Professional Documents
Culture Documents
Geometria - Appunti Algebra Lineare E Matrici
Uploaded by
gigiLombricoOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Geometria - Appunti Algebra Lineare E Matrici
Uploaded by
gigiLombricoCopyright:
Available Formats
Rev.
22 settembre 2003
Algebra Lineare e Matrici
Basilio Bona
1
Capitolo 1
Matrici e vettori
Il lettore interessato pu`o fare riferimento a numerosi libri che trattano le matrici e
lalgebra vettoriale; in lingua italiana posso suggerire i testi di base [8, 9], in inglese un
classico per la teoria della matrici `e rappresentato da [4], mentre per lalgebra lineare
consiglio il testo di Strang [10]. Le lezioni videoregistrate di questultimo sono visibili
alla pagina Web del MIT OpenCourseWare, allindirizzo [1].
1.1 Denizioni
Con il termine matrice si denisce un insieme composto da elementi ordinati in m
righe e n colonne, che viene indicato da una delle notazioni seguenti:
A = A
mn
= [a
ij
] =
_
_
_
_
_
a
11
a
12
a
1n
a
21
a
22
a
2n
.
.
.
.
.
.
.
.
.
.
.
.
a
m1
a
m2
a
mn
_
_
_
_
_
Gli elementi a
ij
posso essere variabili reali, quando a
ij
R o variabili complesse,
quando a
ij
C; allora si scrive A R
mn
oppure A C
mn
. In questa Appendice
consideriamo di solito matrici reali, salvo quando espressamente dichiarato. Se n = 1,
abbiamo una matrice particolare, detta vettore colonna o semplicemente vettore.
Data una matrice A
mn
si denisce matrice trasposta la matrice ottenuta scam-
biando le righe e le colonne
A
T
nm
=
_
_
_
_
_
a
11
a
21
a
m1
a
12
a
22
a
m2
.
.
.
.
.
.
.
.
.
.
.
.
a
1n
a
2n
a
mn
_
_
_
_
_
Vale la propriet`a che (A
T
)
T
= A.
Una matrice si dice quadrata se m = n. Se una matrice `e quadrata, anche la sua
trasposta `e quadrata. Una matrice quadrata n n si dice triangolare superiore se
2
a
ij
= 0 per i > j
A
nn
=
_
_
_
_
_
a
11
a
12
a
1n
0 a
22
a
2n
.
.
.
.
.
.
.
.
.
.
.
.
0 0 a
nn
_
_
_
_
_
Se una matrice quadrata `e triangolare superiore, la sua trasposta `e triangolare infe-
riore
A
T
nn
=
_
_
_
_
_
a
11
0 0
a
12
a
22
0
.
.
.
.
.
.
.
.
.
.
.
.
a
1n
a
2n
a
nn
_
_
_
_
_
Se una matrice K ha elementi complessi k
ij
= a
ij
+jb
ij
, (dove j =
1) si indica
con K la matrice coniugata, ossia quella che ha elementi k
ij
= a
ij
jb
ij
.
Data una matrice complessa K, si chiama matrice aggiunta K
la matrice traspo-
sta coniugata, K
= K
T
= K
T
. Alcuni testi indicano questa matrice con il simbolo
K
oppure con il simbolo K
H
.
Una matrice reale quadrata si dice simmetrica se A = A
T
, una matrice complessa
si dice autoaggiunta o hermitiana se K = K
. In una matrice reale simmetrica vi
sono al pi` u
n(n + 1)
2
elementi indipendenti.
Una matrice quadrata si dice diagonale se a
ij
= 0 per i ,= j
A
nn
= diag(a
i
) =
_
_
_
_
_
a
1
0 0
0 a
2
0
.
.
.
.
.
.
.
.
.
.
.
.
0 0 a
n
_
_
_
_
_
Una matrice diagonale `e sempre simmetrica.
Una matrice quadrata Asi dice antisimmetrica se A = A
T
; dati i vincoli imposti
da questa relazione, la matrice antisimmetrica ha la seguente struttura
A
nn
=
_
_
_
_
_
0 a
12
a
1n
a
12
0 a
2n
.
.
.
.
.
.
.
.
.
.
.
.
a
1n
a
2n
0
_
_
_
_
_
In una matrice antisimmetrica vi sono al pi` u
n(n 1)
2
elementi indipendenti e non
nulli. Vedremo in seguito alcune importanti propriet`a delle matrici antisimmetriche
3 3.
1.2 Operazioni sulle matrici
Le matrici sono elementi di unalgebra (lineare) detta algebra della matrici .
3
Ricordiamo che, in generale, unalgebra `e uno spazio lineare (vettoriale) con
laggiunta di un operatore (prodotto) bilineare.
1
Uno spazio lineare `e una struttura matematica in cui sono deniti gli elementi dello
spazio, che indicheremo, per il caso che stiamo trattando, con il simbolo maiuscolo
grassetto A, e alcune altre condizioni, qui di seguito elencate:
1) `e denita unoperazione di somma, indicata con il simbolo +; la somma deve
essere commutativa. Esiste un elemento neutro rispetto alla somma detto O.
Esso prende il nome di elemento nullo (relativamente alla somma).
2) per ogni elemento A dello spazio, data una variabile reale o complessa
2
,
esiste loperazione di prodotto per , tale che A appartiene ancora allo spazio.
Inoltre, date due variabili scalari e ,
(a) vale la propriet`a associativa rispetto al prodotto degli scalari: (A) =
()A;
(b) vale la propriet`a distributiva rispetto alla somma: (A+B) = A+B;
(c) vale la propriet`a distributiva rispetto al prodotto per scalare: ( + )A =
A+ A;
Nel caso particolare delle matrici queste propriet`a generali prendono le forme
particolari descritte nel seguito.
Prodotto per scalare
A =
_
_
_
_
_
a
11
a
12
a
1n
a
21
a
22
a
2n
.
.
.
.
.
.
.
.
.
.
.
.
a
m1
a
m2
a
mn
_
_
_
_
_
=
_
_
_
_
_
a
11
a
12
a
1n
a
21
a
22
a
2n
.
.
.
.
.
.
.
.
.
.
.
.
a
m1
a
m2
a
mn
_
_
_
_
_
Somma di matrici
A+B =
_
_
_
_
_
a
11
+ b
11
a
12
+ b
12
a
1n
+ b
1n
a
21
+ b
21
a
22
+ b
22
a
2n
+ b
2n
.
.
.
.
.
.
.
.
.
.
.
.
a
m1
+ b
m1
a
m2
+ b
m2
a
mn
+ b
mn
_
_
_
_
_
Per poter essere sommate, le matrici devono avere le stesse dimensioni.
Valgono le seguenti propriet`a, che sono state genericamente aermate nella con-
dizione 1) precedente:
A+O = A
A+B = B +A
(A+B) +C = A+ (B +C)
(A+B)
T
= A
T
+B
T
1
per bilinearit`a si intende la linearit`a rispetto a entrambi gli operandi.
2
ci limiteremo a considerare il caso di reale.
4
Lelemento neutro o nullo O prende il nome di matrice nulla. Loperazione dierenza
viene denita con lausilio dello scalare = 1:
AB = A+ (1)B.
Prodotto di matrici
Indicheremo per ora loperatore prodotto con il simbolo , ma nelluso comune esso
viene quasi sempre omesso, come si usa fare per il simbolo di prodotto tra grandezze
scalari.
Loperazione si eettua con la ben nota regola riga per colonna: il generico
elemento c
ij
della matrice prodotto C
mp
= A
mn
B
np
vale
c
ij
=
n
k=1
a
ik
b
kj
La propriet`a di bilinearit`a del prodotto tra matrici `e garantita, in quanto si verica
immediatamente che, dato uno scalare generico , vale la seguente identit`a:
(A B) = (A) B = A (B)
Valgono le seguenti propriet`a, anchesse genericamente ssate nelle condizioni 2) (a)-
(c) precedenti:
A B C = (A B) C = A (B C)
A (B +C) = A B +A C
(A+B) C = A C +B C
(A B)
T
= B
T
A
T
In generale si verica quanto segue:
il prodotto tra matrici non `e commutativo: A B ,= B A, salvo in casi
particolari;
A B = A C non implica B = C, salvo in casi particolari;
A B = O non implica che sia A = O oppure B = O, salvo in casi particolari.
Esiste un elemento neutro rispetto al prodotto, che prende il nome di matrice
identit` a e viene indicata con I
n
oppure semplicemente I quando non ci sono ambiguit`a
nella dimensione; data una matrice rettangolare A
mn
si ha
A
mn
= I
m
A
mn
= A
mn
I
n
.
