
You might also like
- Passivity and ComplementarityDocument33 pagesPassivity and ComplementarityRubén de los Santos ReyesNo ratings yet
- Dead Beat Observer Synthesis: Maria Elena Valcher, Jan C. WillemsDocument8 pagesDead Beat Observer Synthesis: Maria Elena Valcher, Jan C. WillemsDaniel De Matos SilvestreNo ratings yet
- On Quadratic Differential FormsDocument47 pagesOn Quadratic Differential Formspawanhv1454No ratings yet
- Distributed ContDocument7 pagesDistributed ContBaba JeeNo ratings yet
- Controllability and State Feedback Stabilizability of Non HolonoDocument19 pagesControllability and State Feedback Stabilizability of Non HolonoExequiel RemersaroNo ratings yet
- Complex and Gradient OperatorDocument74 pagesComplex and Gradient Operatorjimmie doyleNo ratings yet
- Algorithms For Acyclic Datarase Schemes: Mihalis YannakakisDocument13 pagesAlgorithms For Acyclic Datarase Schemes: Mihalis YannakakisHoc Nguyen VanNo ratings yet
- Properties of Nonlinear Systems and Convergence of The Newton-Raphson Method in Geometric Constraint SolvingDocument20 pagesProperties of Nonlinear Systems and Convergence of The Newton-Raphson Method in Geometric Constraint SolvingLucas SantosNo ratings yet
- A Necessary Relation Algebra For Mereotopology: Ivo Düntsch Gunther Schmidt, Michael WinterDocument26 pagesA Necessary Relation Algebra For Mereotopology: Ivo Düntsch Gunther Schmidt, Michael Wintervladimirkulf2142No ratings yet
- Lectures On Dynamic Systems and Control MITDocument320 pagesLectures On Dynamic Systems and Control MITNoa Noa ReyNo ratings yet
- Force/Motion Control of Constrained Robots Using Sliding ModeDocument5 pagesForce/Motion Control of Constrained Robots Using Sliding ModeHaider NeamaNo ratings yet
- Optimal Control TheoryDocument28 pagesOptimal Control TheoryDaniel WangNo ratings yet
- Passivity-Based Output Synchronization of Networked Euler-Lagrange Systems Subject To Nonholonomic ConstraintsDocument6 pagesPassivity-Based Output Synchronization of Networked Euler-Lagrange Systems Subject To Nonholonomic ConstraintsSumeet SatputeNo ratings yet
- Nonlinear and Adaptive Control: An Abbreviated Status ReportDocument15 pagesNonlinear and Adaptive Control: An Abbreviated Status ReportOwais KhanNo ratings yet
- Q. 1. Define Z-Transform of A Discrete Time Signal. Ans. The Z-Transform of A Discrete Time Signal X (N)Document19 pagesQ. 1. Define Z-Transform of A Discrete Time Signal. Ans. The Z-Transform of A Discrete Time Signal X (N)Mirbaz PathanNo ratings yet
- Chapter 09Document14 pagesChapter 09Son TranNo ratings yet
- Requisite Variety and Its Implications For The Control of Complex Systems (Ashby)Document13 pagesRequisite Variety and Its Implications For The Control of Complex Systems (Ashby)telecultNo ratings yet
- Shrinkage Regression: Rolf Sundberg Volume 4, PP 1994-1998 inDocument5 pagesShrinkage Regression: Rolf Sundberg Volume 4, PP 1994-1998 inMiguel Angel Gonzalez VargasNo ratings yet
- Learning To Rank With Bregman Divergences and Monotone RetargetingDocument10 pagesLearning To Rank With Bregman Divergences and Monotone RetargetingDeborah Bassi SternNo ratings yet
- Trabalho Condicao SetorDocument5 pagesTrabalho Condicao SetorEsmael FloresNo ratings yet
- EE731 Lecture Notes: Matrix Computations For Signal ProcessingDocument21 pagesEE731 Lecture Notes: Matrix Computations For Signal ProcessingKuruvachan K GeorgeNo ratings yet
- Gaskin MechanicsDocument47 pagesGaskin MechanicsLia MewwNo ratings yet
- Doyle 1978Document2 pagesDoyle 1978mayankgarg333No ratings yet
- Klaus Sutner - de Bruijn Graphs and Linear Cellular AutomataDocument12 pagesKlaus Sutner - de Bruijn Graphs and Linear Cellular AutomataIrokkNo ratings yet
- Dynamic Programming and Stochastic Control Processes: Ici-L RD Bellm AnDocument12 pagesDynamic Programming and Stochastic Control Processes: Ici-L RD Bellm AnArturo ReynosoNo ratings yet
