Professional Documents
Culture Documents
Cap1 - Mecanica Das Estruturas - Algebra Matricial
Uploaded by
Leandro MarcelinoCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Cap1 - Mecanica Das Estruturas - Algebra Matricial
Uploaded by
Leandro MarcelinoCopyright:
Available Formats
Captulo 1
ELEMENTOS DE LGEBRA MATRICIAL
1.1. INTRODUO
1.1.1. Matrizes e Vetores
Uma Matriz pode ser definida como um conjunto ordenado de nmeros. As matrizes mais usuais so formadas por m x n nmeros ordenados em m linhas e n colunas, como representada na expresso (1.1):
a11 a [A] = 21 M am1 a12 a22 am2 M L a1n L a2n O M L amn
(1.1)
Uma matriz m x n dita de ordem m por n. Quando m = 1 resulta uma matriz ou vetor linha, quando n = 1 tem-se uma matriz, vetor coluna ou simplesmente vetor. A representao usual de matrizes feita utilizando-se uma letra maiscula entre chaves [ ] ou mais facilmente utilizando-se a letra maiscula em negrito. Um vetor representado usualmente como uma letra minscula entre colchetes { } ou por meio de um letra minscula em negrito. Assim, so exemplos de matrizes:
0 3. 5 2.0 3. 5 [B] = b = 4.8 3.2 2.4 ; [y] = {y} = y = 0 ; 1 . 8 0 1. 4 1 . 2
(1.2)
Um elemento ou coeficiente genrico na i-sima linha e j-sima coluna de uma matriz designado pelo ndice ij. Assim, na matriz [B] da Eq. (1.2), o coeficiente b23 = 2.4 e b31 =0. A grande vantagem na utilizao de matrizes e vetores reside no fato de ser possvel representar uma quantidade qualquer de nmeros ordenados a partir de um nico smbolo. Assim, equaes envolvendo uma quantidade enorme de valores numricos sistematicamente ordenados podem ser expressas com grande simplicidade. Por exemplo, seja o sistema de equaes algbricas lineares, definido em (1.3):
Elementos de lgebra Matricial
4 x1 2 x1 3 x1 -1 x1
+ 2x 2 + x3 + 2x4 = 4 - 3x 2 + 2x3 - x4 = -3 + x 2 - 4x3 + 5x4 = 2 + 3 x 2 + 2x3 + x4 = -4
(1.3)
Por meio da representao matricial o sistema de equaes (1.3) pode ser escrito simplesmente como: [A] {x} = {y}, (1.4)
sendo [A], a matriz do sistema, {x} o vetor de valores incgnitos e {y} o vetor de termos independentes, valendo:
1 2 4 2 y1 4 x1 2 - 3 2 - 1 x y 3 2 2 [A] = , {x} = , { y} = = , 3 1 4 5 y3 2 x3 2 1 y 4 x4 4 1 3
(1.5)
1.1.2. Notao Indicial
Uma forma de representao matemtica condensada de grandezas matriciais consiste da notao indicial, sendo tambm de grande utilidade para a programao computacional. Nesta representao, uma matriz representada por seu elemento genrico: [A] = aij , {x} = xi (1.6)
Usualmente na mecnica dos slidos os ndices subscritos (i, j = 1, 2 e 3) representam os eixos de um sistema ortogonal de referncia (x, y, z). Na notao indicial, a ocorrncia de um ndice repetido em um mesmo termo representa somatrio, resultando:
ai ai =
aii =
aa
i=1
i i
2 2 = a12 + a2 + a3
(1.7)
(1.8) (1.9)
a
i =1 3 j=1
ii
= a11 + a22 + a33
aijbj = aijbj = ai1b1 + ai2b2 + ai3b3
1.1
Elementos de lgebra Matricial
1.2. OPERAES COM MATRIZES 1.2.1. Igualdade de Matrizes
Duas matrizes [A] e [B] so iguais se e somente se:
[A] e [B] tem a mesma ordem, ou seja, tem o mesmo nmero de linhas e colunas; Todos os elementos nas posies correspondentes so iguais, isto , aij = bij.
1.2.2. Soma e Subtrao de Matrizes
Duas matrizes [A] e [B], sendo [A] de elementos aij e [B] de elementos bij, podem ser somadas ou subtradas, se e somente se, ambas as matrizes possuem a mesma ordem, isto , o mesmo nmero de linhas e colunas. Neste caso, a matriz resultante [C]mxn ter a mesma ordem e seus elementos sero obtidos pela soma ou subtrao dos correspondentes elementos das matrizes [A]mxn e [B]mxn. Assim, para i = 1 at p (i = 1, p) e para j = 1 at q (j = 1, q):
cij = aij + bij , ou cij = aij bij
(1.10)
Como exemplo, seja calcular a soma das matrizes [A] e [B] a seguir definidas:
[A] =
resultando:
3 1 4 ; [B] = 5 3 2
4 3 1 3 4 5 ,
(1.11)
[C ] = [A] + [B] =
3 . 8 7 7
7 2
(1.12)
1.2.3. Multiplicao de Matrizes por Valores Escalares
A multiplicao de uma matriz por um valor escalar resulta numa matriz de mesma ordem, com cada elemento sendo multiplicado pelo valor escalar. Assim, sendo k um valor escalar tem-se:
[C ] = k[A] cij = k.aij .
anterior, resultando:
(1.13)
Como exemplo seja obter o produto [C ] = k[A] , com k = 3 e [A] definida no item
3 12 . 15 3 2 9
[C ] = k[A] =
(1.14)
1.2
Elementos de lgebra Matricial
1.2.4. Multiplicao de Matrizes
Duas matrizes [A] e [B] podem ser multiplicadas para se obter uma terceira matriz [C]=[A].[B] se e somente se, o nmero de colunas de [A] for igual ao nmero de linhas de [B]. Assim, se a matriz [A] tem ordem p x m ([A]pxm) e a matriz [B] tem ordem m x q ([B]mxq), a matriz resultante [C] ter ordem p x q ([A]pxq), com o elemento genrico cij da matriz [C] sendo definido, para i = 1, p e para j = 1, q como: cij = aik .bkj .
k =1 m
(1.15)
Assim, o coeficiente cij obtido pela soma dos produtos dos elementos da linha de ordem i da matriz [A] pelos correspondentes elementos da coluna de ordem j da matriz [B]. Como exemplo, seja calcular o produto de matrizes [C]2x2=[A]2x3.[B]3x2, sendo:
1 3 2 2 3 [A] = ; [B] = 2 1 . 3 5 2 3 2
(1.16)
Os coeficientes da matriz [C] so obtidos pela expresso (1.15), resultando: c11 = (2).(1) + (2).(2) + (3).(3) = 15; c12 c21 c22 = (2).(3) + (2).( 1) + (3).( 2) = 2; [C] = = (3).(1) + (5).(2) + ( 2).(3) = 7; = (3).(3) + (5).(1) + ( 2).(2) = 8
15 2 7 8
(1.17)
Observaes: i) No caso geral, a soma ou subtrao de matrizes, de ordem m x n, exige m.n operaes aritmticas de soma ou subtrao. A multiplicao por escalar exige m.n operaes de multiplicao. A multiplicao de matrizes, por exemplo, [A]pxm[B]mxq, exigem p.q.m operaes de multiplicao e p.q.(m-1) operaes de soma. ii) A operao de multiplicao de matrizes no comutativa, isto , no caso mais geral [A][B][B][A]. Por exemplo, considerando as matrizes [A] e [B] anteriores, tem-se: [C]2x2 = [A]2x3 . [B]3x2 e [D]3x3 = [B]3x2 . [A]2x3, sendo:
1.3
Elementos de lgebra Matricial
d11 = (1).(2) + (3).(3) = 11; d12 d13 d21 d22 d23 d31 d32 d33
= (1).(2) + (3).(5) = 17 ; = (1).(3) + (3).( 2) = 3; = (2).(2) + ( 1).(3) = 1; 11 17 3 = (2).(2) + ( 1).(5) = 1; [D] = 1 1 8 = (2).(3) + ( 1).( 2) = 8; 0 4 13 = (3).(2) + ( 2).(3) = 0; = (3).(2) + ( 2).(5) = 4; = (3).(3) + ( 2).( 2) = 13;
(1.18)
iii) Para distinguir a ordem de multiplicao das matrizes, diz-se que no produto [A][B], a matriz [A] pr-multiplica a matriz [B] ou, de forma equivalente, a matriz [B] ps-multiplica a matriz [A]. iv) Apesar de no comutativa, a operao de multiplicao de matrizes distributiva e associativa. A lei distributiva estabelece que: [E]=([A]+[B])[C] = [A][C] + [B][C] Por sua vez, a lei associativa define que: [F] = ([A][B])[C]=[A]([B][C])=[A][B][C], (1.20) (1.19)
estabelecendo que a ordem de multiplicao de matrizes indiferente em termos de resultados finais, embora os nmeros de operaes aritmticas possam ser muito diferentes. Assim, o produto ([A]3x2.[B]2x3)[C]3x1, necessita de 27 operaes de multiplicao, enquanto que o produto [A]3x2.([B]2x3)[C]3x1, exige apenas 12 operaes de multiplicao.