Oltre a queste operazioni fondamentali, esistono altre funzioni su matrici che
elencheremo brevemente nel seguito.
Potenza di matrice
Data una matrice quadrata A R
nn
, la potenza k-esima di matrice vale
A
k
= A A A k volte
Una matrice si dice idempotente se
A
2
= A.
5
Traccia
La traccia di una matrice quadrata A
nn
`e la somma dei suoi elementi diagonali
tr (A) =
n
k=1
a
kk
La traccia di una matrice soddisfa le seguenti propriet`a
tr (A+ B) = tr (A) + tr (B)
tr (AB) = tr (BA)
tr (A) = tr (A
T
)
tr (A) = tr (T
1
AT) per T non singolare (vedi oltre)
Determinante
Data la matrice A R
nn
, indichiamo con A
(ij)
la matrice quadrata di dimensioni
(n1)(n1) ottenuta cancellando la i-esima riga e la j-esima colonna della matrice
A. Ad esempio, data la matrice
A =
_
_
_
_
1 5 3 2
6 4 9 7
7 4 8 2
0 9 2 3
_
_
_
_
si ha
A
(23)
=
_
_
1 5 2
7 4 2
0 9 3
_
_
Si denisce minore di ordine p di una matrice A
mn
il determinante D
p
di una
sottomatrice quadrata ottenuta selezionando p righe e p colonne qualsiasi di A
mn
.
Esistono tanti minori quante sono le scelte possibili di p su m righe e p su n colonne.
Si deniscono minori principali di ordine k di una matrice A
mn
i determinanti
D
k
, con k = 1, , minm, n, ottenuti selezionando le prime k righe e k colonne
della matrice A
mn
.
Si denisce minore complementare D
rc
di un generico elemento a
rc
di una matrice
quadrata A
nn
il determinante di A
(rc)
D
rc
= det(A
(rc)
).
Si denisce complemento algebrico o cofattore (in inglese cofactor) di un elemento
a
rc
di una matrice quadrata A
nn
il prodotto
A
rc
= (1)
r+c
D
rc
Una volta denito il complemento algebrico si pu`o denire il determinante di A.
Fissata una qualsiasi riga i, si ha la denizione per riga:
det (A) =
n
k=1
a
ik
(1)
i+k
det (A
(ik)
) =
n
k=1
a
ik
A
ik
6
oppure, ssata una qualsiasi colonna j, si ha la denizione per colonna:
det (A) =
n
k=1
a
kj
(1)
k+j
det (A
(kj)
) =
n
k=1
a
kj
A
kj
Poiche le precedenti denizioni sono ricorsive e coinvolgono i determinanti di minori
via via pi` u piccoli, occorre denire il determinante della matrice 1 1, che vale
det (a
ij
) = a
ij
.
In generale si hanno le propriet`a seguenti:
det(A B) = det(A) det(B);
det(A
T
) = det(A);
det(kA
nn
) = k
n
det(A
nn
);
se si eettua un numero s di scambi tra righe o tra colonne della matrice A
ottenendo la matrice A
s
, si ha det(A
s
) = (1)
s
det(A);
se la matrice Aha due righe o due colonne uguali o proporzionali, si ha det(A) =
0;
se la matrice Aha una riga o una colonna ottenibile da una combinazione lineare
di altre righe o colonne, si ha det(A) = 0;
se la matrice A
nn
`e triangolare superiore o inferiore, si ha det(A
nn
) =
n
i=1
a
ii
;
se la matrice A
nn
`e triangolare a blocchi, con p blocchi A
ii
sulla diagonale, si
ha det(A
nn
) =
p
i=1
det A
ii
;
Una matrice A si dice singolare se det(A) = 0.
Rango
Si denisce rango (o caratteristica) della matrice A
mn
il numero (A
mn
) denito
come il massimo intero p per cui esiste almeno un minore D
p
non nullo.
Valgono le seguenti propriet`a:
(A) minm, n;
se (A) = minm, n, la matrice A si dice a rango pieno;
(A B) min(A), (B).
(A) = (A
T
);
(A A
T
) = (A
T
A) = (A);
Dora in poi il prodotto tra matrici A B sar`a indicato semplicemente come AB.
7
Matrice aggiunta
Data una matrice quadrata A R
nn
, si denisce matrice aggiunta di A la matrice
quadrata Adj(A) =
ij
i cui elementi
ij
sono deniti come
ij
= (1)
i+j
D
ji
ossia quella matrice che ha come elemento di riga i e colonna j il minore complemen-
tare del corrispondente elemento a
ji
di riga j e colonna i.
Matrice inversa
Data una matrice quadrata A R
nn
si dice invertibile o non singolare se esiste la
matrice inversa A
1
nn
tale che
AA
1
= A
1
A = I
n
La matrice `e invertibile se e solo se (A) = n, ossia `e di rango pieno; ci`o equivale ad
avere det(A) ,= 0.
Linversa si ottiene come:
A
1
=
1
det(A)
Adj(A)
Valgono le seguenti propriet`a:
(A
1
)
1
= A;
(A
T
)
1
= (A
1
)
T
.
Si denisce matrice ortonormale la matrice quadrata per cui A
1
= A
T
. Per
queste matrici vale quindi lidentit`a
A
T
A = AA
T
= I
Date due matrici quadrate di pari dimensioni A e B, vale la seguente identit`a
(AB)
1
= B
1
A
1
Esiste un importante risultato, chiamato Lemma dinversione, che stabilisce quanto
segue: se A e C sono matrici quadrate invertibili e B e D sono matrici di dimensioni
opportune, allora
(A+BCD)
1
= A
1
A
1
B(DA
1
B +C
1
)
1
DA
1
La matrice (DA
1
B +C
1
) deve essere anchessa invertibile.
Se la matrice quadrata A(t) `e composta da elementi a
ij
(t) tutti derivabili nel
tempo t, allora la derivata della matrice vale
d
dt
A(t) =
A(t) =
_
d
dt
a
ij
(t)
_
= [ a
ij
(t)]
8
Se la matrice quadrata A(t) ha rango (A(t)) = n per ogni valore del tempo t, allora
la derivata della sua inversa vale
d
dt
A(t)
1
= A
1
(t)
A(t)A(t)
1
La matrice inversa, quando esiste, permette risolvere la trasformazione lineare
y = Ax
in funzione dellincognita x, come
x = A
1
y.
Decomposizione di matrice
Data una matrice quadrata A, `e sempre possibile decomporla in una somma di due
matrici, come segue:
A = A
s
+A
a
(1.1)
dove
A
s
=
1
2
(A+A
T
)
`e una matrice simmetrica e
A
a
=
1
2
(AA
T
)
`e una matrice antisimmetrica (vedi Sezione 1.4).
Data una matrice reale di dimensioni qualsiasi A R
mn
, risultano simmetriche
entrambe le matrici seguenti
A
T
A R
nn
AA
T
R
mm
Trasformazioni di similarit`a
Data una matrice quadrata A R
nn
e una matrice quadrata non singolare T
R
nn
, la matrice B R
nn
ottenuta come
B = T
1
AT oppure B = TAT
1
si dice similare ad A e la trasformazione si dice di similarit` a. Se la matrice A `e
similare alla matrice diagonale = diag(
i
)
A = TT
1
si pu`o scrivere
AT = T
e se indichiamo con t
i
la i-esima colonna di T, ossia
T =
_
t
1
t
n
_
avremo la nota formula che lega autovalori e autovettori (vedi Paragrafo 1.2.1)
At
i
=
i
t
i
e quindi potremo dire che le costanti
i
sono gli autovalori di A e i vettori t
i
sono gli
autovettori di A, in generale non normalizzati.
9
1.2.1 Autovalori e autovettori
Data una matrice quadrata A
nn
, si chiamano autovalori della matrice (in inglese
eigenvalue) le soluzioni
i
(reali o complesse) dellequazione caratteristica
det(I A) = 0
det(I A) `e un polinomio in , detto polinomio caratteristico.
Se gli autovalori sono tutti distinti, si chiamano autovettori (in inglese eigenvector)
i vettori u
i
che soddisfano lidentit`a
Au
i
=
i
u
i
Se gli autovalori non sono tutti distinti, si ottengono autovettori generalizzati, la
cui determinazione va oltre gli scopi di questa Appendice.
