 6.19 for different plate materi-
als. Furthermore in gure 6.21 we show the corresponding acoustic and cooling power,
again as a function of the blockage ratio B
r
. It turns out that for all materials, similar
efciencies and acoustic powers are obtained , although mylar seems to work best. Fur-
thermore all materials seem to achieve their maximal efciency close to B
r
= 0.83. The
highest acoustic powers are obtained for small porosities, but at a very low efciency,
which requires an enormous input of heating power,. We will show in Chapter 7 that
for a traveling-wave geometry, the choice of material has a much greater impact on both
the efciency and the heating and acoustic power.
0 0.2 0.4 0.6 0.8 1
0
0.1
0.2
0.3
0.4
0.5
R
B
r
stainless steel
alumina
glass
mylar
polystyrene
Figure 6.20: The relative stack efciency
R
as a function of the blockage ratio B
r
for several
materials, when T
H
T
C
= 300 K, kx
s
= 0.045, and N
L
= 0.795.
0 0.2 0.4 0.6 0.8 1
0
0.5
1
1.5
2
x 10
6
h
e
a
t
i
n
g
p
o
w
e
r
(
W
)
stainless steel
alumina
glass
mylar
polystyrene
(a)
0 0.2 0.4 0.6 0.8 1
0
0.5
1
1.5
2
x 10
6
a
c
o
u
s
t
i
c
p
o
w
e
r
(
W
)
B
r
stainless steel
alumina
glass
mylar
polystyrene
(b)
Figure 6.21: The (a) supplied heating power and (b) produced acoustic power at the stack as a
function of the blockage ratio B
r
for several materials, when T
H
T
C
= 300 K, kx
s
= 0.045,
and N
L
= 0.795.
112 6.6 Streaming effects in a thermoacoustic stack
6.6 Streaming effects in a thermoacoustic stack
In this section we will try to investigate how the streaming velocity u
2,0
behaves as a
function of N
L
when
M = 0. Waxler [148] examined the streaming velocity within
straight two-dimensional pores using a comparable formal perturbation expansion.
Waxler considered a thermoacoustic stack lled with dry air at room temperature
positioned inside a resonator at /8 from a closed end. Across the stack a temperature
difference of 20K was imposed with the highest temperature at the side of the closed
end. The exact value for the drive ratio and mean pressure were not given and neither
were the stack plate material and thickness. As a result his results cannot be reproduced
exactly . Qualitatively, however, we can compare our results. The parameter values for
our computations are shown in Table 6.4.
Parameter Symbol Value Unit
drive ratio D
r
2 %
mass ux
M 0 kg m/s
speed of sound c 347 m/s
isobaric specic heat C
p
1000 J/(kg K)
isochoric specic heat C
v
714 J/(kg K)
isobaric specic heat solid C
s
1300 J/(kg K)
gas radius R
g
N
L
k
m
plate radius R
s
1.510
5
m
thermal conductivity air K
g
0.0264 W/(m K)
thermal conductivity plate K
s
0.08 W/(m K)
stack length L
s
0.05 m
mean pressure p
0
1.1410
5
Pa
Prandtl number P
r
0.68 -
temperature hot heat exchanger T
H
290 K
temperature cold heat exchanger T
C
270 K
Table 6.4: Parameters: an air-lled parallel-plate stack
Figure 6.22 shows the streaming velocities u
2,0
together with the mass ux m as a
function of X and y in the stack, neglecting gravitational effects (F
r
). In gure 6.23
we zoom in at the center of the stack and show the streaming velocity as a function of y
only. The computations are repeated for various Lautrec numbers ranging between 0.1
and 8. Note that the area in the graph below m is equal to zero so that for every X the
average mass ux is zero.
Just like Waxler we observe several transitions as N
L
increases. For N
L
P
r
, the
velocity is mostly towards the right, where the acoustic wave originates. This is the
regime where the acoustic Bernouilli effect is unimportant. Due to the acoustic source
mass is driven in the direction that acoustic intensity must ow. To maintain the zero
mass ux, the mean velocity must drive the mass back to the left. As N
L
increases,
the Bernoulli effect becomes more important. For N
L
P
r
there is a transition and as
N
L
increases more, boundary layer ow starts to develop. Finally for sufciently large
N
L
, in addition to the boundary-layer ow, the parabolic prole starts to appear that is
typical for wide channels.
Standing-wave devices 113
(a) N
L
= 0.1 (b) N
L
= 0.1
(c) N
L
= 0.7 (d) N
L
= 0.7
(e) N
L
= 2 (f) N
L
= 2
(g) N
L
= 8 (h) N
L
= 8
Figure 6.22: The streaming velocity u
2,0
(left column) and the mass ux m (right column) as a
function of X and y inside the stack. The proles are computed for N
L
varying between 0.1 and
8.
114 6.6 Streaming effects in a thermoacoustic stack
1 0.5 0 0.5 1
3
2
1
0
1
2
x 10
6
y/R
g
u
2
,
0
(
m
/
s
)
N
L
= 0.1
N
L
= 0.7
N
L
= 2
N
L
= 8
Figure 6.23: The streaming velocity prole u
2,0
as a function of y in the center of the stack. The
proles are computed for N
L
varying between 0.1 and 8.
Chapter 7
Traveling-wave devices
Traveling-wave devices come in all sorts and sizes. These can be refrigerators [84, 142],
prime movers [14, 78, 141, 155], or combinations of the two [34, 134, 154]. Ceperley [23]
was the rst to realize that a traveling acoustic wave propagating through a regenerator
undergoes a thermodynamic cycle similar to the Stirling cycle, so that potentially higher
efciencies could be obtained. These concepts were rst transformed into a working
prime mover by Yazaki et al. [155], who managed to design a machine consisting of a
regenerator placed in a looped tube, generating spontaneous traveling-wave gas oscil-
lations around the loop. However, due to the high acoustic velocities there were large
viscous losses, reducing the efciency signicantly. Backhaus and Swift [14] improved
on these ideas by combining the loop with a resonance tube, so that in the loop the
traveling-wave phasing could be obtained, but at low acoustic velocities, thereby ob-
taining efciencies up to 30%.
In this chapter we will present the results from our simulations of a traveling-wave
prime mover similar to that of Backhaus and Swift [14], consisting of a looped tube with
a regenerator and thermal buffer tube, connected to a resonator tube with an acous-
tic load. The usual approach in simulating such devices [14, 34, 76, 78, 141] consists of
providing a geometry and looking for the right values of system parameters such as
frequency, power input and imposed temperature difference that give a stable system.
Here we will employ the opposite approach. We only x the geometry of the regenerator
and thermal buffer tube, and look for an appropriate conguration of the loop and res-
onator that gives us the desired system parameters. Such an approach can be used as a
useful guide for the design of practical devices. Given certain specications, like power-
input, temperature impedance, frequency, drive ratio, and regenerator impedance, the
optimal geometry can be computed. Moreover, the machine can be designed to prevent
the occurrence of mass streaming, which is known to have a negative impact on the
performance.
We will derive an optimization procedure that nds the traveling-wave geometry
that ts given system parameters. In addition we will compute the efciency of the
prime mover, and its sensitivity to the choice of parameters related to the regenerator. It
will follow that this kind of traveling-wave prime mover works potentially much better
than an equivalent standing-wave prime mover.
116 7.1 A traveling-wave prime mover
7.1 A traveling-wave prime mover
We consider a traveling-wave prime mover of the type shown in gure 7.1 (cf. [14]): a
short looped tube attached to a half-wave-length resonance tube with a variable acoustic
load. Within the loop several segments can be distinguished: the regenerator, thermal
buffer tube, T-junction, inertance tube, and compliance. Below we will discuss each of
these segments.
W
load
T
C
T
H
T
C
W
C
W
H
1
2
3
4
5 6
B
A
(b) Detailed drawing of torus section
1
2
(a) Schematic scale drawing of traveling-wave prime mover
Figure 7.1: (a) Schematic scale drawing of a traveling-wave prime mover consisting of a short
looped tube attached to a half-wave-length resonator with variable acoustic load. (b) Detailed
view of torus section that provides sound to the resonator. The system is divided into several
different segments: regenerator (A), thermal buffer tube (B), tube with T-junction (1,2), iner-
tance tube (3), compliance (4), and the resonator (5,6) with acoustic load. The (parallel-plate)
regenerator amplies the sound from
W
C
to
W
H
and
W
load
is supplied to the acoustic load.
Regenerator (A)
Standing-wave devices require stacks that have pores of several penetration depths
wide. Due to the resulting imperfect thermal contact between gas and solid, entropy
is created, so that the ideal Carnot efciency can never be achieved. In traveling-wave
devices regenerators can be used that have pores that are very small compared to the
penetration depth, so that we can make use of the reversible Stirling cycles [23], which
requires the pressure and velocity to be in phase at the regenerator. Furthermore, small
gas velocities are preferred to prevent large amounts of viscous dissipation in the nar-
row regenerator pores. Additionally, we want to maximize the product of pressure and
Traveling-wave devices 117
velocity to maximize the produced acoustic power. It is therefore advantageous to re-
duce the velocity oscillations and increase the pressure oscillations at the regenerator.
For this purpose a resonator is attached in such a way that the loop lies at a velocity
node (and pressure antinode) of the resonator.
We will simulate a helium-lled parallel-plate regenerator made of stainless steel
with heat exchangers on either side. The heat exchangers are used to supply heating
power and amplify the acoustic power from
W
C
at the cold end to
W
H
at the hot end.
The difference between
W
H
and
W
C
is the acoustic power produced by the regenerator
and will be denoted by
W
A
. As in [14] we will start with a porosity B
r
= 0.72 and
Lautrec number N
L
= 0.275. Later we will optimize the geometry and material of the
regenerator to maximize the efciency.
Thermal buffer tube (B)
The thermal buffer tube is used as a thermal buffer between the hot heat exchanger and
the room temperature. Usually its tapered to reduce Rayleigh streaming, but in our
analysis we consider a straight tube for simplicity.
T-junction (1,2,5)
The T-junction connects the loop to the resonator. Part of the sound produced by the
regenerator will be supplied to the resonator and part will be fed back to the loop to
compensate for the wall attenuation. Due to the presence of sharp edges ow sepa-
ration may occur, resulting in vortex shedding and subsequent turbulent dissipation.
Disselhorst and Van Wijngaarden [37] showed that vortex shedding will only take place
if the Strouhal number, pertaining to the radius of curvature of the edges and the acous-
tic velocity amplitude, is smaller than one. In our modeling and simulations we will
ignore such effects.
Inertance tube and compliance (3,4)
Clockwise from the T-junction we have the inertance tube and the compliance that give
a contraction and expansion of the tube. Their lengths and diameters have to be cho-
sen carefully so that the pressure and velocity match periodically across the loop. In
lumped-elements models the inertance tube is modeled as a piston with a certain mass
and the compliance as a large volume at constant pressure.
Resonance tube with acoustic load (5,6)
For the resonance tube we use a straight tube with a variable acoustic load to which
acoustic power
W
load
is supplied. The difference between
W
load
and
W
A
is caused by
wall attenuation in the loop and resonator. In [14] a quarter-wave length resonator is
used with a conical shape to reduce the acoustic velocities, but here we have used a
straight half-wave length resonator to simplify calculations.
The acoustic load is modeled as a narrow channel connected to a large reservoir that
is kept at constant pressure. The highest load efciencies will be obtained when the load
is positioned near the T-junction, but in practice it is necessary to keep some distance
due to the complicated ow patterns around the T-junction. In practical applications the
118 7.2 Computations
T
x
W
C
H
A
W
H
H
B
Q
H
Q
C
1 2 3 4
5
B A
Figure 7.2: Torus section unrolled. We distinguish the regenerator (A), thermal buffer tube (B),
T-junction (1,2,5), inertance tube (3), and the compliance (4). The top graph shows a schematic
temperature prole. In the regenerator the temperature increases and in the thermal buffer tube
the temperature drops back to its original value. Everywhere else the temperature is assumed
constant. Heating power
Q
H
is supplied to the hot end and cooling power
Q
C
is extracted from
the cold end of the regenerator. As a result the acoustic power is amplied by the regenerator
from
W
C
to
W
H
. The total power in the regenerator and thermal buffer tube is denoted by
H
A
and
H
B
, respectively.
load may be replaced by a traveling-wave refrigerator that is driven thermoacoustically
by the prime mover (see e.g. [34]).
7.2 Computations
If we cut the torus in gure 7.1 at the regenerator and unroll the geometry we get a
conguration as shown in gure 7.2. In our computations we will work on the unrolled
geometry and model the ends by periodicity; inuence of edge effects is not taken into
account.
Figure 7.2 also shows the energy ows in and around the regenerator. Heating
power
Q
H
is supplied to the hot end and cooling power
Q
C
is extracted from the cold
end of the regenerator. This leads to a total power
H
A
in the regenerator directed to its
cold heat exchanger and a total power
H
B
inside the thermal buffer directed to its cold
heat exchanger. Moreover, the acoustic power is amplied from
W
C
at the cold end to
W
H
at the hot end. Putting control volumes around the hot and cold heat exchangers
and applying conservation of energy, we nd
Q
C
=
W
C
H
A
,
Q
H
=
H
B
H
A
,
W
A
=
W
H
W
C
, (7.1)
Traveling-wave devices 119
where
W
A
denotes the acoustic power produced by the regenerator. We can now intro-
duce efciencies for the regenerator and acoustic load as
A
=
W
A
Q
H
,
load
=
W
load
Q
H
. (7.2)
The relative efciencies are obtained by dividing by the Carnot efciency
C
,
R
=
C
,
C
=
T
H
T
C
T
H
. (7.3)
The Carnot efciency gives an upper bound for the efciency, so that 0
R
1. As
W
A
will be larger than
W
load
because of wall attenuation, we obtain
load
A
C
.
The computations consist of two parts. First we give the geometry for the regen-
erator and the thermal buffer tube, we impose a impedance and pressure amplitude
at the regenerator, and we impose a temperature difference across the regenerator and
thermal buffer tube. Integration of the system (4.70) will then give the complete veloc-
ity, pressure and temperature prole in the regenerator and thermal buffer tube. From
this we get boundary conditions for the pressure and velocity in the loop and resonator.
As a result of this approach we impose more conditions than available unknowns. We
circumvent this problem, by adapting the geometry parameters of the loop and res-
onator until all boundary conditions are satised. In particular we will vary the radii
and lengths of the various segments.
7.2.1 Regenerator and thermal buffer tube
The rst part of the geometry consists of the regenerator and thermal buffer tube as
depicted in gure 7.2.1. The variables in the regenerator will be indicated by an index
A and in the thermal buffer tube by an an index B.
p
A
u
A
p
B
u
B
T
C
T
H
T
C
A B
Figure 7.3: Regenerator (A) and thermal buffer tube (B).
Left of the regenerator a pressure p
A
and an impedance Z
A
is imposed, which leads
to the following initial conditions:
p
1A
(0) = p
A
, (7.4a)
u
1A
)(0) = u
A
= p
A
/Z
A
. (7.4b)
At the interface between the regenerator and thermal buffer tube we impose continuity
of mass and momentum, which results in continuity of pressure and volumetric velocity,
120 7.2 Computations
so that
p
1A
(1) = p
1B
(0), (7.5a)
u
1A
)(1) =
1
B
r
u
1B
)(0), (7.5b)
where B
r
is the blockage ratio as given in Table 3.1. Additionally, we impose a temper-
ature difference T
H
T
C
across the regenerator and thermal buffer tube,
T
0A
(0) = T
C
, T
0A
(1) = T
H
, (7.6a)
T
0B
(0) = T
H
, T
0B
(1) = T
C
. (7.6b)
Integrating the system of ODEs given in (4.70), subject to these boundary conditions,
we can compute numerically T
0
, p
1
and u
1
) throughout the regenerator and thermal
buffer tube. This will yield a pressure p
B
and velocity u
B
at the end of the thermal
buffer tube. Note that only p
A
and u
A
are imposed; p
B
and u
B
are an outcome of the
computations.
7.2.2 Optimization procedure
Having solved for the regenerator and thermal buffer tube, we still need to model and
simulate the remaining part of the system that is shown in gure 7.4. The lengths (L
j
)
and radii (R
j
) of each segment will be adapted so that all boundary conditions are satis-
ed. The regenerator and thermal buffer tube are kept xed throughout this procedure.
W
load
5 6
1
2
3
4
(p
A
, u
A
)
(p
B
, u
B
)
Figure 7.4: Tube with T-junction, inertance tube, compliance and reso-
nance tube with acoustic load.
Since each segment is a straight tube at constant temperature, we can use the expres-
sions derived in equations (4.75), which express the pressure and velocity in segment j
( j = 1, . . . 6) as
p
1j
(X) = A
j
e
ik
j
X
+ B
j
e
ik
j
X
, 0 X 1, (7.7a)
u
1j
)(X) =
0
c
_
A
j
e
ik
j
X
B
j
e
ik
j
X
_
, 0 X 1, (7.7b)
Traveling-wave devices 121
with A
j
and B
j
integration constants and
j
=
1
c
_
(1 f
j
)
_
1 +
1
1 +
s j
f
k j
_
, (7.8)
k
j
=
j
_
a
3j
a
5j
=
j
c
_
1
1 f
j
_
1 +
1
1 +
s j
f
k j
_
,
j
=
L
j
c
re f
. (7.9)
The unknowns A
j
and B
j
differ in each section and have to be determined from the
boundary and interface conditions. The left and right end of each segment correspond
with X = 0 and X = 1, respectively.
It still remains to model the side branch with acoustic load. The acoustic load is
dissipated via a thin channel leading to a reservoir which is kept at constant pressure.
We can apply Darcys law to relate the pressure p
load
and the velocity u
load
at the load,
u
load
= Z
load
p
load
, (7.10)
where Z
load
is an impedance depending on the area, viscosity, and length of the channel.
We will use p
A
, u
A
, p
B
and u
B
as boundary conditions for the ends of the loop as
indicated in gure 7.4. In addition we will impose continuity of mass and momentum
across every interface. Moreover, at the end of the resonator we have a closed ending,
which results in a zero velocity. This leads to the following set of conditions:
u
B
= u
11
)(0), p
B
= p
11
(0), (7.11a)
u
11
)(1) = b
2
u
12
)(0) + b
5
u
15
)(0), p
11
(1) = p
12
(0) = p
15
(0), (7.11b)
u
12
)(1) = b
3
u
13
)(0), p
12
(1) = p
13
(0), (7.11c)
b
3
u
13
)(1) = b
4
u
14
)(0), p
13
(1) = p
14
(0), (7.11d)
b
4
u
14
)(1) = B
r
u
A
, p
14
(1) = p
A
, (7.11e)
b
5
u
15
)(1) = b
load
u
load
+ b
6
u
16
)(0), p
15
(1) = p
16
(0) = p
load
, (7.11f)
u
16
)(1) = 0. (7.11g)
where b
j
= R
2
j
/R
2
A
gives the ratio between the cross-sectional area of segments j and A.
Substituting (7.7), we nd we have to solve the following equation for the constants A
j
and B
j
:
_
M
0
0 M
+
__
A
B
_
= F (7.12)
with vectors
A =
_
A
1
A
2
A
3
A
4
A
5
A
6
,
B =
_
B
1
B
2
B
3
B
4
B
5
B
6
,
F =
_
p
B
0
cu
B
0 0 0 0 0 0 0 p
A
0
cB
r
u
A
0 p
load
0
cb
load
u
load
0
,
122 7.2 Computations
and matrices
M
=
_
_
1
1
e
ik
1
1
e
ik
1
1
1
e
ik
1
b
2
2
b
5
5
e
ik
2
1
2
e
ik
2
b
3
3
e
ik
3
1
3
e
ik
3
b
4
4
e
ik
4
4
e
ik
4
e
ik
5
1
e
ik
5
5
e
ik
5
b
6
6
e
ik
6
_
_
,
and
M
+
=
_
_
1
1
e
ik
1
1
e
ik
1
1
1
e
ik
1
b
2
2
b
5
5
e
ik
2
1
2
e
ik
2
b
3
3
e
ik
3
1 1
3
e
ik
3
b
4
4
b
4
4
e
ik
4
4
e
ik
4
e
ik
5
1
e
ik
5
5
e
ik
5
b
6
6
e
ik
6
_
_
.
Note that M
, M
+
C
15
C
6
, A, B C
6
, F C
15
. As there are more equations
(15) than unknowns (12) this is an overdetermined system of equations. By variation of
the geometry parameters we will try to minimize the distance between the least-squares
solution and the real solution. In particular we will do this by minimizing the relative
error
RELTOL :=
|(M(M
M)
1
M
I)F|
|F|
, with M :=
_
M
0
0 M
+
_
,
subject to 8 (real) geometry parameters L
1
, L
2
, L
3
, L
4
, b
3
, b
4
, b
5
, Z
load
.