1.3. MATRIZES PARTICULARES 1.3.1. Matriz Transposta
A matriz transposta ou transposta de uma matriz [A], de ordem m x n, uma matriz de ordem n x m, sendo designada de [A]T , sendo obtida da matriz [A] pela troca das linhas pelas colunas
2 3 2 2 3 T [A] = [A] = 2 5 3 5 2 3 2
(1.21)
1.4
Elementos de lgebra Matricial
1.3.2. Matriz Quadrada
Uma matriz [A], de ordem n x n dita uma matriz quadrada de ordem n. A matriz [A] definida em (1.5) uma matriz quadrada de ordem 4. Os coeficientes aii, com i = 1 at n, definem a diagonal principal de uma matriz quadrada.
1.3.3 - Matriz Simtrica
Uma matriz [A] quadrada de ordem n com aij = aji dita uma matriz simtrica. Assim, toda matriz simtrica , obrigatoriamente, uma matriz quadrada. Neste caso, tem-se: [A]= [A]T. (1.22)
1.3.4. Matriz Diagonal
Uma matriz quadrada dita diagonal quando aij = 0, para ij.
1.3.5. Matriz Identidade ou Unitria
Uma matriz dita identidade quando alm de quadrada e diagonal, aii = 1. Por exemplo a matriz [I]3 uma matriz identidade de ordem 3:
1 0 0 = 0 1 0 ; 0 0 1
[I]3
(1.23)
1.3.6. Matriz Triangular
Uma matriz quadrada dita triangular quando todos os elementos situados acima ou abaixo da diagonal principal so nulos. Se a ij = 0, para j > i tem-se uma matriz triangular inferior e se a ij = 0, para j < i , tem-se uma matriz triangular superior.
1.5
Elementos de lgebra Matricial
1.3.7. Matriz Banda
Uma matriz dita em banda quando os elementos no nulos so agrupados em torno da diagonal principal. Neste caso, tem-se aij = 0, para i j > m ,sendo lb = 2m + 1 a largura da banda da matriz, conforme a seguir representado para o caso de matriz simtrica:
a11 [A] = 0 a22 a23 a33 a13 0 0 a 44 a34 0 0 a 45 a55 a35 0 0 0 0 a66 a56 .
(1.24)
SIM.
. .
Na Anlise Estrutural so obtidos sistemas de equaes cujas matrizes so quadradas e, predominantemente, simtricas. Alm disso, dependendo da ordenao dos valores incgnitos, as matrizes possuem muitos valores nulos e nos procedimentos utilizados para a soluo do sistema de equaes, grande parte destes valores (certamente os situados acima do primeiro elemento no nulo de cada coluna) permanece nulo. Assim, foram desenvolvidos vrios procedimentos que visam uma otimizao do processo de soluo do sistema de equaes, tanto em relao memria requerida para armazenamento dos coeficientes da matriz do sistema, quanto em relao ao nmero de operaes necessrias ao processo.
1.3.8. Matriz Inversa
A inversa de uma matriz [A] designada de [A]-1. Quando esta matriz existe, os elementos desta matriz so tal que: [A] [A]-1 = [A]-1[A] = [I]. Assim, uma matriz para admitir uma inversa obrigatoriamente uma matriz quadrada. Quando uma matriz quadrada admite uma inversa, ela dita no singular. Caso contrrio, tem-se uma matriz singular.
1.6
Elementos de lgebra Matricial
A obteno da matriz inversa da matriz de um sistema de equaes permite a soluo do sistema. Se o sistema admite uma soluo, existe a matriz inversa [A]-1 e pr-multiplicando ambos os termos da equao por [A]-1, obtm-se:
[A][A]1 {x} = [A]1 {y} {x} = [A]1 {y}.
(1.25)
Embora possa ser usado, o custo computacional da inverso de uma matriz torna este procedimento muito desvantajoso quando comparado a outras tcnicas de soluo de sistema de equaes. Assim, em geral utiliza-se o mtodo de triangularizao (ou de eliminao) de Gauss, que possui diferentes variantes em funo das tcnicas de montagem e armazenamento dos coeficientes da matriz. Em certos casos pode ser vantajoso o emprego de mtodos iterativos para a soluo do sistema de equaes.
1.3.9. Matriz Ortogonal
Uma matriz [A] dita ortogonal quando: [A]-1 =[A]T. Neste caso, necessariamente, a matriz [A] quadrada e simtrica.
1.3.10. Partio de Matrizes
Visando facilitar as operaes com matrizes, em especial para tirar vantagens de caractersticas particulares apresentadas por certas matrizes, bastante comum a partio da matriz em submatrizes de ordens menores, como no exemplo a seguir: a11 a 21 = a31 a41 a12 a22 a32 a42 a13 a23 a33 a 43 a14 a24 a34 a44 a15 a25 [A11 ]3x2 = a35 [A21 ]1x2 a 45
[A]4 x5
[A12 ]3x1 [A13 ]3x2 [A22 ]1x1 [A23 ]1x2
(1.26)
sendo:
a11 = a21 a31 a12 a14 a13 a22 ; [A12 ]3x1 = a23 ; [A13 ]3x2 = a24 a32 a34 a33 a15 a25 ; a35
[A11 ]3x2
[A21 ]1x2 = [a41
a42 ]; [A22 ]1x1 = [a43 ]; [A23 ]1x2 = [a44
1.7
a45 ];
(1.27)
Elementos de lgebra Matricial
1.4. ESPAOS VETORIAIS REAIS. SUBESPAOS. DEPENDNCIA E INDEPENDNCIA LINEAR. BASES. 1.4.1. Espaos Vetoriais Reais
Um espao vetorial real V um conjunto de elementos denominados vetores, que aceitam duas operaes bsicas: adio e multiplicao por um escalar. Para dois vetores quaisquer x e y em V existe um nico vetor x + y chamado de soma de x e y. Para x, y e z V, a operao de soma ou adio de vetores satisfaz as seguintes relaes:
i) comutativa : x + (y + z) = (x + y) + z; ii) associativa: x + y = y + x; iii) Existe um nico vetor 0 (zero) em V, tal que: x + 0 = x; iv) Para cada x existe um nico vetor -x tal que: x + (-x) = 0;
(1.28) (1.29) (1.30) (1.31)
Para um vetor x qualquer em V, dado um nmero , existe um nico vetor x em V chamado o produto escalar de e x. Para x e y V, a operao de multiplicao escalar ou produto escalar atende as seguintes propriedades:
i) (x + y) = x + y; ii) (+) x = x +x; iii) () x = (x); iv) 1x = x;
(1.32) (1.33) (1.34) (1.35)
Os espaos R, R2 e R3, estudados na geometria analtica so exemplos de espaos vetoriais reais. O conjunto P de todos os polinmios em x com coeficientes reais, com a definio usual de soma e multiplicao por nmeros reais, forma um espao vetorial real.
