You might also like
- Steady State Analysis of PMSG PDFDocument16 pagesSteady State Analysis of PMSG PDF1balamanianNo ratings yet
- Control The Flywheel Storage System by Fuzzy Logic Associated With The Wind GeneratorDocument7 pagesControl The Flywheel Storage System by Fuzzy Logic Associated With The Wind GeneratorhassenbbNo ratings yet
- Ref For ANFISDocument21 pagesRef For ANFISTheodore Teddy JNo ratings yet
- Continuous Variable Speed Wind Turbine: Transmission Concept and Robust ControlDocument17 pagesContinuous Variable Speed Wind Turbine: Transmission Concept and Robust ControlDork654651No ratings yet
- Sliding Mode Controls of Active and Reactive Power of A DFIG With MPPT For Variable Speed Wind Energy ConversionDocument13 pagesSliding Mode Controls of Active and Reactive Power of A DFIG With MPPT For Variable Speed Wind Energy ConversionelecnaimelecNo ratings yet
- Steady State Analysis of Wind TurbineDocument7 pagesSteady State Analysis of Wind TurbineKhy-khy PutraNo ratings yet
- APPLICATION OF MATRIX CONVERTER IN WIND PMSGDocument8 pagesAPPLICATION OF MATRIX CONVERTER IN WIND PMSGChetan GhatageNo ratings yet
- A Fuzzy-Logic Based MPPT Method For Stand-Alone Wind Turbine SystemDocument8 pagesA Fuzzy-Logic Based MPPT Method For Stand-Alone Wind Turbine SystemAJER JOURNALNo ratings yet
- PSCAD Based Dynamic ModelingDocument7 pagesPSCAD Based Dynamic ModelingLalith KrishnanNo ratings yet
- A Novel Control Strategy of Power Converter Used To Direct Driven Permanent Magnet Wind Power Generation SystemDocument4 pagesA Novel Control Strategy of Power Converter Used To Direct Driven Permanent Magnet Wind Power Generation Systemjamal64722111No ratings yet
- Volume (8) Issue (4) 493-507Document15 pagesVolume (8) Issue (4) 493-507Seid BegovicNo ratings yet
- Jjmie: Modeling and Optimization of Wind Turbine Driving Permanent Magnet Synchronous GeneratorDocument6 pagesJjmie: Modeling and Optimization of Wind Turbine Driving Permanent Magnet Synchronous GeneratorhassenbbNo ratings yet
- 5 Modeling and Control of Variable Speed Wind Turbine Drive System DynamicsDocument11 pages5 Modeling and Control of Variable Speed Wind Turbine Drive System DynamicsnguyenngocbanNo ratings yet
- Hybrid Wind Diesel Energy System Using Matlab Simulation: ISO 9001:2008 CertifiedDocument9 pagesHybrid Wind Diesel Energy System Using Matlab Simulation: ISO 9001:2008 Certifiedsatya_vanapalli3422No ratings yet
- Power and Energy Analysis of Commercial Small Wind Turbine SystemsDocument6 pagesPower and Energy Analysis of Commercial Small Wind Turbine SystemsKamal DrawilNo ratings yet
- Electrical Braking of Large Wind TurbinesDocument11 pagesElectrical Braking of Large Wind Turbineslaaloo41No ratings yet
- Power Maximization Control of Small Wind System Using Permanent Magnet Synchronous GeneratorDocument13 pagesPower Maximization Control of Small Wind System Using Permanent Magnet Synchronous GeneratorhassenbbNo ratings yet
- Volume8Issue4493 507Document16 pagesVolume8Issue4493 507Mark FordNo ratings yet
- Performance Enhancement of Grid Connected Wind Energy Conversion SystemsDocument6 pagesPerformance Enhancement of Grid Connected Wind Energy Conversion Systemskanda71No ratings yet
- Design and Modeling of Wind Energy Conversion System Based On PMSG Using MPPT TechniqueDocument5 pagesDesign and Modeling of Wind Energy Conversion System Based On PMSG Using MPPT TechniqueijsretNo ratings yet
