You might also like
- A Tank-To-wheel Analysis Tool For Energy and Emissions Studies in Road VehiclesDocument7 pagesA Tank-To-wheel Analysis Tool For Energy and Emissions Studies in Road VehiclesMuhammad Imran KhanNo ratings yet
- Evaluation of Artificial Neural Network Performance in Diesel EngineDocument12 pagesEvaluation of Artificial Neural Network Performance in Diesel EngineSuper ManNo ratings yet
- 743-Article Text-5211-1-10-20240118Document15 pages743-Article Text-5211-1-10-20240118coin coinNo ratings yet
- Amt 14 769 2021Document15 pagesAmt 14 769 2021Amaechi InnocentNo ratings yet
- CO2 EmissionsDocument7 pagesCO2 EmissionsIulianNo ratings yet
- The Application of The CO2MPAS Model For Vehicle CO2 Emissions Estimation Over Real Traffic ConditionsDocument8 pagesThe Application of The CO2MPAS Model For Vehicle CO2 Emissions Estimation Over Real Traffic ConditionsEdwin SilvaNo ratings yet
- CFD Monte Carlo Simulation of Nitrogen Oxides Dispersion From A Vehicular Exhaust Plume and Its Sensitivity Studies PDFDocument11 pagesCFD Monte Carlo Simulation of Nitrogen Oxides Dispersion From A Vehicular Exhaust Plume and Its Sensitivity Studies PDFmojicapNo ratings yet
- Transportation Research Part D: Hanna Larsson, Eva EricssonDocument6 pagesTransportation Research Part D: Hanna Larsson, Eva EricssonsigitNo ratings yet
- (12-19) Manuscript - PCA Vehicle Emission Inventory-FormatDocument8 pages(12-19) Manuscript - PCA Vehicle Emission Inventory-FormatShayan AbagnaleNo ratings yet
- Proposal FypDocument5 pagesProposal Fypnaien89100% (1)
- Nanoparticle Exposure in Vehicle CabinsDocument5 pagesNanoparticle Exposure in Vehicle Cabins11751175No ratings yet
- CART-BMARS hybrid models improve vehicular emissions predictionDocument15 pagesCART-BMARS hybrid models improve vehicular emissions predictionRosmeryCarhuazYaroNo ratings yet
- Measurement, Evaluation and Minimization of Vehicle Emissions in Time Dependent RoutingDocument24 pagesMeasurement, Evaluation and Minimization of Vehicle Emissions in Time Dependent RoutingAngélica MoralesNo ratings yet
- Applied Energy: Fredy Rosero, Natalia Fonseca, Jos E-María L Opez, Jesús CasanovaDocument17 pagesApplied Energy: Fredy Rosero, Natalia Fonseca, Jos E-María L Opez, Jesús CasanovaLuciana FigueiredoNo ratings yet
- Automotive Catalytic Converter Design OptimizationDocument13 pagesAutomotive Catalytic Converter Design OptimizationLlan Rose TagacayNo ratings yet
- Case Studies in Thermal EngineeringDocument13 pagesCase Studies in Thermal EngineeringEduardo MercadoNo ratings yet
- Size Distributions of Motor Vehicle Exhaust PM A Comparison Between ELPI and SMPS MeasurementsDocument23 pagesSize Distributions of Motor Vehicle Exhaust PM A Comparison Between ELPI and SMPS Measurementsrubens.pereiraNo ratings yet
- Comparative Studies Exhaust Emissions of The EuroDocument6 pagesComparative Studies Exhaust Emissions of The EuroGaniyuNo ratings yet
- Barbes L..Document7 pagesBarbes L..electrotehnicaNo ratings yet
- Air Dispersion Mode 2Document11 pagesAir Dispersion Mode 2Tayyab AkhlassNo ratings yet
- Assessing The Impact of Bus Technology On Greenhouses GasDocument5 pagesAssessing The Impact of Bus Technology On Greenhouses GaspionitroNo ratings yet
