You might also like
- 3 Doverview SlidesDocument24 pages3 Doverview SlidesedmordenNo ratings yet
- Survey of Existing SystemDocument9 pagesSurvey of Existing SystemViolet ShaikhNo ratings yet
- Chap 6Document65 pagesChap 6EmanNo ratings yet
- Pyqt5 Project 3Document10 pagesPyqt5 Project 3Yash RajputNo ratings yet
- Chapter 3 SmallDocument28 pagesChapter 3 Smallكوثر جاسم فريدBNo ratings yet
- Handout5 UpdatedDocument19 pagesHandout5 UpdatedSinan IşlekdemirNo ratings yet
- CG Unit-5Document5 pagesCG Unit-5Vathicoming Vikky100% (1)
- Viewports and Clipping (Direct3D 9) - Win32 apps _ Microsoft LearnDocument6 pagesViewports and Clipping (Direct3D 9) - Win32 apps _ Microsoft Learnciuciu.denis.2023No ratings yet
- Final Term: Subject Game ProgrammingDocument5 pagesFinal Term: Subject Game ProgrammingMuhammad Zaeem AkmalNo ratings yet
- ( (3D Terrain) ) 3D Graphic Java - Render Fractal Landscapes - JavaWorldDocument10 pages( (3D Terrain) ) 3D Graphic Java - Render Fractal Landscapes - JavaWorldjdonetoNo ratings yet
- Using Mapping Tools in MATLABDocument22 pagesUsing Mapping Tools in MATLABوجدي بلخيريةNo ratings yet
- Parallax Occlusion Mapping in DirectX 11Document12 pagesParallax Occlusion Mapping in DirectX 11Tech StuffNo ratings yet
- CVnotes2 BhuyanDocument4 pagesCVnotes2 BhuyanN.RAMAKUMARNo ratings yet
- CV Assignment 2 RecognitionARDocument5 pagesCV Assignment 2 RecognitionARPaul BrgrNo ratings yet
- QQQQQQQDocument4 pagesQQQQQQQhariyadiNo ratings yet
- Graphics ProgrammingDocument42 pagesGraphics Programmingapi-383742175% (4)
- Scenery: 1 Background 1.1 Constructor 2 Logo 2.1 Constructor 3 Debug 4 RectplacerDocument6 pagesScenery: 1 Background 1.1 Constructor 2 Logo 2.1 Constructor 3 Debug 4 Rectplacersundeep116No ratings yet
- How To Download SRTM DATADocument4 pagesHow To Download SRTM DATAAshish Kr RoshanNo ratings yet
- Adding Motion in RhinoScriptDocument3 pagesAdding Motion in RhinoScriptJose Luis Paiva GómezNo ratings yet
- Mobile App Canvas 2D GraphicsDocument52 pagesMobile App Canvas 2D Graphicsvera setiawanNo ratings yet
- Computer Graphics (CG CHAP 2)Document32 pagesComputer Graphics (CG CHAP 2)Vuggam VenkateshNo ratings yet
- Computer Graphics Using Opengl, 3 Edition F. S. Hill, Jr. and S. KelleyDocument57 pagesComputer Graphics Using Opengl, 3 Edition F. S. Hill, Jr. and S. KelleySakirin Bin Haji MuhamedNo ratings yet
- 3D Solar System With Opengl and C#Document4 pages3D Solar System With Opengl and C#Shylaja GNo ratings yet
- Animation PDFDocument5 pagesAnimation PDFKENNo ratings yet
- User Guide To Spectroscopy Reduction V.5: Running Background Running ApsumDocument15 pagesUser Guide To Spectroscopy Reduction V.5: Running Background Running ApsumESTUDIANTE JOSE DAVID MARTINEZ RODRIGUEZNo ratings yet
- Introduction GM FuncionsDocument7 pagesIntroduction GM FuncionsGOWRISHANKAR SJNo ratings yet
- Hull Loft Tute NavalDocument39 pagesHull Loft Tute NavalKalev PaicoNo ratings yet
- Screen Space Fluid Rendering For GamesDocument19 pagesScreen Space Fluid Rendering For GamesMyungHyun YangNo ratings yet
- Implementing A Virtual TrackballDocument4 pagesImplementing A Virtual Trackballkinny1974No ratings yet
- Gmax Terrain TutorialDocument7 pagesGmax Terrain TutorialKonstantin SusdaltzewNo ratings yet