Traveling-wave devices 123
7.3 Results
We have implemented the optimization procedure above using the parameter values
given in Table 7.1. Following Backhaus and Swift [14] we choose 30-bar helium as the
working gas and a stainless-steel regenerator that we model with a parallel-plate ge-
ometry. The regenerator parameters are chosen such that the regenerator has the same
porosity, length, hydraulic radius as in [14]. Additionally the thermal buffer tube has
also been given the same length as in [14]. The geometry parameters of the remaining
segments will be determined from the optimization procedure.
variable value unit
D
r
5 %
Z
A
30
A
c
A
N s m
3
L
A
7.3 cm
L
B
24 cm
R
g
0.42 mm
R
s
0.30 mm
R
A
4.45 cm
R
B
4.45 cm
f 84 Hz
p
0
3.1 10
6
Pa
T
C
300 K
T
H
600 K
M 0 kg s
1
Table 7.1: Input parameters for numerical simulation of regenerator and thermal buffer tube
In the sections below we will rst show what kinds of temperature proles one can
expect in the regenerator and thermal buffer tube, and how they are affected by the
lengths of the components and the presence of mass streaming. Next, we will focus
on the regenerator and try to look for its optimal design that maximizes its efciency.
Finally, we will give the machine geometry that follows from the minimization routine
for the optimal regenerator and thermal-buffer-tube design, and we show the pressure,
velocity, and acoustic-power proles that can be expected throughout the prime mover.
7.3.1 Temperature
In gure 7.5 we show the temperature proles in the regenerator and thermal buffer
tube computed using the parameter values given in Table 7.1. The temperature prole
increases and decreases almost linearly as is commonly assumed.
If the length of the regenerator or thermal buffer tube is changed then a deviation
from the linear temperature prole can occur. This is shown in gure 7.6 where the
temperature is plotted for different lengths of the regenerator or thermal buffer tube.
For very long thermal buffer tubes the temperature even increases rst before dropping
to the low temperature T
C
.
So far we have only considered the case with no streaming, i.e.
M = 0. To show the
effect of streaming on the temperature prole we have plotted for some choices of
M the
124 7.3 Results
0 0.05 0.1 0.15 0.2 0.25 0.3
300
350
400
450
500
550
600
x(m)
m
e
a
n
t
e
m
p
e
r
a
t
u
r
e
(
K
)
A B
Figure 7.5: Mean temperature prole in regenerator (A) and thermal buffer tube (B).
0 0.05 0.1 0.15
300
350
400
450
500
550
600
x(m)
m
e
a
n
t
e
m
p
e
r
a
t
u
r
e
(
K
)
L
s
= 2 cm
L
s
= 4 cm
L
s
= 6 cm
L
s
= 8 cm
L
s
= 10 cm
L
s
= 12 cm
L
s
= 14 cm
(a) regenerator
0.1 0.2 0.3 0.4 0.5 0.6 0.7
300
350
400
450
500
550
600
650
x(m)
m
e
a
n
t
e
m
p
e
r
a
t
u
r
e
(
K
)
L
s
= 10 cm
L
s
= 20 cm
L
s
= 30 cm
L
s
= 40 cm
L
s
= 50 cm
L
s
= 60 cm
(b) thermal buffer tube
Figure 7.6: Mean temperature proles in (a) regenerator and (b) thermal buffer tube. In (a) L
B
was xed at 24 cm and L
A
was varied and in (b) L
A
was xed at 7.3 cm and L
B
was varied.
corresponding temperature distribution in 7.7. As [
M[ increases the temperature prole
in the thermal buffer tube changes from linear to exponential to almost boundary-layer-
like behavior, whereas the regenerator-temperature prole is not affected so much. This
shows that the presence of a mass ux can distort the mean-temperature prole signif-
icantly. This behavior was in fact predicted in Section 4.4.3. It was shown in equations
(4.97)-(4.99) that for a relatively short and wide tube (as we have here) with little or no
mass streaming a linear temperature prole is expected and as the mass ux increases
the temperature distribution will start to look more and more like an exponential prole
Traveling-wave devices 125
until eventually we get
lim
M
2
T
0
(X;
M
2
) =
_
T
H
, X = 0,
T
C
, 0 < X 1,
lim
M
2
T
0
(X;
M
2
) =
_
T
H
, 0 X < 1,
T
C
, X = 1.
The same limiting behavior is observed in gure 7.7. In addition we see that for positive
mass uxes the temperature rst increases before dropping to the low temperature. It
is possible that due to the high positive mass ux, high-temperature gas parcels are
transported away from the hot end whose heat cannot be pumped fast enough to the
cold end, and heat is accumulated near the hot heat exchanger which gives rise to a
temperature increase.
0 0.02 0.04 0.06
300
350
400
450
500
550
600
x(m)
m
e
a
n
t
e
m
p
e
r
a
t
u
r
e
(
K
)
(a) regenerator
M/A
g
= 0.025
M/A
g
= 0.005
M/A
g
= 0.001
M/A
g
= 0
M/A
g
= 0.001
M/A
g
= 0.005
+
M/A
g
= 0.025
0.1 0.15 0.2 0.25 0.3
300
350
400
450
500
550
600
650
x(m)
m
e
a
n
t
e
m
p
e
r
a
t
u
r
e
(
K
)
(b) thermal buffer tube
Figure 7.7: Temperature distributions in (a) regenerator and (b) thermal buffer tube, for different
average mass uxes
M/A
g
[kg s
1
m
2
] through the regenerator.
7.3.2 Regenerator efciency
So far we have used the design parameters for the regenerator and thermal buffer tube
that were also used in [14]. In this section we will look a bit more closely on what
the optimal design is for the regenerator in terms of power-output and efciency. The
efciency in this section will therefore be dened as the relative regenerator efciency
R
=
A
/
C
.
Several parameters will affect the performance of the prime mover. The most im-
portant geometry parameters are the Lautrec number N
L
, the blockage ratio B
r
and the
regenerator length L
A
. Important operating conditions are the impedance Z
A
, the drive
ratio D
r
and the temperature difference T
H
T
C
. In gure 7.8 we show how variation
of these parameters degrades or improves the performance. In all these computations
we have used the parameter values as given in Table 7.1, unless otherwise specied.
126 7.3 Results
0 0.2 0.4 0.6 0.8 1 1.2
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
R
N
L
0.275
(a)
0 0.2 0.4 0.6 0.8 1
0
0.2
0.4
0.6
0.8
B
r
R
0.917
(b)
0 3 6 9 12 15 18
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
R
L
A
6.8
(c)
0 10 20 30 40 50
0
0.2
0.4
0.6
0.8
R
Z
A
/( c)
16.5
(d)
0 0.05 0.1 0.15 0.2
0
0.2
0.4
0.6
0.8
1
R
drive ratio
(e)
0 200 400 600 800 1000
0
0.2
0.4
0.6
0.8
R
temperature difference (K)
233
(f)
Figure 7.8: The relative regenerator efciency as a function of (a) the Lautrec number N
L
(com-
puted at room temperature), (b) the blockage ratio B
r
, (c) the regenerator length L
A
, (d) the
impedance Z
A
, (e) the drive ratio D
r
, and (f) the temperature difference across the stack.
It is well-known that for the optimal working of a traveling-wave device the Lautrec
number should be small, so that there is a perfect thermal contact between the gas and
the wall. In gure 7.8(a) we see that reality is a bit more subtle. Indeed, N
L
should
be smaller than 1, but the optimal value is reached for N
L
0.275 (computed at room
temperature) which corresponds with a hydraulic radius of 42 m, exactly the value as
used in [14]. When N
L
becomes too small the viscous dissipation becomes important
and it starts affecting the performance.
For a given hydraulic radius we can also change the porosity B
r
, which is effectively
Traveling-wave devices 127
the same as changing the thickness of the solid. We see in gure 7.8(b) that the more gas
the better the efciency. However, for high porosities, as the plates become innitely
thin, the efciencies drop back to zero because there is not enough regenerator material
to transport the heat.
The effect of the regenerator length is shown in gure 7.8(c). When the stack is too
short, only a small temperature difference can be achieved and therefore the efciency
will drop also. On the other hand, when the stack is too long, there will be lots of
dissipation, which also reduces the efciency. We see from the graph that the optimal
value is obtained near L
A
= 6.8 cm, which is quite close to the choice of 7.3 cm used
in [14].
We mentioned earlier that for the gas in the regenerator to undergo the ideal Stirling
cycle, it is necessary that the pressure and velocity are in phase. Moreover, the velocity
oscillations should be small to reduce viscous dissipation and the pressure oscillations
should be large to maximize the acoustic power. A trade-off is therefore expected, and
it is shown in gure 7.8(d) that an impedance of Z
A
16.5 c gives the highest efcien-
cies.
Next, in gure 7.8(e), we demonstrate how the efciency is inuenced by the drive
ratio. When the drive ratio is increased at a xed temperature difference, the power
output will increase, but the losses stay the same. As a result we observe higher ef-
ciencies for increasing drive ratios, but as the driver ratios increases more and more, the
efciency proles converge due to the restriction of the Carnot efciency.
Lastly, we mention the impact of the imposed temperature difference. We rst note
that it should be large enough, otherwise the device cannot act as a prime mover; it
follows from 7.8(f) that a minimal temperature difference of approximately 24 K is nec-
essary. The optimal efciency is achieved near 233 K and for larger temperature differ-
ences the efciency starts to decrease slowly.
0.3 0.25 0.2 0.15 0.1 0.05 0 0.05
0.2
0.3
0.4
0.5
0.6
0.7
mass flux (kg/m
2
/s)
R
0
Figure 7.9: The relative regenerator efciency as a function of (d) the average mass ux
M/A
g
[kg s
1
m
2
] through the regenerator.
So far we have neglected the inuence of streaming. If a nonzero mass ux is in-
cluded the efciencies
R
should decrease because when
M ,= 0 a large time-averaged
convective enthalpy ux can arise, mixing gas of different temperatures and degrad-
ing the performance. If we plot the relative efciency as a function of the average
128 7.3 Results
mass ux
M/A
g
through the regenerator (gure 7.9), then we see that this is indeed
the case. As expected, the maximal efciency is obtained when
M = 0 and decreases
rapidly for increasing or decreasing mass ux. The graph does not show values beyond
M/A
g
0.03 kg s
1
m
2
because of numerical difculties; a very steep temperature
prole is necessary (see gure 7.7) to reach the desired low temperature T
C
, which re-
quires a very precise guess of the total power
H
B
.
In all the previous calculations we have used stainless steel for the regenerator ma-
terial. If we want to make a study of what material is best we can repeat the previous
calculations for different materials. In particular we are interested in the effect of the
porosity on the performance. Apart from the material and porosity, the remaining pa-
rameters are chosen as in Table 7.1. In gures 7.10 and 7.11 we have plotted the relative
efciency of the regenerator, the supplied heating power, and the produced acoustic
power as a function the blockage ratio B
r
for stainless steel, alumina ceramics, glass,
mylar, and plastic.
0 0.2 0.4 0.6 0.8 1
0
0.2
0.4
0.6
0.8
1
R
B
r
stainless steel
alumina
glass
mylar
polystyrene
Figure 7.10: The relative regenerator efciency as a function of the blockage ratio B
r
for several
materials.
0 0.2 0.4 0.6 0.8 1
0
200
400
600
800
1000
h
e
a
t
i
n
g
p
o
w
e
r
(
W
)
B
r
stainless steel
alumina
glass
mylar
polystyrene
(a)
0 0.2 0.4 0.6 0.8 1
0
50
100
150
200
250
300
a
c
o
u
s
t
i
c
p
o
w
e
r
(
W
)
B
r
stainless steel
alumina
glass
mylar
polystyrene
(b)
Figure 7.11: The (a) supplied heating power and (b) produced acoustic power at the regenerator
as a function of the blockage ratio B
r
for several materials.
Traveling-wave devices 129
We see that for most materials the optimal efciency is obtained for high porosities,
i.e. very thin stack plates. However, when the plates become too thin (B
r
1), the
efciency drops back to zero again because there is not enough plate material to carry
all the heat. For some materials, such as mylar or plastic straws, a high efciency is
reached for almost all porosities, provided the stack plates are neither too thick (B
r
0)
or too thin (B
r
1). However, although the efciency may be high, low values of B
r
are not practical, as almost no acoustic power is produced (see gure 7.11). We observe
that for all materials the most acoustic power is produced for B
r
between 0.75 and 0.9
with still a relatively high efciency. Depending on whether one is interested more in
high efciencies or high power output it follows that either glass or stainless steel are
the best options for the regenerator material.
We can compare these results to stack efciency of the standing-wave prime mover
simulated in Section 6.5, whose conguration has also been optimized to obtain maxi-
mal efciencies under the same operating conditions. Comparing gures 6.20 and 7.10 it
follows that the efciencies for the traveling-wave conguration are about twice as high
as those of the standing-wave conguration. Furthermore, as opposed to the standing-
wave conguration, the choice of material is much more critical for the regenerator,
especially at low porosities.
7.3.3 Geometry optimization
In this section we will determine the geometry for the loop and resonator that ts the
regenerator and thermal buffer tube given by the input parameters in Table 7.2. We used
the results from gure 7.8 to choose the optimal design that for a temperature difference
of 300 K and drive ratio of 5% maximizes the regenerator efciency, i.e. B
r
= 0.917,
N
L
= 0.275, L
A
= 6.8cm, Z
A
= 16.5c, and
M = 0. Using MATLABs lsqnonlin we
have minimized RELTOL by careful choice of the parameters L
1
, L
2
, L
3
, L
4
, b
3
, b
4
, b
5
, and
Z
load
, subject to the the constraints that all parameters be positive, b
3
< 1 (contraction),
and b
4
> 1 (expansion).
The routine converged with a relative error of approximately 4 10
8
and yielded
the geometry given in gure 7.12 and Table 7.2. This choice of loop and resonator gives
a machine (load) efciency of 0.35. Note that viscous dissipation due to interaction
with the wall is included in all segments. Although the addition of viscous dissipations
affects the wave number only slightly (e.g. k
1
= 0.5172 vs. k
1
= 0.5185 0.0007i), it has
a signicant impact on the performance of the device. Most importantly the efciency
is affected, which decreases from 0.39 at the regenerator to 0.35 at the load. Also the
acoustic power
W
load
provided to the load is reduced signicantly from
W
A
that was
generated by the regenerator.
It should be noted that the minimization procedure is quite sensitive to the initial
guess. Because we have so many geometry parameters to choose (more than available
unknowns), different geometries might work. Small changes in the initial guess can
lead to very different geometries and some of these can be quite unrealistic, e.g. a very
short and wide compliance or a very thin and long inertance tube.
In gure 7.13 we show the acoustic power as a function of its position in the prime
mover. Within the regenerator there is a sharp amplication of the sound and there is an
increase in acoustic power of about
W
A
= 211 W. Some of this is lost in the loop due to
viscous dissipation, and 206 W is supplied to the resonator, which explains the drop in
130 7.3 Results
Input Output
variable value unit variable value unit
D
r
5 % L
1
14.1 cm
Z
A
/(
A
c
A
) 16.5 - L
2
15.9 cm
L
A
6.8 cm L
3
18.0 cm
L
B
24 cm L
4
20.3 cm
L
5
/ 1/8 - R
3
2.93 cm
L
6
/ 1/2 - R
4
4.96 cm
R
g
42.1 m R
5
3.23 cm
R
s
3.81 m
H
A
123 W
R
A
4.45 cm
H
B
661 W
R
B
4.45 cm
Q
H
538 W
R
1
4.45 cm
W
A
211 W
R
load
9.94 mm
W
load
185 W
f 84 Hz
A
0.39 -
p
0
3.1 10
6
Pa
load
0.35 -
T
C
300 K
A,R
0.79 -
T
H
600 K
load,R
0.69 -
M 0 kg s
1
RELTOL 4.14 10
8
-
Table 7.2: Input and output parameters of minimization routine.
A
B
1
2
3
4
load
5 6
1 m
Figure 7.12: Scaled version of geometry obtained from minimization routine. From top to bot-
tom and left to right we have: regenerator (A), thermal buffer tube (B), tube with T-junction
(1,2), inertance tube (3), compliance (4), resonator with load (5,6). The input and output param-
eters are given in Tables 7.1 and 7.2.
W at the T-junction. Inside the resonator there is dissipation as well, so that eventually
an amount of
W
load
= 185 W can be provided to the acoustic load.
Next, in gures 7.14-7.17 we show the volumetric velocity A
g
u
1
) and the pressure
p
1
all along the system. At the regenerator we have a small velocity, a large pressure
and a real impedance. The length of the whole loop is much smaller than a wave length,
and it is positioned near a pressure antinode of the resonator, so that the pressure is
approximately constant in the loop and the velocity close to zero. At the T-junction
there is a drop in A
g
u
1
) due to the ow into the resonator.
Traveling-wave devices 131
0 0.2 0.4 0.6 0.8 1
400
450
500
550
600
650
700
x(m)
a
c
o
u
s
t
i
c
p
o
w
e
r
(
W
)
A
B 1
2 3 4
(a) in loop
0 1 2 3 4 5 6
0
50
100
150
200
250
x(m)
a
c
o
u
s
t
i
c
p
o
w
e
r
(
W
)
5
6
(b) in resonator
Figure 7.13: Acoustic power as a function of the position in the prime mover.
0 0.2 0.4 0.6 0.8 1
5
6
7
8
9
10
x 10
3
x(m)
R
e
(
A
g
<
u
1
>
)
(
m
3
/
s
)
A
B
1
2
3 4
(a) Re
_
A
g
u
1
)
_
0 0.2 0.4 0.6 0.8 1
0.06
0.04
0.02
0
0.02
0.04
0.06
x(m)
I
m
(
A
g
<
u
1
>
)
(
m
3
/
s
)
A
B
1
2 3
4
(b) Im
_
A
g
u
1
)
_
Figure 7.14: Real and imaginary part of volumetric velocity as a function of the position in the
loop.
0 2 4 6 8
4
2
0
2
4
6
x 10
3
x(m)
R
e
(
A
g
U
1
)
(
m
3
/
s
)
5
6
(a) Re
_
A
g
u
1
)
_
0 1 2 3 4 5 6
0.14
0.12
0.1
0.08
0.06
0.04
0.02
0
x(m)
I
m
(
A
g
U
1
)
(
m
3
/
s
)
5
6
(b) Im
_
A
g
u
1
)
_
Figure 7.15: Real and imaginary part of volumetric velocity as a function of the position in the
resonance tube.
132 7.3 Results
0 0.2 0.4 0.6 0.8 1
1.46
1.48
1.5
1.52
1.54
1.56
x 10
5
x(m)
R
e
(
p
1
)
(
P
a
)A
B
1
2
3
4
(a) Re
_
p
1
_
0 0.2 0.4 0.6 0.8 1
500
0
500
1000
1500
2000
2500
3000
x(m)
I
m
(
p
1
)
(
P
a
)
A
B
1
2
3
4
(b) Im
_
p
1
_
Figure 7.16: Real and imaginary part of acoustic pressure as a function of the position in the
loop.
0 1 2 3 4 5 6
0
5
10
15
x 10
4
x(m)
R
e
(
p
1
)
(
P
a
)
5
6
(a) Re
_
p
1
_
0 1 2 3 4 5 6
3000
2000
1000
0
1000
2000
3000
4000
x(m)
I
m
(
p
1
)
(
P
a
)
5
6
(b) Im
_
p
1
_
Figure 7.17: Real and imaginary part of acoustic pressure as a function of the position in the
resonance tube.
Chapter 8
Nonlinear standing waves
It is well-known [28, 32, 33, 39] that disturbances can arise in a closed tube, when a pis-
ton supplies oscillations at or near a resonance frequency. In particular shock waves
may occur, or deformed sinusoidal proles. Nonlinear standing waves may also occur
in practical thermoacoustic devices, where high amplitudes are quite common. Highly
nonlinear acoustic-wave forms have been observed experimentally [10], arising due to
generation of higher harmonics and generating losses that degrade the performance.
Dequand et al. [36] also observed shock formation in side-branch systems of the type
shown in Figure 1.9. Replacing the thermoacoustic stack by a piston, Gaitan and Atch-
ley [43] analyzed the energy transfer into the higher harmonics for a prime-mover con-
guration and showed that it can be partly suppressed by varying the cross-section of
the prime mover. Hoers refrigerator (Figure 1.4) also uses a variable cross-section
with a horn and reservoir to avoid the formation of shock waves.
An elaborate theoretical model for calculating nonlinear disturbances (both shock
and pre-shock) in closed tubes was derived by Chester [28] and improved upon by var-
ious others [62, 65, 93, 94, 144]. Chesters model includes effects of compressive viscosity
and of shear viscosity in the boundary layers near the walls, and starts from the fun-
damental one-dimensional hydrodynamic equations with a correction for wall friction
using boundary-layer equations.
Coppens and Sanders [32] derive a one-dimensional nonlinear acoustic-wave equa-
tion describing nite-amplitude (pre-shock) standing waves in closed tubes. Using a
perturbation expansion they arrive at a set of linear equations that need to be solved it-
eratively. This was later extended [33] to a three-dimensional model for acoustic waves
in lossy cavities.
Menguy and Gilbert [87] have also analyzed nonlinear oscillations in gas-lled tubes,
both theoretically and experimentally. In their approach several small parameters are
identied and a multiple-scales perturbation solution is attempted. Starting from the
Navier-Stokes equations, two generalized Burgers equations are derived that describe
the propagation of a weakly nonlinear acoustic wave propagating in a cylindrical tube
before shock formation. These equations are solved numerically to second order using
truncated Fourier series, while allowing for arbitrary boundary conditions. Finally, the
results are successfully validated against experimental results for standing-wave and
traveling-wave congurations.