- Z TransformDocument10 pagesZ TransformSuvra PattanayakNo ratings yet
- Gerdts Et Al Path Planning NACO 2-3-437-463 2012Document27 pagesGerdts Et Al Path Planning NACO 2-3-437-463 2012Petru G.No ratings yet
- 1210 6261v1 PDFDocument8 pages1210 6261v1 PDFVasquez JCNo ratings yet
- Inverse Synchronization of Coupled Fractional-Order Systems Through Open-Plus-Closed-Loop ControlDocument12 pagesInverse Synchronization of Coupled Fractional-Order Systems Through Open-Plus-Closed-Loop Controllanoke9980No ratings yet
- Pedestrian Flows and Nonclassical ShocksDocument17 pagesPedestrian Flows and Nonclassical ShocksmmhortaNo ratings yet
- Complete Quadratic Lyapunov Functionals Using Bessel LegendreInequalityDocument6 pagesComplete Quadratic Lyapunov Functionals Using Bessel LegendreInequalityVictor Manuel López MazariegosNo ratings yet
- Systems & Control Letters: Peng Lin, Kaiyu Qin, Zhongkui Li, Wei RenDocument8 pagesSystems & Control Letters: Peng Lin, Kaiyu Qin, Zhongkui Li, Wei Renlahoucine1984No ratings yet
- Barrier Option Pricing For Assets With Markov-Modulated DividendsDocument15 pagesBarrier Option Pricing For Assets With Markov-Modulated DividendsddcvNo ratings yet
- End-Effector Trajectory Tracking in Flexible Arms Comparison of Approaches Based On Regulation TheoryDocument17 pagesEnd-Effector Trajectory Tracking in Flexible Arms Comparison of Approaches Based On Regulation Theoryoscar201140No ratings yet
- Cartesian Impedance Control of Redundant Robots: Recent Results With The DLR-Light-Weight-ArmsDocument6 pagesCartesian Impedance Control of Redundant Robots: Recent Results With The DLR-Light-Weight-ArmsByron Xavier Lima CedilloNo ratings yet
- Gord Is 1979Document12 pagesGord Is 1979NixonNo ratings yet
- Necessary and Su Controllability of Fractional Linear Systems Via C SemigroupsDocument10 pagesNecessary and Su Controllability of Fractional Linear Systems Via C SemigroupsVladimir BecejacNo ratings yet
- Lin PR Dyn Sys 2Document45 pagesLin PR Dyn Sys 2Mohamed AbdalmoatyNo ratings yet
- Order of Residual Generators - Bounds and Algorithms Erik FriskDocument6 pagesOrder of Residual Generators - Bounds and Algorithms Erik FriskNeo SebicoNo ratings yet
- Linear Algebra and Robot Modeling: 1 Basic Kinematic EquationsDocument9 pagesLinear Algebra and Robot Modeling: 1 Basic Kinematic EquationsAbdur HamzahNo ratings yet
- Feedback Linearization and Driftless Systems: Philippe MARTIN Pierre ROUCHON November 1994, To Appear in MCSSDocument22 pagesFeedback Linearization and Driftless Systems: Philippe MARTIN Pierre ROUCHON November 1994, To Appear in MCSSRaúl CortésNo ratings yet
- Fault Tolerant Process Control c2Document21 pagesFault Tolerant Process Control c2augur886No ratings yet
- Lagrange Housner HudsonDocument60 pagesLagrange Housner HudsonDanielMontesdeocaNo ratings yet
- Completeness of The System of Root Functions Of: q-Sturm-Liouville OperatorsDocument9 pagesCompleteness of The System of Root Functions Of: q-Sturm-Liouville OperatorsShafiq Ahmed ShahbazNo ratings yet
- Ultraviolet Divergences in Cosmological Correlations: Electronic Address: Weinberg@physics - Utexas.eduDocument26 pagesUltraviolet Divergences in Cosmological Correlations: Electronic Address: Weinberg@physics - Utexas.edusatyabashaNo ratings yet
- Representation of A Vehicular Traffic Model Using Hybrid SystemsDocument22 pagesRepresentation of A Vehicular Traffic Model Using Hybrid Systemscero9794041No ratings yet
- Intro Particle SystemsDocument56 pagesIntro Particle Systemsab cNo ratings yet
- Handout 1Document16 pagesHandout 1Chadwick BarclayNo ratings yet
- 2003 Robotica03Document12 pages2003 Robotica03Raj KanoriaNo ratings yet
- (A) Personal Details Role Name Affiliation: Introduction To Bivariate Linear Regression AnalysisDocument10 pages(A) Personal Details Role Name Affiliation: Introduction To Bivariate Linear Regression AnalysisNeha MishraNo ratings yet