- Recommendations & ConclusionDocument3 pagesRecommendations & ConclusionalyaNo ratings yet
- Ecopassenger: Environmental Methodology and Data Update 2016Document28 pagesEcopassenger: Environmental Methodology and Data Update 2016sebas barbsoaNo ratings yet
- A Review of Vehicular Emission ModelsDocument12 pagesA Review of Vehicular Emission ModelsTamojit GhoshNo ratings yet
- RailwayDocument17 pagesRailwayshymaa elbakryNo ratings yet
- Characterizing The Effects of Driver Variability On Real-World Vehicle EmissionsDocument13 pagesCharacterizing The Effects of Driver Variability On Real-World Vehicle EmissionstechwhoreNo ratings yet
- Comparison of Vehicle Exhaust Particle Size Distributions Measured by SMPS and EEPS During Steady State ConditionsDocument14 pagesComparison of Vehicle Exhaust Particle Size Distributions Measured by SMPS and EEPS During Steady State ConditionsDharmeswar SahNo ratings yet
- Real-World Comparison of Probe Vehicle Emissions and Fuel Consumption Using Diesel and 5% Biodiesel (B5) BlendDocument18 pagesReal-World Comparison of Probe Vehicle Emissions and Fuel Consumption Using Diesel and 5% Biodiesel (B5) BlendSurrean RaoNo ratings yet
- A Modelling System For Predicting Urban Air PollutDocument12 pagesA Modelling System For Predicting Urban Air PollutAleks Guevara PalaciosNo ratings yet
- A Bottom-Up Methodology To Estimate Vehicle Emissions For The Beijing Urban AreaDocument7 pagesA Bottom-Up Methodology To Estimate Vehicle Emissions For The Beijing Urban AreaMuhammad Imran KhanNo ratings yet
- COPERT Australia: A New Software To Estimate Vehicle Emissions in AustraliaDocument11 pagesCOPERT Australia: A New Software To Estimate Vehicle Emissions in AustraliaNikhil ahireNo ratings yet
- Impact of Stops On Vehicle Fuel Consumption and emDocument18 pagesImpact of Stops On Vehicle Fuel Consumption and emPaolo Angelo GutierrezNo ratings yet
- Tracking Field OperationsDocument9 pagesTracking Field OperationsWilberZangaNo ratings yet
- I Jer 4721324153800Document10 pagesI Jer 4721324153800Gandhi Pmk PillaiNo ratings yet
- Monteiro2009 Article SustainabilityMetricsForEco-teDocument6 pagesMonteiro2009 Article SustainabilityMetricsForEco-teIscienceNo ratings yet
- Diesel PollDocument8 pagesDiesel PollAndrei PirvanNo ratings yet
- 10 - Emissions Mes ModDocument46 pages10 - Emissions Mes ModgkarthikeyanNo ratings yet
- Exhaust Emissions From Four Stroke Lawn Mower EnginesDocument9 pagesExhaust Emissions From Four Stroke Lawn Mower EnginesIZZAT ISYRAF IZZ BIN SHAROLRIZAL STUDENTNo ratings yet
- GHG Literature ReviewDocument4 pagesGHG Literature ReviewBASIT ABDULNo ratings yet
- 2004 - Rakha - Development of VT-Micro Model For Estimating EmissionsDocument26 pages2004 - Rakha - Development of VT-Micro Model For Estimating EmissionssofiaNo ratings yet
- Multi-Objective Optimization of Aircraft Design For Emission and Cost ReductionsDocument9 pagesMulti-Objective Optimization of Aircraft Design For Emission and Cost ReductionsPraveeNo ratings yet
- Climate Projection Over Indonesia Based On The Total Fossil Fuel Co Emission Prediction Using The Box-Jenkins Arima ModelDocument10 pagesClimate Projection Over Indonesia Based On The Total Fossil Fuel Co Emission Prediction Using The Box-Jenkins Arima ModelEronika HarianjaNo ratings yet