134 8.1 Governing equations
Much of the later work on nonlinear standing waves [1, 31, 39, 51, 60, 94, 122] starts
with the Kuznetsovs equation [70], a single second-order nonlinear wave equation that
describes the nonlinear propagation of sound in a dissipative and irrotational medium.
Neglecting wall friction, Eno and Hedberg [40] used Kuznetsovs equation to derive a
one-dimensional evolution equation for the velocity potential and found a steady-state
solution also using a multiple-scales approach. The main difference with the analysis
of Menguy and Gilbert [87] is the assumption of irrotational ow, which allows for the
computation of an analytical solution.
Makarov and Ochmann [82, 83, 96] have written an extensive three-part review on
all modern investigations of nonlinear and thermoviscous phenomena in acoustic elds
in uids. They treat [83] various nonlinear evolution equations, most of which start
from the simple wave equation with nonlinear source terms. In particular they also go
into the Kuznetsov equation and the Khokhlov-Zabolotskaya-Kuznetsov (KZK) equa-
tion which is a generalization of the Kuznetsov equation and includes the effect of weak
diffraction. Ochmann and Makarov [96] also address the topic of thermoacoustic vibra-
tions in a closed pipe with an innitesimally thin heater located in the center of the pipe.
By relating the heat release of the heater to the pressure uctuations, shock waves can
be predicted [29, 30].
In this chapter we will try to predict the wave forms that may arise when a ther-
moacoustic refrigerator or prime mover is excited near its resonance frequency. Only
wide tubes are considered with uniform cross-sections in which the viscous interaction
with the wall can be neglected. We generalize the approach of Eno and Hedberg [40]
to predict the nonlinear wave proles when a thermoacoustic stack is placed inside the
tube. As in [40] we will use Kuznetsovs equation to determine the sound eld in the
tube, but with a reection condition to simulate the presence of a thermoacoustic stack.
Gusev et al. [49] also use a reection condition to model a prime mover, but assume that
the sound eld inside the stack is not affected by the nonlinearities.
8.1 Governing equations
To simplify analysis we assume irrotational ow, i.e. v = 0. As a result the ow
velocity can be described as the gradient of a velocity potential,
v = .
The assumption of irrotational ow is correct, provided the viscous interaction with the
wall can be neglected. This is indeed the case, since we consider wide and straight tubes
with negligible wall dissipation. Moreover, we consider such cases in which the wall
dissipation can be neglected with respect to the dissipation in the shock.
8.1.1 Kuznetsovs equation
We start from the Kuznetsov equation [70], which is given by
t
2
c
2
0
2
=
t
_
()
2
+
1
2c
2
0
( 1)
_
t
_
2
+
b
_
, (8.1)
Nonlinear standing waves 135
where c
0
and
0
are the equilibrium values of the speed of sound and density of the
uid, independent of x, and b is a constant that represents the total effect of viscosity
and heat conduction,
b = K
_
1
C
v
1
C
p
_
+
4
3
+.
As before is dened as the ratio of the specic heats
=
C
p
C
v
.
Let the ends of the tube be denoted by x = 0 and x = L. From here on we will
restrict ourselves to one space dimension with the velocity u = /x as dependent
variable,
t
2
c
2
0
x
2
=
t
_
_
x
_
2
+
1
2c
2
0
( 1)
_
t
_
2
+
b
x
2
_
. (8.2)
If the left end of the tube is closed then a zero velocity is imposed
u(0, t) = 0.
It follows that the sound reects at x = 0 with reection coefcient R = 1. We will now
model the presence of a stack at x = 0 by requiring the wave to reect effectively at a
point L < 0 with reection coefcient R
0
,
R(L, t) = R
0
.
Depending on how much sound is dissipated in the stack R
0
will vary between 0 (very
dense stack) and 1 (no stack). Assuming a short stack with relatively wide pores one
can expect that R
0
will be close to 1. At x = L we impose an excitation h with angular
frequency and amplitude U.
u(L, t) = Uh(t) = h(t).
where is the maximal displacement of the excitation. The sound source will be mod-
eled by putting h(t) = sin(t).
We next rescale
x = L x, t =
L
c
0
t, u = c
0
u, = Lc
0
, p =
0
c
2
0
p.
The relevant dimensionless numbers for this problem are
=
U
c
0
, =
2
Lb
2
0
c
3
0
, =
L
c
0
, =
+ 1
2
, =
C
p
C
v
, (8.3a)
= 1 R
0
,
0
= (1 +),
0
=(1 +), =
0
. (8.3b)
136 8.1 Governing equations
Dropping the tildes we arrive at the following boundary value problem:
t
2
2
x
2
=
t
_
_
x
_
2
+
1
2
_
t
_
2
+
2
x
2
_
, (8.4)
subject to
R(, t) = R
0
, (8.5a)
u(1, t) =
x
(1, t) =h(t). (8.5b)
8.1.2 Bernoullis equation
If the density is assumed constant and gravity is neglected, the momentum balance
as part of the Euler equations can be integrated to Bernoullis equation for unsteady
potential ow
t
+
1
2
u
2
+
p
0
= C, (8.5c)
where C only depends on time. Therefore the pressure p can be expressed in and u as
p =
0
_
C
1
2
u
2
t
_
. (8.5d)
With the rescaling given above, we nd that the dimensionless pressure is given by
p(x, t) = C(t)
t
(x, t)
1
2
u
2
(x, t). (8.6)
8.1.3 Perturbation expansion
We will use the smallness of , , , , and to nd an approximate solution correct up
to second order in these small parameters. To make a small-parameter analysis possible
we will use as the small parameter and relate , and to . First, assuming is
small, we expand
(x, t; ) =(x, t) +
2
(x, t) +O(
3
), 1. (8.7)
Substituting the expansion into (8.4) we nd that to leading order
t
2
2
x
2
= 0, 1, 1.
The general solution is given as a sum of left and right-running waves
(x, t) = F
1
(t x) + F
2
(t + x), (8.8)
Nonlinear standing waves 137
for still arbitrary functions F
1
and F
2
. Next assuming = O() and collecting the rst-
order terms in and , we nd
t
2
2
x
2
= ( + 1)
_
f
1
(t x) f
1
(t x) + f
2
(t + x) f
2
(t + x)
_
+ ( 3)
_
f
1
(t x) f
2
(t + x) + f
1
(t x) f
2
(t + x)
_
+
2
2
_
f
1
(t x) + f
2
(t + x)
_
.
where f
1,2
F
1,2
. If we change to the variables
= t x, = t + x, (8.9)
then we nd
4
2
= ( + 1)
_
f
1
() f
1
() + f
2
() f
2
()
_
+ ( 3)
_
f
1
() f
2
() + f
1
() f
2
()
_
+
2
2
_
f
1
() + f
2
()
_
.
Integrating with respect to and we nd
4(, ) =
+ 1
2
_
f
2
1
() + f
2
2
()
_
+ ( 3)
_
F
1
() f
2
() + f
1
()F
2
()
_
+ 2
2
_
f
1
() + f
2
()
_
+ A() + B().
A suitable redenition of the integration constants
A() :=
+ 1
2
f
2
1
()
2
2
f
1
() + G
1
(),
B() :=
+ 1
2
f
2
2
()
2
2
f
2
() + G
2
(),
leads to
(x, t) = G
1
(t x) + G
2
(t + x) +
+ 1
4
x
_
f
2
1
(t x) + f
2
2
(t + x)
_
+
3
4
_
F
1
(t x) f
2
(t + x) + f
1
(t x)F
2
(t + x)
_
+
2
x
_
f
1
(t x) + f
2
(t + x)
_
. (8.10)
138 8.1 Governing equations
and
(x, t) =
_
F
1
(t x) + F
2
(t + x)
_
+
2
_
G
1
(t x) + G
2
(t + x)
_
+
2
+ 1
4
x
_
f
2
1
(t x) f
2
2
(t + x)
_
+
2
3
4
_
F
1
(t x) f
2
(t + x) + f
1
(t x)F
2
(t + x)
_
+
2
x
_
f
1
(t x) f
2
(t + x)
_
+O(
3
), (8.11)
so that
u(x, t) =
_
f
1
(t x) f
2
(t + x)
_
+
2
_
g
1
(t x) g
2
(t + x)
_
2
+ 1
4
__
f
2
1
(t x) f
2
2
(t + x)
_
2x
_
f
1
(t x) f
1
(t x) + f
2
(t + x) f
2
(t + x)
__
2
3
4
_
F
1
(t x) f
2
(t + x) f
1
(t x)F
2
(t + x)
_
2
_
f
1
(t x) f
2
(t + x) x
_
f
1
(t x) + f
2
(t + x)
__
+O(
3
). (8.12)
Note that some of the second-order terms on the right hand side are of the same form.
We can therefore redene g
i
as
g
i
(t) := g
i
(t)
_
+ 1
4
f
2
i
(t) +
i
(t)
_
, i = 1, 2,
and nd
u(x, t) =
_
f
1
(t x) f
2
(t + x)
_
+
2
_
g
1
(t x) g
2
(t + x)
_
+
2
+ 1
2
x
_
f
1
(t x) f
1
(t x) + f
2
(t + x) f
2
(t + x)
_
+
2
3
4
_
f
1
(t x)F
2
(t + x) F
1
(t x) f
2
(t + x)
_
+
2
x
_
f
1
(t x) + f
2
(t + x)
_
+O(
3
). (8.13)
In [39] a zero velocity was imposed at x = 0, so that f
1
= f
2
and g
1
= g
2
. Here
the situation is a bit different due to condition (8.5a). It assumes that because of the
presence of the stack the left-running wave is effectively reected at some point 0
with reduced amplitude R
0
. As a result we can put
f
1
(t x) = f (t x), f
2
(t + x) = f (t + x), x = x +, (8.14)
g
1
(t x) = g(t x), g
2
(t + x) = g(t + x), (8.15)
Nonlinear standing waves 139
where f and g are yet to be determined. Thus we can write for u
u(x, t) =
_
R
0
f (t x) f (t + x)
_
+
2
x
_
R
2
0
f (t x) f
(t x) + f (t + x) f
(t + x)
_
+
2
3
4
R
0
_
f
(t x)F(t + x) F(t x) f
(t + x)
_
(8.16)
+
2
x
_
R
0
f
(t x) + f
(t + x)
_
+
2
_
R
0
g(t x) g(t + x)
_
+O(
3
).
The remaining boundary condition (8.5b) can be used to derive an equation for the
unknown functions f and g,
h(t) =
_
R
0
f (t t
0
) f (t + t
0
)
_
+t
0
_
R
2
0
f (t t
0
) f
(t t
0
) + f (t + t
0
) f
(t + t
0
)
_
+
3
4
_
R
0
f
(t t
0
)F(t + t
0
) F(t t
0
) f
(t + t
0
)
_
+
0
2
_
R
0
f
(t t
0
) + f
(t + t
0
)
_
+
_
R
0
g(t t
0
) g(t + t
0
)
_
+O(
2
), (8.17)
where t
0
= 1 +.
In the sections below we will solve this equation for two cases; we rst look for a
solution away from resonance for an arbitrary excitation h and R
0
= t
0
= 1, and next
we look for a solution near resonance with h(t) = sin(t) and arbitrary R
0
and t
0
. Having
done that we can use the second solution to determine the sound eld between the right
stack end and the piston when the tube is near resonance and the rst solution can be
used to determine the sound eld between the closed end (with R
0
= t
0
= 1) and the
left stack end.
8.2 Solution away from resonance
Depending on the order of magnitude of , , and , different approximations to (8.17)
are possible. We assume , = O() and introduce
=
,
=
. (8.18)
Moreover, for the subsequent analysis we also need
0
,= n, n Z. (8.19)
The last condition implies that we have to stay away from resonance ( ,= 0) and is
necessary to avoid division by zero. Below we will consider two cases; rst for arbitrary
excitation h and then for harmonic excitation h(t) = sin(t).
140 8.2 Solution away from resonance
8.2.1 Arbitrary excitation
Substituting (8.18), we nd that (8.17) transforms into
h(t) =
_
f (t t
0
) f (t + t
0
)
_
+t
0
_
f (t t
0
) f
(t t
0
) + f (t + t
0
) f
(t + t
0
)
_
2
f (t t
0
) +
3
4
_
f
(t t
0
)F(t + t
0
) F(t t
0
) f
(t + t
0
)
_
+
0
2
_
f
(t t
0
) + f
(t + t
0
)
_
+
_
g(t t
0
) g(t + t
0
)
_
+O(
2
). (8.20)
Setting = 0 we nd to leading order
f (t t
0
) f (t + t
0
) = h(t).
We will look for a solution to this equation in the frequency domain. Taking the Fourier
transformT we nd
2i sin(t
0
) [T f ] () =
1
[Th]
_
_
. (8.21)
Rearranging terms and taking the inverse Fourier transformT
1
, we obtain
f (t) =
_
T
1
A
_
(t) +
n=
a
n
e
int/t
0
, A() =
i [Th] ()
2 sin(t
0
)
, (8.22)
where the second term is a solution of the homogeneous problem. From causality argu-
ments we conclude that a
n
= 0 for all n.
Next, collecting the second-order terms, we nd
g(t t
0
) g(t + t
0
) = 2
f (t t
0
) t
0
_
f (t t
0
) f
(t t
0
) + f (t + t
0
) f
(t + t
0
)
_
2
_
f
(t t
0
) + f
(t + t
0
)
_
2
2
_
f
(t t
0
)F(t + t
0
) F(t t
0
) f
(t + t
0
)
_
.
Taking the Fourier transform on either side, we nd
2i sin(t
0
) [Tg] () = [Tk] (), (8.23)
with
k(t) = 2
f (t t
0
) t
0
_
f (t t
0
) f
(t t
0
) + f (t + t
0
) f
(t + t
0
)
_
2
_
f
(t t
0
) + f
(t + t
0
)
_
2
2
_
f
(t t
0
)F(t + t
0
) F(t t
0
) f
(t + t
0
)
_
.
Finally, applying the inverse Fourier transform we obtain
g(t) =
_
T
1
B
_
(t), B() =
i [Tk] ()
2 sin(t
0
)
. (8.24)
Nonlinear standing waves 141
8.2.2 Harmonic excitation
Substituting h(t) = sin(t) into (8.21), we nd
[T f ] () =
2
4 sin(t
0
)
[(+) ()] =
2
4 sin(
0
)
[(+) +()] .
Here and below() is used to denote the -function and is not to be confused with the
constant dened in (8.3). We can take the inverse Fourier transform and nd
f (t) =
cos(t)
2 sin(
0
)
. (8.25)
Next, substituting f into (8.23), we obtain
[Tg] () =
0
8 sin(2
0
) tan(
0
)
2
2
[(+ 2) +(2)]
(
0
+
)
2 sin(
0
) tan(
0
)
2i
2
[(+) ()]
+
2 sin(
0
)
2
2
[(+) +()] .
Finally, applying the inverse Fourier transform we obtain
g(t) =
0
4
cos(2t)
sin
2
(
0
)
0
+
2
cos(
0
) sin(t)
sin
2
(
0
)
+
2
cos(t)
sin(
0
)
. (8.26)
The full solution, correct up to second order in , can be found by substituting f and g
into (8.16). For example, if we use only the leading-order terms, we nd
u(x, t) = [ f (t x) f (t +x)] + o()
=
sin(x)
sin(
0
)
sin(t) + o(). (8.27)
For t
0
= 0 this coincides with the standard solution for the sound eld in closed tubes
without wall friction.
8.3 Solution near resonance
In the previous section we showed how equation (8.4) can be solved using Fourier trans-
formations, provided one stays away from resonance. In this section we will show that
under certain conditions we can nd a solution near resonance using matched asymp-
totic expansions.
With the substitution
f (t) = v(t), g(t) = w(t), v
= v,
1
=t
0
,
2
=t +
0
,
142 8.3 Solution near resonance
we arrive at the following equation
h(t) =
_
R
0
v(
1
) v(
2
)
_
+
0
_
R
2
0
v(
1
)v
(
1
) + v(
2
)v
(
2
)
_
+
0
_
R
0
v
(
1
) + v
(
2
)
_
+R
0
2
2
_
v
(
1
) v(
2
) v(
1
)v
(
2
)
_
+
_
R
0
w(
1
) w(
2
)
_
+ o(). (8.28)
When approaches the rst resonance frequency, in the sense that 1, we can nd
an approximate solution to (8.28). Since =
0
, we have
1
=t ,
2
=t + +.
Moreover, we can substitute for v(
1
) v(
2
) the difference of their series expansion
v(
1
) v(
2
) = v(t ) v(t +)
_
v
(t ) + v
(t +)
, 1.
If h is a periodic excitation near resonance, we can expect the function v to be almost
periodic. We model this by introducing two time scales,
=t +, T =t, v(, T) = v(),
where is the fast time and T is the slow time. We then assume that the deviation
from periodicity occurs in the slow time scale and not in the fast time scale, so that
v(, T) = v( 2, T). Dropping the tildes, we can now write
v( 2, T 2) = v( 2, T) 2
v
T
( 2, T)
= v(, T) 2
v
T
(, T), 1.
As a result we have
v(t +) v(t ) = v(, T) v( 2, T 2) = 2
v
T
(, T), 1,
and
v(
1
) v(
2
) = 2
v
T
(, T) 2
v
(, T), , 1. (8.29)
Inserting (8.29) into (8.28) and putting R
0
= 1 , we nd
h( ) = 2
v
T
2
v
v + 2
0
v
v
+ 2
0
2
v
2
+ o(, ,
0
, ). (8.30)
It follows that to match the left and right hand side of the equation, we need to rescale
Nonlinear standing waves 143
v. We introduce V by
v(, T) =
0
+
0
V(z, T), z =
2
,
This rescaling does not violate the asymptotic expansion given in (8.7) since 1. We
nd that (8.30) transforms into
V
V
z
+
_
1
2
2
V
z
2
0
V
2
0
0
V
T
_
=
1
2
h(2z ), (8.31)
where
=
2
0
2
0
.
In Section 8.3.1 we will give an analytical (z, T)-dependent solution for the case
=
= 0, derived by Rudenko et al. [122].
We conclude from (8.31) that the effects of the stack (), resonance (), viscosity (
0
),
and nonlinearity () are balanced with the energy inow (h), when
0
.
However, with this ordering of dimensionless parameters it is not possible to derive an
analytic solution to (8.31). If instead we assume
0
, 1,
then a steady-state solution (T ) can be determined using the smallness of . At
T a steady-state eld is reached due to the interaction of dissipation, nonlinear
losses and energy inow from the the source. Setting
T
= 0, putting h() = sin(),
and introducing
0
,
=
0
,
we nd
2V
dV
z
+
_
d
2
V
z
2
2
V
_
2
2
= sin(2z). (8.32)
In Section 8.3.2 we will derive a solution using matched asymptotic expansions, when
,
= O(1). Next in Section 8.3.3 we show numerically how the solution changes when
the dissipation due to the stack is increased such that
= O(
1
).
8.3.1 Exact solution when
=
= 0 using Mathieu functions
Consider a closed tube at resonance ( = 0), periodically excited (h(t) = sin(t)), and
without a stack ( = = 0). For this case it was shown by Rudenko et al. [64, 122] that
the solution to (8.31) with zero initial condition v(T = 0, ) = 0 can be written in terms
144 8.3 Solution near resonance
of periodic Mathieu functions:
V(z, T) =
n=0
a
n
exp
_
2n
4
T
_
CE
2n
(z, q) , (8.33)
where
a
2n
=
_
2
0
CE
0
_
2
, q
_
d
_
2
0
CE
2
2n
_
2
, q
_
d
, q =
2
2
=
1
4
2
,
and
2n
is the characteristic eigenvalue corresponding to the periodic Mathieu eigen-
function CE
2n
in the notation of Abramowitz and Stegun [3]. In particular when q 1
we can write
0
= 2q + 2
q
1
4
1
32
q
+ .
The solution above simplies in a few special cases. In the limit for T a steady-
state solution is approached and
v() =
2
d
d
ln CE
0
_
2
, q
_
. (8.34)
Since we assume 1 we also have q 1. As a result v can be approximated by [3]
v() =
_
cos
_
2
_
2 exp
_
2
q
_
1 + 2 exp
_
2
q
_
_
, 0 , (8.35)
so that for q ( 0) we nd
v() =
cos
_
2
_
sgn(), . (8.36)
8.3.2 Steady-state solution for
= O(1)
Assuming
,
= O(1), we can use the smallness of to nd an approximate solution
using the method of matched asymptotic expansions [57]. First we look for an outer
solution
V that is valid outside a narrow region around some point z
i
(/2, /2).
Then we look for an inner solution
V that is valid within this small region. A combina-
tion of these two solution will give the full composite expansion.
We need some boundary conditions to guarantee a unique solution. A natural con-
dition would be
V(/2) = V(/2), (8.37)
so that in resonance, when = 0, v wil be periodic as well. Moreover, in the transi-
tion point we will assume V(z
i
) = 0 for reasons of symmetry. The location z
i
will be
determined from the matching conditions for
V and
V in the intermediate region.
We expand the outer solution in powers of ,
V =
V
0
+
V
1
+ , 1.
