You might also like
- Servicios complementarios en sistemas eléctricos de potencia: Análisis y modelamientoFrom EverandServicios complementarios en sistemas eléctricos de potencia: Análisis y modelamientoRating: 5 out of 5 stars5/5 (1)
- EXAMEN PARCIALControl InteligenteDocument9 pagesEXAMEN PARCIALControl InteligenteJheral Ramírez NavarroNo ratings yet
- Laboratorio-Sistemas Control Digital-3 PDFDocument5 pagesLaboratorio-Sistemas Control Digital-3 PDFBoris Benites CalenzaniNo ratings yet
- Tarea Micro y NanoDocument3 pagesTarea Micro y NanoDARWIN DARIUS USCCACHI VALENCIANo ratings yet
- Modelado y simulación de un horno tubularDocument27 pagesModelado y simulación de un horno tubularbrayan vilela villegas100% (1)
- CuestionarioDocument10 pagesCuestionario25 Olmedo RenatoNo ratings yet
- Paralelismo e Incremento de PrestacionesDocument5 pagesParalelismo e Incremento de PrestacionesSteven Vega MedinaNo ratings yet
- Guia IV - Sistemas de Control I NewDocument6 pagesGuia IV - Sistemas de Control I NewYeremi DavilaNo ratings yet
- Laboratorio MicroelectronicaDocument2 pagesLaboratorio Microelectronicaageha28No ratings yet
- Nicanor Raul Benites Saravia - FieeDocument5 pagesNicanor Raul Benites Saravia - FieeWalther CJNo ratings yet
- Labo1 SCD 2020B FinalDocument14 pagesLabo1 SCD 2020B FinalQuino B. JeffryNo ratings yet
- Simulación de funciones de muestreo y tren de impulsos en OctaveDocument12 pagesSimulación de funciones de muestreo y tren de impulsos en OctaveLeonardo Ponce GarciaNo ratings yet
- Laboratorio3 Control DigitalDocument16 pagesLaboratorio3 Control DigitalCésar Augusto Q. LaverianoNo ratings yet
- Solucionario 1er Practica Calificada PDFDocument5 pagesSolucionario 1er Practica Calificada PDFpepefex2612No ratings yet
- Lab3 CONTROL DIGTAL 2020ADocument3 pagesLab3 CONTROL DIGTAL 2020ACésar Jesús AlcaláNo ratings yet
- Spasado15-2 ELT2590Document35 pagesSpasado15-2 ELT2590Elvis C CNo ratings yet
- Curso PDSDocument11 pagesCurso PDSElvis Justo Vilca CárdenasNo ratings yet
- INFORME1Document5 pagesINFORME1Felipe SanchezNo ratings yet
- Prepa 11Document6 pagesPrepa 11Kevin CarpioNo ratings yet
- Sistema de Adquisicion, Supervicion y Monitoreo de Datos (Scada)Document24 pagesSistema de Adquisicion, Supervicion y Monitoreo de Datos (Scada)Juanka Montero100% (1)
- Informe Final N2-Controlador PIDDocument10 pagesInforme Final N2-Controlador PIDMichael Infantes HuacancaNo ratings yet
- Filtros pasivos de primer ordenDocument7 pagesFiltros pasivos de primer ordenDufainderBedoya100% (2)
- Reporte de Filtro Digital de SeñalesDocument24 pagesReporte de Filtro Digital de SeñalesFab HezNo ratings yet
- Modelado y Simulacion - Robot 2 Grados de LibertadDocument7 pagesModelado y Simulacion - Robot 2 Grados de LibertadLalo FrankNo ratings yet
- Bandas de FrecuenciaDocument11 pagesBandas de FrecuenciaCarlos Diaz CamposNo ratings yet
- Informe Final Laboratorio 3 CompensadorDocument6 pagesInforme Final Laboratorio 3 CompensadorOrlando Bustamante FernandezNo ratings yet
- Laboratorio 3 SeñalesDocument5 pagesLaboratorio 3 SeñalesRuben AllendeNo ratings yet
- Laboratorio de FiltrosDocument17 pagesLaboratorio de FiltrosLuis Mendoza100% (1)