- Simulation of Directly Grid-Connected Wind Turbines For Voltage Fluctuation EvaluationDocument16 pagesSimulation of Directly Grid-Connected Wind Turbines For Voltage Fluctuation EvaluationGiovanni BoscoloNo ratings yet
- Influence of The Variable-Speed Wind Generators in Transient Stability Margin of The Conventional Generators Integrated in Electrical GridsDocument10 pagesInfluence of The Variable-Speed Wind Generators in Transient Stability Margin of The Conventional Generators Integrated in Electrical GridsMohamed TalebNo ratings yet
- Vertical Axis Wind Turbine ImprovementDocument11 pagesVertical Axis Wind Turbine Improvementahmad rosyidNo ratings yet
- Modelling and Simulation of Grid Connected Wind Energy SystemDocument5 pagesModelling and Simulation of Grid Connected Wind Energy SystemNadia BnNo ratings yet
- Incremental Conductance Technique For A Hybrid Wind - Solar Energy SystemDocument4 pagesIncremental Conductance Technique For A Hybrid Wind - Solar Energy SystemHanumante AkshayNo ratings yet
- Power Executive Approach For Hybrid System by Using FUZZY Based MPPT TechniqueDocument9 pagesPower Executive Approach For Hybrid System by Using FUZZY Based MPPT TechniqueDurgaprasad RagoluNo ratings yet
- Speed Control of Induction Motor Fed From Wind Turbine Via Particle Swarm Optimization Based PI ControllerDocument13 pagesSpeed Control of Induction Motor Fed From Wind Turbine Via Particle Swarm Optimization Based PI ControllerHanan MouchtakiriNo ratings yet
- Modelling and Controlof A Wind Turbine Using PermaDocument8 pagesModelling and Controlof A Wind Turbine Using PermaALEJANDRO JOSE VARGAS OPORTONo ratings yet
- An Improved Efficiency of Fuzzy Sliding Mode Cont PDFDocument5 pagesAn Improved Efficiency of Fuzzy Sliding Mode Cont PDFNoureddine BounaslaNo ratings yet
- Controller Design For DFIG Driven by Variable Speed Wind Turbine Using Static Output Feedback TechniqueDocument6 pagesController Design For DFIG Driven by Variable Speed Wind Turbine Using Static Output Feedback TechniqueAnandDuraiNo ratings yet
- 10.1007@s13198 018 0734 9Document11 pages10.1007@s13198 018 0734 9hamza mesaiNo ratings yet
- PMSG ModelingDocument6 pagesPMSG Modelingوليد ابو شاكرNo ratings yet
- Bog HoseDocument29 pagesBog HoseNadia BnNo ratings yet
- Transient Analysis and Modeling of Wind Generator During Power and Grid Voltage DropDocument8 pagesTransient Analysis and Modeling of Wind Generator During Power and Grid Voltage DropIAEME PublicationNo ratings yet
- Mathematical Modelling of Wind Turbine in A Wind Energy Conversion System: Power Coe Cient AnalysisDocument10 pagesMathematical Modelling of Wind Turbine in A Wind Energy Conversion System: Power Coe Cient AnalysisJose Antonio GdNo ratings yet
- Modeling and Simulation of Dfig To Grid Connected Wind Power Generation Using MatlabDocument12 pagesModeling and Simulation of Dfig To Grid Connected Wind Power Generation Using MatlabIAEME PublicationNo ratings yet
- (Engineering) - Electrical Power and Energy Systems 1999-21 - Dynamics of Diesel and Wind Turbine Generators On An Isolated PowerDocument7 pages(Engineering) - Electrical Power and Energy Systems 1999-21 - Dynamics of Diesel and Wind Turbine Generators On An Isolated PowerjfriquelmeNo ratings yet
- Benzen-2008-IEEE-ICSET Z-Source Inverter Based Wind Power Generation PDFDocument5 pagesBenzen-2008-IEEE-ICSET Z-Source Inverter Based Wind Power Generation PDFAnoop MathewNo ratings yet
- Intelligent Control A Class Wind Energy Conversion Systems: Chedid, F. Mrad, M. BasmaDocument8 pagesIntelligent Control A Class Wind Energy Conversion Systems: Chedid, F. Mrad, M. Basmamusaad1No ratings yet