Geometricamente gli autovettori rappresentano quelle particolari direzioni nel-
lo spazio R
n
, in cui si applica la trasformazione lineare rappresentata da A, che si
trasformano in se stesse; sono quindi le direzioni invarianti rispetto alla trasformazio-
ne A e gli autovalori forniscono le rispettive costanti di scalamento lungo queste
direzioni.
Linsieme degli autovalori di una matrice A sar`a indicato con (A) oppure con
i
(A); linsieme degli autovettori di A sar`a indicato con u
i
(A). In generale,
essendo gli autovettori delle rappresentazioni di direzioni invarianti rispetto alla tra-
sformazione rappresentata da A, essi sono deniti a meno di una costante, ossia
possono o meno essere normalizzati; tuttavia `e convenzione tacita che essi abbiano
norma unitaria, salvo quando altrimenti dichiarato.
Propriet`a degli autovalori
Data una matrice A e i suoi autovalori
i
(A), sar`a
i
(A+ cI) = (
i
(A) + c)
Data una matrice A e i suoi autovalori
i
(A), sar`a
i
(cA) = (c
i
(A)
Data una matrice triangolare (superiore o inferiore)
_
_
_
_
_
a
11
a
12
a
1n
0 a
22
a
2n
.
.
.
.
.
.
.
.
.
.
.
.
0 0 a
nn
_
_
_
_
_
,
_
_
_
_
_
a
11
0 0
a
21
a
22
0
.
.
.
.
.
.
.
.
.
.
.
.
a
n1
a
n2
a
nn
_
_
_
_
_
i suoi autovalori sono gli elementi sulla diagonale
i
(A) = a
ii
; lo stesso vale per
una matrice diagonale.
Data una matrice A
nn
e i suoi autovalori
i
(A), sar`a
det(A) =
n
i=1
i
10
e
tr (A) =
n
i=1
i
Data una qualunque trasformazione invertibile, rappresentata dalla matrice T, gli
autovalori di A sono invarianti alle trasformazioni di similarit` a
A = T
1
AT
ossia
i
(
A) =
i
(A)
Se costruiamo una matrice di trasformazione M ordinando per colonne gli autovettori
normalizzati u
i
(A)
M =
_
u
1
u
n
_
allora la trasformazione di similarit`a fornisce una matrice diagonale
=
_
_
_
_
_
1
0 0
0
2
0
.
.
.
.
.
.
.
.
.
.
.
.
0 0
n
_
_
_
_
_
= M
1
AM
La matrice M si chiama matrice modale. indexmatrice!modale
Se la matrice A `e simmetrica, i suoi autovalori sono tutti reali e si ha lidentit`a
= M
T
AM
In questo caso la matrice M `e ortonormale.
1.2.2 Decomposizione ai valori singolari
Data una matrice A R
mn
qualsiasi, di rango r = (A) s con s = minm, n,
essa si pu`o fattorizzare secondo la decomposizione ai valori singolari , come segue:
A = UV
T
=
s
i=1
i
p
i
q
T
i
(1.2)
dove:
i
(A) 0 sono detti valori singolari e coincidono con le radici quadrate non
negative degli autovalori della matrice simmetrica A
T
A:
i
(A) =
_
i
(A
T
A)
i
0
ordinati in ordine decrescente
1
2
s
0
se r < s vi sono r valori singolari positivi
1
2
r
> 0;
r+1
= =
s
= 0
11
U `e una matrice (mm) ortonormale
U =
_
u
1
u
m
_
contenente per colonne gli autovettori u
i
della matrice AA
T
V `e una matrice n n ortonormale
V =
_
v
1
v
n
_
contenente per colonne gli autovettori v
i
della matrice A
T
A
`e una matrice (mn) con la seguente struttura
se m < n =
_
s
O
_
se m = n =
s
se m > n =
_
s
O
_
.
La matrice
s
= diag(
i
) `e diagonale di dimensioni s s e contiene sulla
diagonale i valori singolari:
Alternativamente, possiamo decomporre la matrice A nel modo seguente, che `e
del tutto analogo a quello descritto in (1.2), ma mette in evidenza i soli valori singolari
positivi:
A =
_
P
P
_
. .
U
_
r
O
O O
_
. .
_
Q
T
Q
T
_
. .
V
T
= P
r
Q
T
(1.3)
dove
P `e una matrice ortonormale mr,
P `e una matrice ortonormale m(mr);
Q `e una matrice ortonormale n r, Q
T
`e una matrice ortonormale n (n r);
r
`e una matrice diagonale r r che contiene sulla diagonale i valori singolari
positivi
i
, i = 1, , r.
Il rango r della matrice A `e pari al numero r s di valori singolari non nulli.
Data una matrice A R
mn
qualsiasi, le due matrici A
T
A e AA
T
sono simme-
triche, hanno gli stessi valori singolari positivi e dieriscono soltanto per il numero di
valori singolari nulli.
1.3 Vettori e spazi vettoriali
Un vettore pu`o essere semplicemente interpretato come una particolare matrice co-
lonna di dimensioni n 1:
v =
_
_
_
_
_
v
1
v
2
.
.
.
v
n
_
_
_
_
_
12
Esso gioca un ruolo fondamentale in molti campi dellingegneria, dalla modellistica dei
sistemi dinamici alla cinematica dei corpi rigidi nello spazio tridimensionale, dalle-
lettromagnetismo alla statica per citarne solo alcuni permettendo di passare age-
volmente dalla rappresentazione algebrica di un fenomeno alla sua rappresentazione
geometrica e viceversa.
In generale, un vettore `e un elemento di uno spazio vettoriale. Nella Sezione 1.2
abbiamo gi`a fatto conoscenza con gli spazi vettoriali delle matrici. Ora ne daremo
una denizione pi` u completa.
1.3.1 Spazio vettoriale
Come detto sopra, gli elementi di uno spazio vettoriale rappresentano entit`a assai utili
nello studio di molti settori dellingegneria e della sica classica e moderna [3].
Dato un campo
3
qualsiasi T, lo spazio vettoriale (in inglese vector space) V(T),
`e linsieme di quegli elementi, chiamati vettori , che soddisfano le seguenti propriet`a
assiomatiche:
1. esiste loperazione +, detta somma vettoriale, tale che V(T); + forma un
gruppo abeliano; lelemento identit`a `e chiamato 0;
2. per ogni T e ogni v V(T), esiste un vettore v V(T); inoltre per ogni
, T e ogni v, w V(T) valgono le seguenti propriet`a:
associativa rispetto al prodotto per scalare: (v) = ()v
identit`a rispetto al prodotto per scalare: 1(v) = v; v
distributiva rispetto alla somma vettoriale: (v +w) = v + w
distributiva rispetto al prodotto per scalare: ( + )v = v + v
(1.4)
Uno spazio vettoriale `e detto reale se T = R, `e detto complesso se T = C.
Esempio classico di spazio vettoriale reale `e quello rappresentato da n-ple di reali,
V
n
(R) = R
n
; in questi casi un elemento (vettore) viene rappresentato per componenti
v =
_
_
_
_
_
v
1
v
2
.
.
.
v
n
_
_
_
_
_
, v R
n
, v
i
R
Poiche le propriet`a (1.4) inducono una struttura lineare sullo spazio V, esso viene
indicato anche con il termine di spazio vettoriale lineare o semplicemente spazio lineare
(in inglese linear vector space o semplicemente linear space).
Il termine vettore ha un signicato molto ampio, nel senso che essa include
entit`a matematiche in apparenza anche molto diverse. Ad esempio, non solo le n-ple
di reali, ma anche le sequenze innite di numeri reali o complessi, le funzioni continue
che assumono valori reali nellintervallo [a, b], i polinomi a coecienti complessi deniti
nellintervallo [a, b] ecc. [7].
Come si pu`o notare, tra gli assiomi dello spazio vettoriale non compare alcuna
operazione di prodotto.
3
per le denizioni di campo e gruppo, vedere [2, Appendice A]
13
Per questo motivo la struttura dello spazio vettoriale, ossia linsieme di propriet`a
che derivano dagli assiomi, non permette di denire concetti geometrici quali langolo o
la distanza, che invece sono impliciti nella denizione puramente geometrica di vettore.
Per consentire di denire tali concetti `e necessario dotare lo spazio vettoriale di una
struttura quadratica o metrica. Lintroduzione di una metrica in uno spazio vettoriale
genera unalgebra che rende possibile lesecuzione di calcoli su oggetti geometrici. La
metrica pi` u comune `e quella indotta dalla denizione di prodotto scalare.
Prima di passare alla denizione di questo prodotto, riassumiamo brevemente
alcune propriet`a delle funzioni lineari.