1.8
Elementos de lgebra Matricial
1.4.2. Subespaos Vetoriais
Um conjunto (no vazio) W de um espao vetorial V um subespao de V se todo vetor da forma x + y pertencer a W, sempre que x e y pertenam a W, sendo e valores escalares arbitrrios. Todo espao vetorial tem pelo menos dois subespaos vetoriais: o espao todo e o subespao contendo apenas o vetor nulo (subespao trivial). Um subespao distinto do prprio espao chamado de subespao prprio. O espao R2 um subespao de R3. De fato, todas as retas e todos os planos que contm a origem so subespao de R3. Sendo C1[a,b] o conjunto de todas as funes que possuem uma derivada contnua em cada ponto do intervalo [a,b] (funes continuamente diferenciveis em [a,b]) e Cn[a,b] o conjunto de funes n (inteiro positivo) vezes continuamente diferenciveis em [a, b], ento:
i) C1[a,b] e Cn[a,b] so espaos vetoriais; ii) Cm[a,b] um subespao de Cn[a,b] sempre que m<n.
Define-se o espao vetorial Pn, como o conjunto de todos os polinmios com coeficientes reais de grau < n, na forma a0 + a1 x + a2 x 2 + . . . + an 1 x n 1 , sendo espao vetorial Pn, assim como o polinmio trivial um subespao de P, que forma o espao anteriormente definido de todos os polinmios em x com coeficientes reis. Se W1 e W2 so subespao de V, ento o conjunto formado de todos os vetores que pertencem a ambos um subespao de V, chamado de interseo de W1 e W2.
a0 , a1 , a2 ,. . ., an nmeros reais arbitrrios e n um inteiro positivo fixo. Assim, o
1.4.3. Combinao Linear
Uma expresso da forma:
1 x1 + 2 x2 + . . . + n xn ,
sendo 1 , 2 ,..., n nmeros reais, chama-se uma combinao linear dos vetores
x1 , x2 ,..., xn .
Se S um subconjunto no vazio de um espao vetorial V, ento o subespao de V gerado por S consiste de todas as combinaes lineares de vetores em S. 1.9
Elementos de lgebra Matricial
1.4.4. Dependncia e Independncia Linear. Bases
Diz-se que o vetor x linearmente dependente de x1 , x2 ,..., xn se x pode ser escrito na forma: 1 x1 + 2 x2 + . . . + n xn , sendo os coeficientes i valores escalares. Caso contrrio, x linearmente independente de x1 , x2 ,..., xn . Assim, x linearmente dependente de x1 , x2 ,..., xn se e somente se x uma combinao linear de x1 , x2 ,..., xn . Um conjunto de vetores x1 , x2 ,..., xn linearmente independente se e somente se a equao 1 x1 + 2 x2 + . . . + n xn = 0 , implica que 1 = 2 = . . . = n = 0 . Todo conjunto finito de vetores x contm um subconjunto linearmente independente que gera o subespao Y(x) que contm todos os vetores de X. Um subconjunto finito B linearmente independente de um espao vetorial V forma uma base de V, se o subespao gerado Y(B) = V. Como exemplo clssico de uma base tem-se o conjunto dos vetores i = (1,0,0), j = (0,1,0), k = (0,0,1), que formam uma base de R3. Alm disso, todo e qualquer vetor x = (x1 , x2 , x3 ) de R3 pode ser escrito de uma e somente uma forma como uma combinao linear desta base, ou seja, x = x1 i + x2 j + x3 k . Assim, um conjunto de vetores e1 , e2 ,..., en uma base de um espao vetorial V se e somente se todo vetor de V pode ser escrito de modo nico como combinao linear de e1 , e2 ,..., en . Como exemplo de conjunto de vetores que formam uma base para o espao vetorial que os contm, tem-se: i) e1 = (1,0,0,...,0), e2 = (0,1,0,...,0),..., en = (0,0,0,...,1) formam uma base de Rn; ii) Os polinmios 1, x, x 2 ,. . ., xn 1 formam uma base para o espao vetorial Pn;
Diz-se que espao vetorial V tem dimenso n (dim V = n) se tem uma base consistindo de n vetores. Caso contrrio, diz-se que o espao vetorial tem dimenso infinita. Assim, Rn e Pn tem dimenso n e P tem dimenso infinita.
1.10
Elementos de lgebra Matricial
1.4.5. Bases como um Sistema de Coordenadas
Se o conjunto de vetores e1 , e2 ,..., en forma uma base de V ento existe uma nica forma de expressar um vetor x de V em termos dos vetores da base utilizada, isto : x = 1 e1 + 2 e2 + . . . + n en . Neste caso, pode-se dizer que os vetores e1 , e2 ,..., en formam um sistema de coordenadas (ou de referncia) de V, e que os escalares 1 , 2 , . . ., n so os valores das coordenadas neste sistema, que definem o vetor x. Alm disso, os subespaos de V gerados por cada um dos vetores da base ei so chamados de eixos de coordenadas do sistema. Se e1 , e2 ,..., en forma uma base qualquer do espao vetorial V, ento a soma de dois vetores de V obtida somando as componentes correspondentes e o produto de um vetor por um escalar calculado multiplicando cada componente do vetor por .
x = 1 e1 + 2 e2 + . . . + n en
y = 1 e1 + 2 e2 + . . . + n en ,
(1.36)
ento: x + y = ( 1 + 1 ) e1 + ( 2 + 2 ) e2 + . . . + ( n + n ) en . Analogamente: x = ( 1 e1 + 2 e2 + . . . + n en ) = 1 e1 + 2 e2 + . . . + n en (1.38) (1.37)
Assim, se o conjunto de vetores e1 , e2 ,..., en forma uma base de V, existe uma nica forma de expressar qualquer vetor x de V, em particular se:
x = 1 e1 + 2 e2 + . . . + n en = 0 ,
(1.39)
Como ao se fazer:
1 = 2 = . . . = n = 0 ,
(1.40)
uma forma de atender a equao (1.39). Como ela nica, prova-se que os vetores e1 , e2 ,..., en que formam a base de V so linearmente independentes.
1.11
Elementos de lgebra Matricial
1.4.6. Dimenso de um Espao Vetorial
A dimenso n de um espao vetorial definida pelo nmero de vetores que formam uma base deste espao. Neste caso, n+1 vetores quaisquer so linearmente dependentes e, alm disso, toda e qualquer base deste espao contm n vetores.
1.4.7. Mudana de Base
Sejam Bu = {u1 , u2 ,..., un } e Bv = { v1 , v2 ,..., vn } duas bases ordenadas de um mesmo espao vetorial V. Dado um vetor x V possvel escrev-lo como:
x = 1 u1 + 2 u2 + . . . + n un
(1.41a)
e:
x = 1 v1 + 2 v2 + . . . + n vn
(1.41b)
Escrevendo a expresso (1.41a) na forma matricial ,tem-se:
1 1 2 2 L un ] , com [x]Bu = M M n n
x = [u1
u2
(1.42)
sendo os valores de 1, 2 , . . ., n as coordenadas do vetor x na base Bu: De modo semelhante, utilizando-se a base Bv obtm-se:
1 1 2 2 x = [v1 v2 L vn ] ; [x]Bv = , M M n n sendo os valores de 1 , 2 , . . ., n as coordenadas do vetor x na base Bv:
(1.43)
Como Bu = {u1 , u2 ,..., un } base de V, podemos escrever os vetores vi da base Bv = { v1 , v2 ,..., vn } , como combinao linear dos vetores da base Bu na forma:
1.12
Elementos de lgebra Matricial
v2 = a12 u1 + a22 u2 + L + an2 un . M vn = a1n u1 + a1n u2 + L + ann un Substituindo a expresso (1.44) em (1.41b), obtm-se:
x = 1 (a11 u1 + a21 u2 + L + an1 un ) + 2 (a12 u1 + a22 u2 + L + an2 un ) + n (a1n u1 + a2n u2 + L + ann un ) M
v1 = a11 u1 + a21 u2 + L + an1 un
(1.44)
(1.45)
Igualando-se expresso (1.41a), resulta: 1 = a11 .1 + a12 . 2 + L + a1n .n 2 = a21 .1 + a22 . 2 + L + a2n .n M n = an1 .1 + an2 . 2 + L + ann .n A expresso (1.46) pode ser escrita na forma matricial como: 1 a11 a 2 = 21 M M n an1 Fazendo-se: a12 a22 M an2 L a1n 1 L a2n 2 . O M M L ann n
(1.46)
(1.47)
[I]B B
v u
a11 a 21 = M an1
a12 a22 M an2
L a1n L a2n , O M L ann
(1.48)
tem-se:
[x]B = [I]B B [x ]B ,
v v u u
(1.49)
Sendo
[I]B B
v u
a matriz de mudana de base de Bv para a base Bu.