- Group 20 EEE 2K16Document37 pagesGroup 20 EEE 2K16MIGHTY RAJUNo ratings yet
- Application Research of Maximum Wind-Energy Tracing Controller Based Adaptive Control Strategy in WECSDocument5 pagesApplication Research of Maximum Wind-Energy Tracing Controller Based Adaptive Control Strategy in WECSEngr Tahir Iqbal AwanNo ratings yet
- Control Design and Performance Analysis of A 6 MW Wind Turbine GeneratorDocument8 pagesControl Design and Performance Analysis of A 6 MW Wind Turbine Generatoroat_sohoNo ratings yet
- Impact of The Design Method of Permanent Magnets Synchronous Generators For Small Direct Drive Wind Turbines For Battery OperationDocument5 pagesImpact of The Design Method of Permanent Magnets Synchronous Generators For Small Direct Drive Wind Turbines For Battery OperationhassenbbNo ratings yet
- Dynamic Modeling, Design and Simulation of A Wind/fuel Cell/ultra-Capacitor-Based Hybrid Power Generation SystemDocument16 pagesDynamic Modeling, Design and Simulation of A Wind/fuel Cell/ultra-Capacitor-Based Hybrid Power Generation SystemKamal SharmaNo ratings yet
- Modeling and Simulation of Windgenerator With Fixed Speed Wind Turbine Under Matlab SimulinkDocument8 pagesModeling and Simulation of Windgenerator With Fixed Speed Wind Turbine Under Matlab SimulinkOrnella Mieles WrightNo ratings yet
- Modeling and Control of Direct Drive Variable Speed Stand-Alone Wind Energy Conversion SystemsDocument6 pagesModeling and Control of Direct Drive Variable Speed Stand-Alone Wind Energy Conversion SystemsSamundra GurungNo ratings yet
- Print PDFDocument15 pagesPrint PDFSachin AngadiNo ratings yet
- Assessment of Flicker Emission in A Grid Connected Wind FarmsDocument12 pagesAssessment of Flicker Emission in A Grid Connected Wind FarmspetraschukmNo ratings yet
- Adrc - PMSG - Good2Document6 pagesAdrc - PMSG - Good2Dileep VarmaNo ratings yet
- (Ajay Singh) Review On Control Techniques For VSWT NewDocument6 pages(Ajay Singh) Review On Control Techniques For VSWT NewAjay SinghNo ratings yet
- Grid Connection Control and Simulation of PMSG Wind Power System Based On Three Level NPC ConverterDocument8 pagesGrid Connection Control and Simulation of PMSG Wind Power System Based On Three Level NPC ConverterSEP-PublisherNo ratings yet
- Research Article: Modelling of A PMSG Wind Turbine With Autonomous ControlDocument10 pagesResearch Article: Modelling of A PMSG Wind Turbine With Autonomous ControlHoa NguyenNo ratings yet
- A Study of MPPT Schemes in PMSG Based Wind Turbine System: Joydeep Sarkar Prof. Shridhar S KhuleDocument6 pagesA Study of MPPT Schemes in PMSG Based Wind Turbine System: Joydeep Sarkar Prof. Shridhar S KhuleKhiem NguyenNo ratings yet
- Technologies For Power Generation From WindDocument4 pagesTechnologies For Power Generation From WindSEP-PublisherNo ratings yet
- 14.dynamic Modeling, Design and Simulation of A Windfuel Cellultracapacitor-Based Hybrid Power GeDocument16 pages14.dynamic Modeling, Design and Simulation of A Windfuel Cellultracapacitor-Based Hybrid Power GeYellaturi Siva Kishore ReddyNo ratings yet
- Doubly-Fed Wind Turbine Mathematical Model and Simulation: 2014 International Symposium On Computer, Consumer and ControlDocument3 pagesDoubly-Fed Wind Turbine Mathematical Model and Simulation: 2014 International Symposium On Computer, Consumer and ControlSandeepKumarNo ratings yet
- Watts 3 w AU p ρC 2 1 m PDocument7 pagesWatts 3 w AU p ρC 2 1 m PAbhishek SinghNo ratings yet
