You might also like
- Lect 1Document75 pagesLect 1ybNo ratings yet
- Digital Image ProcessingDocument25 pagesDigital Image ProcessingHatem DheerNo ratings yet
- Correlation and ConvolutionDocument59 pagesCorrelation and ConvolutionDavid LichaaNo ratings yet
- L5 - Strided Conv, LPF, HPFDocument111 pagesL5 - Strided Conv, LPF, HPFAgha KazimNo ratings yet
- Chapter 3 - Filtering - 3Document41 pagesChapter 3 - Filtering - 32021002467.gcetNo ratings yet
- Lecture 2Document29 pagesLecture 2aly869556No ratings yet
- Image Formation: F (X, Y) Reflectance (X, Y) Illumination (X, Y)Document76 pagesImage Formation: F (X, Y) Reflectance (X, Y) Illumination (X, Y)hyfkyhj ;mnk,.No ratings yet
- Lect2 PDFDocument43 pagesLect2 PDFphysicsnewblolNo ratings yet
- Image Processing: Point Processing Filters Dithering Image Compositing Image CompressionDocument51 pagesImage Processing: Point Processing Filters Dithering Image Compositing Image CompressionHussainNo ratings yet
- 02 Image Processing F15Document41 pages02 Image Processing F15Tommy KongNo ratings yet
- Edge 1Document55 pagesEdge 1Kshama PandeyNo ratings yet
- Lecture 3Document64 pagesLecture 3Reema AmgadNo ratings yet
- Sampling and Reconstruction: 15-463: Computational Photography Alexei Efros, CMU, Fall 2007Document55 pagesSampling and Reconstruction: 15-463: Computational Photography Alexei Efros, CMU, Fall 2007Raghu VaranNo ratings yet
- Scratch Detection and Removal From Old VideosDocument19 pagesScratch Detection and Removal From Old VideosAmit KumarNo ratings yet
- Lect3 PDFDocument47 pagesLect3 PDFphysicsnewblolNo ratings yet
- Unit II - Chapter 4 - Edge DetectionDocument43 pagesUnit II - Chapter 4 - Edge Detection2033009mdcsNo ratings yet
- Smallpt: Global Illumination in 99 Lines of C++ A Ray Tracer by Kevin BeasonDocument77 pagesSmallpt: Global Illumination in 99 Lines of C++ A Ray Tracer by Kevin BeasonShubham JalanNo ratings yet
- Motion DetectionDocument33 pagesMotion DetectionChetan TurkaneNo ratings yet
- Lec 7Document39 pagesLec 7Sravankumar KastooriNo ratings yet
- L2v1 Image FormationDocument42 pagesL2v1 Image FormationAgha KazimNo ratings yet
- DIP Unit 2 (Enhancement, Binary, Colour)Document126 pagesDIP Unit 2 (Enhancement, Binary, Colour)Shubham DhundaleNo ratings yet
- Lec 20Document56 pagesLec 20HK KhanNo ratings yet
- 09 Image Filtering Edge Detection 09 PDFDocument15 pages09 Image Filtering Edge Detection 09 PDFBarty WaineNo ratings yet
- Image FilteringDocument17 pagesImage FilteringMohamedTarekNo ratings yet
- Preprocessing Smoothing and DerivativesDocument18 pagesPreprocessing Smoothing and DerivativesVincent NguyenNo ratings yet
- ME4707 Robótica: Herramientas de Visión Computacional IIDocument48 pagesME4707 Robótica: Herramientas de Visión Computacional IICarolina Garcia GuerreroNo ratings yet
- 5 Lecture DIP Image Enhancement Spatial P2 DrTahirNawazDocument61 pages5 Lecture DIP Image Enhancement Spatial P2 DrTahirNawazzain sajidNo ratings yet
- CCD Image Processing: Issues & SolutionsDocument68 pagesCCD Image Processing: Issues & SolutionsSanchita GhoshNo ratings yet
- Lec03 Image ProcDocument67 pagesLec03 Image ProcChristopher Praveen KumarNo ratings yet
- Feature Point Detection and Matching: Matching With Features Matching With FeaturesDocument27 pagesFeature Point Detection and Matching: Matching With Features Matching With Featureshenderson.the.rain.king2819No ratings yet
- 02 SamplingDocument13 pages02 SamplingSatyanarayan Reddy KNo ratings yet
- Edge Detection and LinkingDocument45 pagesEdge Detection and Linkingarya dadhichNo ratings yet