- Project 1: Pretty Pictures: TurtleDocument13 pagesProject 1: Pretty Pictures: Turtlesamuel denilson tocto peñaNo ratings yet
- Visible Surface Detection and Computer Animation ClassificationDocument4 pagesVisible Surface Detection and Computer Animation ClassificationprincejiNo ratings yet
- 3D Graphics Rendering Pipeline OverviewDocument35 pages3D Graphics Rendering Pipeline OverviewDept PhysNo ratings yet
- Wenzel-Real-time Atmospheric Effects in GamesDocument39 pagesWenzel-Real-time Atmospheric Effects in GamesStar ZhangNo ratings yet
- Embedding Interactive 3d Objects Into PDF Documents: $-B /PM/SQRT (b2 - 4ac) /over2a$Document14 pagesEmbedding Interactive 3d Objects Into PDF Documents: $-B /PM/SQRT (b2 - 4ac) /over2a$16061977No ratings yet
- GEO/EVS 425/525 Unit 7 Satellite Image Rectification: Step 1: Subsetting and Layerstacking Your ImageDocument6 pagesGEO/EVS 425/525 Unit 7 Satellite Image Rectification: Step 1: Subsetting and Layerstacking Your ImageDavid Andrés HerreraNo ratings yet
- Final MaterialDocument55 pagesFinal MaterialbekemaNo ratings yet
- Plot 3dec GuideDocument10 pagesPlot 3dec GuideazulNo ratings yet
- Siggraph2011 SpecialEffectsWithDepth WithNotesDocument57 pagesSiggraph2011 SpecialEffectsWithDepth WithNotesMoises Otero SerranoNo ratings yet
- Hill CH 3 Ed 3Document57 pagesHill CH 3 Ed 3Suada Bőw WéěžýNo ratings yet
- Computer Notes - Perspective ProjectionDocument10 pagesComputer Notes - Perspective ProjectionecomputernotesNo ratings yet
- XNA For Windows PhoneDocument18 pagesXNA For Windows PhoneotakkingNo ratings yet
- 3d GIS Workshop - ExtrusionsDocument5 pages3d GIS Workshop - ExtrusionsRicardo Javier Garnica PeñaNo ratings yet
- Computer Graphics - Question BankDocument8 pagesComputer Graphics - Question BankSyedkareem_hkg100% (1)
- Tutorial 6: Scene Graphs: New ConceptsDocument12 pagesTutorial 6: Scene Graphs: New ConceptsSplinter FrankensteinNo ratings yet
- Cee / Ies 656 Lab 11: Functional Analysis of Surface Models: Part I. OverviewDocument11 pagesCee / Ies 656 Lab 11: Functional Analysis of Surface Models: Part I. OverviewramsNo ratings yet
- 15 Tutorial 13 - Cube MappingDocument14 pages15 Tutorial 13 - Cube MappingImran HaroonNo ratings yet
- CG Unit 1Document21 pagesCG Unit 1mahiNo ratings yet
- Lidar FinalDocument46 pagesLidar Finalsanda anaNo ratings yet
- The Role of OpenGL in 3D Graphics RenderingDocument31 pagesThe Role of OpenGL in 3D Graphics RenderingwalelegneNo ratings yet
- Ray Casting TutorialDocument33 pagesRay Casting TutorialeimherNo ratings yet
- Ws0910 Opengl 03 Camera Hidden LineDocument48 pagesWs0910 Opengl 03 Camera Hidden LineGergana IvanovaNo ratings yet
- CGA Sem 4Document15 pagesCGA Sem 4Sam SepiolNo ratings yet
- 3D Drawing in Visual Basic PDFDocument14 pages3D Drawing in Visual Basic PDFAlessandro PalliniNo ratings yet
- Mapping Software Visual Basic TutorialDocument12 pagesMapping Software Visual Basic TutorialxdepaulaNo ratings yet
- Cse-Vi-computer Graphics and Visualization (10cs65) - SolutionDocument77 pagesCse-Vi-computer Graphics and Visualization (10cs65) - SolutionShinu Gopal MNo ratings yet