- N MPC 56 PassivityDocument12 pagesN MPC 56 PassivityBRIDGET AUHNo ratings yet
- Chaos in The Fractional Order Lorenz SystemDocument10 pagesChaos in The Fractional Order Lorenz Systemi.ethemsacuNo ratings yet
- SdarticleDocument9 pagesSdarticleSachin KumarNo ratings yet
- Investigating Complex Networks With Inverse ModelsDocument8 pagesInvestigating Complex Networks With Inverse ModelsDemian PereiraNo ratings yet
- 16 - Central Force Motion PDFDocument21 pages16 - Central Force Motion PDFUltrazordNo ratings yet
- Eliminating Oscillation Between Parallel MnosfetsDocument6 pagesEliminating Oscillation Between Parallel MnosfetsCiprian BirisNo ratings yet
- Analysis of LaminatedDocument31 pagesAnalysis of LaminatedKaustubh JadhavNo ratings yet
- Igcse Revision BookDocument23 pagesIgcse Revision BookJo Patrick100% (2)
- Frontinus - Water Management of RomeDocument68 pagesFrontinus - Water Management of RomezElfmanNo ratings yet
- #Dr. Lora Ecg PDFDocument53 pages#Dr. Lora Ecg PDFمحمد زينNo ratings yet
- Active Faults in MalaysiaDocument52 pagesActive Faults in MalaysiaHazim HaNo ratings yet
- Understanding Bernoulli's Principle Through Simulations PDFDocument4 pagesUnderstanding Bernoulli's Principle Through Simulations PDFIoannis GaroufalidisNo ratings yet
- Biomediacal Waste Project FinalDocument43 pagesBiomediacal Waste Project Finalashoknr100% (1)
- Earth Sciences Notes Csir-Ugc Net JRFDocument57 pagesEarth Sciences Notes Csir-Ugc Net JRFmanas773No ratings yet
- Fpe QB 23Document7 pagesFpe QB 23manishchalke65No ratings yet
- Earth Science (Metamorphic Rocks)Document8 pagesEarth Science (Metamorphic Rocks)MA. ALEXIS LAURENNo ratings yet
- Drug Study LidocaineDocument15 pagesDrug Study LidocaineFrancym R. BatengaNo ratings yet
- Inform LetterDocument2 pagesInform LetterMc Suan75% (4)
- Modern Myth and Magical Face Shifting Technology in Girish Karnad Hayavadana and NagamandalaDocument2 pagesModern Myth and Magical Face Shifting Technology in Girish Karnad Hayavadana and NagamandalaKumar KumarNo ratings yet
- TS SR Chemistry Imp Questions PDFDocument5 pagesTS SR Chemistry Imp Questions PDFUnknown Khan100% (3)
- Predictive Maintenance Attempts To Detect The Onset of A Degradation Mechanism With The Goal of Correcting That Degradation Prior To Signiicant Deterioration in The Component or EquipmentDocument6 pagesPredictive Maintenance Attempts To Detect The Onset of A Degradation Mechanism With The Goal of Correcting That Degradation Prior To Signiicant Deterioration in The Component or EquipmentTodd BenjaminNo ratings yet
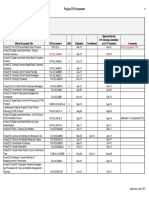
- Approved Project 25 StandardsDocument5 pagesApproved Project 25 StandardsepidavriosNo ratings yet
- A Presentation On-: Dr. Nikhil Oza Intern BvdumcDocument43 pagesA Presentation On-: Dr. Nikhil Oza Intern BvdumcMaheboob GanjalNo ratings yet
- Math 202 Syllabus-Spring18 PDFDocument2 pagesMath 202 Syllabus-Spring18 PDFvonacoc49No ratings yet
- Module in Pe 103Document79 pagesModule in Pe 103Kym Dacudao100% (1)
- Product Lifecycle Management and Sustainable Development in The Context of Industry 4.0: A Systematic Literature ReviewDocument10 pagesProduct Lifecycle Management and Sustainable Development in The Context of Industry 4.0: A Systematic Literature ReviewJosip StjepandicNo ratings yet
- Greater Occipital Nerve Block: Pain ManagementDocument3 pagesGreater Occipital Nerve Block: Pain Managementkillingeyes177No ratings yet
- Binder 3 of 4 Dec-2018Document1,169 pagesBinder 3 of 4 Dec-2018Anonymous OEmUQuNo ratings yet
- Unit 2 - Presentations (Image, Impact and Making An Impression) 2Document25 pagesUnit 2 - Presentations (Image, Impact and Making An Impression) 2LK Chiarra Panaligan100% (1)
- Properties of Matter ReviewDocument8 pagesProperties of Matter Reviewapi-290100812No ratings yet
- SP 73Document105 pagesSP 73Rodrigo Vilanova100% (3)
