You might also like
- Ejercicios de Integrales de Línea, Superficie y VolumenFrom EverandEjercicios de Integrales de Línea, Superficie y VolumenRating: 4 out of 5 stars4/5 (2)
- Característica Mecánica PDFDocument4 pagesCaracterística Mecánica PDFhierromovilNo ratings yet
- Grupo 33Document11 pagesGrupo 33Wilbert Murillo MNo ratings yet
- Servicios complementarios en sistemas eléctricos de potencia: Análisis y modelamientoFrom EverandServicios complementarios en sistemas eléctricos de potencia: Análisis y modelamientoRating: 5 out of 5 stars5/5 (1)
- Modelado de Motor DC Con PIDDocument6 pagesModelado de Motor DC Con PIDjuan romerooNo ratings yet
- Curso moderno de máquinas eléctricas rotativas: Las máquinas eléctricas en régimen dinámicoFrom EverandCurso moderno de máquinas eléctricas rotativas: Las máquinas eléctricas en régimen dinámicoNo ratings yet
- Análisis de Transitorios Eléctricos en Generadores Eólicos de Inducción de Velocidad Fija, Mediante Simulaciones en EmtpatpdrawDocument8 pagesAnálisis de Transitorios Eléctricos en Generadores Eólicos de Inducción de Velocidad Fija, Mediante Simulaciones en EmtpatpdrawOscar Gutierrez100% (1)
- Montaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109From EverandMontaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109No ratings yet
- Analisis Yfunción de Transferencia Máquina de Corriente Continua SerieDocument8 pagesAnalisis Yfunción de Transferencia Máquina de Corriente Continua SerieMichaelAndréRodasNo ratings yet
- Curso moderno de máquinas eléctricas rotativas. Tomo IV: Máquinas síncronas y motores c.a. de colectorFrom EverandCurso moderno de máquinas eléctricas rotativas. Tomo IV: Máquinas síncronas y motores c.a. de colectorNo ratings yet
- Centrifuga ControlDocument11 pagesCentrifuga ControlALEJANDRA FORERO DUARTENo ratings yet
- Sistema de Propulsión de Un Vehiculo Eléctrico - 24 - Mayo - 2013Document20 pagesSistema de Propulsión de Un Vehiculo Eléctrico - 24 - Mayo - 2013rigo84No ratings yet
- Armónicas en Sistemas Eléctricos IndustrialesFrom EverandArmónicas en Sistemas Eléctricos IndustrialesRating: 4.5 out of 5 stars4.5/5 (12)
- Modelo Matematico de Un Generador SincronoDocument9 pagesModelo Matematico de Un Generador SincronoCristian Paolo0% (1)
- Control automático problemas ingenieríaDocument6 pagesControl automático problemas ingenieríaPaola Sanchez ContrerasNo ratings yet
- LABORATORIO2ROTATIVASDocument17 pagesLABORATORIO2ROTATIVASSAMUEL TOVAR MENDEZNo ratings yet
- Proyecto Motor DCDocument5 pagesProyecto Motor DCMarlon BoknegraNo ratings yet
- Aplic Matlab Motor InduccionDocument10 pagesAplic Matlab Motor InduccionjglunaNo ratings yet
- Modelo Dinamico Del Motor Electrico AsincronoDocument3 pagesModelo Dinamico Del Motor Electrico AsincronoCesar GilNo ratings yet
- Practica 3. Espacio de EstadoDocument21 pagesPractica 3. Espacio de EstadoLUISNo ratings yet
- Modelado de LineasDocument71 pagesModelado de LineasRuben Joaquín Cetina AbreuNo ratings yet
- ESTUDIO CINEMÁTICO Y ESTRUCTURAL DE LAS CAJAS DE VELOCIDADES DE LAS MÁQUINAS HERRAMIENTADocument11 pagesESTUDIO CINEMÁTICO Y ESTRUCTURAL DE LAS CAJAS DE VELOCIDADES DE LAS MÁQUINAS HERRAMIENTADio21No ratings yet
- Nótese Que en Este Diagrama de Bloques El Controlador y Actuador No Tienen Elemento en El Circuito Por Ser Parte de La Primera EntregaDocument8 pagesNótese Que en Este Diagrama de Bloques El Controlador y Actuador No Tienen Elemento en El Circuito Por Ser Parte de La Primera EntregaRoberto CastilloNo ratings yet
- Modelado de Un Motor CCDocument7 pagesModelado de Un Motor CCAle MuakNo ratings yet
- Función de Transferencia de Un Motor de D.CDocument8 pagesFunción de Transferencia de Un Motor de D.CAbel Nohpal BrionesNo ratings yet