1.13
Elementos de lgebra Matricial
Alm disso, os vetores da base Bv e da base Bu so tais que:
([I] )
Bv Bu
= [I]Bv [I]Bv
Bu Bu Bv
( )
= [I]Bu e [I]Bv [I]Bu = [I]
Bv Bu Bv
(1.50)
Bv em relao nova base, Bu, ou seja, a matriz [I]Bu constituda por colunas que
Bv
Assim, para se obter [I]Bu necessrio determinar as coordenadas da base antiga definem as coordenadas dos vetores da base antiga Bv em relao aos vetores da nova base Bu.
Por Exemplo, sejam B = {(1,0), (0,1)}e B = {(2,1), (3,4 )}bases do espao R2. Obter as
matrizes de mudana de base [I]B e [I]B B .
B
Como a base B a base cannica, fcil obter-se a matriz [I]B , bastando escrever
B
nova base B = {(1,0), (0,1)}:
diretamente os vetores da base antiga B = {(2,1), (3,4 )}em termos dos vetores da
[I]B B
2 3 = . 1 4
(1.51) tem-se que determinar as coordenadas da base antiga
Para obter-se
B = {(1,0), (0,1)}em relao a nova base, B = {(2,1), (3,4 )}:
[I]B B ,
a11 = 1/11; a21 = 4/11; (1,0 ) = a11 (2,-1) + a21 (3,4 ) 1 4 - 3 B [I]B = 11 1 2 (0,1) = a12 (2,-1) + a22 (3,4 ) a12 = -3/11; a22 = 2/11.
(1.52)
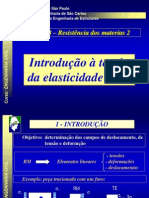
Seja agora, a determinao da matriz de rotao da base padro (eixos cartesianos , e2 } , inclinadas de um x, y) de R2, B = {e1 , e2 } numa base nas direes x, y e B = {e1 ngulo em relao a x,y e vice versa. e [I]B B = [R ]e =
e
cos - sen . sen cos
(1.53)
Como [R ]e ortogonal:
e e [I]B B = [R ]e = ([R ]e ) T
cos sen = - sen cos
(1.54)
1.14
Elementos de lgebra Matricial
Y'
Y X' cos e' 1 sen X
Y'
Y X' sen e 2 cos -sen e1 cos X
e' 2
-sen
cos q
Figura 1 - Rotao de eixos
e e1 tem-se : Assim, por exemplo, para os vetores e1
e {x}B = [I]B e1 }B = [R ]e {e1 }B = B {x}B { 0 sen
cos - sen cos cos - sen cos
sen cos
}B = [R ]e }B = {x}B = [I]B e1 e1 B {x}B { e { 0 - sen cos sen
(1.55)
1.5. TRANSFORMAES LINEARES 1.5.1. Definio
Uma transformao linear ou um operador linear, de um espao vetorial V1 num espao vetorial V2 , A:V1 V2, uma funo A que associa a cada vetor x de V1 um nico vetor y de V2, de modo que: A(x1 + x2 ) = A(x1 ) + A(x2 ) e:
A((x)) = A(x)
(1.56)
para todos os vetores x1 , x2 e x V1 e todos os escalares . Estas exigncias so usualmente definidas dizendo-se que uma transformao linear atende as operaes algbricas de adio e multiplicao por escalar. Como consequncia destas exigncias, uma transformao linear sempre leva o vetor zero de V1 no vetor zero de V2. O espao vetorial V1 chamado de domnio de A e o conjunto de todos os vetores y do espao V2, tais que y = A(x) para algum x, chamado de imagem de A, sendo representado por I(A), no necessariamente igual ao espao V2 inteiro. 1.15
Elementos de lgebra Matricial
1.5.2. Soma de Transformaes Lineares
Se A e B so transformaes lineares de V1 em V2, ento sua soma, A + B, tambm uma transformao linear de V1 em V2 definida para todo x de V1 como: (A+B) (x)= A(x) + B(x) (1.57)
1.5.3. Produto de Transformaes Lineares
Sejam as transformaes lineares A e B definidas nos espaos vetoriais V1 , V2 e V3 como: A:V1 V2 e B:V2 V3. Neste caso possvel definir uma transformao linear combinada (ou multiplicada) de V1 em V3, representada como BA, e designada o produto de A e B (nessa ordem), como:
BA(x)= B(A (x)),
e:
BA(1 x1 + 2 x2 ) = B[A(1 x1 + 2 x2 )] = B[1A(x1 ) + 2A(x2 )] = 1B(A(x1 )) + 2B(A(x2 )) = 1BA(x1 ) + 2BA(x2 ) (1.58)
Nota-se facilmente que o produto BA est definido somente quando a imagem de A est contida no domnio de B, de modo que um dos produtos BA ou AB, pode existir sem que o outro exista. Mas, mesmo no caso de ambas as transformaes A e B, aplicam um dado espao em si mesmo, no necessariamente BA = AB. Este fato define que a multiplicao de transformaes lineares no-comutativa. Por outro lado a multiplicao de transformaes lineares associativa e distributiva. Desta forma sendo A, B e C, transformaes lineares, I a transformao identidade e um escalar, tem-se:
A(BC) = (AB)C
(1.59a) (b) (c) (d)
(A1 + A2 )B = A1B + A2B, e : A(B1 + B2 ) = AB1 + AB2 ;
(A) = A(( = (AB)
AI = IA = A
1.16
Elementos de lgebra Matricial
1.5.4. Ncleo e Imagem de uma Transformao. Inversa
Seja uma transformao linear A: V1 V2. Chamando o ncleo de A, N(A), o conjunto de todos os vetores y de V2, tais que A(x)=0, ento o N(A) contm o vetor zero e, se A(x1)=0 e A(x2)=0, ento:
A( 1 x1 + 2 x2 ) = 1 A(x1 ) + 2 A(x2 ) = 0 .
(1.60)
Assim, o ncleo A (N(A)) um subespao de V1, sendo de fundamental importncia para o estudo do comportamento de A em V1. De igual importncia a imagem de A, I(A), que forma um subespao de V2 definido pelo conjunto de todos os y de V2, tais que y=A(x), para algum x de V1, pois se: y1 = A(x1 ) e y2 = A(x2 ) pertencem a I(A), ento:
A( 1 x1 + 2 x2 ) = 1 A(x1 ) + 2 A(x2 ) = 1 y1 + 2 y2 ,
(1.61)
ento:
1 y1 + 2 y2 tambm pertence imagem de 1.
Uma transformao linear A: V1 V2 dita sobre se e somente se a imagem de A igual ao espao V2: I(A)=V2. Diz-se que uma transformao linear A: V1 V2 dita biunvoca se e somente se A(x1 ) = A(x2 ) implica que x1 = x2 . Assim, a transformao linear A: V1 V2 biunvoca se e somente se N(A) = 0. Transformaes lineares biunvocas so ditas isomorfismos e podem ser invertidas. Alm disso, apresentam uma importncia particular uma vez que muitas das funes usuais so biunvocas e apresentam transformao inversa. Assim, diz-se que se uma transformao A: V1 V2 biunvoca, isto , ela um-aum e sobre, quando para a cada vetor y de V2 est associado um nico vetor x de V1. A pode ser usada para definir uma funo de V2 em V1, chamada de inversa de A (A-1) tal que: A 1 ( y) = x , onde A(x) = y . A transformao linear B = A-1: V2 V1, tambm em B e: AA 1 (y) = y AA 1 = IV2 e A 1A(x) = x A 1A = IV1 . (1.62)
Por outro lado, quando uma transformao linear no admite inversa ela dita singular.