- ModuladoresAMFMDocument10 pagesModuladoresAMFMHector MejiasNo ratings yet
- Laboratorio 3 MicroelectronicaDocument8 pagesLaboratorio 3 MicroelectronicaAlvaro SegoviaNo ratings yet
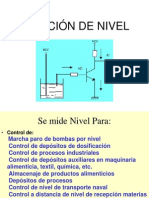
- Medición de NivelDocument37 pagesMedición de NivelEDdy Santiago Valle ArceNo ratings yet
- Ejercicios de SimulinkDocument13 pagesEjercicios de SimulinkEduardo Briones ZambranoNo ratings yet
- LABORATORIO 2 Control DigitalDocument8 pagesLABORATORIO 2 Control DigitaljorgeNo ratings yet
- Ocw Uc3m-Tc PDFDocument359 pagesOcw Uc3m-Tc PDFmaria garciaNo ratings yet
- Onda Senoidal Con PIC18f4550Document5 pagesOnda Senoidal Con PIC18f4550Phillip Brown0% (1)
- Matlab Transformada ZDocument7 pagesMatlab Transformada ZJ.A. CalvilloNo ratings yet
- Informe Control Digital Control de VelocidadDocument14 pagesInforme Control Digital Control de VelocidadMarcelo Alejandro Alvarez LunaNo ratings yet
- Manual de Prácticas de Control DigitalDocument51 pagesManual de Prácticas de Control DigitalNoel FavelaNo ratings yet
- Radioenlace LimaDocument23 pagesRadioenlace LimaGrecia Melissa Dionicio AntunezNo ratings yet
- Aula 5 Filtros Digitales FIRDocument41 pagesAula 5 Filtros Digitales FIRmar_a_zul25No ratings yet
- Glosario de Terminos Sistemas EmbebidosDocument7 pagesGlosario de Terminos Sistemas EmbebidoscharryperdomoNo ratings yet
- Filtros y Diagrama de BodeDocument18 pagesFiltros y Diagrama de Bodeカレン趙No ratings yet
- Capitulo3 PROCESADORES-SUPERESCALARESDocument143 pagesCapitulo3 PROCESADORES-SUPERESCALARESPatty PatNo ratings yet
- Filtro Analogico Pasa AltoDocument11 pagesFiltro Analogico Pasa AltoTRUJILLO ZULUETA RENATO ANGELONo ratings yet
- Informe N°1 de Comunicacion Digital OficialDocument27 pagesInforme N°1 de Comunicacion Digital OficialDiego FloresNo ratings yet
- Lab 2Document8 pagesLab 2Jarlin Ipushima MorenoNo ratings yet
- Tratamiento de señales biomédicas y ruidoDocument4 pagesTratamiento de señales biomédicas y ruidoEric Medina PortilloNo ratings yet
- Problemas 2Document34 pagesProblemas 2Victor Andre0% (1)
- Antena L Invertida - Marco TeoricoDocument4 pagesAntena L Invertida - Marco TeoricoAldair Bravo YarlequeNo ratings yet
- 05 - Respuesta en El Tiempo de Un Sistema de Control ELTDocument19 pages05 - Respuesta en El Tiempo de Un Sistema de Control ELTanderdaNo ratings yet
- Controladores Lógicos Programables AID-1205Document10 pagesControladores Lógicos Programables AID-1205Marco Alonso GarcíaNo ratings yet
- Redes IndustrialesDocument3 pagesRedes IndustrialesJOSUE MARSHALL TINOCO VILLANo ratings yet
- Laboratorio de Tectonologia de Las Energias RenovablesDocument19 pagesLaboratorio de Tectonologia de Las Energias Renovablesluis escobedoNo ratings yet
- Control DigitalDocument10 pagesControl DigitalYoset Fran Mamani AyalaNo ratings yet
- Examen Comunicaciones DigitalesDocument2 pagesExamen Comunicaciones DigitalesJessi CruelNo ratings yet
- Lab N°4 - CPBMDocument10 pagesLab N°4 - CPBMcristhianNo ratings yet
- Transmisión líneas y antenas examenDocument3 pagesTransmisión líneas y antenas examenDiego LazoNo ratings yet
- DAC0800Document4 pagesDAC0800Victor Cardenas Cuevas50% (2)
