You might also like
- IAR Workbench SettingsDocument26 pagesIAR Workbench SettingsDavid Moody100% (1)
- PIC MicrocontrollersDocument35 pagesPIC Microcontrollersanbuelectrical100% (1)
- Atmel AVRDocument17 pagesAtmel AVRrudy_tanagaNo ratings yet
- Demo Program From Lecture #1: RegistersDocument15 pagesDemo Program From Lecture #1: RegistersNaresh BopparathiNo ratings yet
- Architecture and Programming of 8051 MicrocontrollersDocument299 pagesArchitecture and Programming of 8051 MicrocontrollersSahil Jain100% (1)
- MATLAB & Simulink IntroductionDocument17 pagesMATLAB & Simulink IntroductionBharat BehlNo ratings yet
- Course Title: Microprocessor Interfacing TechnologiesDocument22 pagesCourse Title: Microprocessor Interfacing Technologiesaftab_afzal_2No ratings yet
- Development of ARM Architecture and its ProcessorsDocument40 pagesDevelopment of ARM Architecture and its ProcessorsDwaraka OrugantiNo ratings yet
- Using Winavr - Writing The First Program: Tutorial By: Sohail Alam WWW - Robozaa.Co - CCDocument5 pagesUsing Winavr - Writing The First Program: Tutorial By: Sohail Alam WWW - Robozaa.Co - CCShreyas TaterNo ratings yet
- Hal Manual STMDocument2,232 pagesHal Manual STMDe95BoNo ratings yet
- Lesson 1: The Basics of C++:: Code::Blocks With Mingw G++ Xcode Compatibility IssuesDocument39 pagesLesson 1: The Basics of C++:: Code::Blocks With Mingw G++ Xcode Compatibility IssuesTanveer us zaman100% (1)
- Arm Manual Ver3.2 (Modyfideraj)Document83 pagesArm Manual Ver3.2 (Modyfideraj)Srikanth SriNo ratings yet
- Embedded Lab: Kgisl Institute of Technology Department of Electronics and CommunicationDocument111 pagesEmbedded Lab: Kgisl Institute of Technology Department of Electronics and CommunicationJeeva NatarajanNo ratings yet
- Arduino CCDocument14 pagesArduino CCRachana SrinivasNo ratings yet
- Understanding the Architecture of the 8051 MicrocontrollerDocument113 pagesUnderstanding the Architecture of the 8051 Microcontrollerpraneeth saiNo ratings yet
- Embedded Systems With 8051 CDocument190 pagesEmbedded Systems With 8051 CPayal SinghNo ratings yet
- The 8051 Microcontroller and Embedded Systems: 8051 Assembly Language ProgrammingDocument297 pagesThe 8051 Microcontroller and Embedded Systems: 8051 Assembly Language ProgrammingShalini BaruahNo ratings yet
- Assignment About ArduinoDocument3 pagesAssignment About ArduinoDon LemonNo ratings yet
- DAQ, Simulation and Control in MATLAB and SimulinkDocument21 pagesDAQ, Simulation and Control in MATLAB and SimulinkHammerly Mamani ValenciaNo ratings yet
- Designing Embedded Systems With ArduinoDocument14 pagesDesigning Embedded Systems With Arduinoabreham ashebirNo ratings yet
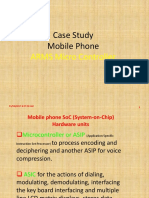
- Case Study Mobile Phone: ARMS Micro ControllerDocument36 pagesCase Study Mobile Phone: ARMS Micro ControllerRana Gulraiz HassanNo ratings yet
- MCBSTM32C Lab PDFDocument30 pagesMCBSTM32C Lab PDFguezaki6636No ratings yet
- Keil Uvision 3 TutorialDocument12 pagesKeil Uvision 3 Tutorialapi-3697475100% (1)
- Chapter 3 Signal Conditioning CircuitDocument30 pagesChapter 3 Signal Conditioning CircuittcsNo ratings yet
- ARM Based Development SyllabusDocument3 pagesARM Based Development SyllabusMANIKANDANNo ratings yet
- Details of Using SIMULINKDocument54 pagesDetails of Using SIMULINKEngr. Omit DebnathNo ratings yet
- Programming Industrial Embedded Systems, 2017./2018.: Laboratory Exercise 1Document69 pagesProgramming Industrial Embedded Systems, 2017./2018.: Laboratory Exercise 1_download_only_No ratings yet
- WinAVR User ManualDocument25 pagesWinAVR User ManualVishnu PrasadNo ratings yet
- CH - 4 Flip-Flops and Related DevicesDocument137 pagesCH - 4 Flip-Flops and Related DevicesMinh Trí Nguyễn (Minh Kio)No ratings yet