1.17
Elementos de lgebra Matricial
1.5.5. Exemplos de Transformaes Lineares
A transformao linear A: R2 R2 , dada por A(x) = (x1, -x2), define uma transformao de R2 sobre si mesmo por reflexo segundo o eixo x1. Os operadores diferenciais definem transformaes lineares.
1.6. REPRESENTAO MATRICIAL DE UMA TRANSFORMAO LINEAR. MUDANA DE BASE. TENSORES. 1.6.1 - Representao Matricial de uma Transformao Linear.
Na anlise de problemas da Engenharia necessita-se relacionar determinados valores com outros valores, como por exemplo: tenso com deformao e deformao com deslocamentos. Cada uma destas relaes pode ser entendida como um processo de transformao entre diferentes valores, as quais podem ser definidas de uma forma precisa e concisa atravs do uso de matrizes. Assim, para a transformao linear A: V1 V2 definida pelo operador A = z 2 p + 3p , sendo V1 o conjunto dos polinmios de grau 3 em z, tal que y=A(x), calcular A(x), para x = 3z+4z3. Aplicando o operador A ao elemento x definido, tem-se:
x = dx d2 x d3 x = 3 + 12.z 2 ; x = = 24.z e: x = = 24 ; dz dz 2 dz 3
(1.63a)
e: y = A(x) = 9 + 36.z 2 + 24.z 3 . (1.63b)
Pode-se verificar facilmente que esta transformao linear singular, uma vez que se x1 = z e x2 = z + , sendo um nmero qualquer, A(x1 ) = A(x2 ) = 3 . Embora a determinao de y = A(x) possa ser obtido de uma forma explicita utilizando-se o diretamente o operador A, o emprego de uma matriz para definir a mesma transformao permite que esta determinao possa ser efetuada computacionalmente de um modo sistemtico e extremamente eficiente. O primeiro passo para obter a matriz representativa desta transformao consiste em se definir duas bases de vetores, uma para representar os elementos x de V1 e
1.18
Elementos de lgebra Matricial
outra, para representar os elementos y de V2. Escolhendo Bu ={ u 1 , u 2 ,..., u n } como a base de x e Bv ={ v1 , v2 ,..., vn } como base de y, pode-se escrever qualquer x V1 e y
V2 como:
x = 1 u1 + 2 u2 + . . . + n un ; y = 1 v1 + 2 v2 + . . . + n vn ;
(1.64)
A representao matricial da transformao linear representada por:
y = A x ou {y} = [A]{x} ,
(1.65)
sendo:
1 {x} = {x}Bu = [x]Bu = 2 , as componentes do vetor x na base Bu; M n 1 {y} = {y}Bv = [y]Bv = 2 , as componentes do vetor y na base Bv; M n
(1.66)
(1.67)
[A] = [A]x y,
matriz onde cada coeficiente aij definido pela coordenada yi
obtida quando o operador A aplicada a cada vetor uj da base Bu . Portanto, para obter os elementos da j-sima coluna de A, basta fazer x = uj, calcular y = A uj e representar y em termos da base de vetores Bv. Como exemplo de aplicao, seja calcular a representao transformao linear A = z 2 p+ 3 p , utilizando duas distintas bases: B u1 = B v1 {u1 = 1, u2 = z, u3 = z 2 , u4 = z 3 } , e: B u2 = B v2 = {u1 = 1, u2 = 1 - z, u3 = z + 3z 2 , u4 = z 3 } . matricial da
(1.68) (1.69)
Considerando a base 1, para avaliar os elementos da j-sima coluna, basta calcular A uj na base Bv1, resultando:
A(u1 ) = 0; A(u2 ) = 3 = 3v1 ; A(u3 ) = 6z + 2z 2 = 3v2 + 2v3 ; A(u4 ) = 9z 2 + 6z 3 = 9v3 + 6v 4 ;
(1.70)
1.19
Elementos de lgebra Matricial
e a matriz A fica definida por:
1 1 A = [A]u = [A]u v u 1
0 0 = 0 0
3 0 0 0 3 0 . 0 2 9 0 0 6
(1.71)
Assim, para transformar o elemento x = 3z+4z3, basta determinar as coordenadas do vetor x em relao base selecionada e fazer a operao matricial y = A x :
0 0 0 3 [y ]Bv1 = = 0 0 0 4 3 0 0 0 9 0 3 0 3 0 = , 0 2 9 0 36 0 0 6 4 24
[x]B
u1
(1.72)
resultando em forma expandida o mesmo resultado obtido anteriormente: y = A(x) = 9 + 36z 2 + 24z 3 (1.73)
Usando o mesmo procedimento obtm-se facilmente a representao na base B v2 = B u2 :
0 3 19 3 0 0 16 3 , 0 0 2 3 0 6 0 0
2 A = [A]u v
(1.74)
e:
[x]B
u2
3 0 3 19 3 3 3 3 0 0 16 3 3 12 = , = [y ]Bv1 = 0 0 0 2 3 0 12 0 6 4 24 4 0 0
(1.75)
que em forma expandida fica: y = A(x) = (-3)(1) + (12)(1 - z) + (12)(z + 3.z 2 ) + (24)(z 3 ) = 9 + 36z 2 + 24z 3 , (1.76) reproduzindo assim o mesmo resultado.
1.20
Elementos de lgebra Matricial
Considerando-se agora, que uma transformao possa ser representada por uma matriz A em uma dada base e que se deseja obter uma matriz A , que represente a mesma transformao em outra base. Neste sentido, uma forma de obter os coeficientes da matriz A consiste em se avaliar a transformao nesta nova base como no exemplo anterior. Entretanto, possvel calcular a matriz A diretamente de A, simplesmente fazendo-se uma mudana na base de referncia da transformao. Assim, numa transformao definida por sua representao matricial:
y = Ax ou {y} = [A]{x} ,
(1.77)
ser particularmente eficiente se a matriz [A] for uma matriz diagonal. Felizmente, na utilizao de mtodos numricos aplicados em problemas da Engenharia, quase sempre existe uma base na qual a transformao fica representada por uma matriz diagonal. Entretanto, infelizmente por sua vez, na grande maior parte das aplicaes prticas, esta base no conhecida de incio. Assim, o procedimento geral consiste em simplesmente se representar inicialmente a transformao numa adequada base (vetores L.I.) de representao e, para tornar mais eficiente o processamento da soluo, transformar em sequncia a matriz obtida em uma matriz diagonal. Esta ltima transformao, por sua vez, pode ser feita computacionalmente de um modo sistematizado.
1.6.2. Mudana de Base de Uma Transformao Linear
Seja A a matriz quadrada de ordem n representativa de uma transformao linear A: V1 V2, definida por:
y = Ax ,
(1.78)
utilizando-se uma nica base Bu ={ u1 , u2 ,..., un } = B v ={ v1 , v2 ,..., vn } como a base de x e como base de y. Para se obter a mesma transformao representada em outra base ou seja: A : V1 V2 , definida por y = A x , utilizando-se uma nica nova base B u = {u1 , u2 ,..., un } = B v = { v1 , v2 ,..., vn } para
x
y , necessrio de incio
1.21
Elementos de lgebra Matricial
representar todos os vetores da base antiga ui , i = 1,..., n , em termos dos vetores da nova base ui , i = 1,..., n , de forma anloga utilizada em (1.49) ou seja: ui =
p
k =1
ik k
u , i = 1..n,
ou: [u]Bu = [P]Bu [x]Bu
Bu
(1.79)
Utilizando-se estas relaes pode-se escrever:
x = Px e y = Py ,
(1.80)
sendo P uma matriz quadrada de ordem n, correspondente a mudana de base. Substituindo-se a expresso anterior na definio do operador resulta:
Py = APx .
(1.81)
Imaginando que existe uma matriz inversa P 1 , isto , que a base escolhida possui n vetores linearmente independentes, tem-se que: P 1P = PP 1 = I , Pr-multiplicando ambos os termos da equao (1.81) por P 1 obtm-se:
P 1Py = P 1APx ,
(1.82)
(1.83)
resultando:
A = P 1AP .