- Control digital de motor CC-reductoraDocument4 pagesControl digital de motor CC-reductoraluis angel gonzalez100% (1)
- Lab 2 - CONTROL DE VELOCIDAD DE UN MOTOR DCDocument17 pagesLab 2 - CONTROL DE VELOCIDAD DE UN MOTOR DCCAMILO ANDRÉS HERNÁNDEZ STERLINGNo ratings yet
- Laborat 2 PDFDocument7 pagesLaborat 2 PDFJuan FieeNo ratings yet
- Comandos MatlabDocument2 pagesComandos MatlabJuan Carlos Gonzales ArosteNo ratings yet
- Fabricacion Antena 14 DbiDocument5 pagesFabricacion Antena 14 DbiJuan FieeNo ratings yet
- Labort Sistemas DigitalesDocument25 pagesLabort Sistemas DigitalesJuan FieeNo ratings yet
- Practica 04Document2 pagesPractica 04Manuel Eduardo Estrella PolancoNo ratings yet
- Contenido Minimo Memoria DescriptivaDocument1 pageContenido Minimo Memoria DescriptivaJuan FieeNo ratings yet
- 877-12-r Directiva 003-2012-r Presentacion Planes de Tesis y Trabajos de Tesis-Anexo-1Document17 pages877-12-r Directiva 003-2012-r Presentacion Planes de Tesis y Trabajos de Tesis-Anexo-1Meliza En EmergenciaNo ratings yet
- EEM casero para el tratamiento de doloresDocument8 pagesEEM casero para el tratamiento de doloresJuan FieeNo ratings yet
- Termostato Digital Con Pic 16f877aDocument13 pagesTermostato Digital Con Pic 16f877aJuan FieeNo ratings yet
- Primer Examen-Procesos Estocasticos 2011-ADocument2 pagesPrimer Examen-Procesos Estocasticos 2011-AJuan FieeNo ratings yet
- Reglamento de Grados y Titulos Pregrado 2011Document34 pagesReglamento de Grados y Titulos Pregrado 2011Juan FieeNo ratings yet
- Circuitos y Sistemas DigitalesDocument175 pagesCircuitos y Sistemas DigitalesCarlos Espinoza100% (11)
- ModelosDinámicosSEDocument31 pagesModelosDinámicosSEJuan FieeNo ratings yet
- .Apuntes de Electrónica de Potencia - Cap. 3 Convertidores CA-cc. RectificadoresDocument8 pages.Apuntes de Electrónica de Potencia - Cap. 3 Convertidores CA-cc. RectificadoresFerney SolerNo ratings yet
- Electronica de PotenciaDocument29 pagesElectronica de PotenciaJuan FieeNo ratings yet
- Desviación de Fase, El Índice de Modulación y La Desviación de FrecuenciaDocument12 pagesDesviación de Fase, El Índice de Modulación y La Desviación de Frecuenciarudekane236No ratings yet
- Sensor Inductivo - Presentacion - OKDocument19 pagesSensor Inductivo - Presentacion - OKJuan FieeNo ratings yet
- Diodo ZenerDocument9 pagesDiodo ZenerJuan FieeNo ratings yet
- Polarización Del Transistor BipolarDocument13 pagesPolarización Del Transistor BipolarJuan FieeNo ratings yet
- Alimentos Perecibles y EnvasadosDocument1 pageAlimentos Perecibles y EnvasadosJuan FieeNo ratings yet
- Hacer Circuitos ImpresosDocument2 pagesHacer Circuitos ImpresosJuan FieeNo ratings yet
- Contar vocales, palabras repetidas y párrafos en texto de Ingeniería ElectrónicaDocument2 pagesContar vocales, palabras repetidas y párrafos en texto de Ingeniería ElectrónicaJuan FieeNo ratings yet
- Fuente Regulable de 0 A 30 VoltsDocument3 pagesFuente Regulable de 0 A 30 VoltsJuan Fiee100% (3)
- 01 - ReceptoresDocument6 pages01 - ReceptoresJuan FieeNo ratings yet
- Construccion Levitador MagneticoDocument14 pagesConstruccion Levitador MagneticoJuan FieeNo ratings yet
