You might also like
- Algoritmo para determinar matriz diagonalDocument56 pagesAlgoritmo para determinar matriz diagonalAARON SEBASTIAN CHIRIBOGA TOAPANTANo ratings yet
- Eje Calculo Vectorial (Ipn) PDFDocument9 pagesEje Calculo Vectorial (Ipn) PDFSandy EcheverriaNo ratings yet
- Practica de Ajuste de CurvasDocument5 pagesPractica de Ajuste de CurvasIvanovNo ratings yet
- Algebra Vectorial - Taller de RepasoDocument2 pagesAlgebra Vectorial - Taller de RepasoAndres RiveraNo ratings yet
- Álgebra 5°Document34 pagesÁlgebra 5°Eduardo MagicworldNo ratings yet
- Deber 1Document3 pagesDeber 1David Palma0% (2)
- 03 Números Reales DiapositivasDocument52 pages03 Números Reales DiapositivasRicardo EmilioNo ratings yet
- CombinatoriaDocument2 pagesCombinatoriaFabricioNo ratings yet
- Cuadernillo-20211218 184243KSOGDocument3 pagesCuadernillo-20211218 184243KSOGYuliana yanelaNo ratings yet
- Caso - Mate 1Document5 pagesCaso - Mate 1Carlos Tolentino0% (1)
- Fisica 2Document8 pagesFisica 2Junior VivianiNo ratings yet
- 1.4. Ejercicios Resueltos - Diagonalizacion Matrices SimetricasDocument13 pages1.4. Ejercicios Resueltos - Diagonalizacion Matrices SimetricasVeroh GonzalezNo ratings yet
- Binomio de NewtonDocument4 pagesBinomio de NewtonDavizhitho Fasanando RuizNo ratings yet
- Leche Con NataDocument1 pageLeche Con NataWilfredoNo ratings yet
- 1-1apuntes Numeros Complejos (Simplificado)Document20 pages1-1apuntes Numeros Complejos (Simplificado)Mitzu NoryNo ratings yet
- Solucionario Examen Primer Parcial MatematicaDocument5 pagesSolucionario Examen Primer Parcial MatematicaHarold Bustamante100% (1)
- Cálculos de fuerzas y aceleración en objetos en movimientoDocument4 pagesCálculos de fuerzas y aceleración en objetos en movimientoDavidNo ratings yet
- Lab 2 Fis 1Document8 pagesLab 2 Fis 1Grace Gomez Atora100% (1)
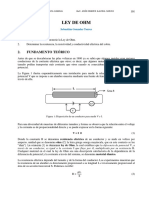
- Ley de Ohm-Sebastián GonzalesDocument8 pagesLey de Ohm-Sebastián GonzalesSantiagoNo ratings yet
- Solucion de D'AlembertDocument3 pagesSolucion de D'AlembertJorge MatusNo ratings yet
- Practiva de Laboratorio N°7Document11 pagesPractiva de Laboratorio N°7Jeffry RodriguezNo ratings yet
- Diagonalización de matricesDocument3 pagesDiagonalización de matriceseduNo ratings yet
- Practica 1 Sistemas de Ecuaciones y Matrices-1Document3 pagesPractica 1 Sistemas de Ecuaciones y Matrices-1pabloNo ratings yet
- CUESTIONARIO N°7 - MergedDocument8 pagesCUESTIONARIO N°7 - MergedSharyn Cruz CastroNo ratings yet
- LAB. N°1 (Choque de Dos Esferas Iguales) G6 Dia 01-04-22Document22 pagesLAB. N°1 (Choque de Dos Esferas Iguales) G6 Dia 01-04-22jedachagomezNo ratings yet
- Conjuntos y técnicas de conteoDocument6 pagesConjuntos y técnicas de conteoRODOLFO QUISPE SALAZARNo ratings yet
- Ejercicios Resueltos de InterpolacionDocument7 pagesEjercicios Resueltos de InterpolacionJael RuizNo ratings yet
- Química general taller 4 equilibrio químicoDocument1 pageQuímica general taller 4 equilibrio químicomariadelmar hernández giraldoNo ratings yet
- Laboratorio #10Document6 pagesLaboratorio #10Marcelo GutierrezNo ratings yet
- Densidad y Principio de ArquimidesDocument10 pagesDensidad y Principio de ArquimidesLorian HgNo ratings yet