1.3.2 Funzioni lineari
Dati due spazi vettoriali U(T) e V(T), che per comodit`a assumiamo deniti entrambi
sul campo T, una funzione L : U V si dice lineare, se per ogni a, b U e T
valgono i seguenti assiomi:
L(a +b) = L(a) +L(b) = La +Lb
L(a) = L(a) = La
(1.5)
La funzione lineare L : U U viene anche chiamata operatore lineare, trasformazione
lineare, applicazione lineare oppure endomorsmo (in inglese endomorphism).
Linsieme di tutte le funzioni lineari L : U V forma, a sua volta, uno spazio
lineare vettoriale L(T).
Linsieme delle funzioni lineari L : U U forma un anello, indicato con il simbolo
End(U).
Ricordiamo inne che qualsiasi funzione o trasformazione lineare da U a V `e rap-
presentabile con una matrice quadrata A R
mn
, dove m e n sono le dimensioni
(vedere pi` u oltre la denizione di dimensione) rispettivamente di V e U.
Indipendenza lineare Base Dimensione
Dati n vettori qualsiasi a
i
V(T), un vettore generico v V(T) `e detto combinazione
lineare di a
1
, a
2
, . . . , a
n
se esso pu`o essere scritto come
v = v
1
a
1
+ v
2
a
2
+ v
n
a
n
con v
i
T. Linsieme di vettori a
1
, a
2
, . . . , a
n
`e detto linearmente indipendente
se nessun a
i
pu`o essere scritto come combinazione lineare dei restanti a
j
, j ,= i. In
altre parole, lunica soluzione dellequazione
v
1
a
1
+ v
2
a
2
+ v
n
a
n
= 0
`e quella con v
1
= v
2
= = v
n
= 0. In caso contrario si dice che a
i
`e linearmente
dipendente dagli altri vettori.
Nella combinazione lineare v = v
1
a
1
+ v
2
a
2
+ v
n
a
n
, se tutti i vettori a
i
so-
no linearmente indipendenti, allora gli scalari v
i
sono unici e prendono il nome di
coordinate o componenti di v.
Le combinazioni lineari di vettori linearmente indipendenti a
1
, a
2
, . . . , a
k
, con
k n, formano un sottospazio S(T) V(T). Si dice che questo sottospazio `e coperto
o descritto (in inglese spanned) da a
1
, a
2
, . . . , a
k
.
14
Ogni insieme di vettori a
1
, a
2
, . . . , a
n
che risulti linearmente indipendente, for-
ma una base in V. Tutte le basi in V hanno lo stesso numero di elementi (nel nostro
caso n), che prende il nome di dimensione dello spazio e si indica con dim(V).
1.3.3 Matrici come rappresentazione di operatori lineari
Dati due spazi vettoriali A R
n
e } R
m
, aventi rispettivamente dimensioni n e
m, e dati due generici vettori x A e y }, la pi` u generica trasformazione lineare
tra gli spazi si pu`o rappresentare attraverso loperatore matriciale A R
mn
, come
segue:
y = Ax; x R
n
; y R
m
.
Quindi una matrice pu`o essere sempre interpretata come un operatore che prende
un vettore dello spazio di partenza A e lo trasforma in un vettore dello spazio
di arrivo }. Qualunque trasformazione lineare ha (almeno) una matrice che la
rappresenta e, di converso, qualunque matrice `e la rappresentazione di una qualche
trasformazione lineare.
Si denisce spazio immagine (in inglese range) della trasformazione A il sottospa-
zio di } denito dalla seguente propriet`a:
(A) = y [ y = Ax, x A; (A) }
Si denisce spazio nullo (in inglese kernel o null-space) della trasformazione A il
sottospazio di A denito dalla seguente propriet`a:
^(A) = x [ 0 = Ax, x A; ^(A) A
Lo spazio nullo rappresenta cio`e tutti quei vettori di A che vengono trasformati nel
vettore nullo (lorigine) di }.
Le dimensioni dello spazio immagine e dello spazio nullo si chiamano, rispettiva-
mente, rango (A) (che abbiamo gi`a denito in 1.2) e nullit` a (A):
(A) = dim((A)); (A) = dim(^(A)).
Se A e } hanno dimensioni nite, e questo `e il nostro caso in quanto A R
n
e
} R
m
, allora valgono le seguenti relazioni:
^(A) = (A
T
)
(A) = ^(A
T
)
^(A)
= (A
T
)
(A)
= ^(A
T
)
dove il simbolo indica il complemento ortogonale al (sotto-)spazio corrispondente.
Ricordiamo che 0
= R.
Vale anche la seguente decomposizione ortogonale degli spazi A e } (vedere [9] e
[10])
A = ^(A) ^(A)
= ^(A) (A
T
)
} = (A) (A)
= (A) ^(A
T
)
dove il simbolo indica la somma diretta tra due sottospazi.
15
1.3.4 Inversa generalizzata
Data una matrice reale qualsiasi A R
mn
, con m ,= n, la matrice inversa non risulta
denita. Tuttavia, `e possibile denire una classe di matrici, dette pseudo-inverse,
inverse generalizzate o 1-inverse A
, che soddisfano la seguente relazione:
AA
A = A
Se la matrice A ha rango pieno, ossia (A) = minm, n, `e possibile denire due
classi di matrici inverse generalizzate particolari
se m < n (ossia (A) = m), linversa destra di A `e quella matrice A
d
R
nm
per cui
AA
d
= I
mm
se n < m (ossia (A) = n), linversa sinistra di A `e quella matrice A
s
R
nm
per cui
A
s
A = I
nn
Tra le molte inverse destre e sinistre concepibili, due sono particolarmente importanti:
pseudo-inversa destra (m < n):
A
+
d
= A
T
(AA
T
)
1
che rappresenta una particolare inversa destra. Si pu`o dimostrare che quando
(A) = m allora (AA
T
)
1
esiste.
pseudo-inversa sinistra (n < m):
A
+
s
= (A
T
A)
1
A
T
che rappresenta una particolare inversa sinistra. Si pu`o dimostrare che quando
(A) = n allora (A
T
A)
1
esiste.
Questa particolare pseudo-inversa sinistra prende anche il nome di pseudo-
inversa di Moore-Penrose. In generale, anche se A
T
A non risulta invertibile, si
pu`o sempre denire una pseudo-inversa di Moore-Penrose, che `e quella matrice
A
+
che soddisfa le seguenti relazioni:
AA
+
A = A
A
+
AA
+
= A
+
(AA
+
)
T
= AA
+
(A
+
A)
T
= A
+
A
(1.6)
Queste due pseudo-inverse coincidono con la matrice inversa quando A`e quadrata
e ha rango pieno:
A
1
= A
+
d
= A
+
s
La trasformazione lineare associata alla matrice A R
mn
y = Ax, (1.7)
16
con x R
n
e y R
m
, `e equivalente ad un sistema di m equazioni lineari in n
incognite, i cui coecienti sono dati dagli elementi di A; questo sistema lineare pu`o
non ammettere soluzioni, ammetterne una sola o ammetterne un numero innito [10].
Se vogliamo utilizzare le pseudo-inverse denite sopra per risolvere il sistema li-
neare in (1.7), dobbiamo distinguere due casi, sempre nellipotesi che il rango di A
sia pieno:
m < n: abbiamo pi` u incognite che equazioni; allora, tra le innite soluzioni
possibili x R
n
, scegliamo convenzionalmente quella che ha norma |x| minima,
che viene individuata da
x = A
+
d
y = A
T
(AA
T
)
1
y
Tutte le altre possibili soluzioni di y = Ax si ottengono come
x = x +v = A
+
d
y +v
dove v ^(A) `e un vettore dello spazio nullo di A, che ha dimensioni n m.
Queste possibili soluzioni si possono anche esprimere in una forma alternativa,
ovvero
x = A
+
d
y + (I A
+
d
A)w
dove w R
n
`e un vettore n1 qualsiasi. La matrice I A
+
d
A proietta w nello
spazio nullo di A, trasformandolo in v ^(A); essa prende il nome di matrice
di proiezione.
n < m: abbiamo pi` u equazioni che incognite; allora non esistono soluzioni
esatte alla y = Ax, ma solo soluzioni approssimate, tali per cui esiste un er-
rore e = Ax y ,= 0. Tra queste possibili soluzioni approssimate si sceglie
convenzionalmente quella che minimizza la norma dellerrore, ossia
x = arg min
xR
n
|Ax y|
Essa vale
x = A
+
s
y = (A
T
A)
1
A
T
y
e geometricamente consiste nella proiezione ortogonale di y sul complemento
ortogonale di ^(A), ovvero sul sottospazio (A
T
). Lerrore di approssimazione,
detto anche errore di proiezione, vale in questo caso
e = (I AA
+
s
)y
e la sua norma `e minima, come detto sopra.
