You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Temperature Monitoring: FaizanDocument5 pagesTemperature Monitoring: FaizankjfenNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Selo 1Document26 pagesSelo 1kjfenNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Water Treatments: Steam Water Cycle TreatmentDocument2 pagesWater Treatments: Steam Water Cycle TreatmentkjfenNo ratings yet
- Timer Tutorials 555Document1 pageTimer Tutorials 555kjfenNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Timer Tutorials 555Document1 pageTimer Tutorials 555kjfenNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Timer Tutorials 555Document1 pageTimer Tutorials 555kjfenNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Degree of Electrifi Cation Peak Load of One Household (KW) Portion of Peak Load Per Household P (KW) Degree of Simultaneous Usage G RemarksDocument10 pagesDegree of Electrifi Cation Peak Load of One Household (KW) Portion of Peak Load Per Household P (KW) Degree of Simultaneous Usage G RemarkskjfenNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
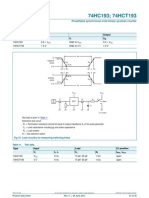
- 74HC193 74HCT193: NXP SemiconductorsDocument2 pages74HC193 74HCT193: NXP SemiconductorskjfenNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Timer Tutorials 555Document1 pageTimer Tutorials 555kjfenNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- 74HC193 74HCT193: 14. AbbreviationsDocument2 pages74HC193 74HCT193: 14. AbbreviationskjfenNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- 74HC193 74HCT193: NXP SemiconductorsDocument2 pages74HC193 74HCT193: NXP SemiconductorskjfenNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- 74HC193 74HCT193: 17. Contact InformationDocument2 pages74HC193 74HCT193: 17. Contact InformationkjfenNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Timer Tutorials 555Document1 pageTimer Tutorials 555kjfenNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- 74HC193 74HCT193: 13. Package OutlineDocument2 pages74HC193 74HCT193: 13. Package OutlinekjfenNo ratings yet
- 74HC193 74HCT193: NXP SemiconductorsDocument2 pages74HC193 74HCT193: NXP SemiconductorskjfenNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- 74HC193 74HCT193: NXP SemiconductorsDocument2 pages74HC193 74HCT193: NXP SemiconductorskjfenNo ratings yet
- 74HC193 74HCT193: 9. Static CharacteristicsDocument2 pages74HC193 74HCT193: 9. Static CharacteristicskjfenNo ratings yet
- 74HC193 74HCT193: NXP SemiconductorsDocument2 pages74HC193 74HCT193: NXP SemiconductorskjfenNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- 74HC193 74HCT193: NXP SemiconductorsDocument2 pages74HC193 74HCT193: NXP SemiconductorskjfenNo ratings yet
- 74HC193 74HCT193: 10. Dynamic CharacteristicsDocument2 pages74HC193 74HCT193: 10. Dynamic CharacteristicskjfenNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- 44 A Practical Guide To Geomantic Divination 45 The Presiding GeniusDocument1 page44 A Practical Guide To Geomantic Divination 45 The Presiding GeniuskjfenNo ratings yet
- Physical Dimensions: 14-Lead Plastic Dual-In-Line Package (PDIP), JEDEC MS-001, 0.300" Wide Package Number N14ADocument1 pagePhysical Dimensions: 14-Lead Plastic Dual-In-Line Package (PDIP), JEDEC MS-001, 0.300" Wide Package Number N14AkjfenNo ratings yet
- Function Tables Logic Diagram: BCD Count Sequence (Note 1) Outputs Q Q Q QDocument1 pageFunction Tables Logic Diagram: BCD Count Sequence (Note 1) Outputs Q Q Q QkjfenNo ratings yet
- Ac Switching Characteristics: 5vandtDocument1 pageAc Switching Characteristics: 5vandtkjfenNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- 74HC193 74HCT193: 5. Pinning InformationDocument2 pages74HC193 74HCT193: 5. Pinning InformationkjfenNo ratings yet
- Geomantic AstrologyDocument1 pageGeomantic AstrologykjfenNo ratings yet
- Absolute Maximum Ratings: Symbol Parameter Min Nom Max UnitsDocument1 pageAbsolute Maximum Ratings: Symbol Parameter Min Nom Max UnitskjfenNo ratings yet
- PHEVDocument77 pagesPHEVSyed SulaimanNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Notice: Solar America Initiative Solar America Showcases Technical Assistance OpportunityDocument2 pagesNotice: Solar America Initiative Solar America Showcases Technical Assistance OpportunityJustia.comNo ratings yet