- ConvolutionDocument23 pagesConvolutionsubbu2051No ratings yet
- TMPDocument31 pagesTMPuamiranda3518No ratings yet
- Distinctive Image Feature From Scale-Invariant Keypoints: David G. Lowe, 2004Document27 pagesDistinctive Image Feature From Scale-Invariant Keypoints: David G. Lowe, 2004Wei LiuNo ratings yet
- Image Characteristics Image Digitization Spatial Domain Intensity DomainDocument57 pagesImage Characteristics Image Digitization Spatial Domain Intensity DomainKalirajan KNo ratings yet
- Smallpt Cline SlidesDocument77 pagesSmallpt Cline SlideskingtrueoneNo ratings yet
- Image DenoisingDocument58 pagesImage DenoisingEmon KhanNo ratings yet
- Sesion 7 8Document31 pagesSesion 7 8swarna kuchibhotlaNo ratings yet
- Feature Matching: "What Stuff in The Left Image Matches With Stuff On The Right?"Document62 pagesFeature Matching: "What Stuff in The Left Image Matches With Stuff On The Right?"Lim Yoong KangNo ratings yet
- Edge Detection: CSE 576 Ali FarhadiDocument40 pagesEdge Detection: CSE 576 Ali FarhadiHui ZhaoNo ratings yet
- Lecture 1 Machine Vision 1 2022Document78 pagesLecture 1 Machine Vision 1 2022SamNo ratings yet
- Digital Image Processing Module4Document58 pagesDigital Image Processing Module4kuku84619No ratings yet
- HW 1Document13 pagesHW 1James Yu100% (1)
- Edge Detection & ThresholdingDocument29 pagesEdge Detection & ThresholdingGopi ChandNo ratings yet
- Edge 1Document55 pagesEdge 1MarZiYaNo ratings yet
- Pulse ShappingDocument45 pagesPulse ShappingKarthik GowdaNo ratings yet
- Lecture 3Document37 pagesLecture 3bedline.salesNo ratings yet
- Lecture 9 Image Enhancement - 1st - 2nd OrderDocument55 pagesLecture 9 Image Enhancement - 1st - 2nd OrderCh wahab GujjarNo ratings yet
- Baraniuk IMA Compression June07 FinalDocument87 pagesBaraniuk IMA Compression June07 FinalSenthil MuruganNo ratings yet
- FinalSQ Image ProcessingDocument26 pagesFinalSQ Image Processingsimgeuckun1No ratings yet
- EdgeDetection 0.1haDocument57 pagesEdgeDetection 0.1haDương Lê HồngNo ratings yet
- EEET2465 Lecture 5 Introduction To Digital CommunicationsDocument75 pagesEEET2465 Lecture 5 Introduction To Digital CommunicationsKenny MakNo ratings yet
- Edge DetectionDocument86 pagesEdge Detectionanum_anhNo ratings yet
- Assignment3 40168195Document13 pagesAssignment3 40168195saumya11599No ratings yet
- Lecture3 Histogram Representation and ProcessingDocument29 pagesLecture3 Histogram Representation and ProcessingfuxailNo ratings yet
- ControLogixSIL2 PDFDocument158 pagesControLogixSIL2 PDFGowtham KuppuduraiNo ratings yet
- IAI EC MiniEleCylinderDocument20 pagesIAI EC MiniEleCylinderGowtham KuppuduraiNo ratings yet
- Flexx PumpDocument62 pagesFlexx PumpGowtham KuppuduraiNo ratings yet
- Linx Enterprise: Getting Results GuideDocument61 pagesLinx Enterprise: Getting Results GuideGowtham KuppuduraiNo ratings yet
- Bni Eip-302-105-Z015 PDFDocument20 pagesBni Eip-302-105-Z015 PDFGowtham KuppuduraiNo ratings yet
- Bni Eip-302-105-Z015 PDFDocument20 pagesBni Eip-302-105-Z015 PDFGowtham KuppuduraiNo ratings yet
- As 82667 LR-ZH B Im 96M14150 GB WW 1076-1Document6 pagesAs 82667 LR-ZH B Im 96M14150 GB WW 1076-1Gowtham KuppuduraiNo ratings yet
- Networking BasicsDocument61 pagesNetworking BasicsGowtham KuppuduraiNo ratings yet
- Motion Qs001 - en P Load ObserverDocument8 pagesMotion Qs001 - en P Load ObserverGowtham KuppuduraiNo ratings yet
- Interface ManualDocument22 pagesInterface ManualGowtham KuppuduraiNo ratings yet
- Verilog, HDL, EdaDocument24 pagesVerilog, HDL, EdaGowtham KuppuduraiNo ratings yet
- Using Orientation Codes For Rotation-Invariant Template MatchingDocument9 pagesUsing Orientation Codes For Rotation-Invariant Template MatchingGowtham KuppuduraiNo ratings yet