- ELIDA Products CatalogueDocument37 pagesELIDA Products CatalogueAbhishek AgarwalNo ratings yet
- Calibration of Force ReductionDocument36 pagesCalibration of Force Reductionvincenzo_12613735No ratings yet
- Trawl Master Present A TieDocument19 pagesTrawl Master Present A Tieapi-3719203No ratings yet
- Dark Data: Why What You Don’t Know MattersFrom EverandDark Data: Why What You Don’t Know MattersRating: 4.5 out of 5 stars4.5/5 (3)
- Business Intelligence Strategy and Big Data Analytics: A General Management PerspectiveFrom EverandBusiness Intelligence Strategy and Big Data Analytics: A General Management PerspectiveRating: 5 out of 5 stars5/5 (5)
- Grokking Algorithms: An illustrated guide for programmers and other curious peopleFrom EverandGrokking Algorithms: An illustrated guide for programmers and other curious peopleRating: 4 out of 5 stars4/5 (16)
- Starting Database Administration: Oracle DBAFrom EverandStarting Database Administration: Oracle DBARating: 3 out of 5 stars3/5 (2)
- Optimizing DAX: Improving DAX performance in Microsoft Power BI and Analysis ServicesFrom EverandOptimizing DAX: Improving DAX performance in Microsoft Power BI and Analysis ServicesNo ratings yet
- Blockchain Basics: A Non-Technical Introduction in 25 StepsFrom EverandBlockchain Basics: A Non-Technical Introduction in 25 StepsRating: 4.5 out of 5 stars4.5/5 (24)
- Fusion Strategy: How Real-Time Data and AI Will Power the Industrial FutureFrom EverandFusion Strategy: How Real-Time Data and AI Will Power the Industrial FutureNo ratings yet
- THE STEP BY STEP GUIDE FOR SUCCESSFUL IMPLEMENTATION OF DATA LAKE-LAKEHOUSE-DATA WAREHOUSE: "THE STEP BY STEP GUIDE FOR SUCCESSFUL IMPLEMENTATION OF DATA LAKE-LAKEHOUSE-DATA WAREHOUSE"From EverandTHE STEP BY STEP GUIDE FOR SUCCESSFUL IMPLEMENTATION OF DATA LAKE-LAKEHOUSE-DATA WAREHOUSE: "THE STEP BY STEP GUIDE FOR SUCCESSFUL IMPLEMENTATION OF DATA LAKE-LAKEHOUSE-DATA WAREHOUSE"Rating: 3 out of 5 stars3/5 (1)
- DB2 9 System Administration for z/OS: Certification Study Guide: Exam 737From EverandDB2 9 System Administration for z/OS: Certification Study Guide: Exam 737Rating: 3 out of 5 stars3/5 (2)
- SQL QuickStart Guide: The Simplified Beginner's Guide to Managing, Analyzing, and Manipulating Data With SQLFrom EverandSQL QuickStart Guide: The Simplified Beginner's Guide to Managing, Analyzing, and Manipulating Data With SQLRating: 4.5 out of 5 stars4.5/5 (46)
- Microsoft Access Guide to Success: From Fundamentals to Mastery in Crafting Databases, Optimizing Tasks, & Making Unparalleled Impressions [III EDITION]From EverandMicrosoft Access Guide to Success: From Fundamentals to Mastery in Crafting Databases, Optimizing Tasks, & Making Unparalleled Impressions [III EDITION]Rating: 5 out of 5 stars5/5 (8)
- Modelling Business Information: Entity relationship and class modelling for Business AnalystsFrom EverandModelling Business Information: Entity relationship and class modelling for Business AnalystsNo ratings yet
- High-Performance Oracle: Proven Methods for Achieving Optimum Performance and AvailabilityFrom EverandHigh-Performance Oracle: Proven Methods for Achieving Optimum Performance and AvailabilityNo ratings yet
- Joe Celko's SQL for Smarties: Advanced SQL ProgrammingFrom EverandJoe Celko's SQL for Smarties: Advanced SQL ProgrammingRating: 3 out of 5 stars3/5 (1)
- Data Architecture: A Primer for the Data Scientist: A Primer for the Data ScientistFrom EverandData Architecture: A Primer for the Data Scientist: A Primer for the Data ScientistRating: 4.5 out of 5 stars4.5/5 (3)




































































































![Microsoft Access Guide to Success: From Fundamentals to Mastery in Crafting Databases, Optimizing Tasks, & Making Unparalleled Impressions [III EDITION]](https://imgv2-1-f.scribdassets.com/img/word_document/610686937/149x198/9ccfa6158e/1714467780?v=1)










