Professional Documents
Culture Documents
Elementi Isoparametrici
Uploaded by
vincemugnaioCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Elementi Isoparametrici
Uploaded by
vincemugnaioCopyright:
Available Formats
FORMULAZIONE ISOPARAMETRICA
Introduzione
L'utilizzo di elementi finiti di ordine elevato consente di ridurre il numero di elementi necessari per l'ottenimento di una soluzione sufficientemente precisa del problema in quanto meglio approssimano l'andamento della funzione incognita. Per poter assicurare che un numero ridotto di elementi sia in grado di descrivere forme complesse necessario che detti elementi siano in grado di descrivere anche profili curvi e quindi avere in generale lati e facce distorte e non gi solo rettilinee o piane. La difficolt di trattare con la formulazione diretta elementi definiti mediante linee e/o superfici curve ha portato allo sviluppo di una formulazione "parametrica" che svincola la rappresentazione del dominio di integrazione dalla effettiva geometria dell'elemento mediante una trasformazione del sistema di riferimento in cui si opera. Con questa tecnica possibile realizzare facilmente famiglie comprendenti elementi lineari, parabolici e cubici (nelle normali implementazioni). Con la formulazione parametrica viene abbandonato il dominio fisico definito dal riferimento cartesiano ortogonale, nel caso pi generale a 3 dimensioni xyz, in cui viene descritto l'elemento finito, per trasferirsi in un dominio regolare, definito da coordinate normalizzate, rst, nel quale le linee sono diritte, le superfici piane. La scelta della normalizzazione normalmente effettuata tra 0 ed 1 o tra -1 ed 1 a seconda della soluzione pi conveniente. Cos facendo gli elementi assumono forme che, definite indipendentemente dalla geometria effettiva di quelli originali, sono sempre le stesse e dipendono solo dalla tipologia base degli elementi: le forme si riducono quindi a quelle elementari di segmenti rettilinei, triangoli equilateri, quadrati a lati diritti, tetraedri o cubi a facce piane e spigoli costituiti da segmenti di retta. Questa trasformazione inoltre, non dipende dalla dimensione dello spazio di definizione dell'elemento ma solo dalla sua tipologia: per esempio un elemento bidimensionale di forma quadrangolare verr trasformato comunque in un quadrato anche se definito in uno spazio tridimensionale e caratterizzato da una geometria non regolare. L'operatore di interpolazione non modificato nella sua struttura dalla presenza di questa trasformazione, se non nel fatto che le singole funzioni di forma sono definite con polinomi nelle coordinate adimensionali. Al contrario le derivate di
060eliso.doc
queste funzioni dovranno essere opportunamente trattate per tenere conto delle diverse metriche del riferimento fisico e adimensionale. Questa operazione viene detta con terminologia anglosassone mappatura (MAPPING) e , per poter essere certi della correttezza della trasformazione, occorre che essa sia tale da definire un rapporto biunivoco tra i punti omologhi appartenenti ai due spazi xyz e rst. Mediante questo tipo di rappresentazione possibile trattare elementi comunque distorti, sempre che tale distorsione non sia tanto forte da fare cadere la propriet di corrispondenza appena citata; il termine distorsione racchiude in realta diversi elementi quali: curvatura, torsione, allungamento, scorrimento. In generale le limitazioni sulle distorsioni ammissibili sono conseguenti alla necessit di ottenere un buon comportamento da parte dell'elemento e verranno discusse nel seguito e non soltanto mantenere un legame biunivoco tra i due domini.