(1.84)
Um procedimento alternativo e equivalente para se obter a matriz A consiste em s e usar as expresses:
x = Px e y = Qy ,
(1.85)
u i , i = 1,..., n ,
sendo Q obtida das relaes que expressam os vetores da nova base
em termos dos vetores da base antiga u i , i = 1,..., n , com os elementos definidos por: ui =
q
k =1
ik k
u , i = 1..n, 1.22
(1.86)
Elementos de lgebra Matricial
Substituindo-se (1.85) na expresso (1.78), resulta:
y=Ax y = APx y = Qy = QAPx .
(1.87) (1.88)
e:
A = QAP .
Devido a unicidade do operador A tem-se:
Q = P 1 ,
(1.89) (1.90)
e:
A = QAQ 1 .
Exemplo:
Seja o exemplo anterior, no qual usando uma primeira base, definida por: B u = {u1 = 1, u2 = z, u3 = z 2 , u4 = z 3 } , obteve-se o operador matricial A. Determinar a matriz representativa do operador utilizando agora uma nova base, definida por B u = {u1 = 1, u2 = 1 - z, u3 = z + 3z 2 , u4 = z 3 } , sendo:
0 0 = 0 0 3 0 0 0 3 0 0 2 9 0 0 6
A = [A]u u
(1.91)
Assim, os vetores da base antiga podem ser escritos em funo dos vetores da nova base como:
1 1 1 u1 = u1 ; u2 = u1 - u2 ; u3 = - u1 + u2 + u3 ; u4 = u4 ; 3 3 3 e obtm-se a expresso (1.80) em forma matricial, como:
1 1 13 0 1 1 3 u P = [I]u = 1 0 0 3 0 0 0 De modo anlogo, tem-se: 0 0 . 0 1
(1.92)
(1.93)
1.23
Elementos de lgebra Matricial
u1 = u1 ; u2 = u1 - u2 ; u3 = u2 + 3 u3 ; u4 = u4 ;
(1.94)
e:
Q = [I]u
u
1 1 0 1 = 0 0 0 0
0 0 1 0 . 3 0 0 1
(1.95)
De (1.88) obtm-se a matriz procurada:
0 3 19 3 0 0 16 3 . 0 0 2 3 0 6 0 0
A = [A]u u
(1.96)
1.6.3. Tensores
Na anlise de problemas de engenharia, os conceitos de tensores e suas representaes matriciais podem ser de grande importncia, em particular os tensores cartesianos, definidos como aqueles cujas componentes podem ser representados em um sistema cartesiano. Assim, considerando-se as coordenadas de um ponto genrico P no espao tridimensional, definido por suas coordenadas em relao a um sistema de referncias cartesianos xi , ( i = 1,2,3) e, em relao a outro sistema cartesiano xi, ( i = 1,2,3) , utilizando-se, respectivamente, bases vetoriais definidas por ei , (i = 1,2,3) e ei, (i = 1,2,3) . Sejam os cosenos diretores entre os ngulos formados entre o primeiro sistema e o segundo denominados de pij = cos(ei, e j ) , na forma: xi =
p x
j=1 ij
(1.97)
Em forma matricial:
x = Px .
Como P uma matriz ortogonal:
(1.98)
x = P T x .
(1.99)
1.24
Elementos de lgebra Matricial
Uma grandeza chamada de escalar se ela tem apenas uma componente no sistema de coordenadas x i e, alm disso, esta componente no varia quando ocorre uma mudana no sistema de coordenada: (xi ) = (xi) , i = 1,2,3 . (1.100)
Um escalar tambm chamado de um tensor de ordem zero. Como exemplo de uma grandeza escalar tem-se a temperatura em um ponto. Uma grandeza chamada de vetor ou tensor de primeira ordem se suas componentes em relao a um sistema xi, ( i = 1,2,3) e suas componentes em relao ao sistema xi , ( i = 1,2,3) , so relacionados na forma indicial como: xi = pij xj (1.101)
Esta relao corresponde a uma mudana de base de primeira ordem. Por exemplo, uma fora um tensor de primeira ordem. Uma entidade designada como um tensor de segunda ordem se ela tem 9 componentes tij , (i, j = 1,2,3) no primeiro sistema de coordenadas xi , (i = 1,2,3) e nove
, (i, j = 1,2,3) no segundo sistema xi, ( i = 1,2,3) , relacionadas na componentes tij
forma: = pik pjl tkl . tij (1.102)
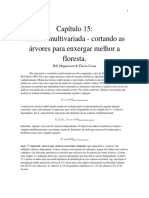
Nas definies anteriores, todos os ndices variavam de 1 a 3, indicando problemas a trs dimenses. No entanto, poderia-se usar os ndices variando de 1 at n, com n 3. Em muitos problemas da engenharia feito uma anlise considerando-se um comportamento bidimensional, neste caso n = 2. Tenses e deformaes em um ponto so exemplos de tensores de segunda ordem. Como exemplo de representao matricial e notao indicial de tensores de segunda ordem, dado as coordenadas de um tensor em relao a um sistema de eixos cartesianos (x, y), seja determinar as coordenadas deste tensor em relao a um outro sistema cartesiano de coordenadas (x, y), inclinado de = 450 em relao ao primeiro.
1.25
Elementos de lgebra Matricial
yy = 1 yx = -1 xx = 1
Y'
X' = 45 0
xy = -1
X
Figura 2. Representao vetorial dos componentes o tensor de tenses no plano XY. O tensor de tenses , em relao ao sistema de coordenadas X, Y pode ser escrito em forma matricial como:
[ ] =
xx yx
xy 1 1 = . yy 1 1
(1.103)
A matriz de rotao do sistema (x, y) em relao ao sistema (x, y) definido pelos cosenos diretores do primeiro sistema em relao ao segundo:
Y [P]X, X', Y' =
cos sen 1 1 1 = . 2 1 1 - sen cos
(1.104)
Fazendo:
Y [P] = [P]X, X', Y' ,
(1.105)
a mudana de base da representao do tensor de tenses se d como:
[ ]X',Y' = [P][ ][P]T =
1 1 1 1 1 1 1 1 0 0 = 2 1 1 1 1 2 1 1 0 2
(1.106)
Pode-se notar que as tenses cisalhantes em relao ao novo sistema so nulas, consequentemente, as tenses normais X'X' = 0 e Y'Y' = 2 , so as tenses principais atuantes e os respectivos eixos so chamados de eixos principais de referncia do 1.26
Elementos de lgebra Matricial
tensor de tenses analisado. De fato, as tenses principais definem os autovalores do tensor e os eixos X e Y definem os respectivos autovetores. Assim um elemento genrico do tensor [ ]X', Y' pode ser escrito, na forma indicial como:
T = pik kl plj ij .
(1.107)
T Como plj = pjl , e a ordem dos fatores irrelevante, obtm-se a expresso (1.102) :
= pik pjl kl . ij
(1.108)
1.7. DETERMINANTES 1.7.1. Introduo
Para uma matriz A quadrada de ordem n associada a um conjunto de n vetoes { v1 , v2 , L , vn } de R n , onde cada coluna (linha) de ordem i definida pelas coordenadas do correspondente vetor vi em R n , defini-se o determinante da matriz
A ou do conjunto de n vetores associados, como uma funo a valores reais, chamado de determinante de ordem n e designado de D(v1 , v2 , L, vn ) ou mais
diretamente relacionada matriz A como det(A): a11 a 21 A= M an1 a12 L a1n a22 L a2n det(A) = M M an2 L ann a11 a21 M an1 a12 L a1n a22 L a2n = aij , M M an2 L ann
(1.109)
onde as colunas (linhas) de A so as componentes dos vetores v1 , v2 , L, vn relativamente base cannica { e1 , e2 , L, en } de R n ; isto : v2 = a12 e1 + a22 e2 + L + an2 en M vn = a1n e1 + a2n e2 + L + ann en v1 = a11 e1 + a21 e2 + L + an1 en (1.110)
Esta funo, cuja forma explicita ainda no foi definida deve atender as seguintes condies: 1.27
Elementos de lgebra Matricial
i) D(v1 , v2 , L, vn ) = 0 ou aij = 0 , se e somente se: v1 , v2 , L , vn so linearmente dependentes; ii) D linear em cada uma de suas variveis; isto , para i = 1, L, n : D(v1 , L, vi + vi, L, vn ) = D(v1 , L, vi , L, vn ) + D(v1 , L, vi, L, vn ) para , quaisquer e
vetores vi, v1 , L , vi , L , vn quaisquer de R n ; iii) D(e1 , e2 , L, en ) = 1.
