You might also like
- Esquema Eletrico S10 Carroceria Modulo GM 13526399Document15 pagesEsquema Eletrico S10 Carroceria Modulo GM 13526399rafaelNo ratings yet
- Modulo de Injeçao Ford FIC EEC4 MultipontoDocument38 pagesModulo de Injeçao Ford FIC EEC4 MultipontoRonald EduardoNo ratings yet
- Pinagem Ultimate Ecu Test Iaw 4avp 4afr 4cfrDocument10 pagesPinagem Ultimate Ecu Test Iaw 4avp 4afr 4cfrviniciusNo ratings yet
- Guia Rápido de Instalação do Módulo Injepro S3000Document20 pagesGuia Rápido de Instalação do Módulo Injepro S3000ticocrazyNo ratings yet
- Clamper PLUS evita detecção de anomalias em sensoresDocument3 pagesClamper PLUS evita detecção de anomalias em sensoresedersonsilvafacebookNo ratings yet
- Diagnóstico EEC-IV sem ScannerDocument7 pagesDiagnóstico EEC-IV sem ScannerEdson Pereira RodriguesNo ratings yet
- Bosch Motronic 2.8Document0 pagesBosch Motronic 2.8Mateus de AlmeidaNo ratings yet
- Pinagem Ultimate ECU Test Siemens Sirius 32Document6 pagesPinagem Ultimate ECU Test Siemens Sirius 32Japao MillerNo ratings yet
- Manual Rochester Multe C 70Document6 pagesManual Rochester Multe C 70jesuinobferreiraNo ratings yet
- Delphi Multec IEFI-6: guia completo sobre o sistema de injeção eletrônicaDocument29 pagesDelphi Multec IEFI-6: guia completo sobre o sistema de injeção eletrônicaEduardo RafaelNo ratings yet
- ECU SimuladorDocument6 pagesECU SimuladorRoberto TecNo ratings yet
- Lista de Falhas - Airbag Autoliv-4Document57 pagesLista de Falhas - Airbag Autoliv-4Adriel Maia Do AmaralNo ratings yet
- Como ligar sensor TPS de 3 pinos sem esquemaDocument1 pageComo ligar sensor TPS de 3 pinos sem esquemaJoao Silva LopesNo ratings yet
- Palio-Siena Iaw 1g7Document4 pagesPalio-Siena Iaw 1g7Fabio JuniorNo ratings yet
- Sirius 32E Renault ClioDocument1 pageSirius 32E Renault ClioVANDECONo ratings yet
- Problemas com injeção eletrônica da PalioDocument5 pagesProblemas com injeção eletrônica da Paliorebrum1No ratings yet
- Otimizando o desempenho do motor com variador de avanço T38plusDocument3 pagesOtimizando o desempenho do motor com variador de avanço T38plusdeive.limaNo ratings yet
- Conexão da FT250 FT300 FT350 e FT400 em VW Mi<07/98 e >07/98Document1 pageConexão da FT250 FT300 FT350 e FT400 em VW Mi<07/98 e >07/98Claudiney Silva100% (1)
- Modulo Arrefecimento AstraDocument2 pagesModulo Arrefecimento AstraJunior MatosNo ratings yet
- Capitulo 11 - Aplicativos Renault - Siemens Fenix 5Document28 pagesCapitulo 11 - Aplicativos Renault - Siemens Fenix 5Victor SanchezNo ratings yet
- KA 076 ManualDocument2 pagesKA 076 ManualReinaldo ScianoNo ratings yet
- Esquema Elétrico - Gol G1 - Climatizador PDFDocument3 pagesEsquema Elétrico - Gol G1 - Climatizador PDFEdergf Gomes FerreiraNo ratings yet
- 035 08 - Fiat Stilo - Instalacao Do Alarme PST Com Acionamento de Vidros e Travas EletricasDocument5 pages035 08 - Fiat Stilo - Instalacao Do Alarme PST Com Acionamento de Vidros e Travas EletricasAlex AavNo ratings yet
