You might also like
- High-Precision Time-Of-Flight Determination Algorithm For Ultrasonic Flow MeasurementDocument9 pagesHigh-Precision Time-Of-Flight Determination Algorithm For Ultrasonic Flow MeasurementHamid M SedighiNo ratings yet
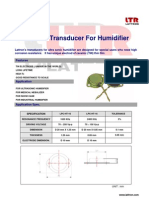
- Piezo HumidifierDocument2 pagesPiezo HumidifierRoberto M. SousaNo ratings yet
- Loudspeaker Impedance With Sia Smaartlive: Paul D. HendersonDocument7 pagesLoudspeaker Impedance With Sia Smaartlive: Paul D. HendersonGabo CodornizNo ratings yet
- FT 897 Technical SupplementDocument85 pagesFT 897 Technical SupplementCarlos Henrique MonteiroNo ratings yet
- Lecture 5: Transformers (Continued)Document16 pagesLecture 5: Transformers (Continued)Aldiansyah dtsNo ratings yet
- Cavity ResonatorDocument14 pagesCavity ResonatorVenkata RatnamNo ratings yet
- Cushman Model CE-3 FM Communication Monitor Manual, 1968.Document139 pagesCushman Model CE-3 FM Communication Monitor Manual, 1968.Bob Laughlin, KWØRL100% (6)
- VXR-9000V Service ManualDocument98 pagesVXR-9000V Service ManualSerhat SertakanNo ratings yet
- Cavity ResonatorDocument20 pagesCavity ResonatorHarsh KaushalyaNo ratings yet
- 1308 - 12297 A New Class-D Stereo Audio Amplifier Using Direct Speaker Current ControlDocument3 pages1308 - 12297 A New Class-D Stereo Audio Amplifier Using Direct Speaker Current Controlrodales56No ratings yet
- Transformers in audio design optimized for SEODocument3 pagesTransformers in audio design optimized for SEOnestor.escala7666No ratings yet
- NIT Karnataka CMUT Design Improves Using Piston-Shaped MembranesDocument7 pagesNIT Karnataka CMUT Design Improves Using Piston-Shaped MembranesAdityaNo ratings yet
- J 39 Mat Lab Program Crossover DesignDocument15 pagesJ 39 Mat Lab Program Crossover DesignismailNo ratings yet
- Phase Noise in OscillatorsDocument20 pagesPhase Noise in OscillatorsName100% (1)
- EFA Loudspeakers Using Ionic Wind TechnologyDocument7 pagesEFA Loudspeakers Using Ionic Wind TechnologymcgureNo ratings yet
- U8 L3 Delay Line CancellersDocument3 pagesU8 L3 Delay Line CancellerssdfghjkjhgNo ratings yet
- Acoustic Prop Model Thru MatlabDocument75 pagesAcoustic Prop Model Thru MatlabArvind MuraliNo ratings yet
- Audio Transformer - Final Report - (Pichkalyov KPI Ukraine)Document9 pagesAudio Transformer - Final Report - (Pichkalyov KPI Ukraine)kimbalsummers801No ratings yet
- GQX 3102Document2 pagesGQX 3102yohanaNo ratings yet
- Analog Circuits II Lab ManualDocument47 pagesAnalog Circuits II Lab ManualParesh SawantNo ratings yet
- Mike HarwoodDocument26 pagesMike HarwoodPraveen AndrewNo ratings yet
- RA60H1317M RF Power MOSFET Amplifier Module DatasheetDocument9 pagesRA60H1317M RF Power MOSFET Amplifier Module DatasheetAbbas MaghazehiNo ratings yet
- Yaesu FT-203R Instruction ManualDocument28 pagesYaesu FT-203R Instruction ManualYayok S. AnggoroNo ratings yet
- Datasheet f1010Document8 pagesDatasheet f1010shobu21100% (1)
- Ga 399 MaDocument9 pagesGa 399 MaEnos Marcos BastosNo ratings yet
- LTBHDocument20 pagesLTBHİ. Çağlar YILDIRIMNo ratings yet
- 5-channel stereo graphic equalizer ICsDocument5 pages5-channel stereo graphic equalizer ICsEnya Andrea Ribba HernandezNo ratings yet
