You might also like
- Casos de EstudioDocument3 pagesCasos de EstudioAlejandro BurgosNo ratings yet
- Política de Reclamo o Retiro de ProductosDocument1 pagePolítica de Reclamo o Retiro de ProductosAlejandro BurgosNo ratings yet
- Geren CIADocument3 pagesGeren CIAAlejandro BurgosNo ratings yet
- Local ConsultorioDocument9 pagesLocal ConsultorioAlejandro BurgosNo ratings yet
- Bench MarkingDocument5 pagesBench MarkingAlejandro BurgosNo ratings yet
- Bench MarkingDocument5 pagesBench MarkingAlejandro BurgosNo ratings yet
- Codigo de Aguja de BuffonDocument2 pagesCodigo de Aguja de BuffonAlejandro BurgosNo ratings yet
- Bench MarkingDocument5 pagesBench MarkingAlejandro BurgosNo ratings yet
- Unidad 3 Maquinas SincronasDocument34 pagesUnidad 3 Maquinas SincronasMaricelaNo ratings yet
- Inmunidad Al RuidoDocument17 pagesInmunidad Al RuidoPaul R. ZamudioNo ratings yet
- Simbologia Electrica EcuadorDocument32 pagesSimbologia Electrica EcuadorNine330% (1)
- Cancha de BasquetDocument2 pagesCancha de BasquetDario BasualdoNo ratings yet
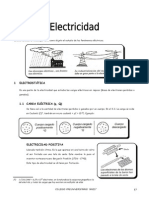
- ElectricidadDocument5 pagesElectricidadFelipeScribeNo ratings yet
- Tema 1 - V3Document18 pagesTema 1 - V3Daniel RicoNo ratings yet
- Pequeñas Plantas de Energia Electrica PDFDocument27 pagesPequeñas Plantas de Energia Electrica PDFkrustigrusNo ratings yet
- Antenas de RadiofrecuenciaDocument17 pagesAntenas de RadiofrecuenciaAngel Salgado100% (1)
- 2 Pantografo VerticalDocument3 pages2 Pantografo Verticalalex rodriguezNo ratings yet
- PCT Instalaciones Electricas Interiores Baja Tension 2017Document27 pagesPCT Instalaciones Electricas Interiores Baja Tension 2017Javier Cordero IglesiasNo ratings yet
- Ficha Técnica DVR-M1Document2 pagesFicha Técnica DVR-M1assistante embNo ratings yet
- Micronova HydroDocument113 pagesMicronova HydroSergio CastañeiraNo ratings yet
- Clasificacion de Metodos ElectroquimicosDocument2 pagesClasificacion de Metodos ElectroquimicosGabriel LópezNo ratings yet
- Filtros Pasivos PDFDocument48 pagesFiltros Pasivos PDFashlyduartNo ratings yet
- Pre Informe 2.2Document6 pagesPre Informe 2.2Juliana MontenegroNo ratings yet
- Problemas Resueltos Intro Potencia PDFDocument5 pagesProblemas Resueltos Intro Potencia PDFDan Rodriguez100% (2)
- Ejercicios y Problemas Resueltos de Condensadores EsfericosDocument10 pagesEjercicios y Problemas Resueltos de Condensadores EsfericosneivaprojetosNo ratings yet
- 10 JfetDocument29 pages10 JfetDAYPLAY EBOGAMEXNo ratings yet
- Principios de Coordinación de Aislamiento en SubestacionesDocument8 pagesPrincipios de Coordinación de Aislamiento en SubestacionesAlvaro Martínez SantiagoNo ratings yet
- Dulce Herrera Laura Taller 4 Ley de GaussDocument8 pagesDulce Herrera Laura Taller 4 Ley de GaussJuan ManuelNo ratings yet
- CE Ud TLLR 1 211105.v.1Document1 pageCE Ud TLLR 1 211105.v.1MATEO ALVARADO MALAVERNo ratings yet
- Cat CEM7 Es PDFDocument12 pagesCat CEM7 Es PDFtecnigenelec100% (1)
- DualidadDocument2 pagesDualidadMMAtinfNo ratings yet
- Instituto Tecnológico Superior Ismael Pérez Pazmiño DemandaDocument5 pagesInstituto Tecnológico Superior Ismael Pérez Pazmiño DemandaLeo CrespoNo ratings yet
- Lineas de TransmisionDocument19 pagesLineas de TransmisionFERDINADNo ratings yet
- Cardama Cap4 Cuestiones Jacome RogerDocument5 pagesCardama Cap4 Cuestiones Jacome RogerNicolasJacomeNo ratings yet
- Empalmes ElectricosDocument33 pagesEmpalmes ElectricosElias Ulises Manriquez FuentealbaNo ratings yet
- Circuito MagneticoDocument17 pagesCircuito MagneticoMartin Alejandro Betancur ChuquimiaNo ratings yet
- ACTIVIDAD1Document8 pagesACTIVIDAD1Luis Angel CarballoNo ratings yet
- E Digitales Lab 5Document11 pagesE Digitales Lab 5LUIS ALBERTO CUPA HANCCONo ratings yet