- Marelli 1avbDocument3 pagesMarelli 1avbAlexandre Medeiros100% (1)
- Gm-Blazer 2.2 Mpfi 1Document1 pageGm-Blazer 2.2 Mpfi 1Mariel SosaNo ratings yet
- Sensor de Pressão Absoluta No Coletor de Admissão - MAP PDFDocument9 pagesSensor de Pressão Absoluta No Coletor de Admissão - MAP PDFNunesScribd87No ratings yet
- Posicionamento de relés, fusíveis e conectores em veículoDocument18 pagesPosicionamento de relés, fusíveis e conectores em veículoremerson45No ratings yet
- Aplicativo PeugeotDocument9 pagesAplicativo PeugeotgatoliNo ratings yet
- Sonic Ar Condicionado - Pinout Do Conector X3 Do Módulo de Controle Do AC PDFDocument2 pagesSonic Ar Condicionado - Pinout Do Conector X3 Do Módulo de Controle Do AC PDFWiterMarcosNo ratings yet
- Diagrama Esquemático Fiação Externa V5 NEWDocument1 pageDiagrama Esquemático Fiação Externa V5 NEWAlexandre Gandra CarvalhoNo ratings yet
- Manual Multec 700 DashboardDocument29 pagesManual Multec 700 DashboardRicardo BastosNo ratings yet
- Delphi Multec-6 em GM Corsa, Omega, S10 e BlazerDocument28 pagesDelphi Multec-6 em GM Corsa, Omega, S10 e BlazerMiguel Da Costa100% (1)
- Pedido Agosto 2019Document9 pagesPedido Agosto 2019Christiam OrtegaNo ratings yet
- Injeção Eletronica VectraDocument24 pagesInjeção Eletronica VectraAnderson SantosNo ratings yet
- Instalar Um Contagiros CeltaDocument13 pagesInstalar Um Contagiros CeltaRenan Oliveira100% (1)
- Manual de portugues (K5-9100葡萄牙语)Document6 pagesManual de portugues (K5-9100葡萄牙语)Michel Fernandes HndNo ratings yet
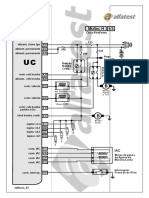
- Corsa B 1.4 AlfatesDocument1 pageCorsa B 1.4 AlfatesErick DavidNo ratings yet
- Códigos de Defeito: Montadora Sistema Nome GM Imobilizador GM Imob 4Document4 pagesCódigos de Defeito: Montadora Sistema Nome GM Imobilizador GM Imob 4gustavo silvaNo ratings yet
- Alarme FrontierDocument9 pagesAlarme FrontierWelleyNo ratings yet
- Sensores do Corsa 1.0 FlexDocument11 pagesSensores do Corsa 1.0 FlexantoniomecptNo ratings yet
- MODULO X TESTE V4 INJECAO CORSA 1.0 1.6 16VDocument1 pageMODULO X TESTE V4 INJECAO CORSA 1.0 1.6 16VRene De OliveiraNo ratings yet
- Sensor e sistema de injeção do FIAT Doblo e Palio 1.3LDocument1 pageSensor e sistema de injeção do FIAT Doblo e Palio 1.3LDaniel Daloco100% (1)
- Esquema elétrico do sistema Bosch ME7.5.10 gasolinaDocument5 pagesEsquema elétrico do sistema Bosch ME7.5.10 gasolinaGabriel SouzaNo ratings yet
- Scanner - EEC IV - Ranger e ExplorerDocument18 pagesScanner - EEC IV - Ranger e ExplorerDaniel Sanguiné100% (2)
- MONOPONTODocument23 pagesMONOPONTOCelso100% (1)
- Multec H 1/3: Kaptor Box - Esquema Elétrico Marca: GM - MONTANA 1.8 Sistema: Multec H (Flexpower) Versão ArquivoDocument1 pageMultec H 1/3: Kaptor Box - Esquema Elétrico Marca: GM - MONTANA 1.8 Sistema: Multec H (Flexpower) Versão Arquivonavegador configuracionNo ratings yet
- Diagnóstico veicular PC-SCANDocument124 pagesDiagnóstico veicular PC-SCANNocorte Custom PerformanceNo ratings yet