- Anexo 8 PDFDocument83 pagesAnexo 8 PDFLINDSAY YANETTE SEPULVEDA SEPULVEDANo ratings yet
- Hoja de Problemas #3 MecánicaDocument5 pagesHoja de Problemas #3 MecánicaFidel Andía GuzmánNo ratings yet
- Parámetros Máquina SincrónicaDocument17 pagesParámetros Máquina SincrónicaAlex SantanderNo ratings yet
- Trabajo Final ElectromecanicaDocument19 pagesTrabajo Final ElectromecanicaJesse MauricioNo ratings yet
- Caracterizacion Dinamica de Un Motor DCDocument8 pagesCaracterizacion Dinamica de Un Motor DCJonnatan RomeroNo ratings yet
- Caracteristicas de Motores de CCDocument10 pagesCaracteristicas de Motores de CCCarlos RodriguezNo ratings yet
- Modelo de motor DC usando diagrama de bloquesDocument20 pagesModelo de motor DC usando diagrama de bloqueshectorNo ratings yet
- Fase3 ModeladoDocument19 pagesFase3 Modeladokevin narvaez henriquezNo ratings yet
- Determinacion Experimental de Los Parametros Necesarios para La Modelacion Matematica de La Maquina Asincronica Trabajando en Regimen de Generador.Document5 pagesDeterminacion Experimental de Los Parametros Necesarios para La Modelacion Matematica de La Maquina Asincronica Trabajando en Regimen de Generador.asantbdjNo ratings yet
- SISTEMAS DINÁMICOS FINAL TERMINADO Etapa 2Document25 pagesSISTEMAS DINÁMICOS FINAL TERMINADO Etapa 2carlospovedaNo ratings yet
- ExF Parte1Document2 pagesExF Parte1m3nriqueNo ratings yet
- Control Dinamico de Una Muñeca de 3 Grados de LibertadDocument7 pagesControl Dinamico de Una Muñeca de 3 Grados de LibertadPiter GonNo ratings yet
- Maquina Correccion PDFDocument36 pagesMaquina Correccion PDFdielcord90No ratings yet
- Modelo Máquina de Inducción TrifasicaDocument22 pagesModelo Máquina de Inducción TrifasicaLuis D. Barrera GamboaNo ratings yet
- Tarea4 Elo386Document6 pagesTarea4 Elo386Bernardo FariasNo ratings yet
- Hoja de Problemas #3 Electrónica PDFDocument6 pagesHoja de Problemas #3 Electrónica PDFFidel Andía GuzmánNo ratings yet
- Diseño de Un Sistema de Control Y Observador de Estado para Una Mano ArticuladaDocument6 pagesDiseño de Un Sistema de Control Y Observador de Estado para Una Mano ArticuladaVacatmNo ratings yet
- Modelado y simulación de sistemas de control mediante SimulinkDocument10 pagesModelado y simulación de sistemas de control mediante Simulinkcarolina abigail jimenez cortezNo ratings yet
- Model Mat Del Motor Aui HayDocument6 pagesModel Mat Del Motor Aui HayMeylin Portocarrero EliasNo ratings yet
- Modelo Dinámico Del Generador Síncrono Trifásico Mediante MatlabDocument7 pagesModelo Dinámico Del Generador Síncrono Trifásico Mediante MatlabHector Guayanlema MartinezNo ratings yet
- Modelado de Sistemas ElectromecánicosMEJORADODocument5 pagesModelado de Sistemas ElectromecánicosMEJORADODiana SanchezNo ratings yet
- Obtención del modelo matemático de un motor DC y análisis de su respuesta y diagramas de BodeDocument8 pagesObtención del modelo matemático de un motor DC y análisis de su respuesta y diagramas de BodeferminNo ratings yet
- 3pc Maquina Eléctricas IIIDocument2 pages3pc Maquina Eléctricas IIIDavid GgmNo ratings yet
- Convertidores PWM DC-DCDocument10 pagesConvertidores PWM DC-DCbastian yoelNo ratings yet
- Estabilidad MultimaquinasDocument24 pagesEstabilidad MultimaquinasSergio Arturo Salazar OlivaNo ratings yet
- Guion Practicas 08 - 09Document65 pagesGuion Practicas 08 - 09jaime_paul20026375No ratings yet
- Sistema de Control de Posicion Motor C.D.Document8 pagesSistema de Control de Posicion Motor C.D.Yoleiba Nava100% (1)
- Modelado, Simulación y Control de Un Motor BLDC Fase IDocument12 pagesModelado, Simulación y Control de Un Motor BLDC Fase IDiego Fernando Sanchez Florez100% (2)