- 42 Recent Trends in Power SystemsDocument10 pages42 Recent Trends in Power SystemsArshabh Kumar100% (2)
- Modulo EminicDocument13 pagesModulo EminicAndreaNo ratings yet
- Solved Simplex Problems PDFDocument5 pagesSolved Simplex Problems PDFTejasa MishraNo ratings yet
- Huawei R4815N1 DatasheetDocument2 pagesHuawei R4815N1 DatasheetBysNo ratings yet
- DPSD ProjectDocument30 pagesDPSD ProjectSri NidhiNo ratings yet
- Crown WF-3000 1.2Document5 pagesCrown WF-3000 1.2Qirat KhanNo ratings yet
- NDY 9332v3Document8 pagesNDY 9332v3sulphurdioxideNo ratings yet
- SMR 13 Math 201 SyllabusDocument2 pagesSMR 13 Math 201 SyllabusFurkan ErisNo ratings yet
- LEIA Home Lifts Guide FNLDocument5 pagesLEIA Home Lifts Guide FNLTejinder SinghNo ratings yet
- Roleplayer: The Accused Enchanted ItemsDocument68 pagesRoleplayer: The Accused Enchanted ItemsBarbie Turic100% (1)
- Application of Graph Theory in Operations ResearchDocument3 pagesApplication of Graph Theory in Operations ResearchInternational Journal of Innovative Science and Research Technology100% (2)
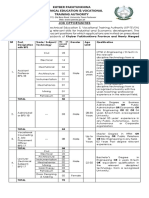
- KP Tevta Advertisement 16-09-2019Document4 pagesKP Tevta Advertisement 16-09-2019Ishaq AminNo ratings yet
- Damodaram Sanjivayya National Law University Visakhapatnam, A.P., IndiaDocument25 pagesDamodaram Sanjivayya National Law University Visakhapatnam, A.P., IndiaSumanth RoxtaNo ratings yet
- PyhookDocument23 pagesPyhooktuan tuanNo ratings yet
- Module 1: Overview of Applied Behaviour Analysis (ABA)Document37 pagesModule 1: Overview of Applied Behaviour Analysis (ABA)PriyaNo ratings yet
- C C C C: "P P P P PDocument25 pagesC C C C: "P P P P PShalu Dua KatyalNo ratings yet
- Project ManagementDocument11 pagesProject ManagementBonaventure NzeyimanaNo ratings yet
- 3 ALCE Insulators 12R03.1Document12 pages3 ALCE Insulators 12R03.1Amílcar Duarte100% (1)
- Homework 1 W13 SolutionDocument5 pagesHomework 1 W13 SolutionSuzuhara EmiriNo ratings yet
- Heterogeneity in Macroeconomics: Macroeconomic Theory II (ECO-504) - Spring 2018Document5 pagesHeterogeneity in Macroeconomics: Macroeconomic Theory II (ECO-504) - Spring 2018Gabriel RoblesNo ratings yet
- Chapter 1 To 5 For Printing.2Document86 pagesChapter 1 To 5 For Printing.2Senku ishigamiNo ratings yet
- ReadmeDocument3 pagesReadmedhgdhdjhsNo ratings yet
- CT SizingDocument62 pagesCT SizingMohamed TalebNo ratings yet
- Pivot TableDocument19 pagesPivot TablePrince AroraNo ratings yet
- Elements of ArtDocument1 pageElements of Artsamson8cindy8louNo ratings yet
- Plaza 66 Tower 2 Structural Design ChallengesDocument13 pagesPlaza 66 Tower 2 Structural Design ChallengessrvshNo ratings yet
- How To Identify MQ Client Connections and Stop ThemDocument26 pagesHow To Identify MQ Client Connections and Stop ThemPurushotham100% (1)
- Revenue and Expenditure AuditDocument38 pagesRevenue and Expenditure AuditPavitra MohanNo ratings yet
- Aleksandrov I Dis 1-50.ru - enDocument50 pagesAleksandrov I Dis 1-50.ru - enNabeel AdilNo ratings yet
- Introduction-: Microprocessor 68000Document13 pagesIntroduction-: Microprocessor 68000margyaNo ratings yet
- (123doc) - Toefl-Reading-Comprehension-Test-41Document8 pages(123doc) - Toefl-Reading-Comprehension-Test-41Steve XNo ratings yet
- University of Chicago Press Fall 2009 CatalogueFrom EverandUniversity of Chicago Press Fall 2009 CatalogueRating: 5 out of 5 stars5/5 (1)
- University of Chicago Press Fall 2009 Distributed TitlesFrom EverandUniversity of Chicago Press Fall 2009 Distributed TitlesRating: 1 out of 5 stars1/5 (1)