La somiglianza tra la matrice di proiezione I A
+
d
A e la matrice che fornisce
lerrore di proiezione I AA
+
s
verr`a spiegata nella Sezione 1.3.6.
Per calcolare le inverse generalizzate, si pu`o utilizzare la decomposizione ai valori
singolari; in particolare, ricordando la (1.3), la pseudo-inversa vale
A
+
= V
_
1
r
O
O O
_
U
T
= Q
1
r
P
T
.
17
1.3.5 Prodotti tra vettori
Abbiamo visto nella Sezione 1.3.1 che la denizione assiomatica di spazio vettoriale
non comprenda anche la denizione di un prodotto, mentre per calcolare con enti
geometrici `e spesso necessario introdurre sia un prodotto sia una struttura quadratica
o metrica, che possa fornire la misura degli elementi che si manipolano; una delle
metriche pi` u comuni `e quella derivata dal prodotto scalare o interno tra vettori.
Prodotto scalare e norma di vettore
Dati due vettori reali a, b V(R), il prodotto scalare o interno (in inglese scalar o
inner product) a b `e un numero reale che pu`o venire denito sia in modo geometrico
sia in modo analitico (per componenti):
denizione geometrica: a b = |a| |b| cos (1.8)
denizione analitica: a b =
k
a
k
b
k
= a
T
b (1.9)
dove |a| `e la lunghezza del vettore a e , (0
180
) `e langolo compreso tra a
e b. Alcuni testi indicano il prodotto scalare con il simbolo a, b).
Il prodotto scalare soddisfa le seguenti propriet`a:
`e distributivo rispetto alla somma: (a +b) c = a c +b c
`e distributivo rispetto al prodotto per scalare: (a b) = (a) b = a (b)
`e commutativo: a b = b a
`e positivo: a a > 0, a ,= 0
(1.10)
La denizione geometrica di prodotto scalare implica di aver preventivamente de-
nito il concetto di angolo e di lunghezza, mentre nellapproccio analitico la lunghezza
ovvero la norma (in inglese norm) pu`o essere denita come grandezza derivata dal
prodotto scalare
|a| =
a a =
k
a
2
k
=
a
T
a (1.11)
e langolo tra a e b come
= cos
1
_
a b
|a| |b|
_
Si chiamano spazi euclidei o cartesiani quelli per i quali `e denita la norma euclidea
(1.11).
La norma euclidea derivata dal prodotto scalare non `e lunica norma possibile
per misurare le dimensioni di un vettore. In generale la norma di un vettore deve
soddisfare le seguenti tre propriet`a (assiomi della norma):
1. |x| > 0 per ogni x ,= 0, |x| = 0 se e solo se x = 0;
2. |x +y| |x| +|y| (diseguaglianza triangolare);
3. |x| = [[ |x| per ogni scalare e ogni x.
18
Generalizzando la norma euclidea, possiamo denire la p-norma ||
p
come
|x|
p
=
_
k
[a
k
[
p
_
1/p
Tra le p-norme pi` u usate nei vari campi della matematica e dellingegneria ricordiamo:
la norma 2 o euclidea p = 2 |x|
2
=
x
T
x
la norma 1 p = 1 |x|
1
=
k
[a
k
[
la norma o max-norma p = |x|
= max
k
[x
k
[
Si denisce versore un generico vettore diviso per la sua norma
u =
x
|x|
; |u| = 1.
Il prodotto scalare opera tra due vettori e genera uno scalare, mentre in generale
vorremmo poter denire un prodotto pi` u generale che operi su due vettori e generi
come risultato ancora un vettore.
`
E possibile denire questultimo prodotto anche nel caso generale di vettori appar-
tenenti a spazi n-dimensionali, ma per i ni che ci proponiamo `e suciente limitarsi
al caso tridimensionale, in cui possiamo denire il cosiddetto prodotto vettoriale.
Prodotto vettoriale o esterno
Nel caso particolare di due vettori tridimensionali
x =
_
x
1
x
2
x
3
_
T
e y =
_
y
1
y
2
y
3
_
T
, con x, y R
3
il prodotto vettoriale o esterno
4
(in inglese outer o external o vector product) x y
`e un vettore che soddisfa le relazioni seguenti:
z = x y =
_
_
x
2
y
3
x
3
y
2
x
3
y
1
x
1
y
3
x
1
y
2
x
2
y
1
_
_
(1.12)
La (1.12) pu`o essere scritta come prodotto della matrice antisimmetrica S(x) per il
vettore y:
x y =
_
_
0 x
3
x
2
x
3
0 x
1
x
2
x
1
0
_
_
y = S(x)y
Le propriet`a delle matrici antisimmetriche e i loro utilizzi sono descritte nel paragrafo
1.4.
La norma del prodotto esterno vale
|z| = |x| |y| sin (1.13)
4
Per il prodotto esterno utilizzeremo il simbolo , che `e molto comune nella letteratura
anglosassone; testi italiani usano pi` u spesso il simbolo .
19
dove `e langolo tra i due vettori x e y misurato sul piano xy denito da questi ultimi;
la direzione di z `e ortogonale al piano, il verso `e dato dallapplicazione della regola
della mano destra
5
, per portare x su y compiendo la rotazione di angolo minimo.
Il prodotto vettoriale soddisfa le seguenti propriet`a:
`e non commutativo o anticommutativo: x y = (y x)
`e distributivo rispetto alla somma: x (y +z) = (x y)
`e distributivo rispetto al prodotto per scalare: (x y) = (x) y = x (y)
`e non associativo: x (y z) ,= (x y) z
(1.14)
Dati tre vettori tridimensionali x, y, z, si denisce prodotto triplo il prodotto
esterno triplo non associativo, ossia:
x (y z) = (x z) y (x y) z
(x y) z = (x z) y (y z) x
(1.15)
Dati tre vettori x, y, z, vale inoltre la seguente relazione:
(x y) z = (z y) x (1.16)
Il prodotto vettoriale, come abbiamo visto, `e denito solo in spazi vettoriali di di-
mensione 3; la generalizzazione di questo prodotto a spazi n-dimensionali, con n > 3,
richiede di introdurre le algebre di Cliord [5], cosa che va oltre gli scopi di questa
Appendice.
Prodotto diadico
Dati due vettori x, y R
n
, si denisce prodotto diadico il seguente
x y = xy
T
= D(x, y) =
_
_
_
x
1
y
1
x
1
y
n
.
.
. x
i
y
i
.
.
.
x
n
y
1
x
n
y
n
_
_
_
Si fa notare che alcuni testi anglosassoni chiamano questo prodotto external product,
generando confusione con il prodotto vettoriale.
Risulta immediato dimostrare che il prodotto non `e commutativo, in quanto, in
generale xy
T
,= yx
T
, essendo
D(x, y) = D
T
(y, x)
risulta quindi x y ,= y x.
La matrice D che si ottiene come risultato del prodotto risulta sempre avere rango
(D) = 1, qualunque sia la dimensione n dei vettori di partenza.
Una propriet`a utile che lega il prodotto vettoriale triplo e il prodotto diadico per
vettori tridimensionali `e la seguente
x (y z) = [(x z) I z x] y
(x y) z = [(x z) I x z] y
5
Regola della mano destra: se con le dita della mano destra si accompagna il movimento che
porta x a sovrapporsi a y secondo il percorso a minimo angolo, allora il pollice si allinea lungo xy;
questa `e la stessa regola che denisce i tre versori di un sistema di riferimento cartesiano destrorso.
20
`
E interessante sottolineare che, mentre il prodotto esterno al primo termine delle
equazioni precedenti, `e stato denito solo per vettori tridimensionali, i prodotti al
secondo termine si possono calcolare indipendentemente dalle dimensioni dello spazio
vettoriale.
Altri prodotti
Poiche il prodotto interno `e un prodotto tra vettori che fornisce uno scalare ed il
prodotto esterno non `e associativo, nasce la necessit`a di denire un prodotto ab tra
vettori che obbedisca alla maggior parte delle regole della moltiplicazione ordinaria,
ovvero possegga almeno le propriet`a di essere associativo e distributivo, mentre la
commutativit`a non `e essenziale. Si richiede anche che, nel fare il prodotto, venga
preservata la norma, ossia |ab| = |a| |b|.