Nonlinear standing waves 145
Inserting the expansions into (8.32) and collecting the terms of order
0
and
1
, we nd
2
V
0
d
V
0
dz
= sin(2z), (8.38)
d
2
V
0
dz
2
+ 2
d
V
0
V
1
dz
2
V
0
= 0. (8.39)
Integrating (8.38) we nd
V
0
=
_
cos
2
(z) + C
0
. (8.40)
where C
0
is a constant of integration. Applying condition (8.37), we nd that C
0
= 0
and
V
0
= cos(z). (8.41)
We see that two possible solutions for
V
0
exist. Now before we go to
V
1
, we will
rst turn to the inner solution. We expect that in the narrow region around z
i
there will
be a transition between the - and the + solution. Therefore an inner solution
V is
introduced as
V(z) =
V(s), s =
z z
i
.
Substitution into equation (8.32) yields
d
2
V
ds
2
+ 2V
dV
ds
2
2
V = sin(2z
i
+ 2s) + 2
3
, 1. (8.42)
Again we expand in powers of ,
V(s) =
V
0
(s) +
V
1
(s) + , 1.
It turns out that to nd a solution we need to let z
i
depend on and we expand
z
i
= z
i
0
+z
i
1
+ , 1.
Next we substitute the expansion and equate the coefcients of
0
and
1
to nd
d
2
V
0
ds
2
+ 2
V
0
d
V
0
ds
= 0, (8.43)
d
2
V
1
ds
2
+ 2
d
V
0
V
1
ds
= sin(2z
i
0
). (8.44)
We integrate (8.43) subject to
V(0) = 0. By separation of variables we nd
V
0
= a
0
tanh (a
0
s) , (8.45)
where a
0
is yet to be determined. We can determine a
0
by matching the inner solution
146 8.3 Solution near resonance
V
0
to the outer solution
V
0
found above. Taking the limit for s , we observe that
lim
s
V
0
= [a
0
[, lim
s+
V
0
= [a
0
[,
and we see that the inner solution
V
0
and outer solution
V
0
match, provided the change
is from the - solution to the + solution and a
0
= cos(z
i
0
) 0. Summarizing, we
nd
V
0
(z) =
_
cos(z), < z
i
,
cos(z), > z
i
,
(8.46)
provided z
i
stays away from/2. Furthermore
V
0
(s) = a
0
tanh [a
0
s] , a
0
= cos(z
i
0
). (8.47)
Next we will compute the rst-order terms. Substituting
V
0
into (8.39), we nd after
integration
V
1
=
1
2
C
1
cos(z)
+
1
2
_
1 + 2
_
tan(z). (8.48)
Applying (8.37), we obtain C
1
= 1 2
and
V
1
(z) =
_
_
_
1 + 2
_
sin(z) + 1
2 cos(z)
, < z
i
,
_
1 + 2
_
sin(z) 1
2 cos(z)
, > z
i
.
(8.49)
Note that only this choice for C
1
cancels the singularity that would otherwise arise in
z = /2. It still remains to determine
V
1
. We integrate (8.44) once with respect to s
and apply the integrating factor
exp
_
2
_
V
0
ds
_
= cosh
2
(a
0
s).
We can then rewrite (8.44) as
d
ds
_
cosh
2
(a
0
s)
V
1
_
= s sin(2z
i
0
) cosh
2
(a
0
s) B
1
cosh
2
(a
0
s),
where B
1
is a constant of integration. Integrating once again with respect to s, we get
V
1
=
1
cosh
2
(a
0
s)
_
sin(2z
i
0
)
s
2
4
B
1
s
2
+
sin(2z
i
0
)
8a
2
0
[cosh (2a
0
s) 1]
1
4a
0
_
B
1
+ sin(2z
i
0
)s
sinh (2a
0
s)
_
.
However, the rst-order outer and inner solution do not necessarily attain a common
limit as is the case for the zeroth-order terms. We will show that they only match when
Nonlinear standing waves 147
sin(2z
i
0
) is close to zero, thereby xing z
i
0
. For this purpose we introduce an intermedi-
ate variable
=
z z
i
()
=
()
s, () 1,
that is positioned between the O(1) coordinate of the outer layer and the O() coordi-
nate of the inner layer. We therefore assume
() 1,
and substitute in the outer and inner solution in some overlapping region where both
solutions should hold. For this we choose
1
() and
2
() such that
1
()
()
2
() 1 where the outer solution is valid for that satises
1
() () 1
and the inner solution for that satises ()
2
(). Without loss of generality
we may assume > 0, so that
V
1
=
_
1 + 2
_
sin(z
i
+) 1
2 cos(z
i
+)
=
_
1 + 2
_ sin(z
i
0
) 1
2 cos(z
i
0
)
+ o(1),
and since / 1
V
1
=
1
cosh
2
(a
0
)
_
sin(2z
i
0
)
_
2
_
2
B
1
2
+
sin(2z
i
0
)
8a
2
0
_
cosh
_
2a
0
_
1
_
1
4a
0
_
B
1
+ sin(2z
i
0
)
_
sinh
_
2a
0
_
_
=
_
1 + 4
0
_
sin(z
i
0
) 1
2 cos(z
i
0
)
+ o(1),
provided
z
i
0
= 0, B
1
= 1 + 2
. (8.50)
With these restrictions
V
1
and
V
1
will attain a common limit for z z
i
= O(()). Thus
the matching condition xes the position of the boundary layer. If necessary, z
i
can be
determined up to higher-order accuracy by computing and matching the higher-order
inner and outer solutions. However, knowledge of z
i
0
is enough to determine V up to
rst-order accuracy.
Summarizing we nd that the outer solution
V and the inner solution
V are given
by
V(z) =
_
_
cos(z) +
_
1 + 2
_
sin(z) + 1
2 cos(z)
+ o(), < z
i
,
cos(z) +
_
1 + 2
_
sin(z) 1
2 cos(z)
+ o(), > z
i
,
(8.51)
and since a
0
= 1,
V(s) = tanh (s)
2
_
1 + 2
_
_
s
cosh
2
(s)
+ tanh(s)
_
. (8.52)
148 8.3 Solution near resonance
The composite solution can be found by adding both solutions and subtracting the com-
mon part. We nd
V(z) = sgn(z z
i
) [cos(z) 1] + tanh
_
z z
i
_
+
2
_
1 + 2
_
_
sin(z) sgn(z z
i
)
cos(z)
+ sgn(z z
i
)
(z z
i
)/
cosh
2
_
zz
i
_ tanh
_
z z
i
_
_
+ o(). (8.53)
As a result we obtain for 1
v() =
0
+
0
_
sgn ()
_
cos
_
2
_
1
_
+ tanh
_
2
__
(8.54)
+
0
+ 2
2
0
_
sin
_
2
_
sgn ()
cos
_
2
_ + sgn ()
2 cosh
2
_
2
_ tanh
_
2
_
_
+ ,
where we put z
i
= 0. Since tanh(x) approaches sgn(x) if x and cos(x) ap-
proaches 1 if x 0, we can rewrite the solution as
v() =
0
+
0
cos
_
2
_
tanh
_
2
_
+
0
+ 2
2
0
_
tan
_
2
_
tanh
_
2
_
cos
_
2
_
2 cosh
2
_
2
_
_
+ . (8.55)
Letting , , 0 this expression coincides with the one derived in equation (8.36)
using Mathieu functions.
Finally note that if we compute the average v, while omitting the odd parts of the
integrand, we nd to leading order
v =
1
2
_
v() d =
+ o(1), 1. (8.56)
We conclude that in exact resonance, when = 0, v will have zero average.
8.3.3 Steady-state solution for
= O(
1
)
Previously we assumed
= O(1) with . In this section we will investigate what hap-
pens when the dissipation by the stack is increased by assuming
= O(1). More
precisely we will dene
:= 2
=
2
0
. (8.57)
Nonlinear standing waves 149
With this rescaling, equation (8.32) transforms into
d
2
V
dz
2
+ 2V
dV
dz
V = sin(2z) +
. (8.58)
Again we will use the smallness of to nd an approximate solution via the method
of matched asymptotic expansions using an outer solution
V and an inner solution
V
that is valid inside a narrow region around some point z
i
(/2, /2). Remember
the boundary conditions are periodicity for the outer solution,
V(/2) = V(/2), (8.59)
and symmetry for the inner solution,
V(z
i
) = 0. (8.60)
Before we turn to the outer solution we will rst determine the inner solution. As
before we introduce
V by
V(z) =
V(s), s =
z z
i
.
Then
V satises
d
2
V
ds
2
+ 2
V
d
V
ds
V = sin(2z
i
+ 2s) +
2
, 1. (8.61)
We expand in powers of 1,
V(s) =
V
0
(s) +
V
1
(s) + ,
z
i
= z
i
0
+z
i
1
+ .
Next we substitute the expansions into (8.58) and equate the coefcients of
0
and
1
to
nd
d
2
V
0
ds
2
+ 2
V
0
d
V
0
ds
= 0, (8.62)
d
2
V
1
ds
2
+ 2
d
V
0
V
1
ds
V
0
= sin(2z
i
0
). (8.63)
Then we integrate (8.62) subject to
V(0) = 0. By separation of variables, we nd
V
0
= a
0
tanh [a
0
s] , (8.64)
where a
0
is yet to be determined. Without loss of generality we may assume a
0
0. It
still remains to determine
V
1
. We integrate (8.63) once with respect to s and apply the
integrating factor
exp
_
2
_
V
0
ds
_
= cosh
2
(a
0
s).
150 8.3 Solution near resonance
We can then rewrite (8.63) as
d
ds
_
cosh
2
(a
0
s)
V
1
_
=
_
sin(2z
i
0
)s + B
1
_
cosh
2
(a
0
s) +
log [cosh(a
0
z)] ,
where B
1
is a constant of integration. Integrating once again with respect to s, we get
V
1
=
1
cosh
2
(a
0
s)
_
sin(2z
i
0
)
s
2
4
B
1
s
2
+
sin(2z
i
0
)
8a
2
0
[cosh (2a
0
s) 1]
1
4a
0
_
B
1
+ sin(2z
i
0
)s
sinh (2a
0
s) +
L(s)
_
.
where
L(s) :=
_
s
0
log [cosh(a
0
)] d
=
1
2
s
2
s log 2 +
2
24
+
1
2
dilog(1 + e
2s
)
=
_
_
1
2
s
2
s log 2 +
2
24
+
1
2
n=1
(1)
n
e
2ns
n
2
s 0,
1
2
s
2
s log 2
2
24
1
2
n=1
(1)
n
e
2ns
n
2
s 0.
It follows that to avoid blow-up of the solution for large s we need to have sin(2z
i
0
) = 0,
i.e. z
i
0
= 0, and we obtain
V
1
=
1
cosh
2
(a
0
s)
_
B
1
s
2
B
1
4a
0
sinh (2a
0
s) +
L(s)
_
. (8.65)
The constants a
0
and B
1
will be determined from the matching condition between the
inner and outer solution. Taking the limits for s , we nd the following matching
conditions for
V:
lim
z0
V
0
= a
0
0, lim
z0
V
0
= a
0
0, (8.66)
lim
z0
V
1
=
B
1
2a
0
, lim
z0
V
1
=
B
1
2a
0
. (8.67)
Next we turn to the outer solution. Substituting the expansion
V =
V
0
+
V
1
+ , 1,
Nonlinear standing waves 151
into (8.58) and collecting the terms of order
0
and
1
, we nd
2
V
0
d
V
0
dz
V
0
= sin(2z), (8.68)
d
2
V
0
dz
2
+ 2
V
0
d
V
1
dz
+
_
2
d
V
0
dz
_
V
1
=
. (8.69)
The equation for
V
0
cannot be solved in closed form and will be solved numerically.
Therefore we will rst turn to
V
1
, which can be expressed in
V
0
. With the integrating
factor
exp
_
_
z
0
1
2
V
0
(s)
_
2
d
V
0
(s)
ds
_
ds
_
= E(z)
V
0
(z), E(z) = exp
_
_
z
0
2
V
0
(s)
ds
_
,
we can rewrite (8.69) as
dE
V
0
V
1
dz
=
E
2
_
d
2
V
0
dz
2
_
.
One more integration yields
V
1
(z) =
_
z
E(s)
2E(z)
V
0
(z)
_
d
2
V
0
(s)
ds
2
_
ds. (8.70)
Therefore once
V
0
is known we can apply (8.70) to determine
V
1
. However, before we
compute
V
0
numerically we will rst examine some properties of
V
0
.
We consider the nonlinear differential equation
2Y
dY
dz
Y = sin(2z), (8.71)
subject to either Y(/2) =, or Y(/2) = . Since 2Y
=
sin(2z)/Y it is clear that
if Y(z) = 0 for any z away from 0 then the solution will break down. This is shown in
gure 8.1 in which we plot Y for various or . For or too close to zero, the solution
may cross the the horizontal axis and break down. Theorem 1 below shows that, given
,= 0, Y can only cross zero in the right part of the domain and for given ,= 0 in the
left part of the domain.
Theorem 1
Suppose Y satises (8.71), then for any with 0 < < /2 it holds that
(i) if > 0, then Y(z) > 0 for all z (, /2];
(ii) if < 0, then Y(z) > 0 for all z [/2, );
(iii) if < 0, then Y(z) < 0 for all z (, /2];
(iv) if > 0, then Y(z) > 0 for all z [/2, ).
Proof.
152 8.3 Solution near resonance
(i) We will prove by contradiction. Suppose 0 < < /2, > 0 and z
0
[, /2)
such that Y(z
0
) = 0 and Y(z
0
) > 0 for all z [0, z
0
). Then Y
(z
0
) > 0. However,
from (8.71) we also nd
lim
zz
0
Y
(z) = lim
zz
0
2
sin(2z)
2Y(z)
= ,
and we arrive at a contradiction.
(ii-iv) The proof goes analogous to that of (i). 2
1.5 1 0.5 0 0.5 1 1.5
3
2
1
0
1
2
3
z
Y
= 3
= 2
= 1
= 0.1
= 0.1
= 1
(a)
1.5 1 0.5 0 0.5 1 1.5
3
2
1
0
1
2
3
z
Y
= 3
= 2
= 1
= 0.1
= 0.1
= 1
(b)
Figure 8.1: Y as a function of z for
= 1 and (a) Y(/2) = or (b) Y(/2) = . If
0 2.5 or 0 2.5, then the solution will break down when it crosses the horizontal
axis.
It now follows from Theorem 1 and the matching condition (8.66) that a necessary
condition for the inner and outer solutions to match is a change from a - solution
V
0
(with < 0) to a + solution
V
+
0
(with > 0). Moreover, Theorem 1 ensures that
such a negative solution always exists for z < 0 and such a positive solution for z > 0.
Since > 0 and < 0 it is clear that (8.59) can only be satised when 0 and 0,
although neither can be exactly equal to zero. Finally, there are still the two matching
conditions in (8.66) that need to be satised. If we take a
0
:=
V
+
0
(0), then the second of
the two matching conditions will be satised. Next, if we also choose = , then it
follows from Theorem 2 that
V
0
(0) =
V
+
0
(0) = a
0
and the rst condition in (8.66)
will be satised as well.
Theorem 2
Suppose Y satises (8.71) subject to Y(/2) = , then Y: z Y(z) satises (8.71)
with Y(/2) = .
Proof.
The statement follows immediately from substitution of Y into (8.71). 2
As an example of what V
0
looks like we have plot in gure 8.2 the composite solution
that is obtained by combining the leading order inner and outer solutions. The plots
have been computed for various values of and
, = 10
5
and = 0. We observe
Nonlinear standing waves 153
that as the dissipation in the stack is increased and
gets bigger, the shock wave gets
less steep, until it completely disappears for
1. Similarly, when increases, the
viscous effects in the tube become more dominant, and the shock wave becomes less
steep.
1.5 1 0.5 0 0.5 1 1.5
0.75
0.5
0.25
0
0.25
0.5
0.75
z
V
0
= 0.01
= 0.05
= 0.1
= 0.2
(a)
1.5 1 0.5 0 0.5 1 1.5
1
0.5
0
0.5
1
z
V
0
= 0
= 1
= 2
= 5
(b)
Figure 8.2: V
0
as a function of z for = 10
5
and = 0. In (a) is varied for
= 1 and in
(b)
is varied for = 0.05.
Once
V
0
and
V
+
0
have been computed, we can use (8.70) to compute
V
+
1
(z) =
_
/2
z
E
+
(s)
2E
+
(z)
V
+
0
(z)
_
d
2
V
+
0
(s)
ds
2
_
ds + C
1
, (8.72)
1
(z) =
_
z
/2
E
(s)
2E
(z)
V
0
(z)
_
d
2
0
(s)
ds
2
_
ds + C
1
, (8.73)
where we imposed
V
+
1
(/2) =
V
1
(/2). Substituting
V
0
(z) =
V
+
0
(z), we can
write
1
(z) = V
+
1
(z)
_
z
/2
E
(s)
E
(z)
V
0
(z)
ds + C
1
. (8.74)
Furthermore the two matching conditions in (8.67) can be reduced to one condition if
we impose
V
1
(0) =
V
+
1
(0). This leads to the following expression for C
1
:
C
1
=
_
0
/2
E
(s)
E
(0)
V
0
(0)
ds =
_
/2
0
E
+
(s)
E
+
(0)
V
+
0
(0)
ds.
Substituting C
1
back into (8.72) and (8.74) we nd
V
+
1
(z) =
_
/2
z
E
+
(s)
2E
+
(z)
V
+
0
(z)
_
d
2
V
+
0
(s)
ds
2
_
ds
_
/2
0
E
+
(s)
E
+
(0)
V
+
0
(0)
ds, (8.75)
1
(z) = V
+
1
(z) +
_
z
/2
E
(s)
E
(z)
V
0
(z)
ds +
_
0
/2
E
(s)
E
(0)
V
0
(0)
ds. (8.76)
154 8.4 Results
Lastly we determine B
1
from the remaining matching condition in (8.67). We nd
B
1
= 2a
0
lim
z0
V
+
1
(z)
=
_
/2
0
E
+
(s)
_
d
2
V
+
0
(s)
ds
2
+
_
ds,
where we used a
0
=
V
+
0
(0) and E
+
(0) = 1.
The full composite solution is now found by adding the inner and outer solutions
and subtracting the common part.
V(z) =
_
0
(z) +
V
0
_
z
_
+ a
0
+
_
V
1
(z) +
V
1
_
z
B
1
2a
0
_
z 0.
V
+
0
(z) +
V
+
0
_
z
_
a
0
+
_
V
+
1
(z) +
V
+
1
_
z
_
+
B
1
2a
0
_
z 0.
Note that since V
0
(z) = V
0
(z), it follows that V = 0 + O(), so that to leading
order V has zero average. If in addition
= 0, then it follows from (8.74) that even
V = 0 +O(
2
).
Figure 8.3 below shows the V
1
proles for various and
. For the calculations
we used the V
0
proles shown in gure 8.2 . Special precaution has to be taken near
z = /2 where there is a removable singularity similar to what we observed in the
previous section in (8.49) ; the numerical integration converges if z = /2 is excluded.
1.5 1 0.5 0 0.5 1 1.5
2
1
0
1
2
z
V
1
= 0.01
= 0.05
= 0.1
= 0.2
(a)
1.5 1 0.5 0 0.5 1 1.5
6
4
2
0
2
4
6
z
V
1
= 0
= 0.5
= 1
= 1.5
(b)
Figure 8.3: V
1
as a function of z for = 10
5
and = 0. In (a) is varied for
= 1 and in
(b)
is varied for = 0.05.
8.4 Results
We have tested the equations derived in the previous sections for two kinds of congu-
rations:
Nonlinear standing waves 155
(a) A closed tube excited near resonance by a speaker generating velocity oscillations
at a relative amplitude 1 with h(t) = sin(t) (gure 8.4(a)). This conguration
can be used to model a thermoacoustic prime mover, with the speaker simulating
the presence of the sound-producing stack.
(b) A thermoacoustic refrigerator, consisting of a closed tube with a stack of parallel
plates positioned near the closed end. The speaker provides sound at a relative
amplitude 1 with h(t) = sin(t) (gure 8.4(b)).
L
sound
(a) Closed tube
sound
L
A
L
B
L
C
L
(b) Closed tube with thermoacoustic stack
Figure 8.4: We consider two kinds of congurations: (a) a closed tube driven near resonance
and (b) a thermoacoustic refrigerator driven near resonance with a stack near the closed end.
8.4.1 Nonlinear standing waves in a closed tube
We have simulated a closed tube at exact resonance with the parameters as given in
Table 8.1. For this conguration we can compare the results of the matched asymptotics
in Section 8.3.2 for = 0 with the solution computed in Section 8.3.1 using Mathieu
functions.
First in gure 8.5 we give the nonlinear pressure and velocity proles as a function
of both time and the position in the tube. Then in gure 8.6 we show how the nonlin-
earity travels inside the tube at given times and we compare the result of the matched
asymptotics (solid line) with the zero-viscosity solution (dashed line) given in (8.36).
From gures 8.5 and 8.6 we conclude that as time changes the nonlinearity moves
back and forth through the tube and enters and leaves the tube at the piston (x = L).
Note that the pressure is an odd function of time and velocity is an even function of time.
The zero-viscosity solution shows a discontinuous shock-like prole. We expect that as
decreases the matched asymptotics will converge to the same shock prole. Indeed it
follows from gure 8.7 that as decreases and the effect of viscosity becomes smaller
the prole will look more and more like the zero-viscosity shock wave. Note also that
although the sound waves were excited with a Mach number of only 6 10
6
, we
nd peak Mach numbers close to 6 10
3
.