- Air-Core Inductive Current Sensor For Fast Transients Measurements in Distribution NetworksDocument4 pagesAir-Core Inductive Current Sensor For Fast Transients Measurements in Distribution NetworksJoniNo ratings yet
- Doubly Fed Induction Generator and Conventional Synchronous Generator BasedDocument5 pagesDoubly Fed Induction Generator and Conventional Synchronous Generator BasedJoniNo ratings yet
- (Energia Eolica) - Generators & Power Electronics For Wind TurbinesDocument108 pages(Energia Eolica) - Generators & Power Electronics For Wind TurbinesSese JejeNo ratings yet
- 30busload DataDocument1 page30busload DataJoniNo ratings yet
- Hamonics UoWDocument10 pagesHamonics UoWmv1970No ratings yet
- Co-Simulation of Back-To-Back VSC Transmission SystemDocument95 pagesCo-Simulation of Back-To-Back VSC Transmission SystemJoniNo ratings yet
- Fault Analysis of An Unbalanced Distribution System With Distributed GenerationDocument79 pagesFault Analysis of An Unbalanced Distribution System With Distributed GenerationJoniNo ratings yet
- Direct Driven Permanent Magnet Synchronous Generators With Diode Rectifiers For Use in Offshore Wind FarmsDocument120 pagesDirect Driven Permanent Magnet Synchronous Generators With Diode Rectifiers For Use in Offshore Wind FarmsJoniNo ratings yet
- Impact On Wind Turbine Systems From Transient Fluctuations in Offshore Utility GridsDocument118 pagesImpact On Wind Turbine Systems From Transient Fluctuations in Offshore Utility GridsJoniNo ratings yet
- Power Quality of Wind TurbiansDocument214 pagesPower Quality of Wind TurbiansMahebob JilanNo ratings yet
- Current Control Techniques For Three-Phase Voltage-Source PWM ConvertersDocument13 pagesCurrent Control Techniques For Three-Phase Voltage-Source PWM Convertersedvin_s667100% (1)
- Pscad Emtdc Based Simulation of Double Fedinduction Generator For Wind TurbinesDocument13 pagesPscad Emtdc Based Simulation of Double Fedinduction Generator For Wind TurbinesNguyen Mau CuongNo ratings yet
- PSCAD Modeling of One-Cycle Control VARDocument54 pagesPSCAD Modeling of One-Cycle Control VARJoniNo ratings yet
- Applications of PSCADDocument18 pagesApplications of PSCADAdam Moody100% (1)
- Applications of PSCADDocument18 pagesApplications of PSCADAdam Moody100% (1)
- Transmission Options For Offshore Wind Farms in The USDocument12 pagesTransmission Options For Offshore Wind Farms in The USJoniNo ratings yet
- Grounding TransformersDocument4 pagesGrounding TransformersJoniNo ratings yet
- Grounding TransformerDocument8 pagesGrounding TransformerJoniNo ratings yet
- Generator Grid Connection GuideDocument46 pagesGenerator Grid Connection GuideJim Watts100% (1)
- Fast Harmonic Simulation Methid For The Analysis of Network Losses With Converter-Connected Distributed GenerationDocument9 pagesFast Harmonic Simulation Methid For The Analysis of Network Losses With Converter-Connected Distributed GenerationJoniNo ratings yet
- Fault Behavior of Wind TurbinesDocument152 pagesFault Behavior of Wind TurbinesJoniNo ratings yet
- Short-Cut Desing of Wind FarmsDocument12 pagesShort-Cut Desing of Wind FarmsJoniNo ratings yet
- Windfarm EarthingDocument4 pagesWindfarm EarthingJoniNo ratings yet
- Electrical Systems For Offshore Wind FarmsDocument9 pagesElectrical Systems For Offshore Wind FarmsJoniNo ratings yet
- Neutral Grounding in Wind Farms GridsDocument1 pageNeutral Grounding in Wind Farms GridsJoniNo ratings yet
- Lab Report: Faculty of Science & Mathematics Universiti Pendidikan Sultan IdrisDocument6 pagesLab Report: Faculty of Science & Mathematics Universiti Pendidikan Sultan IdrisNisha Lauren VishvanathNo ratings yet