- Solucionario de La Practica3 de ControlDocument7 pagesSolucionario de La Practica3 de ControlJosetjNo ratings yet
- Transformada Z Terminado APADocument28 pagesTransformada Z Terminado APAJiannmarcos Córdova PérezNo ratings yet
- Ecuaciones en diferencia y transformada ZDocument30 pagesEcuaciones en diferencia y transformada ZLuis Fernando Ortiz MartinezNo ratings yet
- Tarea3 SergioMurcia TratamientoDigitaldeSeñalesDocument4 pagesTarea3 SergioMurcia TratamientoDigitaldeSeñalessergioNo ratings yet
- Señales Sistemas PDFDocument77 pagesSeñales Sistemas PDFEdison Cifuentes RiveraNo ratings yet
- Respuesta Transitoria (Punto 6)Document56 pagesRespuesta Transitoria (Punto 6)Astrid CeballosNo ratings yet
- Transformada ZDocument6 pagesTransformada ZEnrique SandovalNo ratings yet
- Ejercicios TZDocument3 pagesEjercicios TZmariaNo ratings yet
- Kuo - Sistemas de Control AutomaticoDocument930 pagesKuo - Sistemas de Control AutomaticoJaIr MaflouNo ratings yet
- Segundo Examen DSPDocument23 pagesSegundo Examen DSPallan_bergel100% (1)
- Problemas Control Digital Primer ParcialDocument39 pagesProblemas Control Digital Primer Parcialcarlos garciaNo ratings yet
- Tablas de Transformada ZDocument3 pagesTablas de Transformada ZAndres NemeNo ratings yet
- Z Transformada AlgoritmoDocument5 pagesZ Transformada AlgoritmofuryofheavenNo ratings yet
- La Transformada ZDocument33 pagesLa Transformada ZIsmael FarfánNo ratings yet
- Programa Analítico de Matemáticas Superiores (8321)Document7 pagesPrograma Analítico de Matemáticas Superiores (8321)john marcos gonzalez varelaNo ratings yet
- Error de Estado Estable y Constantes de ErrorDocument3 pagesError de Estado Estable y Constantes de ErrorJHONATAN ENRIQUEZ ENRIQUEZ SAAVEDRANo ratings yet
- Teoria de Comunicaciones YSenalesDocument11 pagesTeoria de Comunicaciones YSenalesPaqco SuarexNo ratings yet
- TAREA 1-Automatizacion IndustrialDocument10 pagesTAREA 1-Automatizacion IndustrialjeanNo ratings yet
- Ciclo-04-Ie-Matemática AvanzadaDocument9 pagesCiclo-04-Ie-Matemática AvanzadaRomel Cárdenas JavierNo ratings yet
- Presentacion PDS 2Document153 pagesPresentacion PDS 2Manuel ValeriaNo ratings yet
- Control Digital DirectoDocument19 pagesControl Digital DirectoClaudio Ayala BravoNo ratings yet
- 0 - Transformada Z Con ROCv1Document57 pages0 - Transformada Z Con ROCv1Patricio Escobar RamírezNo ratings yet
- INSTRUM - DIDAC - Control DigitalDocument10 pagesINSTRUM - DIDAC - Control DigitalNo pss..No ratings yet
- Lab Nº6 - Respuesta en Frecuencia - 2021 - ParDocument3 pagesLab Nº6 - Respuesta en Frecuencia - 2021 - ParEsteban MontesNo ratings yet
- Lab2 TC2Document9 pagesLab2 TC2jorgeNo ratings yet
- 9nasesion TransformadaZDocument29 pages9nasesion TransformadaZWilfredoCajoCarmonaNo ratings yet
- Introducción Control Digital - USBDocument34 pagesIntroducción Control Digital - USBBrain Magdaleno DazaNo ratings yet
- Transformada ZDocument45 pagesTransformada ZLuz666No ratings yet
- Variable ComplejaDocument9 pagesVariable ComplejaJose Daniel Maitan JimenezNo ratings yet
- Transformada Z Aplicada A La Ingenieria ElectronicaDocument37 pagesTransformada Z Aplicada A La Ingenieria ElectronicaalexNo ratings yet