156 8.4 Results
(a) velocity (b) pressure
Figure 8.5: (a) The velocity u and (b) the pressure p as a function of place and time in the closed
tube. The proles were computed at exact resonance using the parameter values from Table 8.1.
0 0.2 0.4 0.6 0.8 1
400
300
200
100
0
100
200
300
400
x/L
p
(
P
a
)
0 0.2 0.4 0.6 0.8 1
1.5
1
0.5
0
0.5
1
1.5
x/L
u
(
m
/
s
)
t = 0
t = /4
t = /2
t = 3/4
t =
(a)
0 0.2 0.4 0.6 0.8 1
1.5
1
0.5
0
0.5
1
1.5
u
(
m
/
s
)
x/L
0 0.2 0.4 0.6 0.8 1
400
300
200
100
0
100
200
300
400
x/L
p
(
P
a
)
t = 0
t = /4
t = /2
t = 3/4
t =
(b)
Figure 8.6: The velocity and pressure inside the closed tube at various times. The computations
were performed at exact resonance ( = 0), and there is a good agreement between the matched
asymptotics (-) and the zero-viscosity solution (- -).
Nonlinear standing waves 157
Physical parameters Dimensionless parameters
symbol value unit symbol value
U 2.1 10
3
m s
1
c
0
330 m s
1
0
L 0.5 m 0
f 330 - 4.4 10
2
b 1 10
2
kg m
1
s
2
1.4
0
1 kg m
3
6.3 10
6
1 10
6
m 0
Table 8.1: Parameter values for simulation of closed tube.
0
1
0.5
0
0.5
1
t
u
(
m
/
s
)
= 0.1,
= 0.05
= 0.01
/2 - -/2
(a)
0
200
100
0
100
200
t
p
(
P
a
)
= 0.1,
= 0.05
= 0.01
/2 - -/2
(b)
Figure 8.7: (a) The velocity u and (b) the pressure p as a function of time in the center of the
tube. As we vary from 0.1 to 0.01 (and viscosity decreases) we see that the nonlinear wave
prole starts to look more and more like a shock wave.
8.4.2 Nonlinear standing waves in a thermoacoustic refrigerator
In this section we will simulate a thermoacoustic refrigerator of the type shown in gure
8.4(b). In particular we will simulate the thermoacoustic couple of Atchley et al. [11] that
was described in Section 6.3. In addition to the stack specications given in Table 6.1,
we will use the parameter values given in Table 8.2 to describe segments A and C. The
value of
C
depends on the frequency f and the length of the third segment L
C
and is
chosen such that
C
=
L
C
(1 +
C
)
c
0
= 0,
and a nonlinearity will arise in the right part of the tube. In the left part of the tube we
have
A
= 0 and
A
=
L
A
c
0
,= 0.
We have implemented this conguration in three steps:
158 8.4 Results
Physical parameters Dimensionless parameters
symbol value unit symbol value symbol value
U 4.37 10
3
m s
1
A
0.215
C
c
0
1.02 10
3
m s
1
A
-2.93
C
0
L
A
5 cm
A
0
C
5e-3
L
B
6.85 cm
A
0
C
8.44 10
2
L
C
73.1 cm 1.67
C
1.58 10
3
1e-6 m
C
4 10
4
f 696 Hz
b 2.87 10
4
kg m
1
s
2
0
0.184 kg m
3
Table 8.2: Parameter values for thermoacoustic refrigerator.
1. First we simulate the segment C, between the stack and the speaker. At x = 0
we impose a reection coefcient by xing and at x = L
C
we assume harmonic
excitation with h(t) = sin(t). Implementing the equations given in Section 8.3.3
we can compute the pressure p
C
and the velocity u
C
.
2. We then compute the discrete Fourier transform of p
C
and u
C
at x = 0 and use it
as a boundary condition for the sound eld in the stack by applying continuity of
mass and momentum for each mode. For each mode the pressure, velocity, and
temperature proles are computed by implementing the system of odes given in
(4.70). Finally the full nonlinear sound eld in the stack is computed using the
inverse of the discrete Fourier transform.
3. Segment A is not at resonance and thus we can compute the sound eld by imple-
menting the off-resonance solution given in Section 8.3.1. The nonlinearity comes
in via the right velocity condition which follows from the nonlinear velocity eld
in the stack by continuity of mass across the interface.
In gure 8.8 we give the nonlinear pressure and velocity proles as a function of both
time and the position for a reection coefcient R
0
= 0.995 (
1.67). Then in g-
ure 8.9 we show how the nonlinearity travels inside the thermoacoustic refrigerator at
given times. As for the closed tube without stack we conclude that as time changes
the nonlinearity moves back and forth through the tube. Inside the stack the nonlinear-
ity is damped due to dissipation in the narrow pores. Moreover, it follows from from
gure 8.10 that as
is increased (and R
0
becomes smaller), the sharp nonlinearity is
smoothened, and the velocity and pressure proles change from the nonlinear shock
waves into a more familiar linear sinusoid prole.
Nonlinear standing waves 159
(a) velocity in stack (b) velocity in tube
(c) pressure in stack (d) pressure in tube
Figure 8.8: The velocity u and pressure p as a function of place and time in (a,c) the stack and
(b,d) the tube. The computations were performed at resonance with a reection coefcient of
R = 0.995 and at a frequency of 696 Hz.
160 8.4 Results
0 0.2 0.4 0.6 0.8
2
1
0
1
2
x 10
3
x(m)
A
g
u
(
m
3
/
s
)
(a) volumetric velocity
t = 0
t = /4
t = /2
t = 3/4
t =
0 0.2 0.4 0.6 0.8
300
200
100
0
100
200
300
x(m)
p
(
P
a
)
(b) pressure
0 0.2 0.4 0.6 0.8
2
1
0
1
2
x 10
3
x(m)
A
g
u
(
m
3
/
s
)
(c) volumetric velocity
t = 0
t = /4
t = /2
t = 3/4
t =
0 0.2 0.4 0.6 0.8
300
200
100
0
100
200
300
x(m)
p
(
P
a
)
(d) pressure
Figure 8.9: The velocity and pressure as a function of the position in the refrigerator at various
times.
0
3
2.5
2
1.5
1
0.5
0
0.5
t
u
(
m
/
s
)
/2 - -/2
= 0
= 1
= 2
(a) velocity
0
600
400
200
0
200
400
600
t
p
(
P
a
)
/2 - -/2
= 0
= 1
= 2
(b) pressure
Figure 8.10: (a) The velocity u and (b) the pressure p as a function of time at the right stack
end. As we vary
from 0 to 2 the nonlinearity is smoothened.
Chapter 9
Conclusions and discussion
A weakly non-linear theory of thermoacoustics for arbitrary and slowly varying pore
cross-sections, applicable for stacks, regenerators, and resonators, has been developed
based on systematic dimensional analysis and using small-parameter asymptotics. Cru-
cial assumptions for the asymptotic expansions are small amplitudes (D
r
, M
a
1) and
slow longitudinal variation ( 1). The theory is weakly non-linear in the sense that al-
though the equations are linearized, terms up to second order in M
a
and are included;
in addition to the rst and second harmonics this also includes streaming, second-order
time-averaged mass ow.
Using the smallness of it is possible to decouple the transverse and longitudinal
variation of the uid variables. It follows that a coupled system of ordinary differential
equations has to be solved for the mean temperature, the acoustic pressure, and the av-
erage acoustic velocity, which can easily be implemented numerically. The problem of
determining the transverse velocity variation is reduced to nding Greens functions for
a modied Helmholtz equation on the given cross-section and solving two additional
integral equations. Next the streaming velocity can be determined using a Greens func-
tion for the Poisson equation. Finally it is shown that the second-harmonic pressure and
velocity can also be determined from a system of ordinary differential equations simi-
lar to the one found for the rst harmonics. The asymptotic theory can in principle be
extended to include higher-order terms, such as the higher harmonics and higher-order
streaming, but this is avoided as it would require a lengthy and messy derivation and
would add little more understanding.
In addition to M
a
and we have identied several other dimensionless parame-
ters (S
k
, , N
L
, B
r
) that are crucial in thermoacoustics. For these parameters we have
indicated various parameter regimes, each signifying specic geometrical or physical
constraints. For specic parameter regimes an approximate analytic solution can be ob-
tained. For example, at constant temperature the acoustic velocity and pressure in a
straight tube can be written as a linear combination of sines and cosines with a complex
wave number; for linearly changing cross-sections this becomes a combination of Bessel
functions of the rst and second kind. The wave number will have a small imaginary
part to account for viscous dissipation, depending on the width of the tube. Another
approach predicts the steady-state temperature difference across the stack using a short-
stack approximation ( 1), which shows a change from a sinusoid prole for small
162
Prime Mover
Heat Pump
Resonator
Figure 9.1: Combination of traveling-wave heat pump and prime mover using a double-
Helmholtz resonator. The regenerators are located near velocity nodes of the tube to reduces
viscous dissipation and the gas loop surrounding the regenerator gives the traveling-wave phas-
ing. The sound produced by the prime mover is used to drive the refrigerator.
amplitudes to a sawtooth prole for large amplitudes. A third approximation assumes
wide tubes (N
L
1) and large temperature differences. It turns out that a tube that
satises these conditions will have a temperature prole that changes from a linear pro-
le in the absence of streaming to an exponential prole when the average mass ux is
increased.
The thermoacoustic equations have been applied to two kinds of thermoacoustic
systems: standing-wave (straight-tube) devices and traveling-wave (looped-tube) de-
vices. The standing-wave devices are modeled as (closed) straight tubes with a stack
and heat exchangers placed inside and, in case of a refrigerator, driven by a speaker. To
validate our equations a numerical simulation of a thermoacoustic couple has been per-
formed and compared to experimental and analytic results with very good agreement.
Subsequently it has been shown numerically how a standing-wave prime mover and
refrigerator perform under various operating conditions. In particular we have investi-
gated how parameters like drive ratio, temperature difference, mass ux, stack length,
stack position, hydraulic radius, porosity, plate material, mean pressure, power-input,
and power-output affect the relative coefcient of performance and efciency.
A traveling-wave prime mover has been modeled as a resonance tube with variable
acoustic load connected to a short looped tube containing a regenerator and thermal
buffer tube. The resonator is there to create the optimal phasing between pressure and
velocity at the location of the loop. In addition the loop has a contraction and expansion
to create the proper phasing at the regenerator. In our numerical simulations we xed
the regenerator and thermal buffer tube and performed an optimization routine that
determines a loop and resonator conguration that gives a stable system for given sys-
tem parameters such as drive ratio, regenerator impedance, temperature difference, and
frequency. This optimization routine can be a very useful tool in the design of practi-
cal traveling-wave systems. In addition we have optimized several of the regenerators
properties, such as impedance, drive ratio, temperature difference, regenerator length,
porosity, hydraulic radius, mass ux, and regenerator material, to maximize the regen-
erator efciency. A comparison with an equivalent standing-wave prime mover shows
that the traveling-wave prime mover can potentially yield efciencies that are twice as
high.
The logical next step in the analysis of traveling-wave devices would combine the
traveling-wave prime mover with a traveling-wave refrigerator. One could for example
remove the acoustic load and attach a looped refrigerator in its place, a so-called ther-
moacoustically driven refrigerator (cf. [77]). Another possible approach uses a double-
Conclusions and discussion 163
Helmholtz resonator (gure 9.1), i.e. a closed resonator tube that expands towards the
tube ends, with regenerators placed near both ends. If sufcient heat is supplied to
one of the regenerators it is possible to produce enough sound to generate a signicant
temperature difference across the other regenerator (cf. [78]). A third conguration, as
proposed by Yazaki et al. [154], assumes the looped geometry given in gure 9.2, where
the rst regenerator generates spontaneous gas oscillations which are absorbed by the
secondary regenerator that is placed further along the loop. This is a much simpler
geometry which ensures the gas in the regenerator to execute the ideal Stirling cycle.
However, large velocities may occur near the regenerators, causing large viscous losses
and degrading the performance. The rst two approaches are therefore recommended.
Refrigerator
Prime mover
Figure 9.2: Looped tube equipped with prime mover and refrigerator. If enough heat is supplied
to the rst regenerator, then spontaneous gas oscillations will arise around the loop, generating
a temperature difference across the secondary regenerator.
Lastly, we have investigated the nonlinear disturbances that can arise in a thermoa-
coustic refrigerator or prime mover, when it is excited near resonance. It is shown
that nonlinear shock-like proles may arise, due to a balance of energy inow from
the source with nonlinear absorption and viscous dissipation in the gas and stack. The
presence of a stack in a closed tube is modeled by means of a reection condition, as
a result of which we can compute the nonlinear wave proles both in the stack in the
tube.
164
Appendix A
Thermodynamic constants and
relations
In dimensional form we have the following thermodynamic constants and relations
(taken from [25]).
c
2
=
_
p
_
s
, (A.1)
C
p
= T
_
s
T
_
p
=
_
h
T
_
p
, (A.2)
C
v
= T
_
s
T
_
=
_
T
_
, (A.3)
=
1
T
_
p
, (A.4)
c
2
2
T = C
p
( 1), (A.5)
p = h , (A.6)
ds =
C
p
T
dT
dp, s
1
=
C
p
T
0
T
1
0
p
1
, (A.7)
d =
c
2
dp dT,
1
=
c
2
p
1
0
T
1
, (A.8)
dh = Tds +
1
dp, h
1
= T
0
s
1
+
p
1
0
, (A.9)
d = Tds +
p
2
d,
1
= T
0
s
1
p
0
2
0
1
. (A.10)
166
Appendix B
Derivations
B.1 Total-energy equation
From the conservation of mass (3.1), momentum (3.2), and energy (3.3), we can derive
the following expressions
t
= (v) , (B.1)
v
t
= (v )v p + +b, (B.2)
t
= (v ) + (KT) p v +:v. (B.3)
We can use these relations to derive an equation for the change in total energy per unit
mass
1
2
[v[
2
+,
t
_
1
2
[v[
2
+
_
=
t
_
1
2
[v[
2
+
_
+v
v
t
+
t
=
1
2
[v[
2
(v) v (v )v (v) v +v b
v p p v + v ( ) +:v + (KT) . (B.4)
Since
(v ) = v ( ) +:v, (B.5)
we can write
t
_
1
2
[v[
2
+
_
=
_
1
2
[v[
2
v +v + pv KT v
_
+v b,
=
_
v
_
1
2
[v[
2
+ h
_
KT v
_
+v b, (B.6)
where we used that h = + p/. The same equation appears in [71], but without the
gravitational term. It describes the rate of change of the total specic energy of the uid
168 B.2 Temperature equation
due to an energy ux arising from four phenomena: transfer of mass by the motion of
the uid, transfer of heat, internal friction, and gravitational effects.
B.2 Temperature equation
Starting from equation (3.3), we can derive an equation for the uid temperature T.
After substitution of (3.5) and = h p/, we obtain
dh
dt
=
d
dt
_
p
_
+ (KT) p v +:v
=
dp
dt
+ (KT)
p
d
dt
p v +:v
=
dp
dt
+ (KT) +:v, (B.7)
where we substituted the continuity equation (3.1) into the last equality. It follows from
the thermodynamic relations (A.9) and (A.7) that the total derivative of h can be written
as follows:
dh
dt
= T
ds
dt
+
dp
dt
= C
p
dT
dt
+ (1 T)
dp
dt
. (B.8)
If we substitute this back into (B.7), then we nd
C
p
dT
dt
= T
dp
dt
+ (KT) +:v. (B.9)
Appendix C
Greens functions
In this section we will rst show how the F
j
-functions given in Section 5.1 and the F
j,2
-
functions given in Section 5.5 can be computed using Greens functions [38]. Then we
will show how the Greens functions can be computed for specic geometries.
C.1 F
j
-functions
First we introduce the Greens functions G
and G
k
. For every X we x x
/
g
(X), set
x := Xe
x
+ x
, and solve for j = , k
G
j
(x; x)
1
2
j
G
j
(x; x) = (x
), x
/
g
(X), (C.1a)
G
j
(x; x) = 0, o
g
(x) = 0. (C.1b)
Using the Greens identities, the F
j
-functions introduced in (5.4) can be expressed in G
j
as follows:
F
j
(x) =
_
/
g
G
j
(x; x) d
S, j = , k. (C.2)
In the same way we can also introduce the Greens functions G
s
. For xed x
/
s
(X)
we solve
G
s
(x; x)
1
2
s
G
s
(x; x) = (x
), x
/
s
(X), (C.3a)
G
s
(x; x) = 0, o
g
(x) = 0, (C.3b)
G
s
(x; x) n
= 0, o
t
(x) = 0. (C.3c)
170 C.1 F
j
-functions
Given g
j
it can be shown that
F
k j
(x) =
_
/
g
G
k
(x; x) d
S
_
g
g
j
( x)
G
k
(x; x) n
,
F
s j
(x) =
_
/
s
G
s
(x; x) d
S +
_
g
(1 g
j
( x))
G
s
(x; x) n
.
The hats in the gradients and integrals are used to indicate that the differentiation or
integration is with respect to x. It only remains to determine the unknown boundary
functions g
u
and g
p
for which we will use the boundary condition (3.23c). If we impose
F
kp
n
F
sp
n
, o
g
= 0,
(F
ku
P
r
F
) n
F
su
n
, o
g
= 0,
then (3.23c) is satised to leading order. We now nd that g
u
and g
p
are found from the
following integral equations:
_
g
K
b
(x; x)g
j
( x) d
=
j
(x), o
g
(x) = 0, j = u, p, (C.4)
where
u
,
p
and K
b
are dened as
p
(x) =
_
/
g
G
k
(x; x) n
d
S,
u
(x) =
_
/
g
(G
k
(x; x) P
r
G
(x; x)) n
d
S,
K
b
(x; x) =
_
G
k
(x; x) G
s
(x; x)
_
n
_
n
.
In most cases these integral equations are not trivially solved. In [5] this problem
was avoided by neglecting the acoustic uctuations in the wall, i.e. g
u
= g
p
= 0. In
that case F
su
= F
sp
= 1 and F
kp
= F
ku
= F
k
. The second case for which the solution is
simple is when /
g
is rotationally symmetric, i.e. circular or conical pores. Then K
b
and
the g
j
-functions will be constant on
g
(X) and we nd
g
j
=
j
K
b
, j = u, p. (C.5)
These two cases are discussed in more detail in Sections 5.3.1 and 5.3.2. For the general
case one has to resort to a numerical implementation or to the general theory of integral
equations. For example a solution can be attempted in the form of a sum of orthogonal
basis functions.
Greens functions 171
C.2 F
j,2
-functions
The F
j,2
-functions can be determined in the same way as the F
j
-functions. We rst de-
termine Greens functions G
j,2
(, k) from
G
j,2
(x; x)
1
2
j,2
G
j,2
(x; x) = (x
), x
/
g
(X), (C.6a)
G
j,2
(x; x) = 0, o
g
(x) = 0, (C.6b)
and G
s,2
from
G
s,2
(x; x)
1
2
s,2
G
s,2
(x; x) = (x
), x
/
s
(X), (C.7a)
G
s,2
(x; x) = 0, o
g
(x) = 0, (C.7b)
G
s,2
(x; x) n
= 0, o
t
(x) = 0. (C.7c)
It follows that the
j,2
-functions as introduced in (5.48) are given by
_
j,2
( f )
_
(x) =
_
/
g
f (x)G
j,2
(x; x) d
S, j = , k. (C.8)
In particular F
j,2
follows from
j,2
by substitution of f 1,
F
j,2
(x) =
_
/
g
G
j,2
(x; x) d
S, j = , k. (C.9)
Furthermore F
k j,2
(k = u, p) is given by
F
k j,2
(x) =
_
/
g
G
k,2
(x; x) d
S
_
g
g
j,2
( x)
G
k,2
(x; x) n
,
F
s j,2
(x) =
_
/
s
G
s,2
(x; x) d
S +
_
g
(1 g
j,2
( x))
G
s,2
(x; x) n
,
where the boundary functions g
u,2
and g
p,2
are found from the following integral equa-
tions:
_
g
K
b,2
(x; x)g
j,2
( x) d
=
j,2
(x), o
g
(x) = 0, j = u, p, (C.10)
where
u,2
,
p,2
and K are dened as
p,2
(x) =
_
/
g
G
k,2
(x; x) n
d
S,
u,2
(x) =
_
/
g
_
G
k,2
(x; x) P
r
G
,2
(x; x)
_
n
d
S,
K
b,2
(x; x) =
_
G
k,2
(x; x) G
s,2
(x; x)
_
n
_
n
.
172 C.3 Greens functions for various stack geometries
n Laplace:
2
Modied Helmholtz:
2
1/
2
j
1
1
2
[x
[
1
2
j
exp
_
j
[x
[
_
2
1
2
log [x
[
1
2
K
0
(
j
[x
[)
Table C.1: Free-space Greens functions on R
n
.
As above we note that if we assume a steady wall temperature then g
u,2
= g
p,2
= 0, so
that F
su
= F
sp
= 1 and F
kp
= F
ku
= F
k
. Moreover, for rotationally symmetric pores we
nd that K
b,2
and the g
j,2
-functions will be constant on
g
(X), so that
g
j,2
=
j,2
K
b,2
, j = u, p. (C.11)
C.3 Greens functions for various stack geometries
There is more than one way to determine the Greens functions G
j
. One way is using
the method of images [38]. The method of images adds homogeneous solutions to the
free-space Greens function in such a way that their sum satises the right boundary
conditions. The free-space Greens functions are given in Table C.1 and are fundamental
solutions of the Laplace and modied Helmholtz equations that have suitable behavior
at innity.