- Scratch Games Programming for Kids & Students: A Step-by-Step Guide and Design Programs for Creating Thoughtful Animations, Puzzles, and Games with Scratch 3.0From EverandScratch Games Programming for Kids & Students: A Step-by-Step Guide and Design Programs for Creating Thoughtful Animations, Puzzles, and Games with Scratch 3.0No ratings yet
- Maya 3Ds Max Softimage: KatanaDocument1 pageMaya 3Ds Max Softimage: KatanarendermanuserNo ratings yet
- Prman NotesDocument9 pagesPrman NotesrendermanuserNo ratings yet
- Fusion 8 Scripting GuideDocument217 pagesFusion 8 Scripting GuideAvinash JagarlamudiNo ratings yet
- Katana Viewer A Pi Getting Started GuideDocument30 pagesKatana Viewer A Pi Getting Started GuiderendermanuserNo ratings yet
- Multiverse WorkflowsDocument1 pageMultiverse WorkflowsrendermanuserNo ratings yet
- GDM February 2009Document68 pagesGDM February 2009rendermanuserNo ratings yet
- Comic Design SamplerDocument1 pageComic Design SamplerrendermanuserNo ratings yet
- Arnold For Maya User Guide: SearchDocument2 pagesArnold For Maya User Guide: SearchrendermanuserNo ratings yet
- MultiverseDocument2 pagesMultiverserendermanuserNo ratings yet
- Building Survey Property Address PreviewDocument47 pagesBuilding Survey Property Address PreviewrendermanuserNo ratings yet
- Correct Death Registration in 40 CharactersDocument3 pagesCorrect Death Registration in 40 CharactersrendermanuserNo ratings yet
- How to Avoid Rejection at SIGGRAPHDocument4 pagesHow to Avoid Rejection at SIGGRAPHrendermanuserNo ratings yet
- BG Painting TipsDocument3 pagesBG Painting TipsrendermanuserNo ratings yet
- Hydra Pixar Presentation S5327-Jeremy-CowlesDocument23 pagesHydra Pixar Presentation S5327-Jeremy-CowlesrendermanuserNo ratings yet
- Cartooning Jobs For Beginning CartoonistsDocument2 pagesCartooning Jobs For Beginning CartoonistsrendermanuserNo ratings yet
- CBZ90 Sampler PDFDocument9 pagesCBZ90 Sampler PDFrendermanuserNo ratings yet
- The Know How of CartooningDocument49 pagesThe Know How of CartooningrendermanuserNo ratings yet
- CBZ90 Sampler PDFDocument9 pagesCBZ90 Sampler PDFrendermanuserNo ratings yet
- Toonstyle Tips (Smallpdf - Com)Document6 pagesToonstyle Tips (Smallpdf - Com)rendermanuserNo ratings yet
- Illustration MagDocument16 pagesIllustration MagrendermanuserNo ratings yet
- Magic Color Flair The World of Mary Blair PDFDocument20 pagesMagic Color Flair The World of Mary Blair PDFrendermanuser100% (2)
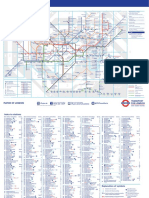
- Standard Tube Map PDFDocument2 pagesStandard Tube Map PDFrendermanuserNo ratings yet
- Pythonforkatana 170326112919Document37 pagesPythonforkatana 170326112919rendermanuserNo ratings yet
- AnimCouleur2 User Guide 01Document2 pagesAnimCouleur2 User Guide 01rendermanuserNo ratings yet
- Animation Andrew SelbyDocument217 pagesAnimation Andrew Selbyrendermanuser92% (13)
- Maya Python A PiDocument582 pagesMaya Python A Pirendermanuser100% (1)
- AnimDessin2 User Guide 01Document2 pagesAnimDessin2 User Guide 01rendermanuser100% (1)
- Nodal Scene InterfaceDocument51 pagesNodal Scene InterfacerendermanuserNo ratings yet
- Comic Artists - WorkingMethodsDocument36 pagesComic Artists - WorkingMethodsrendermanuserNo ratings yet
- How To Read A Skull Like An Open BookDocument8 pagesHow To Read A Skull Like An Open BookrendermanuserNo ratings yet