- Practica #8 de Informatica-Corregido PDFDocument12 pagesPractica #8 de Informatica-Corregido PDFLaurie Mathis100% (1)
- Rendimientos 2014Document39 pagesRendimientos 2014Jesus Abel PerezNo ratings yet
- Geometría vectorial: vectores, rectas y planosDocument5 pagesGeometría vectorial: vectores, rectas y planosDiego7120No ratings yet
- Sesion 6 PDFDocument16 pagesSesion 6 PDFRuben JPNo ratings yet
- Problemas Serway 4ta Cap 8Document6 pagesProblemas Serway 4ta Cap 8Dany Mauricio Benitez MartinezNo ratings yet
- Introducción al Cálculo Infinitesimal - Derivadas Direccionales y Vector GradienteDocument20 pagesIntroducción al Cálculo Infinitesimal - Derivadas Direccionales y Vector GradienteCarlos ZepólNo ratings yet
- Geometría Analitica en Dos y Tres Dimensiones Apunte PDFDocument20 pagesGeometría Analitica en Dos y Tres Dimensiones Apunte PDFlepra77100% (1)
- Informe de Fisica 1Document78 pagesInforme de Fisica 1dafreeNo ratings yet
- Guía de Vectores FisicaDocument8 pagesGuía de Vectores FisicaSamuel Morales0% (1)
- Soluciones de EDO en Práctica 1 de MAT-134 y MAT-274Document2 pagesSoluciones de EDO en Práctica 1 de MAT-134 y MAT-274Pabloesponja TarquiNo ratings yet
- Cinetica SolucionarioDocument10 pagesCinetica SolucionarioRaúl Sulca YnoñanNo ratings yet
- 1° Exa. Ord. Teoría 2QM4 2022-2. 1Document3 pages1° Exa. Ord. Teoría 2QM4 2022-2. 1Vazquez Contreras Johana TamaraNo ratings yet
- Parcial2 - CI 2019-2 - para EstudiantesDocument7 pagesParcial2 - CI 2019-2 - para Estudiantesalejandra rodriguezNo ratings yet
- MÉTODOS Lab N° 7Document8 pagesMÉTODOS Lab N° 7NOEMI SANDRA ESTEBAN SANTIAGONo ratings yet
- CrecExpoEjerRefDocument34 pagesCrecExpoEjerRefNick S. Zegarra ChavezNo ratings yet
- Ejercicios P1Document4 pagesEjercicios P1Ricardo AlmonteNo ratings yet
- Asignación de Álgebra Lineal2Document32 pagesAsignación de Álgebra Lineal2Alejo977x0% (1)
- Practica 4-Semana 5Document10 pagesPractica 4-Semana 5Estefania MonroyNo ratings yet
- RepasitoDocument6 pagesRepasitoWily CuellarNo ratings yet
- CTM CLASE 17 Propiedades de Las Soluciones 2019 - 2Document40 pagesCTM CLASE 17 Propiedades de Las Soluciones 2019 - 2Julio Giraldo100% (1)
- 3093 Grupo8 Taller Grupal3Document30 pages3093 Grupo8 Taller Grupal3Saúl InsuastiNo ratings yet
- Informe #10 Preparación de SolucionesDocument2 pagesInforme #10 Preparación de SolucionesYeraldine Fernandez100% (2)
- Practica S 5Document2 pagesPractica S 5Manuel Rodriguez Cabrera0% (1)
- PREPARACIÓN DE HCL 0.1 N Y DE NaOH 0.1 NDocument7 pagesPREPARACIÓN DE HCL 0.1 N Y DE NaOH 0.1 NGuadalupe FloresNo ratings yet
- Informe 7Document9 pagesInforme 7Rotherick Calderon MolinaNo ratings yet
- Cuestionario Unidad 4 ContabilidadDocument4 pagesCuestionario Unidad 4 ContabilidadByron AlbertoNo ratings yet
- Diagonalización de matrices y transformaciones linealesDocument30 pagesDiagonalización de matrices y transformaciones linealesJuan D GonzálezNo ratings yet
- Autovalores y Autovectores IIDocument8 pagesAutovalores y Autovectores IImercenariuss100% (1)
- CAP - 1 Autovalores y Autovectores.Document7 pagesCAP - 1 Autovalores y Autovectores.stimpy79No ratings yet