Formulazione
Affrontiamo il problema della formulazione parametrica di un elemento con il caso piuu generale di un elemento solido che descrive uno stato tridimensionale di sforzo. La definizione delle regole di trasformazione tra il dominio fisico e quello adimensionale richiede, in realtaa, di stabilire una relazione tra le due geometrie; cio dobbiamo trovare due relazioni, che nel caso pi generale di elemento tridimensionale possiamo esprimere come: {xyz} f (rst ) ; {rst} g( xyz ) (1) Queste relazioni ci permettano di effettuare il passaggio da un sistema all'altro: esse ci forniscono, note le coordinate di un punto in uno dei due riferimenti, le coordinate del punto omologo nell'altro. In realt, come vedremo, la trasformazione esplicitamente utilizzata soltanto quella per la determinazione delle coordinate fisiche xyx assegnata una terna di valori delle coordinate normalizzate rst. La maniera pi conveniente e generale per definire questa trasformazione quella di attuare una forma di interpolazione delle quantit geometriche che definiscono l'elemento, vale a dire le coordinate nodali: si interpolano cio le coordinate fisiche x,y,z ,come se fossero una funzione qualsiasi, mediante un operatore del tutto analogo a quello utilizzato per effettuare la interpolazione dello spostamento; in questo caso le coordinate fisiche di un generico punto di coordinate normali rst vengono calcolate con le relazioni:
x = [ N '( r ,s,t )]{X} y = [ N '( r ,s,t )]{Y}
(2a) (2b) 2
060eliso.doc
z = [ N '( r ,s,t )]{Z}
(2c)
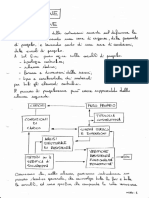
ove i vettori {X},{Y} e {Z} contengono le coordinate xyz dei nodi dell'elemento; l'operatore [N'(r,s,t)] normalmente realizzato con formule di interpolazione che risultano particolarmente semplici da definire nel dominio normalizzato; infatti possibile sfruttare le simmetrie del campo oltre che la sua normalizzazione. Bench la struttura dell'operazione sia la stessa l'operatore di interpolazione della geometria stato contrassegnato con l'apice per mantenerlo, a priori, distinto da quello utilizzato per l'interpolazione degli spostamenti. In questo modo possibile che il numero di nodi utilizzati per le due interpolazioni, e quindi la forma delle funzioni ad essi associate, siano differenti; si possono presentare allora tre casi distinti descritti in figura:
Spostamenti Geometria
Sub-parametrico
Iso-parametrico
Super-parametrico
Elementi SUB-PARAMETRICI: in questo caso il numero di nodi in cui nota la geometria inferiore rispetto a quello che descrive la funzione incognita: una soluzione di questo genere pu essere adottata nel caso in cui la forma dell'elemento sia geometricamente semplice ma si desideri descrivere uno stato di deformazione e sforzo pi complesso. Una possibile applicazione quella di un infittimento automatico del modello: poich la geometria regolare, le coordinate del nodo centrale aggiuntivo possono essere facilmente calcolate a partire da quelle dei nodi di vertice. Elementi ISO-PARAMETRICI se il numero di nodi in cui sono note le funzioni spostamento e geometria sono uguali; il tipo di elemento pi diffuso in quanto semplice ed efficiente. Elementi SUPER-PARAMETRICI: in questo caso il numero di nodi in cui nota la funzione geometria supera quello che descrive lo spostamento; l'utilit pu essere riscontrata nel caso di elementi piuttosto distorti, per i quali si desideri una descrizione degli spostamenti di ordine limitato, per esempio per ottenere uno stato di sforzo costante. Si tratta peroo di una procedura quantomeno discutibile: se la geometria