You might also like
- Conformidad de ServicioDocument5 pagesConformidad de ServicioMitssi Rios Esteban100% (2)
- 3-Motor Diesel OM 636 Mercedes BenzDocument80 pages3-Motor Diesel OM 636 Mercedes BenzEdgarus V. MartínezNo ratings yet
- Fauna Silvestre de La Comunidad de Madrid.Document60 pagesFauna Silvestre de La Comunidad de Madrid.Aitor0% (1)
- Fundamento Fisiológico de La CreatividadDocument5 pagesFundamento Fisiológico de La CreatividadJesus A RiveroNo ratings yet
- Como Poner Una Tienda de Videojuegos - Guía de NegocioDocument4 pagesComo Poner Una Tienda de Videojuegos - Guía de NegocioAlbertoNo ratings yet
- Analisis ERE GURTELDocument3 pagesAnalisis ERE GURTELdavidtobNo ratings yet
- Caturra Es Una Mutación Natural de La Variedad Borbón, La Cual Tiene Una Mutación de Un Solo Gen Que Causa Que La Planta Crezca Más Pequeño (Enanismo)Document1 pageCaturra Es Una Mutación Natural de La Variedad Borbón, La Cual Tiene Una Mutación de Un Solo Gen Que Causa Que La Planta Crezca Más Pequeño (Enanismo)Mary Carmen CastroNo ratings yet
- Análisis Comparativo Entre Metodologías Ágiles y TradicionalesDocument36 pagesAnálisis Comparativo Entre Metodologías Ágiles y TradicionalesCESAR GOMEZ DURANNo ratings yet
- Album de Las VitaminasDocument19 pagesAlbum de Las VitaminasLynn Danilla de Salvattecci75% (4)
- Motivacion y AutoestimaDocument43 pagesMotivacion y AutoestimaYolyger Delgado100% (1)
- Los Emblemas de AlciatoDocument7 pagesLos Emblemas de AlciatoEduardo AltúzarNo ratings yet
- Oraciones Diarias A Los 33 Dias Dedicados Al Sagrado Corazon de JesusDocument7 pagesOraciones Diarias A Los 33 Dias Dedicados Al Sagrado Corazon de JesusMisae Efren Gonzalez Ramirez67% (3)
- Contrato NuevoDocument5 pagesContrato NuevoBayardo GadeaNo ratings yet
- FES-Flores de CaliforniaDocument13 pagesFES-Flores de Californiaolgaelenacamacho100% (3)
- Demanda - 13 - 4 - 2021 9 - 43 - 40Document7 pagesDemanda - 13 - 4 - 2021 9 - 43 - 40Karen BeltranNo ratings yet
- Carta A Una Señorita en París, Un Cuento NeofantásticoDocument4 pagesCarta A Una Señorita en París, Un Cuento NeofantásticoMariana Cárdenas GutierrezNo ratings yet
- Laboratorio 8. - MaderasDocument9 pagesLaboratorio 8. - Maderas2K20NoCapNo ratings yet
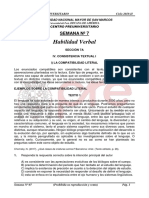
- Solucionario 7 PDFDocument112 pagesSolucionario 7 PDFrios25% (4)
- Mi Libro de Trazos #1 Grado 1°Document16 pagesMi Libro de Trazos #1 Grado 1°Omaira HenaoNo ratings yet
- Catalogo ZitroDocument33 pagesCatalogo ZitroJuan carlosNo ratings yet
- Aprendo-2022-Ficha 4 - Informacion Genetica 1Document7 pagesAprendo-2022-Ficha 4 - Informacion Genetica 1Katherine Villegas CuadrosNo ratings yet
- PR Actica 6. Espacios Con Producto Interno. Algebra Lineal 2011. 2do A No Lic. Matem Atica y ProfesoradoDocument3 pagesPR Actica 6. Espacios Con Producto Interno. Algebra Lineal 2011. 2do A No Lic. Matem Atica y ProfesoradoNelson GonzalesNo ratings yet
- Ley de GaussDocument4 pagesLey de GaussViictor Manuelle MiierNo ratings yet
- El Primer Día de ClasesDocument2 pagesEl Primer Día de ClasesEA NCNo ratings yet
- Presentacion Cap 7Document31 pagesPresentacion Cap 7Jennifer AlexandraNo ratings yet
- Laboratorio Planificación Docente 2021 HBD-CCPDocument6 pagesLaboratorio Planificación Docente 2021 HBD-CCPDimas NavarroNo ratings yet
- Personajes de DQ1Document8 pagesPersonajes de DQ1MedorianaNo ratings yet
- Naturaleza de La LesionDocument10 pagesNaturaleza de La LesionMaria Elena Guarachi MamaniNo ratings yet
- Interconexión (Trafico Gris)Document2 pagesInterconexión (Trafico Gris)Jurgens PerezNo ratings yet
- Tarea 5 Derecho RomanoDocument13 pagesTarea 5 Derecho RomanoPedro Francisco Inoa HernándezNo ratings yet