- Modelo Matemático de Un Motor de Corriente ContinuaDocument10 pagesModelo Matemático de Un Motor de Corriente Continuauser1995No ratings yet
- Proyecto ELEL-206Document30 pagesProyecto ELEL-206Cristian Felipe CatrilefNo ratings yet
- FINALLabo2 ControlAvanzado.0Document22 pagesFINALLabo2 ControlAvanzado.0miltonNo ratings yet
- Estabilidad de Sistemas ElectricosDocument15 pagesEstabilidad de Sistemas ElectricosJohn RangelNo ratings yet
- 05 Política Nacional de Programa de JóvenesDocument20 pages05 Política Nacional de Programa de JóvenesJorge A. Perez YebraNo ratings yet
- Campismo Ilustrado Parte 4Document51 pagesCampismo Ilustrado Parte 4Jorge A. Perez YebraNo ratings yet
- Tema - 11 - 02 Ley de Biot-SavartDocument1 pageTema - 11 - 02 Ley de Biot-SavartJorge A. Perez YebraNo ratings yet
- Calculo de Bancos de CondensadoresDocument3 pagesCalculo de Bancos de CondensadoresMarcio CamargoNo ratings yet
- Campismo Ilustrado Parte 1Document50 pagesCampismo Ilustrado Parte 1Jorge A. Perez YebraNo ratings yet
- PolifasicosDocument44 pagesPolifasicoscamilosena100% (3)
- F430-II Umspa0100Document182 pagesF430-II Umspa0100Andres AguileraNo ratings yet
- Campismo Ilustrado Parte 3Document51 pagesCampismo Ilustrado Parte 3Jorge A. Perez YebraNo ratings yet
- Campismo Ilustrado Parte 2Document51 pagesCampismo Ilustrado Parte 2Jorge A. Perez YebraNo ratings yet
- Tema - 11 - 03 Campo Creado Por Un Conductor RectilineoDocument1 pageTema - 11 - 03 Campo Creado Por Un Conductor RectilineoJorge A. Perez YebraNo ratings yet
- Apuntes Circuitos Electricos IDocument15 pagesApuntes Circuitos Electricos IJorge A. Perez YebraNo ratings yet
- Tema - 11 - 01 Fuerza Sobre Un ConductorDocument1 pageTema - 11 - 01 Fuerza Sobre Un ConductorJorge A. Perez YebraNo ratings yet
- Unidad I Parte VDocument40 pagesUnidad I Parte VJorge A. Perez YebraNo ratings yet
- Numeros ComplejosDocument19 pagesNumeros ComplejosKathiusca MarinNo ratings yet
- Unidad I Parte IIDocument23 pagesUnidad I Parte IIJorge A. Perez YebraNo ratings yet
- Unidad I Parte IIIDocument37 pagesUnidad I Parte IIIJorge A. Perez YebraNo ratings yet
- Circuitos eléctricos II: generación y descripción de señales de corriente alternaDocument40 pagesCircuitos eléctricos II: generación y descripción de señales de corriente alternaJorge A. Perez YebraNo ratings yet
- Unidad I Parte IVDocument9 pagesUnidad I Parte IVJorge A. Perez YebraNo ratings yet
- Sector ElectricoDocument227 pagesSector ElectricoRakso ZelaznogNo ratings yet
- Iluminacion Eficiente en Alumbrado - Publico PDFDocument17 pagesIluminacion Eficiente en Alumbrado - Publico PDFJairo H Pinzón CastroNo ratings yet
- Estrategias Sobre CompetenciasDocument10 pagesEstrategias Sobre CompetenciasJorge A. Perez YebraNo ratings yet
- Capitulo 2 KirchoffDocument11 pagesCapitulo 2 KirchoffJorge MonteNo ratings yet
- 06 Didáctica GrupalDocument34 pages06 Didáctica GrupalGermán Iván Martínez100% (6)
- El ColorDocument19 pagesEl ColorJorge A. Perez YebraNo ratings yet
- Estrategias Didácticas Aplicadas A Las Competencias ProfesionalesDocument5 pagesEstrategias Didácticas Aplicadas A Las Competencias ProfesionalesJorge A. Perez YebraNo ratings yet
- Electrotecnia10 1Document12 pagesElectrotecnia10 1Jorge A. Perez YebraNo ratings yet
- Evaluacion Por CompetenciasDocument74 pagesEvaluacion Por CompetenciasJorge A. Perez YebraNo ratings yet
- TAB - Taxonomia de MarzanoDocument1 pageTAB - Taxonomia de MarzanoRosemary L. RamosNo ratings yet
- Manuales de EmbobinadosDocument16 pagesManuales de EmbobinadosJorge A. Perez YebraNo ratings yet
- Motores de Inducción PDFDocument15 pagesMotores de Inducción PDFAdolfo A HerreraNo ratings yet