Sono stati deniti in passato prodotti tra vettori che soddisfano questi requisiti.
Di solito essi vengono trascurati nei testi elementari di algebra vettoriale. Tra questi,
un qualche interesse per lapplicazione alla cinematica teorica e alla computer vision,
oltreche nella sica quantistica, rivestono il prodotto di Hamilton e il prodotto di
Cliord.
Prodotto di Hamilton
Il prodotto di Hamilton trova la sua giusticazione nellambito della denizione di
prodotto tra quaternioni, entit`a che approfondiremo meglio nellAppendice ??. Qui
ci limitiamo a denire tale prodotto come quel vettore c ottenuto dai vettori a e b
nel modo seguente
c = ab = a b +a b (1.17)
Questo prodotto ha solo pi` u un signicato storico, in quanto presenta la spiacevole
caratteristica di fornire un numero negativo come risultato del prodotto di un vettore
per se stesso
aa = a a +a a = |a|
2
(1.18)
Esso fu presto abbandonato in favore di altri pi` u semplici e utili, come i precedenti
prodotti interno ed esterno, oppure pi` u generali dal punto di vista geometrico, come
il prodotto di Cliord.
Prodotto di Cliord
`
E stato dimostrato che un prodotto vettoriale che permetta di soddisfare gli stessi
assiomi del prodotto tra due numeri reali, ossia la distributivit`a, lassociativit`a e
la commutativit`a, non esiste per spazi vettoriali con dimensioni n 3; se si lascia
cadere lassioma della commutativit`a, si pu`o denire il prodotto di Cliord, dal nome
del matematico inglese William Cliord (1845-79) che per primo lo introdusse. Esso
consente di estendere a spazi vettoriali R
n
, con n > 3, il prodotto esterno denito in
1.3.5.
Limitiamoci in un primo momento, per semplicit`a, al piano R
2
: dati due vettori
a = a
1
i + a
2
j, e b = b
1
i + b
2
j, il prodotto di Cliord risulta essere denito come:
ab = a
1
b
1
+ a
2
b
2
+ (a
1
b
2
a
2
b
1
)e
12
= a b + (a
1
b
2
a
2
b
1
)e
12
(1.19)
21
dove e
12
prende il nome di bivettore. Esso `e denito come larea dotata di segno del
parallelogrammo compreso tra i e j; in un certo senso `e analogo al prodotto esterno
i j, salvo il fatto che questultimo `e interpretato come vettore ortogonale al piano
in cui sono contenuti i e j, mentre il primo `e da interpretarsi come una pezza (in
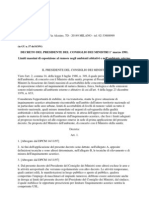
inglese patch) nel medesimo piano, come illustrato in Fig. 1.1.
i
j
12
e
i j
i
j
12
e
i j
Figura 1.1: Il bivettore e
12
nel piano R
3
.
Lestensione allo spazio R
3
si ottiene assumendo che sia vericata per il prodotto
la seguente identit`a:
cc = c
2
= c c (1.20)
se poi consideriamo c = a +b, otteniamo:
(a +b)(a +b) = (a +b) (a +b) (1.21)
da cui segue
ab +ba = 2a b (1.22)
e quindi
ab = 2a b ba (1.23)
Il lettore interessato pu`o fare riferimento al testo [6] per ulteriori approfondimenti.
1.3.6 Proiezioni e matrici di proiezione
Dato uno spazio vettoriale reale V(R
n
) di dimensioni n, dotato di prodotto scalare,
ed un suo sottospazio W(R
k
) di dimensioni k n, `e possibile denire la proiezione
dei vettori v V sul sottospazio W.
Loperatore di proiezione `e denito dalla matrice quadrata di proiezione P
R
nn
, le cui colonne sono le proiezioni degli elementi della base di V in W. Una
matrice `e di proiezione se e solo se P
2
= P ossia se essa `e idempotente. La proie-
zione pu`o essere ortogonale, oppure non ortogonale; nel primo caso la matrice P `e
simmetrica, nel secondo caso no. Se P `e una matrice di proiezione, anche I P lo `e.
Classici esempi di matrici di proiezione ortogonale sono le matrici associate alla
pseudo-inversa sinistra P
1
= AA
+
s
e P
2
= I AA
+
s
e alla pseudo-inversa destra
P
3
= A
+
d
A e P
4
= I A
+
d
A (vedi Sezione 1.3.4).
Dal punto di vista geometrico, P
1
proietta ogni vettore v V nel spazio immagine
(A) (vedi 1.3.3), mentre P
2
proietta v nel suo complemento ortogonale (A)
=
^(A
T
).
22
1.3.7 Norme di matrice
Come per il vettore, `e possibile fornire una misura della grandezza di una matrice,
denendone la norma. Poiche una matrice rappresenta una trasformazione lineare tra
vettori, la norma misura quando grande sia questa trasformazione, ma deve in qualche
modo normalizzare il risultato perche questo non sia inuenzato dalla grandezza
del vettore che viene trasformato, ossia:
|A| = sup
x
|Ax|
|x|
= sup
x=1
|Ax| .
Data una matrice quadrata A R
nn
la sua norma deve soddisfare in generale i
seguenti assiomi generali:
1. |A| > 0 per ogni A ,= O, |A| = 0 se e solo se A = O;
2. |A+B| |A| +|B| (diseguaglianza triangolare);
3. |A| = [[ |A| per ogni scalare e ogni A;
4. |AB| |A| |B|.
Data A R
nn
e i suoi autovalori
i
(A), vale la seguente diseguaglianza
1
_
_
A
1
_
_
[
i
[ |A| i = 1, . . . , n
Fatte queste premesse, elenchiamo le norme di matrice pi` u comunemente adottate,
considerando solo matrici reali
1. norma spettrale:
|A|
2
=
_
max
i
i
(A
T
A)
2. norma di Frobenius:
|A|
F
=
j
a
2
ij
=
_
tr A
T
A
3. massimo valore singolare:
|A|
=
_
max
i
i
(A)
4. norma 1 o max-norma:
|A|
1
= max
j
n
i=1
[a
ij
[
5. norma :
|A|
= max
i
n
j=1
[a
ij
[
In generale |A|
2
= |A|
e |A|
2
2
|A|
1
|A|
23
1.4 Matrici antisimmetriche
Abbiamo visto sopra che una matrice S si dice antisimmetrica quando soddisfa la
seguente propriet`a:
S +S
T
= O (1.24)
Una matrice antisimmetrica ha perci`o tutti zeri sulla diagonale principale ed elementi
fuori dalla diagonale che soddisfano la relazione s
ij
= s
ji
.
Ne segue che una matrice antisimmetrica `e denita da soli
n(n 1)
2
parametri.
Per n = 3 risulta
n(n 1)
2
= 3, per cui la matrice antisimmetrica ha esattamente
tre elementi indipendenti, che possono essere considerati come le componenti di un
generico vettore tridimensionale v; la matrice viene allora indicata come S(v).
Nel seguito studieremo le propriet`a delle matrici antisimmetriche per n = 3, in
quanto sono di fondamentale importanza per denire la cinematica delle rotazioni di
corpi rigidi in spazi tridimensionali.
Se v =
_
v
x
v
y
v
z
_
T
`e un vettore qualsiasi, possiamo denire S(v) come lope-
ratore che trasforma v in una matrice antisimmetrica:
S(v) =
_
_
0 v
z
v
y
v
z
0 v
x
v
y
v
x
0
_
_
(1.25)
e viceversa, data una matrice antisimmetrica qualsiasi, `e sempre possibile estrarre da
essa un vettore v.
La matrice S(v) si indica semplicemente con S quando non si vuole evidenziare
la dipendenza dal vettore v. La propriet`a di antisimmetria comporta la seguente
identit`a:
S
T
(v) = S(v) = S(v) (1.26)
Le matrici antisimmetriche soddisfano la propriet`a di linearit`a; dati due scalari
i
R, vale la propriet`a
S(
1
u +
2
v) =
1
S(u) +
2
S(v) (1.27)
Inoltre, dati due vettori qualsiasi v e u, si ha la seguente importante propriet`a:
S(u)v = u v (1.28)
e quindi S(u) pu`o essere interpretata come loperatore (u) e viceversa.
Da questa propriet`a e dalla anti-commutativit`a del prodotto esterno segue che
S(u)v = S(v)u.