- Focus: Methodology For Estimating Greenhouse Gas and Air Pollutant Emissions Related To Road NetworksDocument4 pagesFocus: Methodology For Estimating Greenhouse Gas and Air Pollutant Emissions Related To Road NetworksRonald GeorgeNo ratings yet
- IJETR032163Document5 pagesIJETR032163erpublicationNo ratings yet
- Study On Prediction of The Effects of Design and Operating Parameters On NO Emissions From A Leanburn Natural Gas EngineDocument15 pagesStudy On Prediction of The Effects of Design and Operating Parameters On NO Emissions From A Leanburn Natural Gas Engineprasaad08No ratings yet
- Remote Vehicle Emission Monitoring SystemDocument5 pagesRemote Vehicle Emission Monitoring SystemNitish GauravNo ratings yet
- Atmospheric Environment: Sarath K. Guttikunda, Giuseppe CaloriDocument11 pagesAtmospheric Environment: Sarath K. Guttikunda, Giuseppe CaloriEitavitaza Arzahzarah WillandNo ratings yet
- The ARTEMIS European Driving Cycles For MeasuringDocument12 pagesThe ARTEMIS European Driving Cycles For MeasuringSatyajit MondalNo ratings yet
- My Published Paper 1Document7 pagesMy Published Paper 1Badadmasi MaiwdaNo ratings yet
- Areas of R&D and Consultancy / Core Activities Areas of R&D: Transport Planning & Environment DivisionDocument10 pagesAreas of R&D and Consultancy / Core Activities Areas of R&D: Transport Planning & Environment DivisionVasav DubeyNo ratings yet
- Transportation Research Part D: Guihua Wang, Song Bai, Joan M. OgdenDocument12 pagesTransportation Research Part D: Guihua Wang, Song Bai, Joan M. OgdenJose DenizNo ratings yet
- Catalytic Converter CFD Using COMSOLDocument10 pagesCatalytic Converter CFD Using COMSOLKulaNo ratings yet
- A Comprehensive and Systematic Modelling Tool For Natural Gas Value Chain Greenhouse Gas Emissions QuantificationDocument7 pagesA Comprehensive and Systematic Modelling Tool For Natural Gas Value Chain Greenhouse Gas Emissions QuantificationniezhenggangNo ratings yet
- Wang - Comparing Air Quality Impacts of Hydrogen and GasolineDocument13 pagesWang - Comparing Air Quality Impacts of Hydrogen and GasolineMeelan07No ratings yet
- Impact of ETC and e-screening on heavy-duty vehicle emissionsDocument11 pagesImpact of ETC and e-screening on heavy-duty vehicle emissionsJobaer Al-MahmudNo ratings yet
- Science of The Total Environment: Research PaperDocument11 pagesScience of The Total Environment: Research PaperHriday GoelNo ratings yet
- Science of The Total Environment: Georgios Fontaras, Vicente Franco, Panagiota Dilara, Giorgio Martini, Urbano ManfrediDocument9 pagesScience of The Total Environment: Georgios Fontaras, Vicente Franco, Panagiota Dilara, Giorgio Martini, Urbano ManfrediDigna Bettin CuelloNo ratings yet
- Kakouei2012 Co2 Emission (Journal)Document5 pagesKakouei2012 Co2 Emission (Journal)Nithish ChavvaNo ratings yet
- Carbon Capture Technologies for Gas-Turbine-Based Power PlantsFrom EverandCarbon Capture Technologies for Gas-Turbine-Based Power PlantsNo ratings yet
- Prop. Petrol Diesel Viscosity @40oc Sp. Gravity Calorific Value (KJ/KG) Flash Point ©Document14 pagesProp. Petrol Diesel Viscosity @40oc Sp. Gravity Calorific Value (KJ/KG) Flash Point ©Kumar GauravNo ratings yet
