You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- ACM2 TAU Datasheet enDocument5 pagesACM2 TAU Datasheet envishiwizardNo ratings yet
- Northern Hemisphere Electronic Navigation Resources: Day Skipper and Watch LeaderDocument8 pagesNorthern Hemisphere Electronic Navigation Resources: Day Skipper and Watch LeaderSean DolanNo ratings yet
- Sensors Used in HEVDocument4 pagesSensors Used in HEVvishiwizard100% (1)
- Engineered PlasticsDocument61 pagesEngineered Plastics고병석No ratings yet
- GA 33 KV VCB HT Panel - Siddharth Nagar Project. UPDocument17 pagesGA 33 KV VCB HT Panel - Siddharth Nagar Project. UPaayushNo ratings yet
- 7 ReferencesDocument6 pages7 Referencessuneerav17100% (1)
- International Law of The Sea: 1.1. What Is It?Document21 pagesInternational Law of The Sea: 1.1. What Is It?Clark Kenntt50% (2)
- Electrical Resin BenefitsDocument2 pagesElectrical Resin BenefitsvishiwizardNo ratings yet
- Engine Retrofit Guide v8Document70 pagesEngine Retrofit Guide v8Romulo AlvarezNo ratings yet
- Week 5 - Creativity in ResearchDocument4 pagesWeek 5 - Creativity in ResearchD Barik100% (1)
- Hardware Inloop Simulation IEEE LabVIEWDocument1 pageHardware Inloop Simulation IEEE LabVIEWvishiwizardNo ratings yet
- Part Winding Startting The Three-Phase Squirrel Cage Induction Motor Air Gap Magnetic Field AnalysisDocument6 pagesPart Winding Startting The Three-Phase Squirrel Cage Induction Motor Air Gap Magnetic Field AnalysisIjabiNo ratings yet
- 50 SCS Automotive Coatings - Rev0913Document4 pages50 SCS Automotive Coatings - Rev0913vishiwizardNo ratings yet
- LJLVJK LVJJV LKJVDocument5 pagesLJLVJK LVJJV LKJVvishiwizardNo ratings yet
- TRL Definitions PDFDocument1 pageTRL Definitions PDFBHARadwajNo ratings yet
- ReadmeDocument4 pagesReadmevishiwizardNo ratings yet
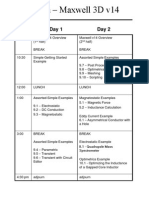
- Maxwell 3D v14 Training AgendaDocument1 pageMaxwell 3D v14 Training AgendavishiwizardNo ratings yet
- Recent Advances in Materials For Use in Permanent Magnet Machines - A ReviewDocument7 pagesRecent Advances in Materials For Use in Permanent Magnet Machines - A ReviewvishiwizardNo ratings yet
- Electric Vehicle Motor Design NotesDocument131 pagesElectric Vehicle Motor Design NotesvishiwizardNo ratings yet
- 5 SmanualDocument16 pages5 SmanualMark ThomasNo ratings yet
- Jeas 1012 787Document5 pagesJeas 1012 787vishiwizardNo ratings yet
- FAB Resistivity White PaperDocument8 pagesFAB Resistivity White PapervishiwizardNo ratings yet
- Op - XT546 246 346 - Op288 V03Document2 pagesOp - XT546 246 346 - Op288 V03vishiwizardNo ratings yet
- Maxwell 2dDocument7 pagesMaxwell 2dvishiwizardNo ratings yet
- How to Check a MOSFETDocument2 pagesHow to Check a MOSFETvishiwizardNo ratings yet
- Nit 3600 1Document5 pagesNit 3600 1vishiwizardNo ratings yet
- Presentation 1Document1 pagePresentation 1vishiwizardNo ratings yet
- Big Energy Series 11.5.2012 Qing-Chang ZhongDocument1 pageBig Energy Series 11.5.2012 Qing-Chang ZhongvishiwizardNo ratings yet
- FTF Aut f0234Document38 pagesFTF Aut f0234vishiwizardNo ratings yet
- Cam DesignDocument13 pagesCam DesignvishiwizardNo ratings yet
- Brushless Motor FundamentalsDocument13 pagesBrushless Motor FundamentalsvishiwizardNo ratings yet
- Wittich2011 SonkusaleVanderveldeDocument1 pageWittich2011 SonkusaleVanderveldevishiwizardNo ratings yet