`
E semplice vericare che la matrice S(u)S(u) = S
2
(u) `e simmetrica e verica la
relazione
S
2
(u) = vv
T
|v|
2
I (1.29)
Autovalori e autovettori di matrici antisimmetriche Data la matrice anti-
simmetrica S(v) i suoi autovalori sono immaginari o nulli:
1
= 0,
2,3
= j |v|
Lautovettore relativo allautovalore
1
= 0 vale v; gli altri due sono complessi
coniugati.
24
1.5 Matrici ortogonali e ortonormali
Una generica matrice quadrata U R
n
`e detta ortonormale quando:
la sua inversa coincide con la sua trasposta
UU
T
= U
T
U = I (1.30)
ovvero
U
1
= U
T
(1.31)
Le colonne di U sono tra loro ortogonali e a norma unitaria, come pure le righe.
|U| = 1;
Il determinante di U ha modulo unitario:
[det(U)[ = 1 (1.32)
perci`o esso pu`o valere +1 oppure 1.
Viene chiamata ortogonale quella matrice quadrata per cui vale una relazione
meno forte della (1.30), ovvero
U
T
U =
_
_
_
_
_
1
0 0
0
2
0
.
.
.
.
.
.
.
.
.
.
.
.
0 0
n
_
_
_
_
_
con
ii
,= 0.
Il termine ortonormale viene riservato al caso in cui
ii
= 1.
Il prodotto scalare `e invariante a trasformazioni ortonormali, ossia
(Ux) (Uy) = (Ux)
T
(Uy) = x
T
U
T
Uy = x
T
Iy = x
T
y = x y
Se U `e una matrice ortonormale,
6
di dimensioni opportune, allora |AU| =
|UA| = |A|.
Limitandoci al caso di matrici U
33
, solo 3 dei 9 elementi che compongono la
matrice sono indipendenti, in quanto le condizioni di ortonormalit`a tra le righe o tra
le colonne deniscono 6 vincoli.
Come vedremo nellAppendice ??, le matrici ortonormali U
33
sono la rappre-
sentazione di trasformazioni geometriche di corpi rigidi nello spazio Euclideo: in-
fatti quando det(U) = +1, U rappresenta una rotazione propria, mentre quando
det(U) = 1, U rappresenta una rotazione impropria ovvero una roto-riessione.
Se U `e una matrice ortonormale, vale la propriet`a distributiva
7
rispetto al prodotto
esterno:
U(x y) = (Ux) (Uy) (1.33)
6
La regola vale anche nel caso pi` u generale in cui U sia una matrice unitaria, denita da U
U = I.
7
Questa propriet`a non `e generalmente vera, salvo appunto quando U `e ortonormale.
25
Per ogni matrice di rotazione U e ogni vettore x si dimostra che
US(x)U
T
y = U
_
x (U
T
y)
_
= (Ux) (UU
T
y)
= (Ux) y
= S(Ux)y
(1.34)
dove S(x) `e la matrice antisimmetrica associata a x; si ricavano pertanto le relazioni
seguenti:
US(x)U
T
= S(Ux)
US(x) = S(Ux)U
(1.35)
1.6 Forme bilineari e quadratiche
Si denisce forma bilineare associata alla matrice A R
mn
la variabile scalare
b(x, y) = x
T
Ay = y
T
A
T
x
Si denisce forma quadratica associata alla matrice quadrata A R
nn
la varia-
bile scalare
q(x) = x
T
Ax = x
T
A
T
x
Qualsiasi forma quadratica associata ad una matrice antisimmetrica S(y) `e iden-
ticamente nulla, ossia
x
T
S(y)x 0 (1.36)
per ogni x e ogni y. La dimostrazione di questa propriet`a `e semplice: denendo
w = S(y)x = yx, avremo x
T
S(y)x = x
T
w, ma essendo w ortogonale sia a y sia a
x per denizione, il prodotto scalare x
T
w, e quindi la forma quadratica, sar`a sempre
nullo.
Pertanto, ricordando la decomposizione (1.1), la forma quadratica dipende solo
dalla parte simmetrica A
s
della matrice A:
q(x) = x
T
Ax = x
T
(A
s
+A
a
)x = x
T
A
s
x
Una matrice quadrata A si dice denita positiva se la forma quadratica associata
x
T
Ax soddisfa le condizioni
x
T
Ax > 0 x ,= 0
x
T
Ax = 0 x = 0
Una matrice quadrata A si dice semidenita positiva se la forma quadratica associata
x
T
Ax soddisfa la condizione
x
T
Ax 0 x
Una matrice quadrata A si dice denita negativa se A `e denita positiva; analo-
gamente una matrice quadrata A si dice semidenita negativa se A `e semidenita
positiva.
26
Spesso, per indicare queste matrici si usano le notazioni seguenti:
matrice denita positiva: A ~ 0
matrice semidenita positiva: A _ 0
matrice denita negativa: A 0
matrice semidenita negativa: A _ 0
Condizione necessaria anche la matrice quadrata A sia denita positiva `e che
gli elementi sulla diagonale siano strettamente positivi.
Condizione necessaria e suciente anche la matrice quadrata A sia denita
positiva `e che tutti gli autovalori siano strettamente positivi.
Il criterio di Sylvester aerma che condizione necessaria e suciente anche la
matrice quadrata A sia denita positiva `e che tutti i suoi minori principali siano
strettamente positivi. Una matrice denita positiva ha rango pieno ed `e sempre
invertibile.
La forma quadratica x
T
Ax soddisfa la relazione seguente
min
(A) |x|
2
x
T
Ax
max
(A) |x|
2
dove
min
(A) e
max
(A) sono, rispettivamente, lautovalore minimo e massimo di A.
Una matrice A semidenita positiva ha rango (A) = r < n, ovvero possiede
r autovalori strettamente positivi e n r autovalori nulli. La forma quadratica si
annulla per ogni x ^(A).
Data una matrice reale di dimensioni qualsiasi A R
mn
, abbiamo visto che
sia A
T
A, sia AA
T
sono simmetriche; inoltre abbiamo visto nella Sezione 1.2.2 che
(A
T
A) = (AA
T
) = (A). Si pu`o dimostrare che esse hanno sempre autovalori
reali non negativi, e quindi sono denite o semi-denite positive: in particolare, se la
matrice A ha rango pieno,
se m < n, A
T
A _ 0 e AA
T
~ 0,
se m = n, A
T
A ~ 0 e AA
T
~ 0,
se m > n, A
T
A ~ 0 e AA
T
_ 0.
Data la forma bilineare b(x, y) = x
T
Ay, si deniscono gradienti le seguenti espres-
sioni:
gradiente rispetto a x: grad
x
b(x, y) =
_
b(x, y)
x
_
T
= Ay
gradiente rispetto a y: grad
y
b(x, y) =
_
b(x, y)
y
_
T
= A
T
x
Data la forma quadratica q(x) = x
T
Ax, si denisce gradiente rispetto a x la
seguente espressione:
grad
x
q(x) =
_
q(x)
x
_
T
= 2Ax.
27
Bibliograa
[1] http://ocw.mit.edu/18/18.06/f02/index.htm.
[2] B. Bona. Modellistica dei Robot Industriali. CELID, Torino, 2002.
[3] C. N. Dorny. A Vector Space Approach to Models and Optimization. John Wiley
& Sons, 1975.
[4] F. R. Gantmacher. The Theory of Matrices, volume 2. Chelsea Publishing
Company, 3rd edition, 1989.
[5] P. Lounesto. Cliord Algebras and Spinors. Cambridge University Press, second
edition, 2001.
[6] P. Lounesto. Cliord Algebras and Spinors. Cambridge University Press, second
edition, 2001.
[7] D. G. Luenberger. Optimization by Vector Space Methods. John Wiley & Sons,
1969.
[8] R. Monaco and A. R`epaci. Algebra Lineare: Vettori, Matrici, Applicazioni.
CELID, Torino, 2002.
[9] S. Rinaldi. Algebra Lineare. CLUP, Milano, 1971.
[10] G. Strang. Introduction to Linear Algebra. Wellesey- Cambridge Press, 1998.