As an example we consider the case n = 1 where we have a geometry as shown in
Fig. C.1(a), so that x
= y. Dene
j
(x, x) :=
1
2
j
exp
_
j
[y y[
_
, j = , k, s.
We now want to add a homogeneous function such that the resulting function vanishes
at
g
. Introducing sources at the reection points 21
s
y and 21
s
y, we can cancel
the contribution of y on
g
. However, to eliminate the contributions of 21
s
y and
21
s
y we have to introduce even more sources. Continuing this way we can write
the Greens functions G
j
( j = , k) in the form of an innite sum,
G
j
(x, x) =
k=
_
j
[x; a
k
]
j
[x; b
k
]
_
, j = m, , k, (C.12)
where
a
k
= (X, y + 4k1
s
), b
k
= (X, y + (4k 2)1
s
).
Similarly we can show that in the solid G
s
is given by the sum
G
s
(x, x) =
k=
(1)
k
_
s
[x; a
sk
]
s
[x; b
sk
]
_
, (C.13)
Greens functions 173
21
s
21
t
y
(a) Parallel plates
r
1
s
1
t
(b) Circular cross-sections
y
z
2b
t
2a
t
2b
g
2a
g
(c) Rectangular cross-sections
Figure C.1: Various stack geometries.
where
a
sk
= (X, y + 2k(1
t
1
s
)), b
sk
= (X, y + 2k(1
t
1
s
) + 21
s
).
For n = 2 we will employ a different approach that is also used by [38] and that
solves for the Greens functions by expanding in eigenfunctions. For circular pores this
leads to the following expressions:
G
m
(x; x) =
1
1
2
s
n=
i=1
J
n
(k
ni
r)J
n
(k
ni
r)
k
2
ni
J
2
n
(k
ni
1
s
)
cos
_
n(
)
, (C.14)
G
j
(x; x) =
1
1
2
s
n=
i=1
2
j
J
n
(k
ni
r)J
n
(k
ni
r)
(k
2
ni
2
j
)J
2
n
(k
ni
1
s
)
cos
_
n(
)
, j = k, , (C.15)
G
s
(x; x) =
2
n=
i=1
2
j
ni
(l
ni
r)
ni
(l
ni
r) cos[n(
)]
n
(k
2
ni
2
j
)[1
2
t
2
ni
(l
ni
1
t
) 1
2
s
2
ni
(l
ni
1
s
)]
, (C.16)
where the prime denotes differentiation and
ni
(r) = Y
n
(l
ni
1
s
)J
n
(r) J
n
(l
ni
1
s
)Y
n
(r),
n
=
_
2, n = 0,
1, n > 0,
and J
n
and Y
n
are the Bessel functions of the rst and second kind, respectively. Fur-
thermore, the eigenvalues k
ni
and l
ni
are computed from
J
n
(k
ni
1
s
) = 0,
d
n
dr
(l
ni
1
t
) = 0.
174 C.3 Greens functions for various stack geometries
1
0.5
0
0.5
1
1
0
1
0.2
0.15
0.1
0.05
0
y
z
(a) Re
_
G
j
_
1
0
1
1
0
1
0.5
0
0.5
1
y
z
(b) Im
_
G
j
_
Figure C.2: The Greens function G
j
for the Helmholtz equation over a rectangular region with
Dirichlet boundary conditions on the sides when a
g
= b
g
= 1,
j
= 1 + i, and y = z = 0.3.
For rectangular pores we obtain the following Greens functions:
G
m
=
4
a
g
b
g
i,n=1
g
in
i
2
2
/a
2
g
+ n
2
2
/b
2
g
, (C.17)
G
j
=
4
a
g
b
g
i,n=1
2
j
g
in
i
2
2
/a
2
g
+ n
2
2
/b
2
g
4
2
j
, j = k, , (C.18)
G
s
=
4
(a
s
)(b
s
)
i,n odd
2
s
s
in
i
2
2
/(a
s
)
2
+ n
2
2
/(b
s
)
2
4
2
s
, (C.19)
with eigenfunctions
g
in
(x; x) = sin
_
i
y + a
g
2a
g
_
sin
_
i
y + a
g
2a
g
_
sin
_
n
z + b
g
2b
g
_
sin
_
n
z + b
g
2b
g
_
,
s
in
(x; x) = sin
_
i
2
y a
g
a
s
_
sin
_
i
2
y a
g
a
s
_
sin
_
n
2
z b
g
b
s
_
sin
_
n
2
z b
g
b
s
_
,
where a
s
= a
t
a
g
and b
s
= b
t
b
g
. As an example of how such a Greens function may
look, we have plotted G
j
in Fig. C.2 as a function of y and z on the unit square.
Bibliography
[1] S.I. Aanonsen, T. Barkve, J.N. Tjtta, and S. Tjtta, Distortion and harmonic genera-
tion in the neareld of a nite amplitude sound beam, Journal of Acoustical Society of
America (1984), 749768.
[2] P.C.H. Aben, P.R. Bloemen, and J.C.H. Zeegers, 2-D PIV measurements of oscillatory
ow around parallel plates, Experiments in Fluids (2008).
[3] M. Abramowitz and I.A. Stegun, Handbook of mathematical functions, National Bu-
reau of Standards, Washington D.C., 1964,
http://www.math.sfu.ca/
cbm/aands/.
[4] S.B. Araujo, Downhole electric power generation by aeroacoustic oscillations, Univer-
siteitsdrukkerij Eindhoven, Eindhoven, 2004.
[5] W. P. Arnott, H.E. Bass, and R. Raspet, General formulation of thermoacoustics for
stacks having arbitrarily shaped pore cross sections, Journal of Acoustical Society of
America 90 (1991), 32283237.
[6] A.A. Atchley, Standing wave analysis of a thermoacoustic prime mover below onset of
self-oscillation, Journal of Acoustical Society of America 92 (1992), 29072914.
[7] , Study of a thermoacoustic prime mover below onset of self-oscillation, Journal
of Acoustical Society of America 91 (1992), 734743.
[8] , Analysis of a thermoacoustics prime mover above onset of self-oscillation, Jour-
nal of Acoustical Society of America 94 (1993), 1773.
[9] , Analysis of the initial buildup of oscillations in a thermoacoustic prime mover,
Journal of Acoustical Society of America 95 (1994), 16611664.
[10] A.A. Atchley, H.E. Bass, and T. Hoer, Frontiers of nonlinear acoustics, ch. Develop-
ment of nonlinear waves in a thermoacoustic prime mover, pp. 603608, Elsevier
Science Publishers, London, 1990.
[11] A.A. Atchley, T. Hoer, M.L. Muzzerall, M.D. Kite, and Chianing Ao, Acousti-
cally generated temperature gradients in short plates, Journal of Acoustical Society of
America 88 (1990), 251.
[12] J.L. Auriault, Heterogeneous medium. is an equivalent macroscopic description possible?,
International Journal of Engineering Science 29 (1983), 785795.
176 Bibliography
[13] , Upscaling heterogeneous media by asymptotic expansions, Journal of Engi-
neering Mechanics 128 (2002), 817822.
[14] S. Backhaus and G.W. Swift, A thermoacoustic stirling heat engine: Detailed study,
Journal of Acoustical Society of America 107 (2000), 31483166.
[15] , New varieties of thermoacoustic engines, Proceedings of the
Ninth International Congress on Sound and Vibration (2002),
www.lanl.gov/thermoacoustics/Pubs/ICSV9.pdf.
[16] S. Backhaus, E. Tward, and M. Petach, Traveling-wave thermoacoustic electric gener-
ator, Applied Physics Letters 85 (2004), 10851088.
[17] H. Bailliet, V. Gusev, R. Raspet, and R.A. Hiller, Acoustic streaming in closed ther-
moacoustic devices, Journal of Acoustical Society of America 110 (2001), 18081821.
[18] M.J.A. Baks, A. Hirschberg, B.J. van der Ceelen, and H.M. Gijsman, Experimen-
tal verication of an analytical model for orice pulse tube refrigeration, Cryogenics 30
(1990), 947951.
[19] W.E. Boyce and R.C. DiPrima, Elementary differential equations and boundary value
problems, Wiley Interscience, New York, 1965.
[20] E. Buckingham, On physically similar systems: Illustrations of the use of dimensional
equations, Physical Review (1914), 345376.
[21] H.B. Callen, Thermodynamics, ch. Appendix F, Wiley, New York, 1960.
[22] R.L. Carter, M. White, and A.M. Steele, Private communication of Atomics Interna-
tional Division of North American Aviation, Inc., (1962).
[23] P.H. Ceperley, A pistonless stirling engine - the traveling wave heat engine, Journal of
Acoustical Society of America 66 (1979), 1508.
[24] , Gain and efciency of a short traveling wave heat engine, Journal of Acoustical
Society of America 77 (1985), 12391244.
[25] C.J. Chapman, High speed ow, University Press, Cambridge, 2000.
[26] S. Chapman and T.G. Cowling, The mathematical theory of non-uniform gases; an
account of the kinetic hteory of viscosity, thermal conduction, and diffusion in gases,
Cambridge University Press, Cambridge, 1939.
[27] R. Chen and S.L. Garrett, A large solar/heat-driven thermoacoustic cooler, Journal of
Acoustical Society of America 108 (2000), 2554.
[28] W. Chester, Resonant oscillations in closed tubes, Journal of Fluid Mechanics 18
(1964), 4466.
[29] B.T. Chu, Analysis of a self-sustained thermally driven nonlinear vibration, The Physics
of Fluids 6 (1963), 16381644.
[30] B.T. Chu and S.J. Ying, Thermally driven nonlinear oscillations in a pipe with traveling
shock waves, The Physics of Fluids 6 (1963), 16251637.
Bibliography 177
[31] A.B. Coppens and A.A. Atchley, Encyclopedia of acoustics, ch. Nonlinear standing
waves in cavities, pp. 237247, Wiley, New York, 1997.
[32] A.B. Coppens and J.V. Sanders, Finite-amplitude standing waves in rigid-walled tubes,
Journal of Acoustical Society of America 43 (1968), 516529.
[33] , Finite-amplitude standing waves within real cavities, Journal of Acoustical
Society of America 58 (1975), 11331140.
[34] W. Dai, E. Luo, Y. Zhang, and H. Ling, Detailed study of a traveling wave thermoacous-
tic refrigerator driven by a traveling wave thermoacoustic engine, Journal of Acoustical
Society of America 119 (2006), 26862692.
[35] A.T.A.M. de Waele, P.P. Steijaert, and J. Gijzen, Thermodynamical aspects of pulse
tubes, Cryogenics 37 (1997), 313324.
[36] S. Dequand, S.J. Hulshoff, and A. Hirschberg, Self-sustained oscillations in a closed
side branch system, Journal of Sound and Vibration 265 (2003), 359386.
[37] J.H.M. Disselhorst and L. van Wijngaarden, Flow in the exit of open pipes during
acoustic resonance, Journal of Fluid Mechancis 99 (1980), 293321.
[38] D.G. Duffy, Greens functions with applications, Chapman and Hall, London, 2001.
[39] B.O. Eno and C.M. Hedberg, Theory of nonlinear acoustics in uids, Kluwer Aca-
demic Publishers, Dordrecht, 2002.
[40] , Theory of nonlinear acoustics in uids, ch. Nonlinear standing waves in
closed tubes, Kluwer Academic Publishers, Dordrecht, 2002.
[41] K.T. Feldman Jr., Review of the literature on rijke thermoacoustic phenomena, Journal
of Sound and Vibration 7 (1968), 8389.
[42] , Review of the literature on sondhauss thermoacoustic phenomena, Journal of
Sound and Vibration 7 (1968), 7182.
[43] D.F. Gaitan and A. Atchley, Finite amplitude standing waves in harmonic and anhar-
monic tubes, Journal of Acoustical Society of America 93 (1993), 24892495.
[44] D.L. Gardner, J.R. Olson, and G.W. Swift, Turbulent losses in thermoacoustic res-
onators, Journal of Acoustical Society of America 98 (1995), 2961.
[45] S.L. Garrett, Thermoacoustic engines and refrigerators, American Journal of Physics
72 (2004), 1117.
[46] S.L. Garrett, J.A. Adeff, and T.J. Hoer, Thermoacoustic refrigerator for space applica-
tions, Journal of Thermophysics and Heat Transfer 7 (1993), 595599.
[47] S.L. Garrett and S. Backhauss, The power of sound, American Scientist 88 (2000),
516525.
[48] W.E. Gifford and R.C. Longsworth, Surface heat pumping, Advances in Cryogenic
Engineering 1 (1966), 302.
178 Bibliography
[49] V. Gusev, H. Bailliet, P. Lotton, and M. Bruneau, Asymptotic theory of nonlinear
acoustic waves in a thermoacoustic prime-mover, Acustica 86 (2000), 2538.
[50] V. Gusev, S. Job, H. Bailliet, P. Lotton, and M. Bruneau, Acoustic streaming in an-
nular thermoacoustic prime-movers, Journal of Acoustical Society of America 108
(2000), 934945.
[51] V.E. Gusev, Build-up of forced oscillations in acoustic oscillators, Soviet Physics -
Acoustics 30 (1984), 121125.
[52] M.F. Hamilton, Y.A. Ilinskii, and E.A. Zabolotskaya, Acoustic streaming generated by
standing waves in two-dimensional channels of arbitrary width, Journal of Acoustical
Society of America 113 (2003), 153160.
[53] L.S. Han, Hydrodynamic entrance lengths for incompressible laminar ow in rectangular
ducts, Journal of Applied Mechanics 27 (1960), 403409.
[54] B. Higgins, Journal of Natural Philosophy and Chemical Arts 129 (1802), 22.
[55] T.J. Hoer, Thermoacoustic refrigerator design and performance, PhD Thesis, Physics
department, University of California, San Diego, 1986.
[56] T.J. Hoer, J.C. Wheatley, G.W. Swift, and A. Migliori, Acoustic cooling engine,
(1988), US Patent No. 4,722,201.
[57] M.H. Holmes, Introduction to perturbation methods, Springer, New York, 1995.
[58] Ulrich Hornung (ed.), Homogenization and porous media, Springer-Verlag New
York, Inc., New York, NY, USA, 1997.
[59] Y. Ilinskii, B. Lipkens, T.S. Lucas, D.K. Perkins, and T.W. van Doren, Measurements
of macrosonic standing waves in oscillating closed cavities, Journal of Acoustical Soci-
ety of America 104 (1998), 623636.
[60] Y. Ilinskii, B. Lipkens, T.S. Lucas, T.W. van Doren, and E.A. Zabolotskaya, Nonlin-
ear standing waves in an acoustical resonator, Journal of Acoustical Society of Amer-
ica 104 (1998), 26642674.
[61] P.H.M.W. in t panhuis, S.W. Rienstra, J. Molenaar, and J.J.M. Slot, Weakly nonlin-
ear thermoacoustics for stacks with slowly varying pore cross-sections, Journal of Fluid
Mechanics 618 (2009), 4170.
[62] J. Jiminez, Nonlinear gas oscillations in pipes. Part 1: Theory, Journal of Fluid Me-
chanics 59 (1973), 2346.
[63] M. M. Kami nski, On probabilistic viscous incompressible ow of some composite uids,
Computational Mechanics 28 (2002), 505517.
[64] A.A. Karabutov, E.A. Lapshin, and O.V. Rudenko, Interaction between light waves
and sound under acoustic nonlinearity conditions, Journal of Experimental and Theo-
retical Physics 44 (1976), 58.
Bibliography 179
[65] J. Keller, Resonant oscillations in closed tubes: the solution of Chesters equation, Journal
of Fluid Mechanics 77 (1976), 279304.
[66] G. Kirchhoff, Ueber den Einuss der W armteleitung in einem Gas auf die Schallbewe-
gung, Annalen der Physik 134 (1868), 177.
[67] H.A. Kramers, Vibrations of a gas column, Physica 15 (1949), 971.
[68] P.C. Kriesels, M.C.A.M. Peters, A. Hirschberg, and A.P.J. Wijands, High amplitude
vortex-induced pulsations in a gas transport system, Journal of Sound and Vibration
184 (1995), 343368.
[69] E. Kr oner, Modeling small deformations of polycrystals, ch. Statistical modeling, Else-
vier, London, 1986.
[70] V.P. Kuznetsov, Equations of nonlinear acoustics, Soviet Physics - Acoustics 16 (1971),
467470.
[71] L.D. Landau and E. M. Lifshitz, Fluid mechanics, Pergamon Press, Oxford, 1959.
[72] S. Laplace, Equations of nonlinear acoustics, Annales des Chemie et des Physique 3
(1816), 328.
[73] J. Liang, Thermodynamic cycles in oscillating ow regenerators, Journal of Applied
Physics 82 (1997), 41594165.
[74] W. Licht Jr. and D.G. Stechert, The variation of the viscosity of gases and vapors with
temperature, Journal of Physical Chemistry 48 (1944), 2347.
[75] J. Lighthill, Acoustic streaming, Journal of Sound and Vibration 61 (1978), 391418.
[76] H. Ling, E. Luo, and W. Dai, A numerical simulation method and analysis of a complete
thermoacoustic-stirling engine, Ultrasonics 44 (2006), 15111514.
[77] E. Luo, W. Dai, Y. Zhang, and H. Ling, Thermoacoustically driven refrigerator with
double thermoacoustic-stirling cycles, Applied Physics Letters 88 (2006), 15111514.
[78] J.A. Lycklama ` a Nijeholt, M.E.H. Tijani, and S. Spoelstra, Simulation of a traveling-
wave thermoacoustic engine using computational uid dynamics, Journal of Acoustical
Society of America 118 (2005), 22652270.
[79] I. Lyulina, Numerical simulation of pulse-tube refrigerators, PhD Thesis, Eind-
hoven University Press, 2005,
http://alexandria.tue.nl/extra2/200510289.pdf.
[80] I.A. Lyulina, R.M.M. Mattheij, A.S. Tijsseling, and A.T.A.M. de Waele, Numerical
simulation of pulse-tube refrigerators, International Journal of Nonlinear Sciences
and Numerical Simulation 74 (2003), 9197.
[81] , Numerical simulation of pulse-tube refrigerators: 1d model, Proceedings of the
Eurotherm Seminar: Heat Transfer in Unsteady and Transitional Flows 5 (2004),
7988, 287.
180 Bibliography
[82] S. Makarov and M. Ochmann, Nonlinear and thermoviscous phenomena in acoustics,
Part I, Acustica 82 (1996), 579606.
[83] , Nonlinear and thermoviscous phenomena in acoustics, Part II, Acustica 83
(1997), 197222.
[84] J.L. Martin, J.A. Corey, and C.M. Martin, A pulse-tube cryocooler for telecommunica-
tions applications, Cryocoolers 10 (1999), 181189.
[85] R.M.M. Mattheij, S.W. Rienstra, and J.H.M. ten Thije Boonkkamp, Partial differen-
tial equations: Modeling, analysis, computation, SIAM, Philadelphia, 2005.
[86] D.J. McKelvey and S.C. Ballister, Shipboard electronic thermoacoustic cooler, Masters
of Science in Engineering Acoustics and Master of Science in Applied Physics
(1995), 161, DTIC Report No. AD A300-514.
[87] L. Menguy and J. Gilbert, Weakly nonlinear gas oscillations in air-lled tubes; solutions
and experiments, Acustica 86 (2000), 798810.
[88] P. Merkli and H. Thomann, Thermoacoustic effects in a resonant tube, Journal of Fluid
Mechanics 70 (1975), 161.
[89] , Transition to turbulence in oscillating pipe-ow, Journal of Fluid Mechanics
68 (1975), 567575.
[90] G. Mozurkewich, Time-average temperature distribution in a thermoacoustic stack,
Journal of Acoustical Society of America 103 (1998), 380388.
[91] U.A. M uller and N. Rott, Thermally driven acoustic oscillations. Part VI: Excitation
and power, Journal of Applied Mathematics and Physics 34 (1983), 609626.
[92] I. Newton, Philosophicae naturalis principia mathematica, vol. II, London, 1687,
http://www.archive.org/details/newtonspmathema00newtrich.
[93] A.L. Ni, Non-linear resonant oscillations of a gas in a tube under the action of a periodi-
cally varying pressure, PMM USSR 47 (1983), 498506.
[94] Ch. Nyberg, Spectral analysis of a two frequency driven resonance in a closed tube,
Acoustical Physics 45 (1999), 94104.
[95] W.L.M. Nyborg, Physical Acoustics, vol. IIB, ch. Acoustic streaming, p. 265, Aca-
demic, New York, 1965.
[96] M. Ochmann and S. Makarov, Nonlinear and thermoviscous phenomena in acoustics,
Part III, Acustica 83 (1997), 827846.
[97] J.R. Olson and G.W. Swift, Similitude in thermoacoustics, Journal of Acoustical So-
ciety of America 95 (1994), 14051412.
[98] , Acoustic streaming in pulse-tube refrigerators: Tapered pulse tubes, Cryogenics
(1997), 769776.