- Algebra Matricial - GreeneDocument2 pagesAlgebra Matricial - GreeneBenjamin DavisNo ratings yet
- 3 Postulados de SeparacionDocument2 pages3 Postulados de SeparacionAnonymous XmQJx1PneXNo ratings yet
- 1 Cónicas y Traslaciones ApuntesDocument12 pages1 Cónicas y Traslaciones ApuntesAnonymous XmQJx1PneXNo ratings yet
- Algebra Modern ADocument15 pagesAlgebra Modern AJerickson Arevalo SuarezNo ratings yet
- Examen Geometria Analitica Del EspacioDocument7 pagesExamen Geometria Analitica Del EspacioleliNo ratings yet
- Suce SionesmatematicasDocument4 pagesSuce SionesmatematicasMaria de los AngelesNo ratings yet
- DerivadasDocument3 pagesDerivadasAnonymous XmQJx1PneXNo ratings yet
- Teoremas y propiedades sobre números realesDocument4 pagesTeoremas y propiedades sobre números realesAnonymous XmQJx1PneXNo ratings yet
- Estándares Orientadores IniciaDocument248 pagesEstándares Orientadores IniciaGuerra Valdebenito SPNo ratings yet
- Problemas Resueltos Cauchy PDFDocument7 pagesProblemas Resueltos Cauchy PDFAntonioNo ratings yet
- Orden en LRDocument4 pagesOrden en LRAnonymous XmQJx1PneXNo ratings yet
- 0iniciando A La LógicaDocument23 pages0iniciando A La LógicaAnonymous XmQJx1PneXNo ratings yet
- 3 VectoresDocument20 pages3 VectoresJhon DeyneNo ratings yet
- Cristo murió por mí en la cruzDocument7 pagesCristo murió por mí en la cruzalexgranada0% (1)
- 5 Estructuras AlgebraicasDocument18 pages5 Estructuras AlgebraicasPaolita Zubieta BelloNo ratings yet
- Apunte Cálculo I Recta RealDocument30 pagesApunte Cálculo I Recta RealAnonymous XmQJx1PneXNo ratings yet
- Stokes y GausDocument26 pagesStokes y GausBernardo VegaNo ratings yet
- NumerablDocument3 pagesNumerablAnonymous XmQJx1PneXNo ratings yet
- Longitud curvas cálculo diferencial integralDocument6 pagesLongitud curvas cálculo diferencial integralAnonymous XmQJx1PneXNo ratings yet
- CalculoIngCivil Tomo1Document424 pagesCalculoIngCivil Tomo1neokake89% (9)
- CUADERNO.4Funcion Varias - VariablesDocument64 pagesCUADERNO.4Funcion Varias - VariablesManuel Alejandro TorrijosNo ratings yet
- Circunferencia y CírculoDocument32 pagesCircunferencia y CírculoAnonymous XmQJx1PneXNo ratings yet
- CUADERNO.4Funcion Varias - VariablesDocument64 pagesCUADERNO.4Funcion Varias - VariablesManuel Alejandro TorrijosNo ratings yet
- Teoría de grupos abstractos en la resolución de ecuaciones algebraicasDocument12 pagesTeoría de grupos abstractos en la resolución de ecuaciones algebraicasAlberto MoraNo ratings yet
- Ejercicios ResueltosDocument8 pagesEjercicios ResueltosLuis Felipe Alarcon MartinezNo ratings yet
- Adición y SustracciónDocument67 pagesAdición y SustracciónAnonymous XmQJx1PneXNo ratings yet
- Ejercicios ResDocument7 pagesEjercicios ResAnonymous XmQJx1PneXNo ratings yet
- Coordenadas PolaresDocument13 pagesCoordenadas PolaresrobertNo ratings yet
- SMM Pe Textos 2006 v6Document98 pagesSMM Pe Textos 2006 v6Claudio LealNo ratings yet
- Estruturas Algébricas - Grupos e AneisDocument180 pagesEstruturas Algébricas - Grupos e AneisCarlos A. R. Carvalho Jr.100% (7)
- Algebra abstracta: Divisibilidad y mínimo común múltiploDocument60 pagesAlgebra abstracta: Divisibilidad y mínimo común múltiploMilton Gabriel Perdomo100% (1)