- Manual Control Remoto EntelDocument2 pagesManual Control Remoto EntelAndres Araneda0% (1)
- Informe Ejecutivo EpmDocument9 pagesInforme Ejecutivo EpmAndrés LópezNo ratings yet
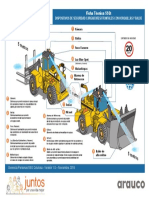
- Ficha Técnica SSO Dispositivos de Seguridad Cargadores Frontales Con Horquillas y BaldeDocument1 pageFicha Técnica SSO Dispositivos de Seguridad Cargadores Frontales Con Horquillas y BaldeCamilo Milo100% (1)
- Guia para La Entrega de Dispositivos A Estudiantes. Nov. 2020Document8 pagesGuia para La Entrega de Dispositivos A Estudiantes. Nov. 2020Arturo JimenesNo ratings yet
- Adicional InvestigacionDocument6 pagesAdicional InvestigacionAna García LópezNo ratings yet
- Diseño de Pendulo Rotacional Invertido.Document4 pagesDiseño de Pendulo Rotacional Invertido.OctavioGarciaNo ratings yet
- Responsabilidades y funciones de supervisión de KarenDocument3 pagesResponsabilidades y funciones de supervisión de KarenRolando SanchezNo ratings yet
- 30 Códigos de Búsqueda en Google Que Debes Conocer - LegionProgramasDocument3 pages30 Códigos de Búsqueda en Google Que Debes Conocer - LegionProgramasmargierNo ratings yet
- Dat HD Boss 790 Long Range149741 Lanzamiento - Es-1Document2 pagesDat HD Boss 790 Long Range149741 Lanzamiento - Es-1miniNo ratings yet
- Lógica jurídica y construcción de sentenciasDocument2 pagesLógica jurídica y construcción de sentenciasJhaydy Saldaña MuñozNo ratings yet
- Herramientas de Calidad SIRDocument59 pagesHerramientas de Calidad SIRjuanvg88100% (1)
- Seminario GestionDocument5 pagesSeminario GestionBetzaida AtenasNo ratings yet
- Estudio de satisfacción de clientes en fabricante de electrodomésticosDocument5 pagesEstudio de satisfacción de clientes en fabricante de electrodomésticosBrenda MoralesNo ratings yet
- Informacion Ingles 1 PDFDocument15 pagesInformacion Ingles 1 PDFJose Tomas Vergara DiazNo ratings yet
- Variables de Secretaria de TransitoDocument3 pagesVariables de Secretaria de TransitoAngie MejiaNo ratings yet
- Zabala Berrios Carlos Inf7 Vaciocorto-1Document21 pagesZabala Berrios Carlos Inf7 Vaciocorto-1Erbin C EspinozaNo ratings yet
- Caldera YCRTDocument9 pagesCaldera YCRTOPISantaCruzNo ratings yet
- Normas APA Modulo Fundamentacion TeoricaDocument57 pagesNormas APA Modulo Fundamentacion Teoricacmauriciohn100% (1)
- Elaboración de Sistema de Control para Farmacia AlofarmaDocument30 pagesElaboración de Sistema de Control para Farmacia AlofarmaAntuanetNo ratings yet
- Instalaciones hidráulicas y sanitarias del Edificio MayaDocument47 pagesInstalaciones hidráulicas y sanitarias del Edificio MayaLuis Ceciliano50% (2)
- Por Que Debemos Estudiar La PolíticaDocument11 pagesPor Que Debemos Estudiar La PolíticaJhesus Garcia75% (4)
- Gestión de Usuarios y PermisosDocument4 pagesGestión de Usuarios y PermisosJoséMaríaSerranoSánchezNo ratings yet
- JunaebDocument118 pagesJunaebAndrés Araneda VásquezNo ratings yet
- Electro Neumática (Ejercicios 1-17)Document26 pagesElectro Neumática (Ejercicios 1-17)Jaime Muñoz100% (1)
- 003 Configuración MicrófonoDocument27 pages003 Configuración MicrófonoJAMU19940% (1)
- El Diseño Educativo Como Sistema de Enseñanza AprendizajeDocument21 pagesEl Diseño Educativo Como Sistema de Enseñanza AprendizajeJuan Alexander Flores FloresNo ratings yet
- Casa FarnsWorth MiesDocument3 pagesCasa FarnsWorth MiesluciaNo ratings yet
- Informe de AlgebraDocument8 pagesInforme de AlgebraCristhian DayalNo ratings yet
- KendallDocument11 pagesKendallLucita PinedoNo ratings yet
- TAREA-Caso Practico 1 Ingeniería Ambiental Legislacion A EnviadoDocument2 pagesTAREA-Caso Practico 1 Ingeniería Ambiental Legislacion A EnviadoJulissa FeijooNo ratings yet