- Z'R'O2Document10 pagesZ'R'O2Kumar GauravNo ratings yet
- 5 X 7 In. PDFDocument1 page5 X 7 In. PDFKumar GauravNo ratings yet
- Revised Figs of ANFISDocument3 pagesRevised Figs of ANFISKumar GauravNo ratings yet
- Neural Network Tool Box Operation in MATLABDocument4 pagesNeural Network Tool Box Operation in MATLABKumar GauravNo ratings yet
- Apply for admission to community collegeDocument3 pagesApply for admission to community collegeKumar GauravNo ratings yet
- Effect of injection parameters on performance and emissions of biodiesel-fueled engineDocument14 pagesEffect of injection parameters on performance and emissions of biodiesel-fueled engineKumar GauravNo ratings yet
- Fractional Factorial With Foldover Tutorial: DX8 03C Foldover - Docx Rev. 6/7/10Document22 pagesFractional Factorial With Foldover Tutorial: DX8 03C Foldover - Docx Rev. 6/7/10Kumar GauravNo ratings yet
- Fractional Factorial With Foldover Tutorial: DX8 03C Foldover - Docx Rev. 6/7/10Document22 pagesFractional Factorial With Foldover Tutorial: DX8 03C Foldover - Docx Rev. 6/7/10Kumar GauravNo ratings yet
- Jagannath B. Hirkude, Atul S. Padalkar: HighlightsDocument8 pagesJagannath B. Hirkude, Atul S. Padalkar: HighlightsKumar GauravNo ratings yet
- Neural Network, Sewage TreatmentDocument10 pagesNeural Network, Sewage TreatmentKumar GauravNo ratings yet
- Revised Figs of ANFISDocument3 pagesRevised Figs of ANFISKumar GauravNo ratings yet
- MKRay 0Document11 pagesMKRay 0Kumar GauravNo ratings yet
- A154 M19 ChallanDocument1 pageA154 M19 ChallanKumar GauravNo ratings yet
- Fuzzy TheoryDocument13 pagesFuzzy TheoryKumar GauravNo ratings yet
- Fdi in Retail Sector in IndiaDocument4 pagesFdi in Retail Sector in IndiaKumar GauravNo ratings yet
- A Simple Method For Production of Pure Silica From Rice Hull AshDocument6 pagesA Simple Method For Production of Pure Silica From Rice Hull Ashzeolite_naturalNo ratings yet
- A 234 K 72 ApplicationDocument2 pagesA 234 K 72 ApplicationAmit RathaurNo ratings yet
- State Bank of India PDFDocument1 pageState Bank of India PDFKumar GauravNo ratings yet
- EnvironmentalDocument14 pagesEnvironmentalKumar GauravNo ratings yet
- Ann Best 1Document15 pagesAnn Best 1Kumar GauravNo ratings yet
- Cherubini - Crop Residues As Raw Materials For Biorefinery Systems - A LCA Case StudyDocument11 pagesCherubini - Crop Residues As Raw Materials For Biorefinery Systems - A LCA Case StudyGuiping HuNo ratings yet
- Ee IIDocument7 pagesEe IIKumar GauravNo ratings yet
- Kurlansky PDFDocument6 pagesKurlansky PDFKumar GauravNo ratings yet
- Ee IIDocument7 pagesEe IIKumar GauravNo ratings yet
- Air Pol Aero Paper USstyleDocument15 pagesAir Pol Aero Paper USstyleKumar GauravNo ratings yet
- Amit-Sample TestingDocument2 pagesAmit-Sample TestingKumar GauravNo ratings yet
- Affidavit by StudentDocument1 pageAffidavit by StudentKumar GauravNo ratings yet
- Affidavit by The Parent/GuardianDocument1 pageAffidavit by The Parent/GuardianKumar GauravNo ratings yet
- SAGDrilDocument8 pagesSAGDrilLoganBohannonNo ratings yet
- Micra Kv4 Kv6Document4 pagesMicra Kv4 Kv6Mohamed Anouar BidaNo ratings yet