- SELECCIÓN UNI ÁLGEBRA EXAMENDocument2 pagesSELECCIÓN UNI ÁLGEBRA EXAMENDiego Aguilar LoyolaNo ratings yet
- Estudio Examenes Madrid - v2Document31 pagesEstudio Examenes Madrid - v2Javier100% (1)
- Temas para Economía OptimizacionDocument189 pagesTemas para Economía OptimizacionJuanPabloRodriguezCardonaNo ratings yet
- Método de EulerDocument2 pagesMétodo de EulerEmily RamírezNo ratings yet
- Programación lineal ensayoDocument3 pagesProgramación lineal ensayojavierc9No ratings yet
- ADA 2 MetodoNumericosDocument15 pagesADA 2 MetodoNumericosEl ApaNo ratings yet
- Calculo IDocument3 pagesCalculo Ivictor gerardoNo ratings yet
- U4 - Practica - Dora Alicia Fabian ZequeraDocument8 pagesU4 - Practica - Dora Alicia Fabian ZequeraFZequera DrAlcNo ratings yet
- Práctica #1-MAT-014-2020-2Document14 pagesPráctica #1-MAT-014-2020-2Elianny FlorianNo ratings yet
- Apuntes ProbEstadistica O1 PDFDocument307 pagesApuntes ProbEstadistica O1 PDFGabriela Mayorga SanchezNo ratings yet
- Tablas Transformadas Laplace Z FourierDocument4 pagesTablas Transformadas Laplace Z Fourierbartistan0% (1)
- Tema 6 Algebra 2Document15 pagesTema 6 Algebra 2Fernando MedranoNo ratings yet
- AritmeticaDocument4 pagesAritmeticaCamilo QuimbayaNo ratings yet
- DERIVADASDocument33 pagesDERIVADASJaviera RochatNo ratings yet
- 1° Examen Parcial 50% - G2Document2 pages1° Examen Parcial 50% - G2Diego Chigua PaintbalNo ratings yet
- Funciones: Dominio, Codominio y RangoDocument8 pagesFunciones: Dominio, Codominio y RangoPa HRNo ratings yet
- Transformada de LaplaceDocument8 pagesTransformada de LaplaceAna Cristina Jaya OrtegaNo ratings yet
- AreasDocument10 pagesAreasLincol Vega VidalNo ratings yet
- Tema Aritmetica 1Document3 pagesTema Aritmetica 1MARIA YSABEL NOVOA TITONo ratings yet
- MAT-103 PRÁCTICA #1: RESOLUCIÓN DE SISTEMAS DE ECUACIONES LINEALES Y OPERACIONES CON MATRICESDocument2 pagesMAT-103 PRÁCTICA #1: RESOLUCIÓN DE SISTEMAS DE ECUACIONES LINEALES Y OPERACIONES CON MATRICESwilver Rodriguez avendañoNo ratings yet
- Gui A Lab RecDocument9 pagesGui A Lab RecRodrigo BazánNo ratings yet
- Trabajo de recuperación matemáticas 7 Instituto Líderes del FuturoDocument1 pageTrabajo de recuperación matemáticas 7 Instituto Líderes del FuturoJhonEdinsonSánchezLeónNo ratings yet
- Mathematical Methods Paper 1 SL SpanishDocument15 pagesMathematical Methods Paper 1 SL SpanishBasile SymNo ratings yet
- Ecuaciones Algebra Superior Unidad III RosaDePenaDocument47 pagesEcuaciones Algebra Superior Unidad III RosaDePenaAdonys Gonzalez100% (1)
- Guía4 - Noveno - Sistemas 2x2Document5 pagesGuía4 - Noveno - Sistemas 2x2Mónica Isabel UrbanoNo ratings yet
- Explorando La Configuración de ColoresDocument4 pagesExplorando La Configuración de ColoresEdwar MéndezNo ratings yet
- Guia de Inglés Cinco SextoDocument3 pagesGuia de Inglés Cinco SextoJuli GallegoNo ratings yet
- 5 Ep Matematicas Santillana RefuerzoDocument47 pages5 Ep Matematicas Santillana RefuerzoBelenNo ratings yet
- Numeros IrracionalesDocument3 pagesNumeros Irracionalesheti nidia sevillano anguloNo ratings yet
- MCM 5toDocument1 pageMCM 5toChristian Bazalar SalasNo ratings yet