- ECU.TEST 2 - Evolução do Sistema de Controle EletrônicoDocument2 pagesECU.TEST 2 - Evolução do Sistema de Controle EletrônicoDaniele Da Silva Dos SantosNo ratings yet
- Manual instalação condicionador sonda lambdaDocument2 pagesManual instalação condicionador sonda lambdavagnerNo ratings yet
- Sagem s2000 Peugeot 206 1.4Document3 pagesSagem s2000 Peugeot 206 1.4riveradeisi54No ratings yet
- Como funciona o sistema de injeção GM Delphi Multec-SDocument23 pagesComo funciona o sistema de injeção GM Delphi Multec-SJulio VivianNo ratings yet
- Treinamento Injeção AsproDocument40 pagesTreinamento Injeção Asprolucineiamelo100% (1)
- Manual Painel GOL GT G1Document11 pagesManual Painel GOL GT G1Fábio Fiorio100% (1)
- Diagnóstico do ABS/ASR Teves 04 no VW Passat 2.8 VR6Document33 pagesDiagnóstico do ABS/ASR Teves 04 no VW Passat 2.8 VR6Giovanna ValenteNo ratings yet
- Capitulo 68 Polo ClassicDocument20 pagesCapitulo 68 Polo ClassicDanielNo ratings yet
- Códigos de defeito Monza EFIDocument1 pageCódigos de defeito Monza EFIyuri martins do nascimento100% (1)
- 1apresentaoqlikview 140320144033 Phpapp01Document83 pages1apresentaoqlikview 140320144033 Phpapp01Hudson MartinsNo ratings yet
- A Melhoria Do Fluxo de Informações Entre Planejamento e Controle de Produção e Os Processos de FabricaçãoDocument10 pagesA Melhoria Do Fluxo de Informações Entre Planejamento e Controle de Produção e Os Processos de FabricaçãoHudson MartinsNo ratings yet
- Treinamento Qlik Sense: Análises de InformaçõesDocument60 pagesTreinamento Qlik Sense: Análises de InformaçõesHudson Martins100% (1)
- Intro Duca o A Olean Construction Blo QDocument88 pagesIntro Duca o A Olean Construction Blo QHudson MartinsNo ratings yet
- DashboardDocument17 pagesDashboardHudson MartinsNo ratings yet
- MOMAG Artigo Hudson 2010 05 13Document3 pagesMOMAG Artigo Hudson 2010 05 13Hudson MartinsNo ratings yet
- Construa dashboards para gestãoDocument19 pagesConstrua dashboards para gestãoSam KemmerNo ratings yet
- DashboardDocument17 pagesDashboardHudson MartinsNo ratings yet
- Construa dashboards para gestãoDocument19 pagesConstrua dashboards para gestãoSam KemmerNo ratings yet
- Business Agility Survival GuideDocument9 pagesBusiness Agility Survival GuideHudson MartinsNo ratings yet
- Módulo 2 PDFDocument21 pagesMódulo 2 PDFHudson MartinsNo ratings yet
- Apresentação Do Curso PDFDocument9 pagesApresentação Do Curso PDFThiago SiscomNo ratings yet
- Curso Python e Django - Aula 3-1Document10 pagesCurso Python e Django - Aula 3-1Hudson MartinsNo ratings yet
- Policia Civil RsDocument848 pagesPolicia Civil RsHudson MartinsNo ratings yet
- 166 Questões Da VUNESP de Informática - ComentadasDocument0 pages166 Questões Da VUNESP de Informática - ComentadasVinicius Vitor100% (2)
- 1001 QUESTÕES DE CONCURSO - INFORMÁTICA - FCC - 2012Document32 pages1001 QUESTÕES DE CONCURSO - INFORMÁTICA - FCC - 2012Dione Silva100% (1)