1.7.2 - Propriedades Bsicas dos Determinantes
A partir das condies exigidas no item anterior, podem ser definir as seguintes propriedades: i) Se um dos vetores v1 , v2 , L, vn o vetor zero, ento: D(v1 , v2 , L, vn ) = 0 . Para demonstrar esta propriedade seja o vetor v i = 0 , ento:
D(v1 , L, vi , L, vn ) = D(v1 , L,0.vi , L, vn ) = 0.D(v1 , L, vi , L, vn ) = 0 .
ii) Se vi = v j para i j , ento D(v1 , v2 , L, vn ) = 0 . Pela primeira exigncia do item anterior, como vi e v j D(v1 , v2 , L, vn ) = 0 so L.D. , ento
iii) Se a seqncia de vetores u1 , u2 , L, un obtida de v1 , v2 , L, vn permutando-se v i e v j , ento D(u1 , u2 , L, un ) = -D(v1 , v2 , L, vn ) .
A demonstrao dessa propriedade parte da substituio dos vetores v i e v j pelo vetor vi + vj em D v1 , L , vi , L , v j , L , vn
e expandindo a expresso resultante
utilizando a segunda exigncia do item anterior:
D(u1 , u2 , L, un ) =
1 j i
D(v1 , L, vi , L, vi , L, vn ) + D v1 , L, vi , L, v j , L, vn +
n 1 j j n
( ) D(v , L, v , L, v , L, v ) + D(v , L, v , L, v , L, v )
1.28
(1.111)
Elementos de lgebra Matricial
Como o primeiro e o quarto termo da expresso anterior so nulos em funo do item ii, resulta:
D v1 , L, v j , L, vi , L, vn = -D v1 , L, vi , L, v j , L, vn .
(1.112)
1.7.3. Definies
i) Se um seqncia de vetores u1 , u2 , L, un obtida de v1 , v2 , L, vn deslocando um dos
vetores vi k postos ou posies para a direita ou para a esquerda, ento:
D(u1 , u2 , L, un ) = (- 1) D(v1 , v2 , L, vn ) .
k
(1.113)
Supondo que ep(1 ) , ep(2 ) , L, ep(n ) seja uma permutao dos vetores da base padro de
Rn , ento com permutas sucessivas de pares de vetores nesta lista pode-se recoloc-los em sua ordem natural e1 , e2 , L, en . Pela propriedade iii do item anterior
tem-se:
D ep(1 ) , ep(2 ) , L, ep(n ) = D(e1 , e2 , L, en ) = 1 ,
(1.114)
sendo o sinal mais ou menos em funo do nmero de trocas exigidos para esta reordenao seja par ou seja impar. Assim, podemos definir que:
D ep(1 ) , ep(2 ) , L, ep(n ) = S(p ) = 1 .
(1.115)
ii) Seja { v1 , v2 , L , vn } um conjunto de n vetores quaisquer de R n . Assim, os vetores
v1 , v2 , L, vn podem ser definidos em funo da base padro de Rn como:
v1 = a11 e1 + a21 e2 + L + an1 en = a j1 e j v2 = a12 e1 + a22 e2 + L + an2 en = a j2 e j
j=1 n j=1 n
(1.116)
vn = a1n e1 + a2n e2 + L + ann en = a jn e j
j=1
1.29
Elementos de lgebra Matricial
O determinante deste conjunto de vetores, explicitamente como:
D(v1 , v 2 ,L, v n ) , fica definido
n n n D(v1 , v2 , L, vn ) = D a e , a e , , a e L jn j j=1 j1 j j=1 j2 j j=1 n n n = a j1D e , a e , L , a jn e j j1 j2 j j=1 j=1 j1 =1 n n n = a j1 a j2D e , e L , a e j j , jn j 1 2 j = 1 j1 =1 j2 =1 M
(1.117)
= a j1 a j2 L a jnD e j1 , e j2 , L, e jn
j1 =1 n j2 =1 jn =1
) )
=
j1 =1
L aj1 .aj2 L ajnD ej1 , ej2 , L, ejn
j2 =1 jn =1
termos no ocorre repetio entre os vetores reescrever a funo como: D(v1 , v2 , L, vn ) = S(p)ap(1 )1 .ap(2 )2 L ap(n )n ,
p n
Nesta ltima expresso, os nicos termos no nulos so aqueles para os quais a seqncia j1 , j2 , L, jn uma permutao dos nmeros 1, 2, L, n , pois apenas nestes
e j1 , e j2, L, e jn . Assim, pode-se
(1.118)
onde a notao utilizada indica que a soma estendida s n! permutaes de {1, 2, L, n}. iii) Seja D o determinante de uma matriz nxn qualquer. Para cada par de ndices ij (i,j =1,n) seja M ij o determinante (n-1) x (n-1) obtido de D eliminando-se a i-sima linha e a j-sima coluna, ento Aij = (- 1) M ij chamado o cofator do elemento aij , e
i+ j
M ij o determinante menor deste elemento.
1.7.4. Propriedades Complementares
i) Seja A uma matriz n x n e seja A' a matriz transposta de A, A'= AT , ento:
det(A) = det(A') .
(1.119)
1.30
Elementos de lgebra Matricial
ii) O valor do determinante de uma matriz no muda se for somado um mltiplo da jsima coluna (linha) i-sima coluna (linha) se i j. iii) Para todo determinante de uma matriz A (n x n), D = aij , tem-se: D = aijAij , j = 1, 2, L, n e D = aijAij , i = 1, 2, L, n ,
i=1 j=1 n n
(1.120)
sendo A ij o cofator do correspondente elemento a ij . iv) Para todo determinante de uma matriz A (n x n), D = aij , tem-se: D = aijAik = 0 , j, k = 1, 2, L, n e j k
i=1 n n
e: D = aijAkj = 0 , i, k = 1, 2, L, n e i k .
j=1
(1.121)
v) Uma condio necessria e suficiente para que um conjunto de n vetores { v1 , v2 , L , vn } em Rn seja linearmente dependente que D(v1 , v2 , L, vn ) = 0 . Assim, uma matriz A (n x n) no singular se e somente se det( A ) 0 . vi) O sistema de n equaes algbricas lineares a n incgnitas: a11 x1 + a21 x2 + L + an1 xn = b1 a12 x1 + a22 x2 + L + an2 xn = b2 , M a1n x1 + a2n x2 + L + ann xn = bn (1.122)
tem uma nica soluo se e somente se o determinante de seus coeficientes no nulo. Neste caso, a soluo do sistema dado por:
xj = ou:
b A
i=1 i
ij
, j = 1, 2, L, n
(1.123)
1.31
Elementos de lgebra Matricial
xj =
a11 L b1 M M an1 L bn
L a1n M L ann
a11 L a1j L a1n M M M an1 L anj L ann
, j = 1, 2, L, n
(1.124)
vii) Se A e B so matrizes n x n, ento:
det(AB) = det(A).det(B) .
(1.125)
1.7.5. Exemplos
i) Se n = 1, tem-se um nico vetor v1 = a1 e1 de R1 , ento:
D(v1 ) = D(a1 e1 ) = a1D(e1 ) = a1 . ii) Se n = 2, com: v1 = a11 e1 + a21 e2 e v2 = a12 e1 + a22 e2 de R 2 , ento: D(v1 , v2 ) = aij = a11 a21
(1.126)
a12 = S(p1 )a11 a22 + S(p2 )a21 a12 = a11 a22 - a21 a12 , (1.127) a21
sendo os sinais de S(pi ) determinados contando-se o nmero de inverses no arranjo dos (primeiros) ndices nos termos correspondentes.
v1 = a11 e1 + a21 e2 + a31 e3 iii) Se n = 3, com: v2 = a12 e1 + a22 e2 + a32 e3 de R 3 , ento: v = a e + a e + a e 13 1 23 2 33 3 3 a11 D(v1 , v2 , v3 ) = aij = a21 a31 a12 a22 a32 a13 a23 = a33
(1.128)
= a11 a22 a33 + a21 a32 a13 + a31 a12 a23 a31 a22 a13 a21 a12 a33 a11 a32 a23
iv) A expanso de um determinante em cofatores simplifica a soluo no caso da maioria dos elementos de uma linha ou coluna ser nulo. Assim: 1.32
Elementos de lgebra Matricial
3 1
D = 0 2 0 = 3. 0 3 5
2 0 3 5
= 3.2. 5 = 3.2.5 = 30 ;
(1.129)
e:
2 -1 D= 0 4 1 2
3 - 6 = 2. 7
1 -6 2 7
+ 4.