- VX 1700 Technical InformationDocument10 pagesVX 1700 Technical InformationHenry AlvaxNo ratings yet
- VX-2100 2200 VHF EuDocument68 pagesVX-2100 2200 VHF EudenariraNo ratings yet
- Common-base amplifier linearization using augmentationDocument3 pagesCommon-base amplifier linearization using augmentationAnwar ZainuddinNo ratings yet
- Mu Stage Philosophy: Alan KimmelDocument10 pagesMu Stage Philosophy: Alan KimmelbigpriapNo ratings yet
- Solid State OscilloscopeDocument25 pagesSolid State OscilloscopeVincent KorieNo ratings yet
- Transistor OsicllatorsDocument47 pagesTransistor OsicllatorsMohammad Gulam AhamadNo ratings yet
- Step Recovery Diode Frequency MultiplierDocument4 pagesStep Recovery Diode Frequency MultiplierfahkingmoronNo ratings yet
- Onken - Calc (1) 414 AlnicoDocument4 pagesOnken - Calc (1) 414 AlnicoRoberto KielNo ratings yet
- Transistor Active High Pass Filter Electronics NotesDocument2 pagesTransistor Active High Pass Filter Electronics NotesRenato DeákNo ratings yet
- JBL SSDMDocument105 pagesJBL SSDMEmmanuel Zamora Manuelini ZamoriniNo ratings yet
- Antenna Analyzer vk5jst Version 1 Instructions PDFDocument10 pagesAntenna Analyzer vk5jst Version 1 Instructions PDFPisu Miau Pisu MiauNo ratings yet
- Esenboga Airport BriefingDocument1,289 pagesEsenboga Airport BriefingferkutNo ratings yet
- Vogel LowNoiseBJT PDFDocument4 pagesVogel LowNoiseBJT PDFAnonymous AaLl1JEqNo ratings yet
- A New Ultrasonic Flow Metering Technique Using Two Sing-Around Paths, Along With The Criticism of The Disadvantages Inherent in Conventional Ultrasonic Flow Metering TransducersDocument10 pagesA New Ultrasonic Flow Metering Technique Using Two Sing-Around Paths, Along With The Criticism of The Disadvantages Inherent in Conventional Ultrasonic Flow Metering Transducersvitor_pedroNo ratings yet
- Stereo Toner Control CircuitDocument9 pagesStereo Toner Control Circuitsyed_hafeez_2No ratings yet
- Tabulation of Published Data On Electron Devices of The U.S.S.R. December 1976Document144 pagesTabulation of Published Data On Electron Devices of The U.S.S.R. December 1976Sam SatalofNo ratings yet
- Upower Analog 2Q08 Calpoly SM FinalDocument36 pagesUpower Analog 2Q08 Calpoly SM FinalSteveAbonyiNo ratings yet
- Signal Generator ManualDocument6 pagesSignal Generator ManualDave ShshNo ratings yet
- Opa381 PDFDocument19 pagesOpa381 PDFVictoria Guerrero100% (1)
- Footboard Travel Alert SystemDocument40 pagesFootboard Travel Alert SystemSaravanan Viswakarma100% (2)
- Tube Program Equalizer 3 Bands of Glory AnalogvibesDocument8 pagesTube Program Equalizer 3 Bands of Glory AnalogvibesbertosamNo ratings yet
- A Manual Tuning Method For Coupled Cavity FiltersDocument3 pagesA Manual Tuning Method For Coupled Cavity FiltersDo Son100% (1)
- Audio Output TransDocument11 pagesAudio Output TransBill PerkinsNo ratings yet
- Setup a Filtered DC Power Supply Using the B&K Precision Model 2902 Substitution MasterDocument11 pagesSetup a Filtered DC Power Supply Using the B&K Precision Model 2902 Substitution MasterGeo TogNo ratings yet
- 10 Watts HF Amplifier & Basic Linear AmplifierDocument18 pages10 Watts HF Amplifier & Basic Linear AmplifierAmador Garcia III100% (1)
