You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Temperature Monitoring: FaizanDocument5 pagesTemperature Monitoring: FaizankjfenNo ratings yet
- Water Treatments: Steam Water Cycle TreatmentDocument2 pagesWater Treatments: Steam Water Cycle TreatmentkjfenNo ratings yet
- 7SA522 CatalogueDocument53 pages7SA522 CataloguePhilip D'cruzNo ratings yet
- Selo 1Document26 pagesSelo 1kjfenNo ratings yet
- 7 Ways Signal Noise Can Impact Your Electrical EquipmentDocument5 pages7 Ways Signal Noise Can Impact Your Electrical EquipmentkjfenNo ratings yet
- Sub 131Document10 pagesSub 131kjfenNo ratings yet
- REG670Document88 pagesREG670Rafael Hoffmann PaludoNo ratings yet
- Timer Tutorials 555Document1 pageTimer Tutorials 555kjfenNo ratings yet
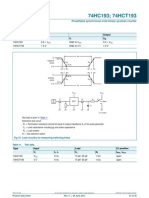
- 74HC193 74HCT193: NXP SemiconductorsDocument2 pages74HC193 74HCT193: NXP SemiconductorskjfenNo ratings yet
- Timer Tutorials 555Document1 pageTimer Tutorials 555kjfenNo ratings yet
- Timer Tutorials 555Document1 pageTimer Tutorials 555kjfenNo ratings yet
- Timer Tutorials 555Document1 pageTimer Tutorials 555kjfenNo ratings yet
- Degree of Electrifi Cation Peak Load of One Household (KW) Portion of Peak Load Per Household P (KW) Degree of Simultaneous Usage G RemarksDocument10 pagesDegree of Electrifi Cation Peak Load of One Household (KW) Portion of Peak Load Per Household P (KW) Degree of Simultaneous Usage G RemarkskjfenNo ratings yet
- Timer Tutorials 555Document1 pageTimer Tutorials 555kjfenNo ratings yet
- Timer Tutorials 555Document1 pageTimer Tutorials 555kjfenNo ratings yet
- 74HC193 74HCT193: 17. Contact InformationDocument2 pages74HC193 74HCT193: 17. Contact InformationkjfenNo ratings yet
- Timer Tutorials 555Document1 pageTimer Tutorials 555kjfenNo ratings yet
- 74HC193 74HCT193: 13. Package OutlineDocument2 pages74HC193 74HCT193: 13. Package OutlinekjfenNo ratings yet
- 74HC193 74HCT193: 14. AbbreviationsDocument2 pages74HC193 74HCT193: 14. AbbreviationskjfenNo ratings yet
- 74HC HCT193Document2 pages74HC HCT193kjfenNo ratings yet
- 74HC193 74HCT193: NXP SemiconductorsDocument2 pages74HC193 74HCT193: NXP SemiconductorskjfenNo ratings yet
- 74HC193 74HCT193: NXP SemiconductorsDocument2 pages74HC193 74HCT193: NXP SemiconductorskjfenNo ratings yet
- 74HC193 74HCT193: NXP SemiconductorsDocument2 pages74HC193 74HCT193: NXP SemiconductorskjfenNo ratings yet
- 74HC193 74HCT193: NXP SemiconductorsDocument2 pages74HC193 74HCT193: NXP SemiconductorskjfenNo ratings yet
- 74HC193 74HCT193: 5. Pinning InformationDocument2 pages74HC193 74HCT193: 5. Pinning InformationkjfenNo ratings yet
- 74HC193 74HCT193: 10. Dynamic CharacteristicsDocument2 pages74HC193 74HCT193: 10. Dynamic CharacteristicskjfenNo ratings yet
- 74HC193 74HCT193: 10. Dynamic CharacteristicsDocument2 pages74HC193 74HCT193: 10. Dynamic CharacteristicskjfenNo ratings yet
- 74HC193 74HCT193: NXP SemiconductorsDocument2 pages74HC193 74HCT193: NXP SemiconductorskjfenNo ratings yet
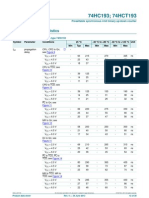
- 74HC193 74HCT193: 9. Static CharacteristicsDocument2 pages74HC193 74HCT193: 9. Static CharacteristicskjfenNo ratings yet
- 74HC193 74HCT193: NXP SemiconductorsDocument2 pages74HC193 74HCT193: NXP SemiconductorskjfenNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- NDR Jammer OverviewDocument1 pageNDR Jammer OverviewhardedcNo ratings yet
- Hino Wiring DiagramDocument382 pagesHino Wiring DiagramAqly Satyawan96% (70)