-1 1
3 -6
= 2.(1.7 - 2.(-6)) + 4.((-1).(-6) - 1.3) = 38 + 12 = 50
(1.130) v) Seja o caso da decomposio de uma matriz, na forma: A = LTLT , sendo L uma matriz triangular inferior de diagonal unitria. Como o det(L ) = det(LT ) = 1 : det(A) = det(L ).det(D).det(LT ) = det(D) = dii .
i-1 n
(1.131)
Observao: A soluo de sistemas de equaes utilizando determinantes extremamente ineficiente, existindo procedimentos bem mais eficientes. Por exemplo, usando operaes matriciais elementares, tais como no mtodo de eliminao de Gauss, que transforma a matriz dos coeficientes numa matriz triangular, que por sua vez admite uma soluo explicita de grande simplicidade.
1.33
You might also like
- Compilado Logica ProgramaçãoDocument27 pagesCompilado Logica ProgramaçãoOrlando Junior100% (2)
- Lab Sinais SistemasDocument75 pagesLab Sinais SistemasAlex GranjeNo ratings yet
- Lista8 MLBDocument19 pagesLista8 MLBLeandro MarcelinoNo ratings yet
- Exemplos de Programas em FortranDocument27 pagesExemplos de Programas em FortranLauro Da Silva DspNo ratings yet
- ElasticidadeDocument9 pagesElasticidadeLeandro MarcelinoNo ratings yet
- Apostila Metodos NumericosFormatada VFDocument107 pagesApostila Metodos NumericosFormatada VFBernardo KovalskiNo ratings yet
- Curso MEF Alvaro AzevedoDocument18 pagesCurso MEF Alvaro AzevedoLeandro MarcelinoNo ratings yet
- Cap3 - Mecanica Das Estruturas - Formulação Do Método Da RigidezDocument31 pagesCap3 - Mecanica Das Estruturas - Formulação Do Método Da RigidezVictor GabrielNo ratings yet
- Cap4 - Mecanica Das Estruturas - Problemas ResolvidosDocument51 pagesCap4 - Mecanica Das Estruturas - Problemas ResolvidosLeandro MarcelinoNo ratings yet
- Analise Modal de Estruturas Via AnsysDocument15 pagesAnalise Modal de Estruturas Via Ansysrafafranca2No ratings yet
- MultaDocument1 pageMultaLeandro MarcelinoNo ratings yet
- Cap3 - Mecanica Das Estruturas - Formulação Do Método Da RigidezDocument31 pagesCap3 - Mecanica Das Estruturas - Formulação Do Método Da RigidezVictor GabrielNo ratings yet
- Apostila de Análise Matricial de EstruturasDocument46 pagesApostila de Análise Matricial de EstruturasLilliuntNo ratings yet
- Cap2 - Mecanica Das Estruturas - Conceitos Básicos Da Mecânica Das EstruturasDocument28 pagesCap2 - Mecanica Das Estruturas - Conceitos Básicos Da Mecânica Das EstruturasLeandro MarcelinoNo ratings yet
- SJCDocument1 pageSJCLeandro MarcelinoNo ratings yet
- PetrobrásDocument2 pagesPetrobrásLeandro MarcelinoNo ratings yet
- Aula 08-08-2011Document1 pageAula 08-08-2011Leandro MarcelinoNo ratings yet
- Aula-1-Espaços Vetoriais-1Document37 pagesAula-1-Espaços Vetoriais-1Gabriel UrbanoNo ratings yet
- Aula 4-Seção 14.4Document70 pagesAula 4-Seção 14.4PAULO JUNIORNo ratings yet
- Resumo Dos Espaços VetoriaisDocument6 pagesResumo Dos Espaços Vetoriaisluiz13eduardoNo ratings yet
- Estrutura de Dados C++Document179 pagesEstrutura de Dados C++Slow tfkNo ratings yet
- Algebra Matricial PDFDocument74 pagesAlgebra Matricial PDFdanielNo ratings yet
- Apresentação Algebra 2.1Document23 pagesApresentação Algebra 2.1bruno figueiredoNo ratings yet
- 02 - Espaço e Subespaço VetorialDocument14 pages02 - Espaço e Subespaço Vetorialmatheus guimaraesNo ratings yet
- Notas de Aula Algebra LinearDocument107 pagesNotas de Aula Algebra LinearRickCSNo ratings yet
- Equações Dinâmicas de Sistemas LinearesDocument61 pagesEquações Dinâmicas de Sistemas LinearesAdriano SantosNo ratings yet
- Lb-Algebra Linear I20072Document2 pagesLb-Algebra Linear I20072anon_928331218No ratings yet
- PUD Engenharia CivilDocument157 pagesPUD Engenharia Civillilo limaNo ratings yet
- Espaco Vetorial AbstratoDocument16 pagesEspaco Vetorial AbstratoDenis MonteiroNo ratings yet
- Algebra Linear M I-06006 0Document2 pagesAlgebra Linear M I-06006 0Beatriz CostaNo ratings yet
- Comp Numerica Notas de AulaDocument193 pagesComp Numerica Notas de AulaMont EM JrNo ratings yet
- Simetrias Do Espaço-Tempo e Vetores de Killing: Diego Sier de FariaDocument89 pagesSimetrias Do Espaço-Tempo e Vetores de Killing: Diego Sier de FariaLuiz FernandoNo ratings yet
- Geometria Analítica Livro Texto - Unidade IIDocument70 pagesGeometria Analítica Livro Texto - Unidade IIGabriel HenriqueNo ratings yet
- 1.10 Sistemas de Coordenadas Cartesianas: V, V, V R R R R R R R R R R R R R R RDocument9 pages1.10 Sistemas de Coordenadas Cartesianas: V, V, V R R R R R R R R R R R R R R Rdouglas correa cavassoNo ratings yet
- Relatório 2 Álgebra Linear e Geometria Analítica - CópiaDocument23 pagesRelatório 2 Álgebra Linear e Geometria Analítica - CópiaEdmar RamosNo ratings yet
- Física 14-05-2012 Exercícios VetoresDocument4 pagesFísica 14-05-2012 Exercícios VetoresLucas MendesNo ratings yet
- ALGA Lista IXDocument6 pagesALGA Lista IXcarolsilveiraaNo ratings yet
- Lista Sem8 2022Document2 pagesLista Sem8 2022Felipe AizicNo ratings yet
- Exercicios JavaDocument12 pagesExercicios JavaMatheus EdneiNo ratings yet
- Apostila de Álgebra Linear e GADocument49 pagesApostila de Álgebra Linear e GARodrigo Guilherme RaimundoNo ratings yet
- Quimica Geral Aula 2Document27 pagesQuimica Geral Aula 2Hertz Motores ElétricosNo ratings yet
- Capítulo 15 - Cortando As Arvores para Enxergar Melhor A FlorestaDocument27 pagesCapítulo 15 - Cortando As Arvores para Enxergar Melhor A FlorestaThabata CavalcanteNo ratings yet
- AM I Exercicios ALGEBRADocument101 pagesAM I Exercicios ALGEBRAEmanuelsön Caverä BreezÿNo ratings yet
- Geometria Analítica 1Document8 pagesGeometria Analítica 1Daniel JacksonNo ratings yet
- Geometria AnalíticaDocument74 pagesGeometria AnalíticaPresley SilvaNo ratings yet