28
Indice
1 Matrici e vettori 2
1.1 Denizioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Operazioni sulle matrici . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2.1 Autovalori e autovettori . . . . . . . . . . . . . . . . . . . . . . 10
1.2.2 Decomposizione ai valori singolari . . . . . . . . . . . . . . . . 11
1.3 Vettori e spazi vettoriali . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.3.1 Spazio vettoriale . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.3.2 Funzioni lineari . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.3.3 Matrici come rappresentazione di operatori lineari . . . . . . . 15
1.3.4 Inversa generalizzata . . . . . . . . . . . . . . . . . . . . . . . . 16
1.3.5 Prodotti tra vettori . . . . . . . . . . . . . . . . . . . . . . . . . 18
1.3.6 Proiezioni e matrici di proiezione . . . . . . . . . . . . . . . . . 22
1.3.7 Norme di matrice . . . . . . . . . . . . . . . . . . . . . . . . . . 23
1.4 Matrici antisimmetriche . . . . . . . . . . . . . . . . . . . . . . . . . . 24
1.5 Matrici ortogonali e ortonormali . . . . . . . . . . . . . . . . . . . . . 25
1.6 Forme bilineari e quadratiche . . . . . . . . . . . . . . . . . . . . . . . 26
29
Elenco delle gure
1.1 Il bivettore e
12
nel piano R
3
. . . . . . . . . . . . . . . . . . . . . . . . 22
30
Indice analitico
algebra
delle matrici, 3
lineare, 3
autovalori, 1011
base, 15
bivettore, 22
cofattore, 6
combinazione lineare, 14
complemento algebrico, 6
complemento ortogonale, 15
criterio di Sylvester, 27
decomposizione ai valori singolari, 11,
17
dimensione, 15
distanza, 14
endomorsmo, 14
equazione caratteristica, 10
forma
bilineare, 26
quadratica, 26
gradiente, 27
lemma di inversione, 8
lineare
indipendenza, 14
matrice, 2
aggiunta, 3, 8
antisimmetrica, 3, 2426
autoaggiunta, 3
autovalori, 10
autovettori, 10
denita negativa, 26
denita positiva, 26
determinante, 67
di proiezione, 17, 22
diagonale, 3
hermitiana, 3
idempotente, 5, 22
identit`a, 5
inversa, 8
generalizzata, 1617
inversa destra, 16
inversa sinistra, 16
invertibile, 8
minore, 6
complementare, 6
principale, 6
non singolare, 8
norma di, 23
nulla, 5
ortogonale, 25
ortonormale, 8, 25
pseudo-inversa, 16
di Moore-Penrose, 16
rango, 7, 15
pieno, 7
semi-denita negativa, 26
semi-denita positiva, 26
simmetrica, 3
singolare, 7
traccia, 6
trasposta, 2
triangolare
inferiore, 3
superiore, 2
matrici
algebra delle, 3
metrica, 14
norma, 18
di Frobenius, 23
31
spettrale, 23
nullit`a, 15
operatore lineare, 14, 15
polinomio caratteristico, 10
potenza di matrice, 5
prodotto
di Cliord, 21
di Hamilton, 21
diadico, 20
esterno, 19
interno, 18
scalare, 18
triplo, 20
vettoriale, 19
prodotto di matrici, 5
prodotto per scalare, 4
proiezione, 22
errore di, 17
ortogonale, 22
rango, 7, 15
regola della mano destra, 20
riferimento
destrorso, 20
rotazione
propria, 25
roto-riessione, 25
somma di matrici, 4
somma diretta, 15
spazio
lineare, 13
vettoriale, 13
spazio immagine, 15
spazio lineare, 4
spazio nullo, 15
spazio vettoriale, 1315
trasformazione
di similarit`a, 9, 11
lineare, 15
valori singolari, 11, 17
versore, 19
vettore, 2, 13
colonna, 2
componenti di, 14
norma, 18
prodotti tra, 1822
32
You might also like
- 1077 Cristallo Estate07Document4 pages1077 Cristallo Estate07gigiLombricoNo ratings yet
- GestioneProgetti PDFDocument117 pagesGestioneProgetti PDFgigiLombricoNo ratings yet
- Manuale Web3Document41 pagesManuale Web3gigiLombricoNo ratings yet
- Scheda EtlxDocument5 pagesScheda EtlxgigiLombricoNo ratings yet
- Cost It Uzi One Europe ADocument10 pagesCost It Uzi One Europe AgigiLombricoNo ratings yet
- US105756BR01Document2 pagesUS105756BR01gigiLombricoNo ratings yet
- Thermostatic Heads IT LowDocument24 pagesThermostatic Heads IT LowgigiLombricoNo ratings yet
- Kiid Ir Ishiii Ishares Emerging Markets Local Government Bond Ucits Etf It Ie00b5m4wh52 ItDocument2 pagesKiid Ir Ishiii Ishares Emerging Markets Local Government Bond Ucits Etf It Ie00b5m4wh52 ItgigiLombricoNo ratings yet
- Iprass GuidaDocument24 pagesIprass GuidagigiLombricoNo ratings yet
- Normativa RumoreDocument9 pagesNormativa RumoregigiLombricoNo ratings yet
- ReportDocument10 pagesReportgigiLombricoNo ratings yet
- Manuale QT 2.0Document98 pagesManuale QT 2.0gigiLombricoNo ratings yet
- Lyxor Etf DJ Stoxx 600 Oil & Gas Prospetto CompletoDocument19 pagesLyxor Etf DJ Stoxx 600 Oil & Gas Prospetto CompletogigiLombricoNo ratings yet
- Prospectus Ishares ItDocument74 pagesProspectus Ishares ItgigiLombricoNo ratings yet
- La Macchina Di Watt e La Rivoluzione IndustrialeDocument3 pagesLa Macchina Di Watt e La Rivoluzione IndustrialegigiLombricoNo ratings yet
- Geometria EsamiBonettiDocument22 pagesGeometria EsamiBonettigigiLombricoNo ratings yet
- Prontuario Travi MartiniDocument6 pagesProntuario Travi MartinigigiLombricoNo ratings yet
- Lyxor Etf DJ Stoxx 600 Oil & Gas Prospetto CompletoDocument19 pagesLyxor Etf DJ Stoxx 600 Oil & Gas Prospetto CompletogigiLombricoNo ratings yet
- Settoriali BassaDocument2 pagesSettoriali BassagigiLombricoNo ratings yet
- Settoriali BassaDocument2 pagesSettoriali BassagigiLombricoNo ratings yet
- Settoriali BassaDocument2 pagesSettoriali BassagigiLombricoNo ratings yet
- Lyxor Etf DJ Stoxx 600 Basic ResourcesDocument22 pagesLyxor Etf DJ Stoxx 600 Basic ResourcesgigiLombricoNo ratings yet
- Test of Ebb Raio 1998Document5 pagesTest of Ebb Raio 1998gigiLombricoNo ratings yet
- WWW - Diem.ing - Unibo.it Diem Cali DML Meccanica Tavole e Reg AA2013-2014 Tavola DMA 06-13-14 4sDocument1 pageWWW - Diem.ing - Unibo.it Diem Cali DML Meccanica Tavole e Reg AA2013-2014 Tavola DMA 06-13-14 4sgigiLombricoNo ratings yet
- Lez18 UrtiDocument11 pagesLez18 UrtigigiLombricoNo ratings yet
- Elementi Cap 11Document42 pagesElementi Cap 11gigiLombricoNo ratings yet
- UegbookDocument651 pagesUegbookgigiLombricoNo ratings yet
- Elementi Cap 10Document40 pagesElementi Cap 10gigiLombricoNo ratings yet
- Elementi Cap 12Document35 pagesElementi Cap 12gigiLombricoNo ratings yet
- Elementi Cap 9Document58 pagesElementi Cap 9gigiLombricoNo ratings yet
- L Antica Via Flaminia Luoghi Da ScoprireDocument17 pagesL Antica Via Flaminia Luoghi Da ScoprireDaniela FioraniNo ratings yet
- eBook-Pier Luigi Ighina - Il Profeta Sconosciuto p.321 ORIGINALEDocument320 pageseBook-Pier Luigi Ighina - Il Profeta Sconosciuto p.321 ORIGINALEElora1965100% (1)
- Come Funziona La Gestione Dei Pneumatici Fuori Uso in ItaliaDocument2 pagesCome Funziona La Gestione Dei Pneumatici Fuori Uso in ItaliaEcopneusNo ratings yet
- Superdotato Vuole Aumentare Le DimensioniDocument2 pagesSuperdotato Vuole Aumentare Le Dimensioniwistfulyokel103No ratings yet
- DonnaDocument3 pagesDonnaNico Valente100% (1)
- Acquerello Seconda Edizione Gianluca GarofaloDocument47 pagesAcquerello Seconda Edizione Gianluca Garofaloroberto pittariNo ratings yet
- Paniere Semiotica e Filosofia Dei LinguaggiDocument86 pagesPaniere Semiotica e Filosofia Dei Linguaggifrancescacirrito952No ratings yet