complessa, nulla autorizza a ritenere che lo stato di sforzo sia descrivibile con una funzione di ordine ridotto. La distinzione tra queste categorie di elementi in realt piuttosto accademica, infatti normalmente, per la semplicit della formulazione, per le caratteristiche di buon funzionamento ma soprattutto per la semplicit di utilizzo, data dalla univocit della definizione dei nodi, si tende ad implementare elementi di tipo isoparametrico: [ N ] = [ N' ] . In generale se {w} il vettore delle coordinate di un punto, definito come {w } = [ x , y , z ]T , e [W] la matrice in cui sono organizzate le coordinate degli n nodi dell'elemento avremo che:
{w} = [ N '( r ,s,t )][ W ]
(3)
ove le matrici [N'] e [W] potranno avere, per esempio, una struttura del tipo
060eliso.doc
LM{X}OP [ W ] = M {Y} P MN {Z} PQ
LM{XYZ }OP [W ] = M � P MN{XYZ }PQ
1 n
Come di solito accade, le diverse componenti nodali sono interpolate con la medesima funzione di forma. Si puoo anche pensare ad una organizzazione alternativa, con le coordinate x,y e z relative ad un nodo raggruppate vettore delle coordinate nodali:
LM N' [ N' ] = M 0 MN 0
� N' n 0 0 0 0
0 0 0 N' 1 � N' n 0 0 0
0 0 0 0 0 0 N' 1 � N' n
OP PP Q
In questo caso, l'operatore di interpolazione assumerebbe la forma:
1
LM N' [ N' ] = M 0 MN 0
0 N' 1 0
0 0 N' 1
N' n 0 0
0 N' n 0
0 0 N' n
OP PP Q
Per procedere con la formulazione di un elemento, ricordamdo che per la definizione delle deformazioni sono necessarie le derivate rispetto alle coordinate fisiche. Le funzioni di interpolazione sono definite nel dominio adimensionale e possono facilmente essere derivate rispetto a tali coordinate; non siamo invece in grado di traformare facilmente le derivate secondo le coordinate adimensionali in derivate secondo le coordinate fisiche. Vediamo come occorre trasformare i termini di derivata locale per tenere conto della effettiva forma del dominio. Le espressioni dei termini N / x , N / y , N / z potrebbero essere facilmente determinate ricordando le consuete regole di differenziazione parziale:
N N r N s N t = + + x r x s x t x N N r N s N t = + + y r y s y t y N N r N s N t = + + z r z s z t z
Questa espressione non risulta essere di utilitaa pratica in quanto i termini
disponibili. Le relazioni che ci servono per la determinazione delle derivate nel sistema globale possono essere ricavate dalle relazioni inverse:
r s t , , ... non sono x x x
N N x N y N z = + + r x r y r z r
(9a)
che possono essere convenientemente organizzate in forma matriciale ottenendo:
N R | N S | TN
/r /s /t
U LM x | = Mx V | W MN x
/r /s /t
y /r y /s y /t
z /r z /s z /t
N OP R | N PP S Q| TN
/x /y /z
N R U | | = [ J ]S N V | TN W |
/x /y /z
U | V | W
(10)
060eliso.doc
[J] la matrice dello Jacobiano della trasformazione. Della relazione matriciale (10) noto il termine a sinistra espressione delle derivate delle funzioni di forma in coordinate locali per cui invertendo la relazione otteniamo finalmente il legame desiderato: le derivate globali delle funzioni di forma sono pertanto espresse dalla relazione
(11) I coefficienti che costituiscono la matrice Jacobiano possono essere determinati utilizzando le derivate delle (2) e scrivendo 9 equazioni del tipo:
/z /t
N R | N S | TN
/x /y
U | = [J ] V | W
N R | N S | TN
/r /s
U | V | W
.....
x / r = [ N ' ( r ,s,t ) / r ]{X} x / s = [ N ' ( r ,s,t ) / s ]{X}
(12a) (12b)
che esprimono la variazione della generica coordinata fisica nei confronti delle coordinate adimensionali come prodotto delle derivate delle funzioni di interpolazione della geometria rispetto alle coordinate locali per le coordinate fisiche nodali corrispondenti. Operativamente, tenendo conto di queste definizioni, la matrice Jacobiano pu essere calcolata semplicemente come:
LM N [J] = MN MN N
' 1/ r ' 1/ s ' 1/ t
' N2 /r ' N2 /s ' N2 /t
' � Nn /r ' � Nn /s ' � Nn /t
OPLM xx yy PPMM � � QMN x y
1 2 n
OP P � P z P Q
z1 z2
n
(13)
L'inevitabilit della matrice [J] riflette le condizioni di univocit della mappatura del dominio reale in quello adimensionale viste in precedenza; vedremo che su questo elemento potr essere fondato un criterio di controllo del livello di distorsione geometrica dell'elemento. Esempi di calcolo di matrice Jacobiana: Elemento rettangolare Elemento trapezoidale Elemento triangolare Calcolo della matrice di rigidezza Sviluppiamo la procedura per la formulazione isoparametrica facendo riferimento rigidezza di un elemento che, come precedentemente visto, definita come: [ K el ] = [ B]T [ C ][ B]dv (4) alla matrice di
con [ B] = [ D][ N ] e dove compaiono i termini: [N] operatore di interpolazione dello spostamento funzione del posto [ D] operatore formale di derivazione [C] matrice elastica del materiale Nella matrice [ D] , per come stata impostata la formulazione agli spostamenti dell'elemento finito, compaiono termini globali di derivazione rispetto alle coordinate xyz; nel caso di elemento in stato completo di sforzo abbiamo la usuale forma dell'operatore di derivazione:
060eliso.doc
Alla luce di quanto visto la matrice [B] viene costruita utilizzando i termini di derivate nel dominio fisico valutati trasformando le derivate adimensionali, associate a ciascun nodo, con la matrice inversa dello Jacobiano L'applicazione al caso specifico della formula di integrazione numerica, in particolare di Gauss-Legendre, porta alla seguente relazione:
LM/ x MM 0 0 [ D] = M MM / y MN /0z
0 /y 0 /x 0 /z
0 0 /z 0 /x /y
OP PP PP PP Q
[ K el ] = c i c j c k f ( x ijk , y ijk , z ijk ) dV
i j k
(6)
in cui si definita la funzione integranda come f ( x, y, z ) = [ B]T [C][ B] e dove sono state identificate con il suffisso ijk le coordinate fisiche corrispondenti ai punti nei quali la formula di integrazione prevede la valutazione della funzione, di coordinare (ri , s j , t k ) . Poich questi punti sono noti nel dominio adimensionale, le coordinate fisiche sono valutate mediante le (2) come:
x ijk = [ N' (ri , s j , t k )]{X} yijk = [ N' (ri , s j , t k )]{Y}
(7)
z ijk = [ N' (ri , s j , t k )]{Z}
Se possibile ritenere che il materiale abbia caratteristiche uniformi in tutto l'elemento il solo termine da valutare [ B] = [ D][ N ] , altrimenti occorrer definire uno schema di interpolazione anche per le caratteristiche elastiche rappresentate dalla matrice [C]; il caso dei materiali compositi per i quali, in un elemento solido utilizzato per modellare un laminato spesso e curvo, presentano un'orientazione dell'ortotropia che cambia da punto a punto. Infine nella formula di integrazione si deve tenere conto della variazione dei limiti di integrazione e quindi del legame esistente tra l'elemento di volume nel riferimento fisico dell'elemento dV=dx dy dz e in quello locale dV=dr ds dt; questo legame riconducibile alla relazione: dx dy dz = det[J] dr ds dt pertanto, in ultima analisi, la (6) assume la forma operativa:
[ K el ] = c i c jc k [ B( x ijk , y ijk , z ijk )]T [ C][ B( x ijk , y ijk , z ijk )] det[ J ijk ]
i j k
(14)
Calcolo di un vettore di forze elemento Esaminiamo la procedura per la valutazione del termine di lavoro esterno che porta alla definizione del vettore di carichi nodali equivalenti.