- Towards Life-Cycle Assessment of Foundations of Guyed Towers in Electrical Transmission LinesDocument6 pagesTowards Life-Cycle Assessment of Foundations of Guyed Towers in Electrical Transmission LinesJesús Oziel MartínezNo ratings yet
- HIFREQ: An OverviewDocument7 pagesHIFREQ: An OverviewMohammad SeyediNo ratings yet
- Sibabrata DasDocument4 pagesSibabrata DasjaydiphajraNo ratings yet
- Chief Electrical Transmission OperatorDocument1 pageChief Electrical Transmission OperatorKarthikeya BandaruNo ratings yet
- SilDocument3 pagesSilSandipNanawareNo ratings yet
- Need of This ProjectDocument38 pagesNeed of This ProjectThomas BakerNo ratings yet
- Hydro Thermal Economic Dispatch With Renewable EnergyDocument75 pagesHydro Thermal Economic Dispatch With Renewable EnergyMohandRahimNo ratings yet
- What Is Electrostatic ShieldsDocument3 pagesWhat Is Electrostatic ShieldssujaraghupsNo ratings yet
- Hydropower Policy - A Critique: Ratna Sansar Shrestha, FCADocument6 pagesHydropower Policy - A Critique: Ratna Sansar Shrestha, FCAEr Umesh BhandariNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- 33 11 KV Substation Training ReportDocument37 pages33 11 KV Substation Training ReportApoorv SaxenaNo ratings yet
- GFZ65192EN02Document166 pagesGFZ65192EN02Alex CarmonaNo ratings yet
- Structural Safety Evaluation of The Inner Conductors in GIB (Gas Insulated Bus) Using Electromagnetic Structural Coupled AnalysisDocument1 pageStructural Safety Evaluation of The Inner Conductors in GIB (Gas Insulated Bus) Using Electromagnetic Structural Coupled Analysisventurer_2222No ratings yet
- Presentation of Cigre SC A2 Transformers'Document7 pagesPresentation of Cigre SC A2 Transformers'luis900000No ratings yet
- Physics QuestionDocument22 pagesPhysics QuestionAMBROSE ANAK JEROME MoeNo ratings yet
- Ayk Pvt. Ltd. Gepco: Customer: Contractor: Gepco Sinosteel China Head MaralaDocument4 pagesAyk Pvt. Ltd. Gepco: Customer: Contractor: Gepco Sinosteel China Head MaralaEngr Zia UR RehmanNo ratings yet
- Ep Cos PFC Pricelist 2017Document24 pagesEp Cos PFC Pricelist 2017devarshivaidyaNo ratings yet
- 33 KV SubstationDocument19 pages33 KV Substationraju chandanshiveNo ratings yet
- Consumer Service MannualDocument60 pagesConsumer Service MannualMus'ab FarouqNo ratings yet
- OplatDocument18 pagesOplatexekiel_77No ratings yet
- Brochure LR1RSDocument2 pagesBrochure LR1RSAli Rachman HakimNo ratings yet
- LehDocument3 pagesLehKB_mitNo ratings yet
- Scattergood-Olympic Fact Sheet 2018Document1 pageScattergood-Olympic Fact Sheet 2018Bob KernsNo ratings yet
- HDMI Cable Modeling and Analysis With TDR DataDocument9 pagesHDMI Cable Modeling and Analysis With TDR DataAmmar AbdullahNo ratings yet
- HW 3 2Document9 pagesHW 3 2noorNo ratings yet
- WP II Demand Forecast Report FINAL RevisionDocument139 pagesWP II Demand Forecast Report FINAL RevisionSalih Ahmed ObeidNo ratings yet
- 2023-TSO-UGM Topic4 MonitoringSystemForSubSynchronousOscillationsDocument37 pages2023-TSO-UGM Topic4 MonitoringSystemForSubSynchronousOscillationsbrunoscarpaNo ratings yet
- Subsynchronous OscillationDocument31 pagesSubsynchronous OscillationjyothirNo ratings yet
- Sivacon 8ps Li enDocument24 pagesSivacon 8ps Li enBalamurugan ArumugamNo ratings yet
- Chip War: The Fight for the World's Most Critical TechnologyFrom EverandChip War: The Fight for the World's Most Critical TechnologyRating: 4.5 out of 5 stars4.5/5 (82)
- Chip War: The Quest to Dominate the World's Most Critical TechnologyFrom EverandChip War: The Quest to Dominate the World's Most Critical TechnologyRating: 4.5 out of 5 stars4.5/5 (228)
- Cyber-Physical Systems: Foundations, Principles and ApplicationsFrom EverandCyber-Physical Systems: Foundations, Principles and ApplicationsHoubing H. SongNo ratings yet
- CompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002From EverandCompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002Rating: 5 out of 5 stars5/5 (1)
- iPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsFrom EverandiPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsRating: 5 out of 5 stars5/5 (3)