- Tutorial Personalizar o Título Tela de Fundo e Legenda Da VisualizaçãoDocument5 pagesTutorial Personalizar o Título Tela de Fundo e Legenda Da VisualizaçãoHudson MartinsNo ratings yet
- Aulas 07 e 08 - Conceitos de RedeDocument18 pagesAulas 07 e 08 - Conceitos de RedeHudson MartinsNo ratings yet
- Tutorial Gráficos de Medidor Radial No Power BIDocument6 pagesTutorial Gráficos de Medidor Radial No Power BIHudson MartinsNo ratings yet
- Tutorial Gráfico de Combinação No Power BIDocument6 pagesTutorial Gráfico de Combinação No Power BIHudson MartinsNo ratings yet
- Testes Generativos 161014125801 PDFDocument30 pagesTestes Generativos 161014125801 PDFHudson MartinsNo ratings yet
- Colunas calculadas no Power BIDocument2 pagesColunas calculadas no Power BIHudson MartinsNo ratings yet
- Nubank Presentation 150723003110 Lva1 App6891Document36 pagesNubank Presentation 150723003110 Lva1 App6891Hudson MartinsNo ratings yet
- Modelagem dimensional de data warehouseDocument3 pagesModelagem dimensional de data warehouseHudson MartinsNo ratings yet
- Lucaseluiz 170502190657Document36 pagesLucaseluiz 170502190657Hudson MartinsNo ratings yet
- Umpassoalemdaimplantacaodobi 120919121554 Phpapp02Document26 pagesUmpassoalemdaimplantacaodobi 120919121554 Phpapp02Hudson MartinsNo ratings yet
- Tarefas Comuns de Consulta No Power BI DesktopDocument18 pagesTarefas Comuns de Consulta No Power BI DesktopHudson MartinsNo ratings yet
- Testes Generativos 161014125801Document30 pagesTestes Generativos 161014125801Hudson MartinsNo ratings yet
- Datomic 150723212721 Lva1 App6891Document93 pagesDatomic 150723212721 Lva1 App6891Hudson MartinsNo ratings yet
- Palestrametodologiabipentahoday 150518173206 Lva1 App6891Document33 pagesPalestrametodologiabipentahoday 150518173206 Lva1 App6891Hudson MartinsNo ratings yet
- Matemática - Trigonometria, Geometria, Sucessões e FunçõesDocument4 pagesMatemática - Trigonometria, Geometria, Sucessões e FunçõesLara SantosNo ratings yet
- Manual Bomba Frigostrella BZM Com Capa - Ed 2020 - (09-03-2020) PDFDocument35 pagesManual Bomba Frigostrella BZM Com Capa - Ed 2020 - (09-03-2020) PDFDanilo Magalhães100% (1)
- Formulário de anotações para prova de Concreto Armado IDocument12 pagesFormulário de anotações para prova de Concreto Armado IGustavo CampestriniNo ratings yet
- Introdução à Economia: Exercícios de Demanda, Oferta e EquilíbrioDocument3 pagesIntrodução à Economia: Exercícios de Demanda, Oferta e EquilíbrioGuilherme Santos0% (1)
- Instalação mecânica e elétrica do controlador P501Document2 pagesInstalação mecânica e elétrica do controlador P501christian.kojiNo ratings yet
- Calcular o Ângulo Formado Por Uma Cobertura Com A Horizontal. Rumos e AzimutesDocument60 pagesCalcular o Ângulo Formado Por Uma Cobertura Com A Horizontal. Rumos e AzimutesvirgilioNo ratings yet
- Edital 042 - 2018 Aviso 065 - 2018 Categorias Especiais de Matrícula 2018.2Document53 pagesEdital 042 - 2018 Aviso 065 - 2018 Categorias Especiais de Matrícula 2018.2Raphael Rodrigues Vieira FilhoNo ratings yet