Bibliography 181
[99] A. Piccolo and G. Pistone, Computation of the time-averaged temperature elds and
energy uxes in a thermally isolated thermoacoustic stack at low acoustic mach numbers,
International Journal of Thermal Sciences 46 (2007), 235244.
[100] M.E. Poesse and S.L. Garrett, Performance measurements on a thermoacoustic refriger-
ator driven at high amplitudes, Journal of Acoustical Society of America 107 (2000),
24802486.
[101] M.E. Poesse, R.W. Smith, S.L. Garrett, R. van Gerwen, and P. Gosselin,
Thermoacoustic refrigeration for ice cream sales, Proceedings of 6th Gustav
Lorentzen Natural Working Fluids Conference (2004),
http://www.thermoacousticscorp.com/pdf/10.pdf.
[102] A.A. Putnam and W.R. Dennis, Survey of organ-pipe oscillations in combustion sys-
tems, Journal of Acoustical Society of America 28 (1956), 246.
[103] M. Quintard and S. Whitaker, Transport in ordered and disordered porous media:
volume-averaged equations, closure problems, and comparison wiht experiments, Chem-
ical Engineering Science 48 (1993), 25372564.
[104] R. Radebaugh, A review of pulse tube refrigeration, Advances in Cryogenic Engi-
neering 35 (1990), 11911205.
[105] , Development of the pulse tube refrigerator as an efcient and reliable cryocooler,
Proceedings of the Institute of Refrigeration 96 (1999), 127.
[106] R. Raspet, H.E. Bass, and J. Kordomenos, Thermoacoustics of traveling waves: Theo-
retical analysis for an inviscid ideal gas, Journal of Acoustical Society of America 94
(1993), 22322239.
[107] R. Raspet, J. Brewster, and H.E. Bass, A new approximation method for thermoacoustic
calculations, Journal of Acoustical Society of America 103 (1998), 23952400.
[108] R.L. Raun, M.W. Beckstead, J.C. Finlinson, and K.P. Brooks, A review of rijke tubes,
rijke burners and related devices, Progress in Energy and Combustion Science 19
(1993), 313364.
[109] Lord Rayleigh, Theory of sound, Vol. II, Dover, New York, 1945.
[110] S.W. Rienstra and A. Hirschberg, An introduction into acoustics, ch. Websters horn
equation, pp. 237239, Eindhoven University of Technology, Eindhoven, 2008,
http://www.win.tue.nl/
sjoerdr/papers/boek.pdf.
[111] P.L. Rijke, Notiz uber eine neue Art, die in einer an beiden Enden offenen Rohre enthal-
tene Lift in Schwingungen zu versetzen, Annalen der Physik 107 (1859), 339.
[112] P. Riley, Pot boiler, Design Engineering (2007), 2930,
http://secure.theengineer.co.uk/Articles/303620/Pot+boiler.htm.
[113] H.S. Roh, W.P. Arnott, J.M. Sabatiera, and R. Raspet, Measurement and calculation
of acoustic propagation constants in arrays of small air-lled rectangular tubes, Journal
of Acoustical Society of America 89 (1991), 26172624.
182 Bibliography
[114] H.S. Roh, R. Raspet, and H.E. Bass, Parallel capillary-tube-based extension of thermoa-
coustic theory for random porous media, Journal of Acoustical Society of America 121
(2007), 14131422.
[115] N. Rott, Damped and thermally driven acoustic oscillations in wide and narrow tubes,
Journal of Applied Mathematics and Physics 20 (1969), 230243.
[116] , Thermally driven acoustic oscillations. Part II: Stability limit for helium, Jour-
nal of Applied Mathematics and Physics 24 (1973), 5472.
[117] , The inuence of heat conduction on acoustic streaming, Journal of Applied
Mathematics and Physics 25 (1974), 417421.
[118] , Thermally driven acoustic oscillations. Part III: Second-order heat ux, Journal
of Applied Mathematics and Physics 26 (1975), 4349.
[119] , Thermoacoustics, Advances in Applied Mechanics 20 (1980), 135175.
[120] N. Rott and G. Zouzoulas, Thermally driven acoustic oscillations. Part IV: Tubes with
variable cross-section, Journal of Applied Mathematics and Physics 27 (1976), 197
224.
[121] , Thermally driven acoustic oscillations. Part V: Gas-liquid oscillations, Journal
of Applied Mathematics and Physics 27 (1976), 325334.
[122] O.V. Rudenko, C.M. Hedberg, and B.O. Eno, Nonlinear standing waves in a layer
excited by the periodic motion of its boundary, Acoustical Physics 47 (2001), 525533.
[123] W.V. Slaton, No moving parts electrical power generation for down-well environments
or other remote locations, Technische Universiteit Eindhoven, Eindhoven, 2003.
[124] W.V. Slaton and J.C.H. Zeegers, Acoustic power measurements of a damped aeroacous-
tically driven resonator, Journal of Acoustical Society of America 118 (2005), 8391.
[125] , An aeroacoustically driven thermoacoustic heat pump, Journal of Acoustical
Society of America 117 (2005), 36283635.
[126] C. Sondhauss, Ueber die Schallschwingungen der Luft in erhitzten Glasr ohren und in
gedeckten Pfeifen von ungleicher Weite, Annalen der Physik 79 (1850), 1.
[127] S. Spoelstra and M.E.H. Tijani, Thermoacoustic heat pumps for energy savings,
Proceedings of Boundary Crossing Acoustics (2005), 123,
http://www.ecn.nl/docs/library/report/2005/rx05159.pdf.
[128] M.R. Stinson, The propagation of plane sound waves in narrow and wide circular tubes,
and generalization to uniform tubes of arbitrary cross-sectional shape, Journal of Acous-
tical Society of America 89 (1991), 550558.
[129] M.R. Stinson and Y. Champoux, Assignment of shape factors for porous materials hav-
ing simple pore geometries, Journal of Acoustical Society of America 88 (1990), S121.
[130] G.W. Swift, LANL Thermoacoustics Animations, Los Alamos National Laboratory,
http://www.lanl.gov/thermoacoustics/movies.html.
Bibliography 183
[131] , Thermoacoustic engines, Journal of Acoustical Society of America 84 (1988),
11461180.
[132] , Analysis and performance of a large thermoacoustic engine, Journal of Acous-
tical Society of America 92 (1992), 15511563.
[133] , Thermoacoustic engines and refrigerators, Physics Today (1995), 2228.
[134] , Thermoacoustic natural gas liqueer, Proceedings of the Department of En-
ergy Natural Gas Conference (1997),
http://www.netl.doe.gov/publications/proceedings/97/97ng/ng97_pdf/
NG7-1.PDF.
[135] , A unifying perspective for some engines and refrigerators, Acoustical Society
of America, Melville, 2002.
[136] G.W. Swift and R.M. Keolian, Thermoacoustics in pin-array stacks, Journal of Acous-
tical Society of America 94 (1993), 941943.
[137] G.W. Swift and W.C Ward, Simple harmonic analysis of regenerators, Journal of Ther-
mophysics and Heat Transfer 10 (1996), 652662.
[138] G.W. Swift and J. Wollan, Thermoacoustics for liquefaction of natural gas, Los Alamos
National Laboratory (2002), 2126,
http://www.lanl.gov/thermoacoustics/Pubs/GasTIPS.pdf.
[139] K.W. Taconis, Vapor-liquid equilibrium of solutions of
3
He in
4
He, Physica 15 (1949),
738.
[140] E. Tward, M. Petach, and S. Backhaus, Thermoacoustic space power converter, Space
Technology and Applications International Forum, AIP Conference Proceedings
654 (2003), 656661.
[141] Y. Ueda and C. Kato, Stability analysis of thermally induced spontaneous gas oscil-
lations in straight and looped tubes, Journal of Acoustical Society of America 124
(2008), 851858.
[142] Y. Ueda, T. Kato, and C. Kato, Experimental evaluation of the acoustic properties of
stacked-screen regenerators, Journal of Acoustical Society of America 125 (2009),
780786.
[143] M. Van Dyke, Slow variations in continuum mechanics, Advances in Applied Me-
chanics 25 (1987), 145.
[144] L. van Wijngaarden, Symposium on Applied Mathematics, dedicated to the late Prof.
Dr. R. Ti, ch. Nonlinear acoustics, pp. 5168, Delft University Press., Delft, 1978.
[145] G. Walker, Stirling engines, Clarendon, Oxford, 1960.
[146] W.C. Ward, J. Clark, and G.W. Swift, Design Environment for Low-amplitude
Thermoacoustic Energy Conversion, Los Alamos National Laboratory (2008),
http://www.lanl.gov/thermoacoustics/DeltaEC.html.
184 Bibliography
[147] W.C. Ward and G.W. Swift, Design environment for low-amplitude thermoacoustic en-
gines, Journal of Acoustical Society of America 95 (1994), 36713672.
[148] R. Waxler, Stationary velocity and pressure gradients in a thermoacoustic stack, Journal
of Acoustical Society of America 109 (2001), 27392750.
[149] A.G. Webster, Acoustical impedance, and the theory of horns and of the phonograph,
Proceedings of the National Academy of Academic Sciences 5 (1919), 275282.
[150] J.C. Wheatley and A. Cox, Natural egines, Physics Today 38 (1985), 5058.
[151] J.C. Wheatley, T. Hoer, G.W. Swift, and A. Migliori, An intrinsically irreversible
thermoacoustic heat engine, Journal of Acoustical Society of America 74 (1983), 153
170.
[152] , Understanding some simple phenomena in thermoacoustics with applications to
acoustical heat engines, American Journal of Physics 53 (1985), 147.
[153] J.C. Wheatley, G.W. Swift, and A. Migliori, The natural heat engine, Los Alamos
Science (1986),
http://www.fas.org/sgp/othergov/doe/lanl/pubs/00326875.pdf.
[154] T. Yazaki, T. Biwa, and A. Tominaga, A pistonless stirling cooler, Applied Physics
Letters 80 (2002), 157159.
[155] T. Yazaki, A. Iwata, T. Maekawa, and A. Tominaga, Traveling wave thermoacoustic
engine in a looped tube, Physical Review Letters 81 (1998), 31283131.
[156] T. Yazaki, A. Tominaga, and Y. Narahara, Stability limit for thermally driven acoustic
oscillations, Cryogenics 19 (1979), 393396.
[157] A. Zaoui, Homogenization techniques for composite media, ch. Approximate statistical
modelling and applications, Berlin, 1987.
[158] L. Zoontjens, C.Q. Howard, A.C. Zander, and B.S. Cazzolato, Numerical comparison
of thermoacoustic couples with modied stack plate edges, International Journal of Heat
and Mass Transfer 51 (2008), 48294840.
Index
A
acoustics . . . . . . . . . . . . . . . . . . . . . . . . 1, 39, 74
adiabatic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
airconditioning . . . . . . . . . . . . . . . . . . . . . . . . 12
approximation
boundary-layer . . . . . . . . . . . . . . . . . . . 96
short-stack . . . . . . . . . . . . . . . . 54, 96, 161
wide-channel . . . . . . . . . . . . . . . . . . . . . 56
asymptotics . . . . . . . . . . . . . . . . . . . 12, 34, 161
attenuation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
B
Bernoulli
effect . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
equation . . . . . . . . . . . . . . . . . . . . . . . . . 136
bucket-brigade effect . . . . . . . . . . . . . . . . . . 25
Buckingham theorem . . . . . . . . . . . . . . . 31
C
coefcient of performance . . . . 19, 101, 103
Carnot . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
relative . . . . . . . . . . . . . . . . . . . . . . . 19, 103
composite expansion . . . . . . . . . . . . . . . . . 144
conservation . . . . . . . . . . . . . . . . . . . . . . . . . . 28
energy . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
mass . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
momentum . . . . . . . . . . . . . . . . . . . . . . . 28
convective derivative . . . . . . . . . . . . . . . . . . 28
critical temperature gradient . . . . . . . . . 103
cross-sections
cylindrical . . . . . . . . . . . . . . . . . . . . . 14, 73
parallel-plate . . . . . . . . . . . . . . 14, 37, 96
pin-array . . . . . . . . . . . . . . . . . . . . . . 14, 73
rectangular . . . . . . . . . . . . . . . . . . . . 14, 73
triangular . . . . . . . . . . . . . . . . . . . . . 14, 73
wired-mesh . . . . . . . . . . . . . . . . . . . . . . . 73
cryocooling . . . . . . . . . . . . . . . . . . . . . . . . . 4, 11
cycle
Brayton . . . . . . . . . . . . . . . . . . . . . . . . 7, 20
Stirling . . . . . . . . . . . . . . . . . . . . . . . . . 7, 20
thermodynamic . . . . . . . . . . . . . . . . 7, 20
D
Darcys law . . . . . . . . . . . . . . . . . . . . . . . . . . 121
DeltaE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
DeltaEC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
devices
heat-driven . . . . . . . . . . . . . . . . . . . . . . . . 8
sound-driven . . . . . . . . . . . . . . . . . . . . . . 8
dimensional analysis . . . . . . . . . . . . . . . . . . 12
dimensionless parameters . . . . . . 13, 15, 31
dissipation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
thermal-relaxation . . . . . . . . . . . 68, 100
viscous . . . . . . . . . . . . . . . . . . . . . . . 68, 100
down-well power generation . . . . . . . . . . 10
E
efciency . . . . . . . . . . . . . . . . . . 1, 20, 119, 125
Carnot . . . . . . . . . . . . . . . . . . . . . . . 20, 119
relative . . . . . . . . . . . . . . . . . . . . . . . 20, 119
entropy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
F
food refrigerators . . . . . . . . . . . . . . . . . . . . . 12
Fourier transform
continuous . . . . . . . . . . . . . . . . . . . . . . 140
discrete . . . . . . . . . . . . . . . . . . . . . . . . . . 158
Fouriers law . . . . . . . . . . . . . . . . . . . . . . . . . . 29
G
gas liquefaction . . . . . . . . . . . . . . . . . . . . . . . 11
Greens function . . . . . . . . . . . . . . . . . . 73, 169
H
harmonics
rst . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
higher . . . . . . . . . . . . . . . . 15, 95, 133, 161
second . . . . . . . . . . . . . . . . . 14, 35, 61, 86
186 Index
I
industrial waste heat . . . . . . . . . . . . . . . . . . 11
inner solution . . . . . . . . . . . . . . . . . . . 144, 148
integral equations . . . . . . . . . . . . . . . . 73, 170
integrating factor . . . . . . . . . . . . . . . . . . . . . 149
irrotational ow . . . . . . . . . . . . . . . . . . . . . . 134
K
Kuznetsovs equation . . . . . . . . . . . . . . . . 134
L
least-squares solution . . . . . . . . . . . . . . . . 122
Los Alamos National Laboratory . . . 11, 16
M
Mathieu functions . . . . . . . . . . . . . . . . . . . . 143
method
homogenization . . . . . . . . . . . . . . . . . . 14
matched asymptotic expansions . 144
slow variation . . . . . . . . . . . . . . . . . . . . 37
N
nondimensionalization . . . . . . . . . . . . . . . . 13
nonlinearities . . . . . . . . . . . . . . . . 13, 100, 134
O
oscillations
heat-driven . . . . . . . . . . . . . . . . . . . . . . . . 8
sound-driven . . . . . . . . . . . . . . . . . . . . . . 8
outer solution . . . . . . . . . . . . . . . . . . . 144, 148
P
pulse-tube refrigerator . . . . . . . . . . . . . . . . . . 4
R
reection condition . . . . . . . . . . . . . . . . . . 134
regenerator . . . . . . . . . . . . . . . . . . . . . . . 5, 9, 24
resonance . . . . . . . . . . . . . . . . . . . . . . . 139, 141
frequency . . . . . . . . . . . . . . . . . . . . . . . 134
Rijke tube . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
S
SCORE stove . . . . . . . . . . . . . . . . . . . . . . . . . . 12
self-consistent models . . . . . . . . . . . . . . . . . 14
self-oscillation . . . . . . . . . . . . . . . . . . . . . . . . . 15
above . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
below . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
through . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
shock waves . . . . . . . . . 15, 95, 133, 155, 158
side branch . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
singing ame . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
Sondhauss tube . . . . . . . . . . . . . . . . . . . . . . . . 3
speed of sound . . . . . . . . . . . . . . . . . . . . 2, 165
stack . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4, 9, 22
standing wave . . . . . . . . . . . . . . . 6, 9, 20, 162
nonlinear . . . . . . . . . . . . . . . . . . . . . . . . 133
standing-wave . . . . . . . . . . . . . . . . . . . . . . . . 93
statistical modeling . . . . . . . . . . . . . . . . . . . . 14
streaming . 14, 15, 35, 59, 85, 112, 123, 127,
161
Gedeon . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
inner . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Rayleigh . . . . . . . . . . . . . . . . . . . . . . 29, 59
Sutherlands formula . . . . . . . . . . . . . . . . . . 29
T
Taconic oscillations . . . . . . . . . . . . . . . . . . . . . 3
thermoacoustic
couple . . . . . . . . . . . . . . . . . . . . . . . 96, 157
devices . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
heat pump . . . . . . . . . . . . . . . . . . . 1, 7, 19
prime mover . . . . . . . . . 1, 7, 8, 108, 133
refrigerator . . . . . . . 1, 7, 8, 19, 100, 157
thermoacoustics . . . . . . . . . . . . . . . . . . . . . . . . 1
spacecraft . . . . . . . . . . . . . . . . . . . . . . . . . 12
weakly nonlinear . . . . . . . . . . . . . . . . . 12
thermodynamics . . . . . . . . . . . . . . . . . . 1, 6, 17
laws . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
transition effects . . . . . . . . . . . . . . . . . . . . . . . 15
traveling wave . . . . . . . . . . . . . . . 6, 9, 22, 162
turbulence . . . . . . . . . . . . . . . . . . . . . . . 2, 15, 95
V
volume-averaging techniques . . . . . . . . . 14
vortex shedding . . . . . . . . . . . . . . . . . . . . . . . . 2
Summary
This thesis addresses the mathematical aspects of thermoacoustics, a subeld within
physical acoustics that comprises all effects in which heat conduction and entropy vari-
ations of the gaseous medium play a role. We focus specically on the theoretical basis
of two kinds of devices: the thermoacoustic prime mover, that uses heat to produce
sound, and the thermoacoustic heat pump or refrigerator, that use sound to produce
heating or cooling.
Two kinds of geometry are considered. The rst one is the so-called standing-wave
geometry that consists of a closed straight tube (the resonator) with a porous medium
(the stack) placed inside. The second one is the so-called traveling-wave geometry that
consists of a resonator attached to a looped tube with a porous medium (regenerator)
placed inside. The stack and the regenerator differ in the sense that the regenerator uses
thinner pores to ensure perfect thermal contact. The stack or regenerator can in principle
have any arbitrary shape, but are modeled as a collecting of long narrow arbitrarily
shaped pores. If the purpose of the device is to generate cooling or heating, then usually
a speaker is attached to the regenerator to generate the necessary sound.
By means of a systematic approach based on small-parameter asymptotics and di-
mensional analysis, we have derived a general theory for the thermal and acoustic be-
havior in a pore. First a linear theory is derived, predicting the thermoacoustic behavior
between two closely placed parallel plates. Then the theory is extended by consider-
ing arbitrarily shaped pores with the only restriction that the pore cross-sections vary
slowly in longitudinal direction. Finally, the theory is completed by the inclusion of
nonlinear second-order effects such as streaming, higher harmonics, and shock-waves.
It is shown how the presence of any of these nonlinear phenomena (negatively) affects
the performance of the device.
The nal step in the analysis is the linking of the sound eld in the stack or regenera-
tor to that of the main tube. For the standing-wave device this is rather straightforward,
but for the traveling-wave device all sorts of complications arise due to the complicated
geometry. A numerical optimization routine has been developed that chooses the right
geometry to ensure that all variables match continuously across every interface and the
right ow behavior is attained at the position of the regenerator. Doing so, we can pre-
dict the ow behavior throughout the device and validate it against experimental data.
The numerical routine can be a valuable aid in the design of traveling-wave devices;
by variation of the relevant problem parameters one can look for the optimal traveling-
wave geometry in terms of power output or efciency.
188 Summary
Samenvatting
Dit proefschrift is gewijd aan de wiskundige aspecten van thermoakoestiek, het vakge-
bied dat bestaat uit alle akoestische verschijnselen waarin de warmtegeleiding en en-
tropie variaties van het gas een rol spelen. In het bijzonder richten we ons op de the-
oretische fundamenten van twee soorten thermoakoestische apparaten: de motor, die
warmte omzet in geluid, en de warmtepomp of koelkast, die geluid gebruiken om ver-
warming of koeling te genereren.
We onderscheiden staande-golf en lopende-golf systemen. De staande-golf systemen
maken maken gebruik van een gesloten rechte buis (de resonator) waarin een poreus
medium, de stack, geplaatst wordt om warmte omte zetten in geluid of geluid in warmte.
De stack is opgebouwd uit nauwe kanaaltjes met willekeurige doorsneden. Als het doel
van het apparaat koelen of verwarmen is, dan is het gebruikelijk om de buis met een
luidspreker te verbinden om het noodzakelijke geluid te genereren. In de lopende-golf
systemen wordt de resonator gecombineerd met een lusvormige geometrie en wordt
de stack vervangen door een regenerator. De lusvormige geometrie is nodig om het
geluidsveld in de regenerator het lopende golf karakter te geven. De regenerator is ver-
gelijkbaar met de stack, maar heeft veel nauwere kanaaltjes om perfect warmte-contact
met het gas te garanderen.