{Qel } = [ N ]T {F }dv
V
L'applicazione al caso specifico della formula di integrazione numerica porta alla seguente relazione:
060eliso.doc
pertanto, in ultima analisi, la (6) assume la forma operativa:
i j k
{Qel } = ci c j ck [ N ( xijk , yijk , zijk )]T {F ( xijk , yijk , zijk )} det[ J ( xijk , yijk , zijk )]
(14)
COMPENDIO PROCEDURA La procedura di calcolo pu` essere sintetizzata come segue: 1. Azzeramento della matrice elemento 2. Definizione dei punti di integrazione (posizione e pesi) 3. Per ogni punto di integrazione Calcolo delle funzioni di forma e delle loro derivate Determinazione della matrice Jacobiano e del suo determinante Aggiornamento delle derivate delle funzioni di forma mediante la matrice Jacobiano Accumulo del prodotto [B]T[D][B] det[J] moltiplicato per il peso del punto di integrazione
Sviluppo di elementi isoparametrici
Elemento isoparametrico di asta
L'elemento di asta ricavato con in metodo diretto , come gi detto, solo impropriamente un elemento finito in quanto, limitatamente alle ipotesi di lavoro di elemento a sezione costante caricato soltanto agli estremi, la soluzione che fornisce esatta. Lo sviluppo di un elemento parametrico come quello di seguito riportato interessante in quanto permette di estendere la validit del modello al di fuori delle ipotesi di base classiche, oltre che consentire di realizzare elementi a 3 o 4 nodi che risultano essere compatibili con gli elementi isoparametrici bi- e tridimensionali a sviluppo bi-parabolico o bi-cubico. Si adotti la convenzione che i primi due nodi siano le estremit dell'asta e il terzo nodo quello intermedio. Definiamo i vettori {x} e {a} costituiti rispettivamente dall'unione delle coordinate e degli spostamenti nodali dell'elemento:
{x} = [x1 x2 x 3 ]T {a} = [u1 u 2 u 3 ]T
che, per la struttura assunta per i vettori geometria e spostamento, verranno organizzate come: [N] = [ N1 N 2 N3 ] dove le singole funzioni di forma sono:
N1 = r(r 1) / 2
N 2 = r(r + 1) / 2
N3 = (1 r 2 )
Per la determinazione dello Jacobiano dovremo utilizzare le loro: [N / r ] = [ N1/ r N 2 / r N3 / r ] = [ (2r 1) / 2 (2r + 1) / 2 2r ] infatti: [J(r)] = [ x / r (r)] = [N / r (r)]{x} = x1 (2r 1) / 2 + x 2 (2r + 1) / 2 x 3 2r == ( x1 + x 2 2x 3 ) r + (x 2 x1 ) / 2
Possiamo ora determinare le derivate delle funzioni di forma nel dominio fisico scalandole con il rapporto tra le coordinate: [N / x (x)] = [J(r)]1 [N / r (r)] Possiamo ora costruire l'operatore [B], che tenendo conto del caso specifico assume la forma:
7
060eliso.doc
[B] = [ N1/ x N 2 / x N3 / x ] A questo punto abbiamo a disposizione tutti gli elementi necessari per procedere all'integrazione numerica della matrice di rigidezza, di quella di massa e del vettore di termini noti con la formula di Gauss-Legendre:
[K el ] = ci [B(x i )]T k Assiale (x i )[B(x i )] det[J(x i )] [M el ] = ci [N(x i )]T m(x i )[N(x i )] det[J(x i )] {Fel } = ci [N(x i )]T f (x i ) det[J i ]
i =1 i =1 npi i =1 npi npi
Elemento isoparametrico di membrana
In questo paragrafo viene descritta la formulazione dell'elemento finito di membrana quadrangolare in stato piano di sforzo; viene proposto in maniera completa lo sviluppo relativo al caso bidimensionale. Per quanto riguarda l'elemento triangolare, data la maggiore efficienza, viene presentato un apposito sviluppo del tutto indipendente.
QUADRANGOLO
Sviluppiamo la formulazione per il generico elemento quadrangolare lineare a quattro nodi descritto in figura:
r=-1 2 s r=0 r=1/2 1 r=1 s=1
y 3 4 x s=-1
s=0 r s=-1/2
Il sistema di riferimento locale scelto in modo che le coordinate adimensionali r,s assumono valore unitario, positivo o negativo, sui lati dell'elemento. Nella figura i nodi sono stati identificati in maniera arbitraria partendo dal vertice superiore destro e procedendo in senso antiorario: mantenendo coerente il verso di numerazione, orario o antiorario, sarebbe per possibile partire da uno qualsiasi dei vertici. La scelta di una particolare sequenza, all'attuale livello del problema, del tutto ininfluente sulla formulazione dell'elemento e serve solo a stabilire il verso della normale all'elemento stesso, o in generale l'orientazione del sistema di riferimento locale. Nel caso pi generale di un elemento comunque orientato in uno spazio tridimensionale l'orientazione del riferimento locale determina anche la direzione di applicazione positiva delle forze per unit di superficie eventualmente applicate all'elemento stesso. Nel caso piano e se il materiale dell'elemento di tipo isotropo, l'orientazione del riferimento locale non ha alcuna importanza. Se il materiale non isotropo, esistendo una direzione preferenziale per la sua orientazione, il riferimento locale pu essere utilizzato per la individuazione di questa direzione in alternativa alla definizione di un apposito sistema di riferimento: se per esempio l'orientazione segue la curvatura locale, questa viene ben descritta dalle linee a coordinata adimensionale costante e sarebbe possibile valutare tale parametro per ogni punto di integrazione, in forma automatica, senza richiedere la definizione di altrettanti sistemi di riferimento.