- Procedure: Introduction To SIMULINK AM Modulation and DemodulationDocument15 pagesProcedure: Introduction To SIMULINK AM Modulation and DemodulationypobuleshNo ratings yet
- Unit 2-3Document38 pagesUnit 2-3vidhya sNo ratings yet
- UM1724 User Manual: STM32 Nucleo-64 Boards (MB1136)Document69 pagesUM1724 User Manual: STM32 Nucleo-64 Boards (MB1136)Basti NichtechtdernameNo ratings yet
- Guide To Installation And Use Of Keil Μvision2 SoftwareDocument40 pagesGuide To Installation And Use Of Keil Μvision2 Softwareasma mushtaqNo ratings yet
- Computer Programming 1st Year 3rd UnitDocument55 pagesComputer Programming 1st Year 3rd Unitsingam setty dhanalakshmiNo ratings yet
- Arduino BreadBoard Advance Kit User Guide v2.1Document23 pagesArduino BreadBoard Advance Kit User Guide v2.1ic3_2kNo ratings yet
- STM32F4 User ManualDocument42 pagesSTM32F4 User ManualAndrei SerghieNo ratings yet
- S8254A E.en - PTDocument24 pagesS8254A E.en - PTleandroNo ratings yet
- ThumbDocument32 pagesThumbdhapraNo ratings yet
- UntitledDocument79 pagesUntitledNUR SYARIFAH MOHD AZMINo ratings yet
- Manual Tarjeta - Programador PDFDocument81 pagesManual Tarjeta - Programador PDFWILMER CRUZ DIAZNo ratings yet
- Armsravan 140618054148 Phpapp01Document132 pagesArmsravan 140618054148 Phpapp01smganorkarNo ratings yet
- Microcontrollers Explained: Components, Programming & ApplicationsDocument34 pagesMicrocontrollers Explained: Components, Programming & ApplicationsFaridNo ratings yet
- 2 - ARM Cotex-M3 - IntroductionDocument124 pages2 - ARM Cotex-M3 - IntroductionNghĩa VũNo ratings yet
- STM32F070CB STM32F070RB STM32F070C6 STM32F070F6Document83 pagesSTM32F070CB STM32F070RB STM32F070C6 STM32F070F6MutiaNo ratings yet
- Pp07aDocument78 pagesPp07acho caineeNo ratings yet
- IAR Embedded WorkbenchDocument186 pagesIAR Embedded WorkbenchJonas Lopez MontoroNo ratings yet
- Connect ATmega328P Xplained Mini to Arduino IDEDocument5 pagesConnect ATmega328P Xplained Mini to Arduino IDEphuceltnNo ratings yet
- stm32h742 stm32h743 Device Limitations StmicroelectronicsDocument45 pagesstm32h742 stm32h743 Device Limitations StmicroelectronicsAndres GonzalezNo ratings yet
- Matlab Basics Tutorial: VectorsDocument52 pagesMatlab Basics Tutorial: VectorsMohit Bathla MontyNo ratings yet
- stm32 PDFDocument38 pagesstm32 PDFpriyaNo ratings yet
- Font PageDocument9 pagesFont PageTarekNo ratings yet
- Analysis and Design of Combinational Logic CirciutsDocument74 pagesAnalysis and Design of Combinational Logic CirciutsMS RahilNo ratings yet
- Digital Electronics Circuit: Assignment - 2Document28 pagesDigital Electronics Circuit: Assignment - 2Rubal SharmaNo ratings yet
- Chapter1 Introduction To Control SystemDocument30 pagesChapter1 Introduction To Control SystemAijaz AhmedNo ratings yet
- AVR Microcontroller: Prepared By: Eng. Ashraf DarwishDocument29 pagesAVR Microcontroller: Prepared By: Eng. Ashraf DarwishHectorLopez100% (2)
- Atmega TutorialDocument18 pagesAtmega TutorialEssel Jojo FlintNo ratings yet
- Avr Libc User ManualDocument77 pagesAvr Libc User ManualFiodor ApachiNo ratings yet
- Avrdude Doc 6.0.1Document50 pagesAvrdude Doc 6.0.1Sandoval DanielNo ratings yet
- Programming AVR Micro Controllers in CDocument50 pagesProgramming AVR Micro Controllers in CDhishan AmaranathNo ratings yet
- 10V Current Commutation Commands: Single & Dual Axis Drive WithDocument2 pages10V Current Commutation Commands: Single & Dual Axis Drive Withsaran2012No ratings yet
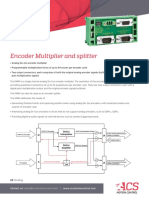
- Encoder Multiplier and Splitter: CE PendingDocument2 pagesEncoder Multiplier and Splitter: CE Pendingsaran2012No ratings yet