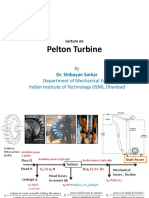
- Pelton Turbine: Department of Mechanical Engg Indian Institute of Technology (ISM), DhanbadDocument8 pagesPelton Turbine: Department of Mechanical Engg Indian Institute of Technology (ISM), DhanbadRajesh ShuklaNo ratings yet
- R7410402 Electronic Measurements & InstrumentationDocument4 pagesR7410402 Electronic Measurements & InstrumentationsivabharathamurthyNo ratings yet
- LLG FaultDocument8 pagesLLG Faultranjish_007No ratings yet
- Design Considerations For An Inverter Output Filter To Mitigate The Effects of Long Motor Leads IDocument8 pagesDesign Considerations For An Inverter Output Filter To Mitigate The Effects of Long Motor Leads IJavier MaldonadoNo ratings yet
- Lessonsections-24 2Document11 pagesLessonsections-24 2Ghazi DallyNo ratings yet
- Modern Physics PDFDocument28 pagesModern Physics PDFsampannkumarNo ratings yet
- Ncert ch7 Physics Class 11Document42 pagesNcert ch7 Physics Class 11Karan ManglaNo ratings yet
- Factor Test ML30MW / 30MW Trafo / TRAFOBCPUDocument11 pagesFactor Test ML30MW / 30MW Trafo / TRAFOBCPUAbhishek RajputNo ratings yet
- EEE 3 Course SyllabusDocument3 pagesEEE 3 Course SyllabusRonaldyn DabuNo ratings yet
- Icramid 148Document8 pagesIcramid 148Nazrul RahmanNo ratings yet
- SENSORSDocument31 pagesSENSORSKenani SaningaNo ratings yet
- 16749-Electric MotorsDocument5 pages16749-Electric MotorsNATHANNo ratings yet
- Exercises: 4.1 Motion Is RelativeDocument4 pagesExercises: 4.1 Motion Is RelativeamilcarsoaresNo ratings yet
- User Guide For 3 Axis TB6560 Driver Board: Product FeaturesDocument9 pagesUser Guide For 3 Axis TB6560 Driver Board: Product FeaturesLúcio Di LoretoNo ratings yet
- Guide To Stepper Motor SelectionDocument3 pagesGuide To Stepper Motor SelectionAnonymous zkYS7cNo ratings yet
- Kuliah 3 Transmission Line Theory Lumped CircuitDocument45 pagesKuliah 3 Transmission Line Theory Lumped CircuitMuhammad Fikri Hidayat FikriNo ratings yet
- Problems in Electrical Machines & Power Systems With SolutionsDocument3 pagesProblems in Electrical Machines & Power Systems With Solutionsgsantosh06No ratings yet
- Presentation On CURRENT SOURCE INVERTERDocument16 pagesPresentation On CURRENT SOURCE INVERTERAakanksha DhidhiNo ratings yet
- Test Details For 765 KV Package EquipmentsDocument8 pagesTest Details For 765 KV Package Equipmentsashwani2101No ratings yet
- Chapter 7 Sensors and TransducersDocument22 pagesChapter 7 Sensors and TransducersAbu ZinnirahNo ratings yet
- EC Syllabus Kerala University (2003 Scheme)Document57 pagesEC Syllabus Kerala University (2003 Scheme)joyasams75% (4)
- Fuf 4 PDFDocument7 pagesFuf 4 PDFAndrea LaudaniNo ratings yet
- Invers or ChinaDocument67 pagesInvers or Chinaand25skyNo ratings yet
- Dynamic Earth Pressures - Simplified Methods PDFDocument38 pagesDynamic Earth Pressures - Simplified Methods PDFjh50000No ratings yet
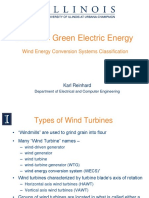
- Wind Energy Systems ClassificationsDocument16 pagesWind Energy Systems ClassificationsSubheesh KTNo ratings yet
- Penentu UkuranDocument2 pagesPenentu UkuranFakhrul AnuarNo ratings yet
- Underwater RoboticsDocument23 pagesUnderwater RoboticsNaman KansalNo ratings yet
- 12-CAD-CAM Modified by MR - Sanjay Kumar-11.9.2013 PDFDocument58 pages12-CAD-CAM Modified by MR - Sanjay Kumar-11.9.2013 PDFRajaReddyNo ratings yet
- Insulation Coordination of UHV SubstationsDocument24 pagesInsulation Coordination of UHV Substationsmohamed faisalNo ratings yet