You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Biology Lab Investigates Diffusion and Osmosis in CellsDocument3 pagesBiology Lab Investigates Diffusion and Osmosis in CellsbriangkentNo ratings yet
- High-Solids Polyester Resins For Appliance and General Metal CoatingsDocument6 pagesHigh-Solids Polyester Resins For Appliance and General Metal CoatingsSyed Ubaid AliNo ratings yet
- Baeyer-Villiger Oxidation of 8-Aryl Substituted Unsaturated Carbonyl Compounds With Hydrogen Peroxide and Catalytic Selenium DioxideDocument15 pagesBaeyer-Villiger Oxidation of 8-Aryl Substituted Unsaturated Carbonyl Compounds With Hydrogen Peroxide and Catalytic Selenium DioxidejavasoloNo ratings yet
- Data XRF ST14Document78 pagesData XRF ST14Achmad Nabil ZulfaqarNo ratings yet
- Substance Chemistry Lesson 2Document16 pagesSubstance Chemistry Lesson 2samsonNo ratings yet
- Heat 1Document36 pagesHeat 1ZainabNo ratings yet
- 3 - Gravimetric Analysis of Calcium and Hard Water - S PDFDocument6 pages3 - Gravimetric Analysis of Calcium and Hard Water - S PDFJon CranNo ratings yet
- Basics of Luminescence & CathodeluminanceDocument91 pagesBasics of Luminescence & CathodeluminanceShankari Nadupalli100% (1)
- Buthelezi, Olaniran, Pillay. 2009. Turbidity and Microbial Load Removal From River Water Using Bioflocculants From Indigenous Bacteria IDocument7 pagesButhelezi, Olaniran, Pillay. 2009. Turbidity and Microbial Load Removal From River Water Using Bioflocculants From Indigenous Bacteria IAzb 711No ratings yet
- Is 2951 1 1965 PDFDocument28 pagesIs 2951 1 1965 PDFlagnajit dasNo ratings yet
- Performance of CI Engines Using Biodiesel As Fuel: January 2009Document14 pagesPerformance of CI Engines Using Biodiesel As Fuel: January 2009Diyar NezarNo ratings yet
- T-308 Admixture - Edition 2015Document2 pagesT-308 Admixture - Edition 2015John Kurong100% (1)
- Work Power Energy JEE TestDocument6 pagesWork Power Energy JEE TestAman RolandNo ratings yet
- MIT CORREL HYDRAULICS GEOTECH 2nd TERM SY 2014 2015 Retake KEY PDFDocument10 pagesMIT CORREL HYDRAULICS GEOTECH 2nd TERM SY 2014 2015 Retake KEY PDFNadine PascualNo ratings yet
- Heat Transfer PDFDocument3 pagesHeat Transfer PDFTahmeed AzizNo ratings yet
- G.6 Q.1 SCIENCE Lesson 2 Homogeneous MixtureDocument35 pagesG.6 Q.1 SCIENCE Lesson 2 Homogeneous MixturemeguiNo ratings yet
- Agbo 2023 IOP Conf. Ser. Earth Environ. Sci. 1178 012019Document10 pagesAgbo 2023 IOP Conf. Ser. Earth Environ. Sci. 1178 012019Agbo sundayNo ratings yet
- Seismic Reference DatumDocument4 pagesSeismic Reference Datumanima198250% (4)
- 5991 5571enDocument10 pages5991 5571enHoanghanh LequangNo ratings yet
- Astm D 6583 00 - Ensaio Padronizado Porosidade Camada de TintaDocument2 pagesAstm D 6583 00 - Ensaio Padronizado Porosidade Camada de TintaNara CamargoNo ratings yet
- Technical Proposal: Gypsum Powder Production Line With Capacity 60000 Tons Per YearDocument25 pagesTechnical Proposal: Gypsum Powder Production Line With Capacity 60000 Tons Per YearJohn TesfamariamNo ratings yet
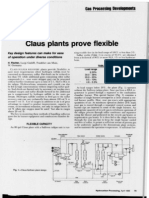
- Claus Plants Prove FlexibleDocument3 pagesClaus Plants Prove Flexiblebakhtiari_afNo ratings yet
- 11962-Encapsulated Citric AcidDocument10 pages11962-Encapsulated Citric AcidantiquekNo ratings yet
- AIChE Pocket HandbookDocument64 pagesAIChE Pocket HandbookDinesh KanaujiyaNo ratings yet
- 11.VIA Group ElementsDocument3 pages11.VIA Group ElementsANIL KumarNo ratings yet
- NMC 123 Questions Semester Test 1Document15 pagesNMC 123 Questions Semester Test 1Hope DlaminiNo ratings yet
- Araldite FT CY205IN Aradur HY905IN DY040 DY061 Si02 Eur e PDFDocument8 pagesAraldite FT CY205IN Aradur HY905IN DY040 DY061 Si02 Eur e PDFneerajaNo ratings yet
- 07 01 2024 JR Super60 NUCLEUS BT Jee Adv2021 P1 CTA 23 Q PaperDocument20 pages07 01 2024 JR Super60 NUCLEUS BT Jee Adv2021 P1 CTA 23 Q Paperzaid khanNo ratings yet
- Ozone Layer & Greenhouse EffectDocument29 pagesOzone Layer & Greenhouse EffectIlyas A HuqqaniNo ratings yet
- Oxford English Dictionary: Physical GeographyDocument1 pageOxford English Dictionary: Physical GeographyCatalin BucurNo ratings yet