You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Jesper Kyd - Flight Over Venice (Assassin's Creed II)Document9 pagesJesper Kyd - Flight Over Venice (Assassin's Creed II)Aldert de VriesNo ratings yet
- Design of Electrical Machines NotesDocument24 pagesDesign of Electrical Machines Notesmadhes14No ratings yet
- Spring 2010 MidTerm OPKST CS101 Bc100200572Document6 pagesSpring 2010 MidTerm OPKST CS101 Bc100200572cs619finalproject.comNo ratings yet
- KrautKramer DM4E DM4DL - ManualDocument38 pagesKrautKramer DM4E DM4DL - ManualfdsgfdgNo ratings yet
- WEEK 11 - LAB 2 LEVEL 0 - BS Lab Electrical Supply - Domestic House Wiring & Accessories Including Lighting - DONEDocument6 pagesWEEK 11 - LAB 2 LEVEL 0 - BS Lab Electrical Supply - Domestic House Wiring & Accessories Including Lighting - DONEMuhd Alif MikhailNo ratings yet
- The Child's Learning of English Morphology: WORDDocument29 pagesThe Child's Learning of English Morphology: WORDCatnis TomNo ratings yet
- Advanced Communication SystemDocument13 pagesAdvanced Communication SystemZohaib AhmadNo ratings yet
- Module - 5Document92 pagesModule - 5Anand ANo ratings yet
- Detector Demetales Manuel 103Document6 pagesDetector Demetales Manuel 103wilfredoNo ratings yet
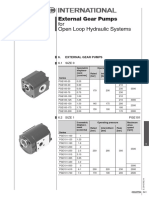
- External Gear Pumps For Open Loop Hydraulic SystemsDocument2 pagesExternal Gear Pumps For Open Loop Hydraulic SystemsBlashko GjorgjievNo ratings yet
- Jurnal Ari Maulana Ullum Sasmi 1801038Document12 pagesJurnal Ari Maulana Ullum Sasmi 180103803. Ari Maulana Ullum Sasmi / TD 2.10No ratings yet
- 3PM - Project Management Method - Sales MessagingDocument5 pages3PM - Project Management Method - Sales Messagingberuang kutubNo ratings yet
- Technical Bulletin: ConditionDocument11 pagesTechnical Bulletin: ConditionFrancoNo ratings yet
- TGA Interpretation of Data, Sources of ErrorDocument28 pagesTGA Interpretation of Data, Sources of ErrorUsman GhaniNo ratings yet
- Refinery Workbook ExerciseDocument54 pagesRefinery Workbook ExerciseHarshit SharmaNo ratings yet
- Language Focus. Past Simple or Past ContinuousDocument3 pagesLanguage Focus. Past Simple or Past ContinuoustotydnrNo ratings yet
- h2s Naoh Equilibrium CurveDocument22 pagesh2s Naoh Equilibrium Curvesmartleo_waloNo ratings yet
- 1 Ha Cabbages - May 2018 PDFDocument1 page1 Ha Cabbages - May 2018 PDFMwai EstherNo ratings yet
- Purposive Communication NotesDocument33 pagesPurposive Communication NotesAlexis DapitoNo ratings yet
- Alpha 20 TDS (EN) 100063006 1Document5 pagesAlpha 20 TDS (EN) 100063006 1Ariel Gallardo Galaz100% (1)
- Cloud Computing 101 TutorialDocument203 pagesCloud Computing 101 TutorialYunis Iklil100% (1)
- Lesson 15 Validity of Measurement and Reliability PDFDocument3 pagesLesson 15 Validity of Measurement and Reliability PDFMarkChristianRobleAlmazanNo ratings yet
- Siasun Company IntroDocument34 pagesSiasun Company IntromoneeshveeraNo ratings yet
- An Introduction To Formal Language and Automata Solution Manual PDFDocument4 pagesAn Introduction To Formal Language and Automata Solution Manual PDFAsad IkramNo ratings yet
- Bollard Pull Calculations For Towing OperationsDocument8 pagesBollard Pull Calculations For Towing OperationsDiegoNo ratings yet
- ABAP On HANA TopicsDocument23 pagesABAP On HANA Topicsrupesh kumarNo ratings yet
- Omnifocus ShortcutsDocument3 pagesOmnifocus ShortcutsLaGouloueNo ratings yet
- Module 4 - Community Health AssessmentDocument8 pagesModule 4 - Community Health AssessmentSteffi100% (1)
- University of Central Punjab: Object Oriented ProgrammingDocument3 pagesUniversity of Central Punjab: Object Oriented ProgrammingChoudhary MuneebNo ratings yet
- Pilot Implementation of The Limited Face-to-Face Class Program at Librada Avelino Elementary SchoolDocument10 pagesPilot Implementation of The Limited Face-to-Face Class Program at Librada Avelino Elementary SchoolCher GeriNo ratings yet