- Cube-A User Manual ENG V5.0Document122 pagesCube-A User Manual ENG V5.0Theeraruk ManeenartNo ratings yet
- JQE TemplateDocument6 pagesJQE TemplateMilenaBrasilNo ratings yet
- Vuescan ManualDocument52 pagesVuescan ManualB DarbariNo ratings yet
- Master the art of letterpressDocument5 pagesMaster the art of letterpressmarielahurtado79No ratings yet
- Planmeca Twain InterfaceDocument29 pagesPlanmeca Twain InterfaceAnonymous JKdIGb9No ratings yet
- Image Import, Processing & Export in MATLABDocument5 pagesImage Import, Processing & Export in MATLABrajivsharma1610No ratings yet
- Cube-A User Manual ENG V4.2Document174 pagesCube-A User Manual ENG V4.2audilemansNo ratings yet
- GPS and GIS)Document5 pagesGPS and GIS)Aremacho ErkazetNo ratings yet
- Connect Tutorial GeologDocument59 pagesConnect Tutorial GeologkodogsaktiNo ratings yet
- RRR Media Kit April 2018Document12 pagesRRR Media Kit April 2018SilasNo ratings yet
- Gds Manual Flo2d ProDocument182 pagesGds Manual Flo2d ProbycmNo ratings yet
- Namma Kalvi Computer Applications Chapter 1 To 4 Sura Guide em 214936Document75 pagesNamma Kalvi Computer Applications Chapter 1 To 4 Sura Guide em 214936Aakaash C.K.100% (1)
- Asian Photography 201403Document100 pagesAsian Photography 201403Dragan Cvetkovic100% (1)
- FCD ManualDocument84 pagesFCD ManualMas Inoenk Nurdin Sulistiyono0% (1)
- Information Requirements For Welding of Pressure Containing Equipment and PipingDocument20 pagesInformation Requirements For Welding of Pressure Containing Equipment and PipingPramod Athiyarathu100% (1)
- Surfer 9 Version InfoDocument4 pagesSurfer 9 Version InfoEmre MermerNo ratings yet
- RawDigger ManualDocument91 pagesRawDigger ManualMihael UWOONo ratings yet
- Understanding Oracle Webcenter ContentDocument34 pagesUnderstanding Oracle Webcenter Contentbgowda_erp1438No ratings yet
- A Short Guide To Clinical Digital Photography in OrthodonticsDocument32 pagesA Short Guide To Clinical Digital Photography in Orthodonticsaeham-521No ratings yet
- Guidelines - Crystal Growth & DesignDocument19 pagesGuidelines - Crystal Growth & Designumesh123patilNo ratings yet
- Aep Letterhead and Logo GraphicsDocument1 pageAep Letterhead and Logo Graphicsprincess catherineNo ratings yet
- InVest ModellingDocument31 pagesInVest Modellingagus muhamad MaulanaNo ratings yet
- Tekla Structures - Templates and Reports GuideDocument31 pagesTekla Structures - Templates and Reports GuideShahfaraz Ahmad100% (1)
- Guidelines for interpreting the EU Cosmetics DirectiveDocument3 pagesGuidelines for interpreting the EU Cosmetics DirectiveVíctor Digón TrabadoNo ratings yet
- CHDK Sx120is HowtoDocument8 pagesCHDK Sx120is HowtoBulea EmilianNo ratings yet
- Document Centre 440 & 432 & 425Document6 pagesDocument Centre 440 & 432 & 425dian riantiNo ratings yet
- Brochure ECOSYS M6630cidn M6635cidn INDocument4 pagesBrochure ECOSYS M6630cidn M6635cidn INjeneshNo ratings yet
- Instructions 2013Document15 pagesInstructions 2013Anca PopNo ratings yet
- Normas Publicação ACS Food Science and TechnologyDocument20 pagesNormas Publicação ACS Food Science and TechnologyGleice ReinertNo ratings yet
- Visioneer Onetouch: User'S GuideDocument76 pagesVisioneer Onetouch: User'S Guidesanveer76No ratings yet