Gebruik makend van een systematische aanpak, gebaseerd op dimensie analyse en
kleine-parameter asymptotiek, hebben we getracht een algemene thermoakoestische
theorie af te leiden. We beginnen met een lineaire theorie, die het thermoakoestische
gedrag voorspelt tussen twee parallelle platen. Vervolgens wordt de theorie uitge-
breid door willekeurige drie-dimensionale stack kanalen te beschouwen met de enige
beperking dat de dwarsdoorsneden langzaam veranderen in axiale richting. Uitein-
delijk wordt de theorie voltooid door het toevoegen van kwadratische niet-lineaire ef-
fecten zoals hogere harmonischen, schok golven, of stromingseffecten. Bovendien laten
we zien hoe de aanwezigheid van deze niet-lineaire effecten de prestaties van de ther-
moakoestische apparaten (negatief) benvloedt.
De laatste stap in de analyse is de koppeling tussen het geluidsveld in de stack of
regenerator en het geluidsveld van de hoofdbuis. Dit is relatief eenvoudig voor de
staande-golf apparaten, maar de lopende-golf apparaten vereisen een speciale aanpak
vanwege hun complexe geometrie. We hebben een numerieke optimalisatie routine ont-
wikkeld die voor elke sectie de juiste afmetingen uitrekent zodat alle variabelen continu
aansluiten over elke interface en het gewenste geluidsveld bereikt wordt bij de regene-
rator. Op deze manier kan men het hele apparaat doorrekenen en valideren met met
experimentele data. De numerieke routine kan een waardevolle houvast zijn voor het
ontwerpen van praktische lopende-golf apparaten.
190 Samenvatting
Curriculum Vitae
Peter in t panhuis was born in Roermond, The Netherlands, on July 10th 1981. After n-
ishing his pre-university education in Sittard at the Serviam College (now Trevianum)
in 1999, he started his studies in Technical Mathematics at the Eindhoven University of
Technology that same year. During his studies he did an internship at the Marcus Wal-
lenberg Laboratory in Stockholm, Sweden, entitled Calculations of the acoustic end
correction of a semi-innite circular pipe issuing a subsonic cold or hot het with co-
ow. In April 2005 he obtained his masters degree in Industrial and Applied Math-
ematics after writing a masters thesis entitled Li-ion battery modelling under the
supervision of prof.dr. Hans van Duijn and dr. Evgeniy Verbitskiy.
From May 2005 till June 2009 he has been working as a PhD student at the Eind-
hoven University of Technology within the Applied Analysis group, which is part of the
Department of Mathematics and Computer Science, and the Low Temperature group,
which is part of the Department of Applied Physics. This project, entitled High-amplitude
oscillatory gas ow in interaction with solid boundaries, was sponsored by the Technl-
ogy Foundation (STW) and was performed under the supervision of dr. Sjoerd Rienstra,
prof.dr. Han Slot, prof.dr. Jaap Molenaar, and dr. Jos Zeegers.
In addition to writing this thesis, he has taught classes to students of various faculties
at the Eindhoven University of Technology. Moreover, he has participated in four study
groups Mathematics with Industry at universities in the Netherlands (Eindhoven,
Utrecht) and Denmark (Odense, Lyngby).
You might also like
- Stephan GeertsDocument252 pagesStephan GeertsEswaran ManakorNo ratings yet
- 5 Steps To A 5 AP Physics C 2017 - McGraw-HillDocument299 pages5 Steps To A 5 AP Physics C 2017 - McGraw-HillRishit Kalra100% (1)
- Flushmate 501B Series Owners Service ManualDocument6 pagesFlushmate 501B Series Owners Service ManualiloNo ratings yet
- Kramer Steven PDFDocument32 pagesKramer Steven PDFFurkan YılmazNo ratings yet
- Unsteady Flows in a Transonic Turbine RotorDocument314 pagesUnsteady Flows in a Transonic Turbine RotorM usman qureshiNo ratings yet
- DR Ebba (Proposal-Sample)Document29 pagesDR Ebba (Proposal-Sample)Boaz Tamire HabteNo ratings yet
- Ac and Noise Analysis of Deep-Submicron MosfetsDocument124 pagesAc and Noise Analysis of Deep-Submicron MosfetsRoshdy AbdelRassoulNo ratings yet
- Heat Sink OptimizationDocument207 pagesHeat Sink OptimizationRichard LoNo ratings yet
- Hognabba KimDocument88 pagesHognabba KimرضاNo ratings yet
- (Topics in Applied Physics 118) Sebastian Volz (Auth.), Sebastian Volz (Eds.) - Thermal Nanosystems and Nanomaterials (2009, Springer-Verlag Berlin Heidelberg) PDFDocument591 pages(Topics in Applied Physics 118) Sebastian Volz (Auth.), Sebastian Volz (Eds.) - Thermal Nanosystems and Nanomaterials (2009, Springer-Verlag Berlin Heidelberg) PDFAlejandro PuceiroNo ratings yet
- Eth 48770 02Document252 pagesEth 48770 02VaradhaYamunan KKNo ratings yet
- TeseMestrado DanielFerreira68410Document60 pagesTeseMestrado DanielFerreira68410kenantrk44No ratings yet
- Numerical Investigation of The Use of Nanofluid in A Photovoltaic Thermal SystemDocument90 pagesNumerical Investigation of The Use of Nanofluid in A Photovoltaic Thermal SystemNajiba HamadNo ratings yet
- 2023 08 29 - Thermal Modeling - FinalDocument124 pages2023 08 29 - Thermal Modeling - FinalMatej TomićNo ratings yet
- Modelling and Design of Graphene-Based THZ DevicesDocument162 pagesModelling and Design of Graphene-Based THZ DevicesMohamed MOUMOUNo ratings yet
- 5Document143 pages5mustafa11dahamNo ratings yet
- The Numerical Investigation of Outlet Guide Vane Heat TransferDocument78 pagesThe Numerical Investigation of Outlet Guide Vane Heat TransferMatej TomićNo ratings yet
- Scaling Laws and Electron Properties in Hall Effect ThrustersDocument176 pagesScaling Laws and Electron Properties in Hall Effect Thrustersaakash30janNo ratings yet
- Popp ThesisDocument265 pagesPopp ThesisematlisNo ratings yet
- Air Conditioning SystemsDocument154 pagesAir Conditioning SystemsUrsache GeorgeNo ratings yet
- Thesis CesarDocument246 pagesThesis CesarCésar HueteNo ratings yet
- Essentials of Heat TransferDocument179 pagesEssentials of Heat Transferz_artist95No ratings yet
- Fabian Peng Karrholm PH D2008Document110 pagesFabian Peng Karrholm PH D2008Mehdi TimajiNo ratings yet
- Fatigue Design of Hydraulic PHDDocument178 pagesFatigue Design of Hydraulic PHDSándor ÓdorNo ratings yet
- Review of Heat Transfer and Pressure Drop in Single and Two-Phase MicrochannelsDocument20 pagesReview of Heat Transfer and Pressure Drop in Single and Two-Phase MicrochannelsJessica CehNo ratings yet
- PHD Thesis Pepijn de Jong - FinalDocument280 pagesPHD Thesis Pepijn de Jong - FinalsiswoutNo ratings yet
- Electrical Design 3 Final Report (FEMM) PDFDocument34 pagesElectrical Design 3 Final Report (FEMM) PDFThabiso KyleNo ratings yet
- Uncooled Carbon Microbolometer Imager PDFDocument146 pagesUncooled Carbon Microbolometer Imager PDFamtcorporationNo ratings yet
- Thesis SibleyDocument196 pagesThesis SibleymohitNo ratings yet
- 2005 - Active Listening Room Compensation For Spatial Sound Reproduction SystemsDocument293 pages2005 - Active Listening Room Compensation For Spatial Sound Reproduction Systemsarthi_ramaniamNo ratings yet
- Cattafesta MSC Effects OTDF EffDocument0 pagesCattafesta MSC Effects OTDF EffJoe JewellNo ratings yet
- IPF TU DRESDEN PHD Thesis Development of Thermoelectric Materials Based On Polymer NanocompositesDocument157 pagesIPF TU DRESDEN PHD Thesis Development of Thermoelectric Materials Based On Polymer Nanocompositeskaplan mNo ratings yet
- Characterizing Rapidly Sheared Compressible TurbulenceDocument88 pagesCharacterizing Rapidly Sheared Compressible Turbulencemo3tezbaNo ratings yet
- ديناميكا الغازاتDocument123 pagesديناميكا الغازاتKhaled AbdusamadNo ratings yet
- Heat Transfer in Plate Heat Exchangers DesignDocument64 pagesHeat Transfer in Plate Heat Exchangers Designmjaric81No ratings yet
- Experimental Forces on SpheresDocument118 pagesExperimental Forces on SpheresJose Manuel Tejera GonzalvezNo ratings yet
- Tsolas Nicholas 201011 MASc ThesisDocument155 pagesTsolas Nicholas 201011 MASc ThesisUsman SikandarNo ratings yet
- FULLTEXT01Document126 pagesFULLTEXT01Rafael Lopes CostaNo ratings yet
- Tajeda MartinezDocument175 pagesTajeda MartinezGaurav ChopraNo ratings yet
- PashikantiDocument97 pagesPashikantipart rartNo ratings yet
- Introduction to NanotechnologyDocument105 pagesIntroduction to NanotechnologyHENDRIK2011No ratings yet
- CFX ExerciseDocument163 pagesCFX ExerciseMohmmed MahmoudNo ratings yet
- Calculation of Added Mass in The Proximity of The Seabed For An Oscillating DiscDocument64 pagesCalculation of Added Mass in The Proximity of The Seabed For An Oscillating DiscTNTNo ratings yet
- Hysing PHD ThesisDocument134 pagesHysing PHD ThesismohitNo ratings yet
- Analysis of Multiphase Flow Centrifuge Decanter Separator Using CFD SimulationsDocument65 pagesAnalysis of Multiphase Flow Centrifuge Decanter Separator Using CFD SimulationsBaker FES ONGCNo ratings yet
- Pinto 2022Document139 pagesPinto 2022BarasNo ratings yet
- Numerical study of airfoils with porous trailing edgesDocument142 pagesNumerical study of airfoils with porous trailing edgesYash N SNo ratings yet
- BasicsofthermalfieldsDocument232 pagesBasicsofthermalfieldsPeter He ZhengNo ratings yet
- Earth ScienceDocument251 pagesEarth ScienceSteven PentonNo ratings yet
- Soeren KyndeDocument234 pagesSoeren KyndesuncesjajnoNo ratings yet
- Thesis A-TraidiaDocument225 pagesThesis A-TraidiaBassel AlshamiNo ratings yet
- Report Master ThesisDocument125 pagesReport Master ThesisJose Luis Tazzo OsorioNo ratings yet
- B 14873473Document74 pagesB 14873473GiovanniCuocoNo ratings yet
- Ashu WangDocument214 pagesAshu Wang彭俊諺No ratings yet
- Basics of ThermodynamicsDocument341 pagesBasics of ThermodynamicsVinh VuNo ratings yet
- CFD Modeling of CombustionDocument54 pagesCFD Modeling of Combustionsb aliNo ratings yet
- Out 3Document83 pagesOut 3mfmechanicsNo ratings yet
- Yerasimou Y2020Document174 pagesYerasimou Y2020HariPraneeth ENo ratings yet
- F2 DP 2015 Ayas Mehmet MASTER THESIS - PdfinalcorrectionDocument66 pagesF2 DP 2015 Ayas Mehmet MASTER THESIS - PdfinalcorrectionSyed YousufuddinNo ratings yet
- Fundamentals of the Finite Element Method for Heat and Fluid FlowFrom EverandFundamentals of the Finite Element Method for Heat and Fluid FlowNo ratings yet
- Electroanalysis: Theory and Applications in Aqueous and Non-Aqueous Media and in Automated Chemical ControlFrom EverandElectroanalysis: Theory and Applications in Aqueous and Non-Aqueous Media and in Automated Chemical ControlNo ratings yet
- Compact SCR For Passenger CarsDocument9 pagesCompact SCR For Passenger CarsMoses DevaprasannaNo ratings yet
- AE8404 Propulsion-I QBDocument9 pagesAE8404 Propulsion-I QBMoses DevaprasannaNo ratings yet
- CFD Analysis of NH3 Based SCR After Treatment SystemDocument5 pagesCFD Analysis of NH3 Based SCR After Treatment SystemMoses DevaprasannaNo ratings yet
- Thermodynamic processes and cyclesDocument22 pagesThermodynamic processes and cyclesMoses DevaprasannaNo ratings yet
- Methods For Unstructured Grid GenerationDocument12 pagesMethods For Unstructured Grid GenerationMoses DevaprasannaNo ratings yet
- Development of Advanced Urea SCR Systems For Tier2 Bin5 and BeyondDocument13 pagesDevelopment of Advanced Urea SCR Systems For Tier2 Bin5 and BeyondMoses DevaprasannaNo ratings yet
- Control Design of An Automotive Urea SCR CatalystDocument8 pagesControl Design of An Automotive Urea SCR CatalystMoses DevaprasannaNo ratings yet
- Turbulence Modeling ExplainedDocument10 pagesTurbulence Modeling ExplainedMoses DevaprasannaNo ratings yet
- Analysis of Film Cooling and Heat Transfer in Rocket NozzleDocument15 pagesAnalysis of Film Cooling and Heat Transfer in Rocket NozzleMoses DevaprasannaNo ratings yet
- Off Design Flow Phenomena - Air CompressorsDocument18 pagesOff Design Flow Phenomena - Air CompressorsMoses DevaprasannaNo ratings yet
- Diesel EATS Packaging and Flow Optimization On A HDD Engine Powered VehicleDocument13 pagesDiesel EATS Packaging and Flow Optimization On A HDD Engine Powered VehicleMoses DevaprasannaNo ratings yet
- Future - SCR NOx ATS For EU - 6Document17 pagesFuture - SCR NOx ATS For EU - 6Moses DevaprasannaNo ratings yet
- Cost and Fuel Efficient SCR-only Solution For Post-2010 HD Emission StandardsDocument8 pagesCost and Fuel Efficient SCR-only Solution For Post-2010 HD Emission StandardsMoses DevaprasannaNo ratings yet
- Microsoft PowerPoint - OPERATING PRINCIPLE OF AIRCRAFT PISTON ENGINEDocument28 pagesMicrosoft PowerPoint - OPERATING PRINCIPLE OF AIRCRAFT PISTON ENGINEMoses DevaprasannaNo ratings yet
- CE336 09 CorrosionDocument26 pagesCE336 09 CorrosionMoses DevaprasannaNo ratings yet
- Esa - Unit 1 PDFDocument52 pagesEsa - Unit 1 PDFHarish MathiazhahanNo ratings yet
- Cost and Fuel Efficient SCR-only Solution For Post-2010 HD Emission StandardsDocument8 pagesCost and Fuel Efficient SCR-only Solution For Post-2010 HD Emission StandardsMoses DevaprasannaNo ratings yet
- Control of NOx Emissions From Diesel Engine by SCR With UreaDocument2 pagesControl of NOx Emissions From Diesel Engine by SCR With UreaMoses DevaprasannaNo ratings yet
- Airplane GeometryDocument56 pagesAirplane GeometryShravankumar NagapuriNo ratings yet
- Thermodynamics Lab ManualDocument59 pagesThermodynamics Lab ManualMoses DevaprasannaNo ratings yet
- Moire TechniqueDocument15 pagesMoire TechniqueMoses DevaprasannaNo ratings yet
- A Reconfigurable Wing For Biomimetic AircraftDocument12 pagesA Reconfigurable Wing For Biomimetic AircraftMoses DevaprasannaNo ratings yet
- Performance Evaluation of A Urea-Water Selective Catalytic ReductionDocument13 pagesPerformance Evaluation of A Urea-Water Selective Catalytic ReductionMoses DevaprasannaNo ratings yet
- Catalysts: Mechanistic Investigation of The Reduction of NO Over Pt-And Rh-Based LNT CatalystsDocument14 pagesCatalysts: Mechanistic Investigation of The Reduction of NO Over Pt-And Rh-Based LNT CatalystsMoses DevaprasannaNo ratings yet
- Optimization of Urea SCR DeNOx SystemsDocument13 pagesOptimization of Urea SCR DeNOx SystemsMoses DevaprasannaNo ratings yet
- Diesel Emissions in ReviewDocument15 pagesDiesel Emissions in ReviewMoses DevaprasannaNo ratings yet
- Urea-SCR System Optimization With Various Combinations of Mixer Types and Decomposition Pipe LengthsDocument2 pagesUrea-SCR System Optimization With Various Combinations of Mixer Types and Decomposition Pipe LengthsMoses DevaprasannaNo ratings yet
- Chevron Fuel ReportDocument96 pagesChevron Fuel ReportAndrew McCannNo ratings yet
- Propulsion 1 Two Q & ADocument5 pagesPropulsion 1 Two Q & AMoses DevaprasannaNo ratings yet
- AvionicsDocument57 pagesAvionicsMoses Devaprasanna100% (1)
- pc200 7 Main Pump Test MethodDocument26 pagespc200 7 Main Pump Test Methodalfred100% (1)
- Materi TM-300 28 Feb 2013Document26 pagesMateri TM-300 28 Feb 2013kharimulazizNo ratings yet
- CAMON C8 Rotavator PowerSafe DiagramDocument16 pagesCAMON C8 Rotavator PowerSafe DiagramDomNo ratings yet
- 1009 - Wind Loads On Duopitch Roof Building: DescriptionDocument7 pages1009 - Wind Loads On Duopitch Roof Building: DescriptionKris Lee100% (1)
- Actuator dimensions and specificationsDocument1 pageActuator dimensions and specificationsDaniel Camargo PérezNo ratings yet
- Ducato 290 Handbook 05-15 PDFDocument387 pagesDucato 290 Handbook 05-15 PDFDaniNo ratings yet
- PART-66 Training - Aircraft Maintenance LicenceDocument11 pagesPART-66 Training - Aircraft Maintenance LicenceFemi AgbanaNo ratings yet
- ANSYS-CFD Analysis of Condensation Process Occurring Inside High Efficiency BoilersDocument20 pagesANSYS-CFD Analysis of Condensation Process Occurring Inside High Efficiency Boilerskulov1592No ratings yet
- Principle of PhysicsDocument446 pagesPrinciple of PhysicsWendirad Beshada86% (7)
- Basics of Foundation Design PDFDocument433 pagesBasics of Foundation Design PDFGnkdsNo ratings yet
- Aermec FCL 32-124 Technical Manual EngDocument84 pagesAermec FCL 32-124 Technical Manual Enganon_281687165No ratings yet
- Salient Features:: Crawler DozerDocument4 pagesSalient Features:: Crawler DozerSAFE EARTHMOVERSNo ratings yet
- Sany 230C - Sy230c8c3kDocument268 pagesSany 230C - Sy230c8c3kLS Hidráulica ManilhaNo ratings yet
- AhadDocument88 pagesAhadAhmad NNo ratings yet
- Gravity Sewer Acceptance Testing Results Sheet: Sewer Pipeline Pressure TestDocument1 pageGravity Sewer Acceptance Testing Results Sheet: Sewer Pipeline Pressure TestLulouch Raiz100% (1)
- A Low-Cost, Open Source Wind TurbineDocument23 pagesA Low-Cost, Open Source Wind TurbineStephen LynchNo ratings yet
- 06 Instructions Manual Hagglunds Eximtec - CEI CollahuasiDocument261 pages06 Instructions Manual Hagglunds Eximtec - CEI CollahuasiJorge RiveraNo ratings yet
- Adjusting Max Displacement HPR-02Document3 pagesAdjusting Max Displacement HPR-02ArleyTrujillo1224No ratings yet
- Catalogo Motor Parker TC, TB, TE, TJ, TF, TG, TH, TLDocument56 pagesCatalogo Motor Parker TC, TB, TE, TJ, TF, TG, TH, TLg alves100% (1)
- How Carburetors Work: Understanding the Six Main SystemsDocument7 pagesHow Carburetors Work: Understanding the Six Main Systemssaithea25No ratings yet
- Vibration BookDocument152 pagesVibration Bookrez_babu7430No ratings yet
- Afs - 2002 GasunieDocument18 pagesAfs - 2002 Gasuniedoraq7975No ratings yet
- Vespa Old Lambretta Restoration Manual Reforma (English, Italian) PutamedaDocument94 pagesVespa Old Lambretta Restoration Manual Reforma (English, Italian) Putamedablancohcc100% (1)
- Catalog Echipamente de Gresat Si Transfer Ulei PressolDocument104 pagesCatalog Echipamente de Gresat Si Transfer Ulei PressolvalentinNo ratings yet
- 3-Element Drum LVL ControlDocument6 pages3-Element Drum LVL ControlNAYEEM100% (1)
- CAT 385CLRE ElectricalDocument17 pagesCAT 385CLRE ElectricalGeorge Zormpas100% (1)
- Rock Anchoring and Bolt Systems: - Rod Series - Anchors - Equipment - InstallationDocument40 pagesRock Anchoring and Bolt Systems: - Rod Series - Anchors - Equipment - InstallationTarekNo ratings yet