You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Arc ReactorDocument10 pagesArc Reactorshubh100% (1)
- Implementation and Analysis of Microcontroller Based Soft Starters For Three Phase Induction MotorsDocument7 pagesImplementation and Analysis of Microcontroller Based Soft Starters For Three Phase Induction MotorsMega Firdausi NuzullaNo ratings yet
- The Design of Soft Starter For AC Motors Based On Single Neuron PI RegulatorDocument5 pagesThe Design of Soft Starter For AC Motors Based On Single Neuron PI RegulatorMega Firdausi NuzullaNo ratings yet
- Single-Phase Induction Motor Adjustable Speed Drive: Direct Phase Angle Control of The Auxiliary Winding SupplyDocument7 pagesSingle-Phase Induction Motor Adjustable Speed Drive: Direct Phase Angle Control of The Auxiliary Winding SupplyMega Firdausi NuzullaNo ratings yet
- An Improved Method For Induction Motor Constant Current Soft-Starting Using Fuzzy-ControlDocument5 pagesAn Improved Method For Induction Motor Constant Current Soft-Starting Using Fuzzy-ControlMega Firdausi NuzullaNo ratings yet
- Fox RainDocument2 pagesFox RainMega Firdausi NuzullaNo ratings yet
- Real Time Operating SystemsDocument23 pagesReal Time Operating SystemsManeesha KrishnanNo ratings yet
- Vacuum Pump Project PresentationDocument5 pagesVacuum Pump Project PresentationAlexandru Robert DumbravăNo ratings yet
- Service Manual Brother nx600Document214 pagesService Manual Brother nx600Diana DaschnerNo ratings yet
- Hs35a 2011Document11 pagesHs35a 2011Ross Mathew0% (1)
- Aks PHPDocument8 pagesAks PHParyaNo ratings yet
- Man Flexfiller Pressurisation ENG v8.1 201502Document40 pagesMan Flexfiller Pressurisation ENG v8.1 201502Carlos Enrique Godoy SifontesNo ratings yet
- P21ev0693 r03 İstanbul Deni̇z Otobüsleri̇Document4 pagesP21ev0693 r03 İstanbul Deni̇z Otobüsleri̇Hüseyin ÇaksuNo ratings yet
- HEDTD CL444 101 C1gDocument2 pagesHEDTD CL444 101 C1gJaimecolina2004No ratings yet
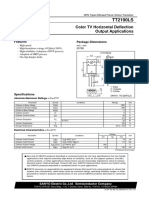
- TT2190LS: Color TV Horizontal Deflection Output ApplicationsDocument4 pagesTT2190LS: Color TV Horizontal Deflection Output ApplicationsFreddyNo ratings yet
- KMT Streamline SL-V Pumps Catalog PDFDocument12 pagesKMT Streamline SL-V Pumps Catalog PDFJohn AzimovNo ratings yet
- SCR Control of Electric HeatersDocument3 pagesSCR Control of Electric HeatersHayden Lovett100% (2)
- M SCD enDocument204 pagesM SCD enMosargt ArgNo ratings yet
- Ali Campbell Complete PA Spec 2011 V8Document7 pagesAli Campbell Complete PA Spec 2011 V8Duke Smith-Holley0% (1)
- Lab Manual of Computer GraphicsDocument4 pagesLab Manual of Computer GraphicsniksritikNo ratings yet
- LS 820Document2 pagesLS 8208819133No ratings yet
- Thermal Profiler HC-40 60 80 12 ChannelDocument4 pagesThermal Profiler HC-40 60 80 12 ChannelWade DyerNo ratings yet
- Ti Tas5630 EvmDocument1 pageTi Tas5630 EvmTrenton Astley IslaNo ratings yet
- CS QuestionsDocument2 pagesCS QuestionsKarthik MambersNo ratings yet
- Quantum Solutions 2016Document3 pagesQuantum Solutions 2016JoanaNo ratings yet
- ECE 4101 Computer and Information Lab III - Experiment 2Document14 pagesECE 4101 Computer and Information Lab III - Experiment 2AHMAD ANWARNo ratings yet
- Thin FilmDocument42 pagesThin FilmBhagyashree PaniNo ratings yet
- LG Ru-42pz61 42PZ71Document43 pagesLG Ru-42pz61 42PZ71BElectric100% (1)
- Nerl Work ShopDocument237 pagesNerl Work ShopRatan KotipalliNo ratings yet
- TeB1 TEB2Document4 pagesTeB1 TEB2Luiz AlmeidaNo ratings yet
- Optireg™ Linear: Infineon'S Automotive LdosDocument25 pagesOptireg™ Linear: Infineon'S Automotive LdosAgus YuliantoNo ratings yet
- Cdma 450Document31 pagesCdma 450Arsalan Badar Wasti100% (1)
- Slva 437 ADocument7 pagesSlva 437 Azigoto_2nNo ratings yet
- Power Cable High Freq ModelDocument7 pagesPower Cable High Freq ModelkrcdewanewNo ratings yet
- Motorola JLX Line Extender PDFDocument2 pagesMotorola JLX Line Extender PDFJosé Luis Gualotuña P.No ratings yet