You might also like
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Wind Effects: Timothy A. Reinhold Ben L. SillDocument6 pagesWind Effects: Timothy A. Reinhold Ben L. SillEngr Shahnawaz GhanchiNo ratings yet
- Test Equipment and Measuring InstrumentsDocument10 pagesTest Equipment and Measuring InstrumentsEngr Shahnawaz GhanchiNo ratings yet
- 1586 C022Document12 pages1586 C022Engr Shahnawaz GhanchiNo ratings yet
- Construction Project ManagementDocument137 pagesConstruction Project ManagementJavier F. Via Giglio92% (13)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- 78 128Document51 pages78 128Anonymous qKeDFDNo ratings yet
- Aldehyde Ketones and Carboxylic AcidDocument1 pageAldehyde Ketones and Carboxylic AcidRaunak JayaswalNo ratings yet
- 2018 CONCRETE AND HIGHWAY MATERIALS LABORATORY LAB MANUAL LATEST (Edited)Document133 pages2018 CONCRETE AND HIGHWAY MATERIALS LABORATORY LAB MANUAL LATEST (Edited)Girish HiremathNo ratings yet
- 513-Part 1-2016Document17 pages513-Part 1-2016Shaheen MaveNo ratings yet
- 250ml Volumetric Analysis Standards and SolutionsDocument6 pages250ml Volumetric Analysis Standards and SolutionsSham SajaNo ratings yet
- 9-10 Origin and Occurrence of Earthquake and Importance of Ground WaterDocument5 pages9-10 Origin and Occurrence of Earthquake and Importance of Ground WaterEzekiel BautistaNo ratings yet
- Lube Oil Replenishment Procedure Air CompDocument3 pagesLube Oil Replenishment Procedure Air CompGulraiz ShaukatNo ratings yet
- Factors Affecting Enzyme-Catalyzed Reactions: November 2012Document32 pagesFactors Affecting Enzyme-Catalyzed Reactions: November 2012trang ngôNo ratings yet
- Cobalt Free CompositeDocument10 pagesCobalt Free CompositeFadil KhayrNo ratings yet
- Sceince Mcqs General FinalDocument32 pagesSceince Mcqs General FinalSyed Atiq TurabiNo ratings yet
- GeographyDocument5 pagesGeographyBinduja Br100% (1)
- DielectricDocument3 pagesDielectricJoshua DuffyNo ratings yet
- MCQ'S Material PhysicsDocument8 pagesMCQ'S Material PhysicsLaiba IqbalNo ratings yet
- Circular MotionDocument6 pagesCircular MotionRasoolKhadibiNo ratings yet
- Science Reviewer - FinaDocument3 pagesScience Reviewer - FinaAmamore Lorenzana PlazaNo ratings yet
- Co (NH3) 6Document1 pageCo (NH3) 6Ayotunde OnasanyaNo ratings yet
- ASTM E 45-2005 (E 2007) (E 2008) Standard Test Methods For Determining The Inclusion Content of SteelDocument19 pagesASTM E 45-2005 (E 2007) (E 2008) Standard Test Methods For Determining The Inclusion Content of SteelTausif LodhiNo ratings yet
- 5991-5412ES Agilent LC Hardware SpanishDocument45 pages5991-5412ES Agilent LC Hardware SpanishDANIEL-LABJMENo ratings yet
- CV Example PHD PostdocDocument2 pagesCV Example PHD PostdocDhileepan Kumarasamy100% (1)
- Chapter - 1 .. Electric Charges and Fields: Coulomb's LawDocument8 pagesChapter - 1 .. Electric Charges and Fields: Coulomb's LawAshok PradhanNo ratings yet
- C6 - PFTR Results CalculationDocument10 pagesC6 - PFTR Results CalculationJxinLeeNo ratings yet
- Water Content of Acacia Honey Determined by Two EsDocument5 pagesWater Content of Acacia Honey Determined by Two EsDestia AyuNo ratings yet
- LT4 C2 L2-Handout-v2Document15 pagesLT4 C2 L2-Handout-v2Xyz ZyxNo ratings yet
- The Prenatal Epoch - A Case Study in Medical AstrologyDocument5 pagesThe Prenatal Epoch - A Case Study in Medical AstrologyANTHONY WRITER100% (1)
- DEGRADATIONPATHWAY B. Pharm 2-2Document22 pagesDEGRADATIONPATHWAY B. Pharm 2-2Yuppie RajNo ratings yet
- 1 in Aluminum Air Op Double Diaphram 85627 85628 85629 404103C 28CDocument23 pages1 in Aluminum Air Op Double Diaphram 85627 85628 85629 404103C 28CJhon CampuzanoNo ratings yet
- Jurnal Online Agroekoteknologi Vol.1, No.3, Juni 2013 ISSN No. 2337-6597Document11 pagesJurnal Online Agroekoteknologi Vol.1, No.3, Juni 2013 ISSN No. 2337-6597Anjar SulistyoNo ratings yet
- CH 2 Coulombs Law APEMDocument3 pagesCH 2 Coulombs Law APEMJames FlaughNo ratings yet
- BS en Iso 17985Document22 pagesBS en Iso 17985Shankar GurusamyNo ratings yet
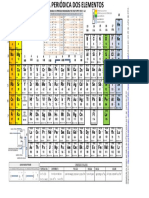
- Tabela Periódica Com Valores de NoxDocument1 pageTabela Periódica Com Valores de NoxSamuel ChiezaNo ratings yet