- Exercícios de física sobre movimento uniforme e variadoDocument2 pagesExercícios de física sobre movimento uniforme e variadolivialshNo ratings yet
- Equações do 1o GrauDocument6 pagesEquações do 1o GrauPaulo Rogério Mancino100% (1)
- Manual Do DocenteDocument171 pagesManual Do Docentezelito atumane saideNo ratings yet
- Vulcão Taal ativo nas FilipinasDocument8 pagesVulcão Taal ativo nas FilipinasAna Filipa Fernandes FigueiredoNo ratings yet
- Norma Rosca Abnt Iso 7Document10 pagesNorma Rosca Abnt Iso 7Valdimar CorreiaNo ratings yet
- Análise da qualidade do ar em centro cirúrgico hospitalarDocument10 pagesAnálise da qualidade do ar em centro cirúrgico hospitalarfrancinellimfNo ratings yet
- Estatística Aplicada I - Títulos de QuestõesDocument12 pagesEstatística Aplicada I - Títulos de QuestõesGabriel Augusto JM100% (1)
- Produção de Mudas de ParicáDocument13 pagesProdução de Mudas de ParicáFernanda SoaresNo ratings yet
- Desenhos Tradicionais Na Areia em Angola e Seus Possíveis Usos Na AulaDocument18 pagesDesenhos Tradicionais Na Areia em Angola e Seus Possíveis Usos Na AulaAlan ManoelNo ratings yet
- Termodinâmica conceitos fundamentaisDocument24 pagesTermodinâmica conceitos fundamentaisMaria Gabriele DareNo ratings yet
- Translocação e inserção de proteínas no REDocument7 pagesTranslocação e inserção de proteínas no REJoséNo ratings yet
- A Geometria Sagrada na NaturezaDocument3 pagesA Geometria Sagrada na NaturezaLucianaNo ratings yet
- Modulação Digital e AnalógicaDocument35 pagesModulação Digital e AnalógicaAlberto HertzNo ratings yet
- PPQ Cap4 Atualizado 2Document43 pagesPPQ Cap4 Atualizado 2André CasimiroNo ratings yet
- Resumo Dos Resultados Da Argamassa Thermo XDocument6 pagesResumo Dos Resultados Da Argamassa Thermo XRaul BrandãoNo ratings yet
- LIMA, L. Estatística Aplicada. PECEGEDocument81 pagesLIMA, L. Estatística Aplicada. PECEGEthiduarte14No ratings yet
- Simbolismo Junguiano e Os Quatro Elementos Da AstrologiaDocument8 pagesSimbolismo Junguiano e Os Quatro Elementos Da AstrologiaRaQuel QueirozNo ratings yet
- Lista de Trigonometria - Arcos e Ângulos - GABARITODocument8 pagesLista de Trigonometria - Arcos e Ângulos - GABARITOThalyta ChavesNo ratings yet
- Procedimento de Determinação Da Condutividade ElétricaDocument10 pagesProcedimento de Determinação Da Condutividade ElétricaJarbas Rodrigues ChavesNo ratings yet
- Ensaio de PermeabilidadeDocument8 pagesEnsaio de PermeabilidadeIsabella C. Braido Do NascimentoNo ratings yet
- Avaliação 4 CalculoDocument6 pagesAvaliação 4 CalculoMaritania AlmeidaNo ratings yet
- Tecnologia de produtos cárneos: processamento e conservaçãoDocument99 pagesTecnologia de produtos cárneos: processamento e conservaçãoJanaina Sousa100% (2)
- ENG - 0002 - Informacao - Tecnica - DTE - DTP 1 PDFDocument33 pagesENG - 0002 - Informacao - Tecnica - DTE - DTP 1 PDFAntenógenesNo ratings yet