- Continuous Glucose Monitoring (CGM) and Sensor-Augmented Pump Therapy (SAP)From EverandContinuous Glucose Monitoring (CGM) and Sensor-Augmented Pump Therapy (SAP)No ratings yet
- Millimicrosecond Pulse Techniques: International Series of Monographs on Electronics and InstrumentationFrom EverandMillimicrosecond Pulse Techniques: International Series of Monographs on Electronics and InstrumentationNo ratings yet
- British Special Quality Valves and Electron Tube Devices Data Annual 1964–65From EverandBritish Special Quality Valves and Electron Tube Devices Data Annual 1964–65No ratings yet
- Full Report - E1Document13 pagesFull Report - E1Naddy MohdNo ratings yet
- Development of A High Frequency and High-Voltage Pulse Transformer For A TWT HvpsDocument4 pagesDevelopment of A High Frequency and High-Voltage Pulse Transformer For A TWT HvpsShyam SuryaNo ratings yet
- An 023Document8 pagesAn 023SoumitraNo ratings yet
- Installation Guide of DAS Xentry 01 - 2014Document2 pagesInstallation Guide of DAS Xentry 01 - 2014pablodanielrigo100% (2)
- Activation InstructionsDocument6 pagesActivation InstructionskjansaNo ratings yet
- Hummer ObdDocument4 pagesHummer ObdpablodanielrigoNo ratings yet
- Power Derived From Serial PortDocument5 pagesPower Derived From Serial PortpablodanielrigoNo ratings yet
- RSTrainer CD-ROM CoursesDocument2 pagesRSTrainer CD-ROM CoursesRoberth PuenteNo ratings yet
- Diagnostico SETRY 100Document6 pagesDiagnostico SETRY 100pablodanielrigoNo ratings yet
- Elnet LTC - User ManualDocument15 pagesElnet LTC - User ManualpablodanielrigoNo ratings yet
- Elnet TXT - User ManualDocument83 pagesElnet TXT - User ManualpablodanielrigoNo ratings yet
- PS0500 Service ManualDocument33 pagesPS0500 Service Manualmoussa77% (13)
- Hummer ObdDocument4 pagesHummer ObdpablodanielrigoNo ratings yet
- CanDocument11 pagesCanpablodanielrigo100% (2)
- Alti MetroDocument1 pageAlti MetropablodanielrigoNo ratings yet
- CAN BusDocument9 pagesCAN Buspablodanielrigo100% (2)
- MCP 2551Document24 pagesMCP 2551senguttuvelNo ratings yet
- ENC28J60 Ethernet Interface ModuleDocument1 pageENC28J60 Ethernet Interface ModulepablodanielrigoNo ratings yet
- BusesDocument11 pagesBusespablodanielrigoNo ratings yet
- 10 KW Conversor de IonosferaDocument4 pages10 KW Conversor de Ionosferapablodanielrigo100% (1)
- Sensores Inductivos Con Puente de Wheastone y de WyerDocument41 pagesSensores Inductivos Con Puente de Wheastone y de WyerpablodanielrigoNo ratings yet
- Top221 227Document20 pagesTop221 227JEVG1No ratings yet
- Read MeDocument3 pagesRead MeKristian Adi WinataNo ratings yet
- Datasheet BD241Document6 pagesDatasheet BD241pablodanielrigoNo ratings yet
- High-Frequency Model of The Power Transformer Based On Frequency-Response MeasurementsDocument9 pagesHigh-Frequency Model of The Power Transformer Based On Frequency-Response MeasurementsFernando PaezNo ratings yet
- BB&LBBDocument33 pagesBB&LBBMelkin NPNo ratings yet
- Atmospheric Pressure Plasma Jet Powered by Piezoelectric Direct DischargeDocument14 pagesAtmospheric Pressure Plasma Jet Powered by Piezoelectric Direct DischargeAndrei VasileNo ratings yet
- Uses and Abuses of The VU Meter - Oliver Berliner (Audio, Nov 1955)Document4 pagesUses and Abuses of The VU Meter - Oliver Berliner (Audio, Nov 1955)jimmy67musicNo ratings yet