- M1205A-069 Enhanced Parts Replacement Tables 1Document17 pagesM1205A-069 Enhanced Parts Replacement Tables 1EDGAR CRUZ VINUEZANo ratings yet
- Frequency Ranges: H5: 518.000-542.000 MHZDocument5 pagesFrequency Ranges: H5: 518.000-542.000 MHZJNo ratings yet
- Decs 250Document12 pagesDecs 250Paulo LeiteNo ratings yet
- Lecture 2 - Modern Computer SystemsDocument44 pagesLecture 2 - Modern Computer SystemsKisarach PhilipsNo ratings yet
- Manual Service Mx5203ms 22Document1 pageManual Service Mx5203ms 22yudiw74No ratings yet
- Christopher Saint, Judy Saint-IC Mask Design - Essential Layout TechniquesDocument481 pagesChristopher Saint, Judy Saint-IC Mask Design - Essential Layout TechniquesPraveenNo ratings yet
- Speed Up Demanding Workloads, Save Admin Hassle, and Maximize Storage Capacity With A Dell EMC Isilon All-Flash Storage SystemDocument20 pagesSpeed Up Demanding Workloads, Save Admin Hassle, and Maximize Storage Capacity With A Dell EMC Isilon All-Flash Storage SystemPrincipled TechnologiesNo ratings yet
- монитор ЧБ Goldstar MBM-2105 PDFDocument13 pagesмонитор ЧБ Goldstar MBM-2105 PDFSergeyNo ratings yet
- Chapter 6 Microwave Resonators Chapter 6 Microwave ResonatorsDocument18 pagesChapter 6 Microwave Resonators Chapter 6 Microwave ResonatorsUsman QureshiNo ratings yet
- 15A04802 Low Power VLSI Circuits & SystemsDocument1 page15A04802 Low Power VLSI Circuits & SystemsMALLAVARAPU NARASAREDDYNo ratings yet
- Flexi WCDMA BTS and Module OverviewDocument52 pagesFlexi WCDMA BTS and Module OverviewLelik GhhNo ratings yet
- Instruction Code Instruction Code Instruction Code Instruction Code Instruction CodeDocument4 pagesInstruction Code Instruction Code Instruction Code Instruction Code Instruction Codesm_nictNo ratings yet
- Wide Swing Cascode Current MirrorDocument4 pagesWide Swing Cascode Current MirrorSunil M. PaiNo ratings yet
- Tutorial OverviewDocument44 pagesTutorial OverviewBharavi K SNo ratings yet
- Phy-Las Expert Pen PDFDocument2 pagesPhy-Las Expert Pen PDFRamdanMohamedNo ratings yet
- Homework v.1Document5 pagesHomework v.1RasedulIslam50% (2)
- MR758Document7 pagesMR758Bruno NascimentoNo ratings yet
- Sharp Lc32fh500e Lc32fb500e Lc32fh510e Lc32fb510e Lc-Fs510e SMDocument76 pagesSharp Lc32fh500e Lc32fb500e Lc32fh510e Lc32fb510e Lc-Fs510e SMDinca SilviuNo ratings yet
- KT 5198aDocument5 pagesKT 5198asrinu149No ratings yet
- 24 Electrical PowerDocument172 pages24 Electrical PowerNurlan CebrayilzadeNo ratings yet
- Simulation of Power Electronic Systems Using PSpice PDFDocument82 pagesSimulation of Power Electronic Systems Using PSpice PDFdimitaringNo ratings yet
- Itws Lab ManualDocument153 pagesItws Lab ManualchandrasekharlagadapatiNo ratings yet
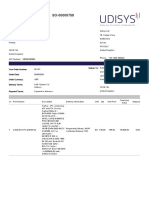
- Proforma Invoice - SO-00000758Document3 pagesProforma Invoice - SO-00000758daleNo ratings yet
- CTM-CEM10-20 Service Enac v02-2Document214 pagesCTM-CEM10-20 Service Enac v02-2mohammed100% (2)
- Stage 4 Technology Mandatory Digital Technologies: Crack The CodeDocument18 pagesStage 4 Technology Mandatory Digital Technologies: Crack The Codesnooze101No ratings yet
- Line Follower and Obstacle Avoidance Bot Using ArduinoDocument4 pagesLine Follower and Obstacle Avoidance Bot Using ArduinorahimNo ratings yet
- Ac200 Manual v1 0Document239 pagesAc200 Manual v1 0Juliana AndradeNo ratings yet
- Moving Coil GalvanometerDocument5 pagesMoving Coil GalvanometerAshok PradhanNo ratings yet