- Encoder Multiplier and Splitter: CE PendingDocument2 pagesEncoder Multiplier and Splitter: CE Pendingsaran2012No ratings yet
- Atmel 2521 AVR Hardware Design Considerations Application Note AVR042Document17 pagesAtmel 2521 AVR Hardware Design Considerations Application Note AVR042saran2012No ratings yet
- Aqms Phase1Document16 pagesAqms Phase1saran2012No ratings yet
- Background and GoalsDocument8 pagesBackground and Goalssaran2012No ratings yet
- Modeling and SimulationDocument29 pagesModeling and SimulationMiloradNo ratings yet
- FIFA Video Game - Players ClassificationDocument26 pagesFIFA Video Game - Players Classificationimmi1989No ratings yet
- LA Tall Buildings Structural Design Council 2020 ProcedureDocument94 pagesLA Tall Buildings Structural Design Council 2020 ProcedureMir Shabir Ali TalpurNo ratings yet
- Managing Six SigmaDocument286 pagesManaging Six SigmaSharandeep100% (1)
- Relationships of Length, Mass and Angle on a Simple Pendulum's PeriodDocument5 pagesRelationships of Length, Mass and Angle on a Simple Pendulum's PeriodrezzmanNo ratings yet
- Functions for Physics ClassDocument294 pagesFunctions for Physics ClassdjinachhgdgyudfgNo ratings yet
- Recurrence and Master TheoremDocument35 pagesRecurrence and Master Theoremwseries50% (2)
- Chapter 4Document13 pagesChapter 4Solo NunooNo ratings yet
- DimensioningDocument23 pagesDimensioningChaitanyaNo ratings yet
- AriesDocument51 pagesAriesAlfianRizaldiNo ratings yet
- 1011202222101PM-Class 5 Revision Worksheet For First Term Examination - MathsDocument7 pages1011202222101PM-Class 5 Revision Worksheet For First Term Examination - Mathsak dNo ratings yet
- Litpack ManuelDocument66 pagesLitpack ManuelMoussaab BerkaniNo ratings yet
- Surface Area of A Rectangular PrismDocument10 pagesSurface Area of A Rectangular PrismEstelita P. AgustinNo ratings yet
- Aiunit1 180129180236 PDFDocument216 pagesAiunit1 180129180236 PDFSahilNo ratings yet
- Adaptive Mutual Coupling Compensation Method For Airborne STAP Radar With End-Fire ArrayDocument16 pagesAdaptive Mutual Coupling Compensation Method For Airborne STAP Radar With End-Fire Arrayhh wNo ratings yet
- New Microsoft Office Word Document PDFDocument5 pagesNew Microsoft Office Word Document PDFSubhash KNo ratings yet
- 10-14 Abs Value Notes PDFDocument24 pages10-14 Abs Value Notes PDFParadox ParadoxNo ratings yet
- JavaScript: The Programming Language of the WebDocument15 pagesJavaScript: The Programming Language of the WebMary EcargNo ratings yet
- 8th DH Errata PDFDocument10 pages8th DH Errata PDFClaudioNo ratings yet
- Universal NorDocument15 pagesUniversal NormNo ratings yet
- 04 - 05 SequencesDocument12 pages04 - 05 SequencesHaidee VenturilloNo ratings yet
- Assignment 3 PDFDocument5 pagesAssignment 3 PDFanon_929121264No ratings yet
- Dm2 Ch4 AutomataDocument38 pagesDm2 Ch4 AutomataPham Hoai VanNo ratings yet
- Jayshree Periwal Global School Grade 7D TimetableDocument1 pageJayshree Periwal Global School Grade 7D Timetableranveer 0No ratings yet
- Release Notes Sap 2000 V 2020Document6 pagesRelease Notes Sap 2000 V 2020Uzair Maqbool KhanNo ratings yet
- Marketing Head's Conundrum (Group 7)Document13 pagesMarketing Head's Conundrum (Group 7)Rini Rafi100% (2)
- CE214Document2 pagesCE214Mujammil ChoudhariNo ratings yet
- Statistics - Lying Without Sinning?: - "Lies, Damned Lies, and Statistics"Document48 pagesStatistics - Lying Without Sinning?: - "Lies, Damned Lies, and Statistics"αγαπημένη του ΧριστούNo ratings yet
- MiniTest 230304Document2 pagesMiniTest 230304Osama MaherNo ratings yet
- Solution Report: Strength of MaterialsDocument10 pagesSolution Report: Strength of MaterialsMamta DoliyaNo ratings yet