- Low Pass & High Pass Pi Section Filter Lab ManualDocument17 pagesLow Pass & High Pass Pi Section Filter Lab ManualRiya MaityNo ratings yet
- Darabi Integraded RF Front EndDocument13 pagesDarabi Integraded RF Front Endsriramv86No ratings yet
- Architectural Acoustics: Briiel & KjaerDocument172 pagesArchitectural Acoustics: Briiel & KjaerdimchienNo ratings yet
- Design of Mm-Wave Mic Frequency Multipliers and Mixers Using Simple Microstrip High-Pass FiltersDocument4 pagesDesign of Mm-Wave Mic Frequency Multipliers and Mixers Using Simple Microstrip High-Pass Filterskoke_8902No ratings yet
- B&C De10Document1 pageB&C De10Adina PredaNo ratings yet
- CM P1 11604 en SKF Vibration Sensors CatalogDocument140 pagesCM P1 11604 en SKF Vibration Sensors CatalogMarcelo MallmannNo ratings yet
- Gen Set Controller GC 1f 2Document13 pagesGen Set Controller GC 1f 2Luis Campagnoli100% (2)
- 8 MVA 33/11 KV STEP DOWN TRANSFORMERSDocument30 pages8 MVA 33/11 KV STEP DOWN TRANSFORMERSHamayoun MurtazaNo ratings yet
- Lft-Tet, Transformer Trainer Exp Manual, 9082b, ImtacDocument102 pagesLft-Tet, Transformer Trainer Exp Manual, 9082b, ImtacRanciesHambreyMagatRodriguezNo ratings yet
- TWMC Price BookDocument142 pagesTWMC Price BookJuan UlinNo ratings yet
- 11 - Protection of Transmission Lines PDFDocument107 pages11 - Protection of Transmission Lines PDFWahed Imtiaz100% (2)
- 01 Alternators02Document15 pages01 Alternators02HasanAlBannaBhuiyanNo ratings yet
- Course SyllabusDocument56 pagesCourse SyllabusjigarspatelNo ratings yet
- What Is ElectricityDocument22 pagesWhat Is ElectricityLudyLyn Petallana - Sanopo100% (1)
- Unit I: Fundamental of Protective Relaying: Class: B.E. (Electrical) Subject: Switchgear and ProtectionDocument6 pagesUnit I: Fundamental of Protective Relaying: Class: B.E. (Electrical) Subject: Switchgear and Protectionage geaNo ratings yet
- Philips RF Manual 2nd EditionDocument83 pagesPhilips RF Manual 2nd EditionStephen Dunifer100% (14)
- User Guide: Constant-Current-Draw AmplifierDocument20 pagesUser Guide: Constant-Current-Draw AmplifierHuythuong NguyenNo ratings yet
- MW Lab Manual 17euec053Document131 pagesMW Lab Manual 17euec053Level Zero GamingNo ratings yet
- Unit IvDocument16 pagesUnit IvZafar Ali KhanNo ratings yet
- ResearchDocument262 pagesResearcholiver sepnioNo ratings yet
- DIRANA Application Guide - Measuring and Analyzing Power TransformersDocument33 pagesDIRANA Application Guide - Measuring and Analyzing Power TransformersDeal Achmad Fadeal100% (5)
- AC Circuit AnalysisDocument4 pagesAC Circuit AnalysisShroyonNo ratings yet
- CT/PT Analyzer Tests Transformers in SecondsDocument5 pagesCT/PT Analyzer Tests Transformers in SecondsHồ Đắc HuyNo ratings yet
- Transformer Drawing SubmissionDocument5 pagesTransformer Drawing SubmissionFareh KhanNo ratings yet
- Steinmetz CP Symbolic Representation of General Alternating Waves and Double Frequency Vectors 1Document29 pagesSteinmetz CP Symbolic Representation of General Alternating Waves and Double Frequency Vectors 1alpcruz100% (1)
- Cable Sizing Calculation - Open ElectricalDocument9 pagesCable Sizing Calculation - Open ElectricalTaz UddinNo ratings yet