You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Manual Motor qsk60 PDFDocument2 pagesManual Motor qsk60 PDFhansell miranda29% (17)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Design of Concrete Slab Elements in Biaxial Bending: October 2010Document21 pagesDesign of Concrete Slab Elements in Biaxial Bending: October 2010Myron OikonomakisNo ratings yet
- r7 04 05Document11 pagesr7 04 05Myron OikonomakisNo ratings yet
- Computers and Structures: Jaehyung Kim, Klaus-Jürgen BatheDocument15 pagesComputers and Structures: Jaehyung Kim, Klaus-Jürgen BatheMyron OikonomakisNo ratings yet
- SBE SS4-secure PDFDocument135 pagesSBE SS4-secure PDFMyron OikonomakisNo ratings yet
- Automatic Verified Shear Force Design of Reinforced Concrete BeamsDocument14 pagesAutomatic Verified Shear Force Design of Reinforced Concrete BeamsMyron OikonomakisNo ratings yet
- Generation of Shape Functions For Straight Beam ElementsDocument9 pagesGeneration of Shape Functions For Straight Beam ElementsMyron OikonomakisNo ratings yet
- Marine SuperstructureDocument2 pagesMarine SuperstructureMyron OikonomakisNo ratings yet
- 1.0 General Provisions: 1.1 ScopeDocument28 pages1.0 General Provisions: 1.1 ScopeMyron OikonomakisNo ratings yet
- SC+ Design Guidelines EnglishDocument27 pagesSC+ Design Guidelines EnglishMyron OikonomakisNo ratings yet
- FEMA310cvr ForeDocument11 pagesFEMA310cvr ForeMyron OikonomakisNo ratings yet
- HHT MethodDocument10 pagesHHT MethodMyron OikonomakisNo ratings yet
- Engineering MechanicsDocument2 pagesEngineering MechanicsMasood Raza RazaNo ratings yet
- Taijune Fire Tube Steam BoilerDocument8 pagesTaijune Fire Tube Steam BoilerAjay GoswamiNo ratings yet
- CAT Engine Specifications 2.0% O Rating: G3304 Gas Petroleum EngineDocument4 pagesCAT Engine Specifications 2.0% O Rating: G3304 Gas Petroleum EngineDiogo Purizaca PeñaNo ratings yet
- 4th Generation Subaru Legacy Rear Wheel Bearing Replacement Walk-Through (Final With Pics)Document11 pages4th Generation Subaru Legacy Rear Wheel Bearing Replacement Walk-Through (Final With Pics)pausenotNo ratings yet
- Helix Angle OptimizationDocument10 pagesHelix Angle OptimizationkumarNo ratings yet
- Hvac Air Balance Report FormDocument8 pagesHvac Air Balance Report FormAbdullah.N FAAliNo ratings yet
- Grouts & AnchorsDocument6 pagesGrouts & Anchorseng_osamahazaymehNo ratings yet
- GMX Complete KnowledgeDocument36 pagesGMX Complete KnowledgeSoumen PandaNo ratings yet
- Multiple Choice Question AnswersDocument4 pagesMultiple Choice Question AnswersAnkit kannojiaNo ratings yet
- TURBINE Logics and InterlocksDocument62 pagesTURBINE Logics and Interlockskalyanm20351586% (7)
- PDS Na GTSPP100 3L PDFDocument2 pagesPDS Na GTSPP100 3L PDFhamza2085No ratings yet
- 2017 - OTR Tyre Line-Up PDFDocument14 pages2017 - OTR Tyre Line-Up PDFOscar Correa MercadoNo ratings yet
- Details of Horizontal Bracing of A Steel StructureDocument1 pageDetails of Horizontal Bracing of A Steel StructureHammer HeadNo ratings yet
- Energy Efficient Induction Motors - Three Phase Squirrel CageDocument1 pageEnergy Efficient Induction Motors - Three Phase Squirrel Cagekinner3No ratings yet
- Me 422 Industrial Hydraulics I Laboratuar Exercise Book: Adopted From Festo DitacticDocument14 pagesMe 422 Industrial Hydraulics I Laboratuar Exercise Book: Adopted From Festo DitacticMustafa ŞafakNo ratings yet
- DP6H-APKA60 ProposalDocument8 pagesDP6H-APKA60 Proposalcarlos yepezNo ratings yet
- Electric Actuated Butterfly Valves: FeaturesDocument7 pagesElectric Actuated Butterfly Valves: FeaturesRicardo NapitupuluNo ratings yet
- Lechler Airnozzles Series 600 383 35Document2 pagesLechler Airnozzles Series 600 383 35eka jimmyNo ratings yet
- Lesson PlanDocument6 pagesLesson Planapi-550666616No ratings yet
- Mech 32-Strength of Materials: Fundamental Concepts 1Document34 pagesMech 32-Strength of Materials: Fundamental Concepts 1Alyssa MadelNo ratings yet
- FINAL CSEC Timetable June July 2021Document12 pagesFINAL CSEC Timetable June July 2021Matthew-Anthony BucknorNo ratings yet
- P011-0004, Symbols & General NotesDocument1 pageP011-0004, Symbols & General NotesMubashir fareedNo ratings yet
- Side-By-Side Refrigerator: Model No. Plhs69EeDocument21 pagesSide-By-Side Refrigerator: Model No. Plhs69EeEdison EspinalNo ratings yet
- 4-QP Key Cat-2 QP Answer Key PDFDocument11 pages4-QP Key Cat-2 QP Answer Key PDFsiva yandraNo ratings yet
- Martin Yale 959 ManualDocument16 pagesMartin Yale 959 ManualnapoleanpintoNo ratings yet
- OrcaFlex Training Syllabus v10.3 PDFDocument4 pagesOrcaFlex Training Syllabus v10.3 PDFtrueman44No ratings yet
- Aerobee 150A - Vought Astronautics Report AST E1R-13319Document46 pagesAerobee 150A - Vought Astronautics Report AST E1R-13319Ramón Omar Córdova MuñozNo ratings yet
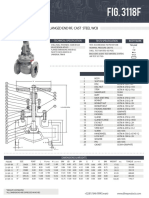
- 3118F 3318F 3618F-SeriesDocument6 pages3118F 3318F 3618F-SeriesDavid CandoNo ratings yet
- Sekačka TORO 53 ADS - Katalog Dílů-3350-665Document24 pagesSekačka TORO 53 ADS - Katalog Dílů-3350-665Vladimír KřížNo ratings yet