- 10.-EPRI-NMAC - HVAC Testing, Adjunsting and Balancing Guideline PDFDocument224 pages10.-EPRI-NMAC - HVAC Testing, Adjunsting and Balancing Guideline PDFaldeanucuNo ratings yet
- Ready Made RC Car SchematicDocument3 pagesReady Made RC Car SchematicybyDgreat jbNo ratings yet
- Smart Grid in IndiaDocument17 pagesSmart Grid in Indiatejomayi100% (1)
- FAB AMT2101 PRELIM MODULE No.1 PDFDocument29 pagesFAB AMT2101 PRELIM MODULE No.1 PDFHanz AlecNo ratings yet
- TriScroll 300 Series Dry Scroll Vacuum Pump PDFDocument106 pagesTriScroll 300 Series Dry Scroll Vacuum Pump PDFWilliamRiveraNo ratings yet
- Behaviour of Continuous Pipeline Subject To Transverse PGD: Xuejie Liu S and Michael J. O'RourketDocument15 pagesBehaviour of Continuous Pipeline Subject To Transverse PGD: Xuejie Liu S and Michael J. O'RourketMarcelo Andrés Rojas GonzálezNo ratings yet
- A2vk PDFDocument10 pagesA2vk PDFMohar SinghNo ratings yet
- Steam Generator HDocument2 pagesSteam Generator HNoor NoorNo ratings yet
- NIT for EPC Bidding of Coal Fired Power ProjectDocument9 pagesNIT for EPC Bidding of Coal Fired Power ProjectLavu Anil ChowdaryNo ratings yet
- Why Is The Sky BlueDocument2 pagesWhy Is The Sky BlueTongboNo ratings yet
- Climate Change EssayDocument2 pagesClimate Change EssaySammNo ratings yet
- Lecture 7 8 Synchronous MotorDocument19 pagesLecture 7 8 Synchronous MotorCHATHURA MADURANGANo ratings yet
- Led Taxi Light TestingDocument2 pagesLed Taxi Light Testingajaydce05No ratings yet
- Wave Optics SolutionsDocument26 pagesWave Optics SolutionsAjay AgrawalNo ratings yet
- FP 238Document32 pagesFP 238Mahmoud Atia100% (2)
- CSE Engineering Course DetailsDocument233 pagesCSE Engineering Course DetailsVenkatesh Kumar0% (1)
- Somayya Polytechnic, Wadgaon, Chandrapur Department of Mining and Mine Surveying 2 Year - Subject Notes Subject: Mine Ventilation Unit: 01 - Mine AirDocument136 pagesSomayya Polytechnic, Wadgaon, Chandrapur Department of Mining and Mine Surveying 2 Year - Subject Notes Subject: Mine Ventilation Unit: 01 - Mine AirMayur BawaneNo ratings yet
- Literature ReviewDocument18 pagesLiterature ReviewRaymond Manalo Panganiban100% (1)
- Eurosun2014-Proceedings - ImportentDocument1,524 pagesEurosun2014-Proceedings - ImportentAkhileshkumar PandeyNo ratings yet
- Availability Based Tariff PDFDocument8 pagesAvailability Based Tariff PDFakshay jawaleNo ratings yet
- 0-1-DEBRIEFING-Ca'c 1, Cal'c 2 and Fluid-StudentsDocument2 pages0-1-DEBRIEFING-Ca'c 1, Cal'c 2 and Fluid-StudentsPaul Philip LabitoriaNo ratings yet
- Válvulas Jamesbury Buterfly Valve For SteamDocument8 pagesVálvulas Jamesbury Buterfly Valve For SteamFelipe Ribeiro da CostaNo ratings yet
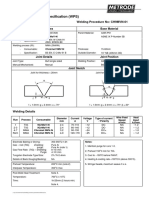
- Welding Procedure Specification (WPS)Document6 pagesWelding Procedure Specification (WPS)Mohamad Marwan HamwiNo ratings yet
- Field Bus CommunicationDocument30 pagesField Bus CommunicationArun KumarNo ratings yet
- WILMAR™ Protective Relays - 1800 SeriesDocument2 pagesWILMAR™ Protective Relays - 1800 SeriesmateusT850No ratings yet
- Dental Polymers GuideDocument117 pagesDental Polymers GuideLalit KumarNo ratings yet
- Hex1 Specification SheetDocument2 pagesHex1 Specification SheetMoodNo ratings yet