- Lit Survey RamamurthyDocument9 pagesLit Survey RamamurthyvishiwizardNo ratings yet
- Motor Primer1Document2 pagesMotor Primer1vishiwizardNo ratings yet
- Sona SPEED CatalogueDocument13 pagesSona SPEED CataloguevishiwizardNo ratings yet
- A Brief Overview of Electric & Hybrid Electric Vehicle TechnologiesDocument1 pageA Brief Overview of Electric & Hybrid Electric Vehicle TechnologiesvishiwizardNo ratings yet
- Speech Language Impairment - Eduu 511Document15 pagesSpeech Language Impairment - Eduu 511api-549169454No ratings yet
- Quote: Quotation Prepared By: Sloan SellersDocument2 pagesQuote: Quotation Prepared By: Sloan SellersRubén CastañoNo ratings yet
- Basic Engineering & Site DataDocument13 pagesBasic Engineering & Site DataBalasubramanianNo ratings yet
- Katalog - Bengkel Print Indonesia PDFDocument32 pagesKatalog - Bengkel Print Indonesia PDFJoko WaringinNo ratings yet
- Critical Thinking Handout PDFDocument1 pageCritical Thinking Handout PDFAnoosh IqraNo ratings yet
- Laptop Chip Level CourseDocument2 pagesLaptop Chip Level CourselghmshariNo ratings yet
- MATHEMATICS Compulsory Part Paper 1: Question-Answer BookDocument20 pagesMATHEMATICS Compulsory Part Paper 1: Question-Answer Booknicole wongNo ratings yet
- Philadelphia University Faculty of Engineering and Technology Department of Mechanical EngineeringDocument8 pagesPhiladelphia University Faculty of Engineering and Technology Department of Mechanical EngineeringTamer JafarNo ratings yet
- 1st Periodic Test - Math 9Document2 pages1st Periodic Test - Math 9Anna Rose Godes AntioquiaNo ratings yet
- Nervous System Reaction PaperDocument3 pagesNervous System Reaction PaperJohn Ruel Sanchez IINo ratings yet
- Personal Data Form: World English Placement Test Package Photocopiable © 2011 Heinle, Cengage LearningDocument2 pagesPersonal Data Form: World English Placement Test Package Photocopiable © 2011 Heinle, Cengage Learningadri shimizuNo ratings yet
- Valve Type Trim Type CF XTDocument1 pageValve Type Trim Type CF XTAye KyweNo ratings yet
- ARHITECTURA Si FOCULDocument282 pagesARHITECTURA Si FOCULTheodor DinuNo ratings yet
- Ttb-709016-172718-172718de-65f (MTS46) PDFDocument1 pageTtb-709016-172718-172718de-65f (MTS46) PDFAnonymous OM5uU6No ratings yet
- ECO Report 03Document96 pagesECO Report 03ahmedshah512No ratings yet
- NASA: 2202main COL Debris Boeing 030121Document9 pagesNASA: 2202main COL Debris Boeing 030121NASAdocumentsNo ratings yet
- Mass Transfer in Industrial ApplicationsDocument1 pageMass Transfer in Industrial ApplicationsMPD19I001 VITHISHA MNo ratings yet
- Kadvani Forge Limitennnd3Document133 pagesKadvani Forge Limitennnd3Kristen RollinsNo ratings yet
- Anti Climbers FlyerDocument2 pagesAnti Climbers Flyeredark2009No ratings yet
- Disaster Readiness Exam SpecificationsDocument2 pagesDisaster Readiness Exam SpecificationsRICHARD CORTEZNo ratings yet
- Cilindros Parker 3H & 3HD, Parts Identification, Maintenance & Seal KitsDocument6 pagesCilindros Parker 3H & 3HD, Parts Identification, Maintenance & Seal KitsFernandoNo ratings yet
- Boyut AnaliziDocument65 pagesBoyut AnaliziHasan Kayhan KayadelenNo ratings yet
- Free Study PDF Download from pebexam BlogDocument22 pagesFree Study PDF Download from pebexam Blogk_jaiswalNo ratings yet
- C 6 Slings SafetyDocument29 pagesC 6 Slings SafetyAshraf BeramNo ratings yet