060eliso.doc
Si ricordi che un elemento bidimensionale pu comunque essere impiegato in un modello tridimensionale trasformando le matrici ed i vettori relatici, con le usuali tecniche. Definiamo i vettori {x} e {u} costituiti rispettivamente dall'unione delle coordinate e degli spostamenti nodali dell'elemento:
{x} = [x1 {a} = [u1 y1 v1 x2 u2 y2 v2 x3 u3 y3 v3 x4 u4 y 4 ]T v 4 ]T
avendo optato per un elemento isoparametrico le funzioni di forma sono comuni all'interpolazione della geometria e dello spostamento; con la numerazione adottata le funzioni utilizzate sono lineari:
1 1 N 1 = (1 + r ) (1 + s ) 4 ; N 2 = (1 r ) (1 + s ) 4 1 1 N 3 = (1 r ) (1 s ) 4 ; N 4 = (1 + r ) (1 s ) 4
che, per la struttura assunta per i vettori geometria e spostamento, verranno organizzate come:
[N] =
LM N 0 N 0 N 0 N 0 OP N0N 0N 0N 0 N Q
1 2 3 4 1 2 3 4
derivando le funzioni di forma rispetto alle coordinate locali:
1 N1/ r =+(1+s) 4 1 N 2 =(1+s) 4 /r 1 N 3/ r =(1s) 4 1 N 4 / r =+(1s) 4
; ; ; ;
1 N1 =+(1+s) 4 /s 1 N 2 =+(1 r ) 4 /s 1 N 3/ s =(1 r ) 4 1 N 4 / s =(1+ r ) 4
Per poter scrivere le derivate dellefunzioni di forma nel dominio fisico occorre trasformarle con con la matrice Jacobiano valutata sempre nel punto di interesse: [N / (x, y)] = [J(r, s)]1[N / (r, s)] Per la valutazione dello Jacobiano viene utilizzata la relazione: x / r y /r [J(r,s)] = x /s y /s ove il generico coefficiente viene determinato mediante il prodotto delle derivate delle funzioni di forma per le coordinate nodali; questa operazione organizzata in forma matriciale:
[J ] =
LM N MN N
1/ r 1/ s
N 2/ r N 2/s
N 3/ r N 3/ s
N 3/ r N 4/s
pertanto la matrice [B] assume la forma:
LM/ x [ D] = 0 MM / y N
Poich stiamo lavorando in stato piano di sforzo l'operatore di derivazione, che definisce la matrice [B], necessaria per la determinazione della matrice di rigidezza, attraverso la relazione [ B] = [ D][ N ], viene definito come:
LM x OP M x PQ MM x Nx
1 2 3 4
OP y P y P P y Q
y1
2 3 4
OP /y PP / xQ
0
060eliso.doc
LM N [ B] = M 0 MN N
1/ x
0 N 2 / x 0 N 3/ x 0 N 4 / x 0
N 1/ y 0 N 2 / y 0 N 3 / y 0 N 4 / y N 1/ x N 2 / y N 2 / x N 3 / y N 3 / x N 4 / y N 4 / x
1/ y
OP PP Q
A questo punto abbiamo a disposizione tutti gli elementi necessari per procedere all'integrazione della matrice di rigidezza mediante integrazione numerica con la formula di Gauss-Legendre:
[K el ] = ci c j [B(x ij , yij )]T t(x ij , yij )[C(x ij , yij )][B(x ij , yij )] det[J ij ]
i =1 j=1
npir npis
La procedura prevede quindi che, una volta stabilito il numero di punti di integrazione nelle due direzioni, npir ed npis, si provveda, per ciascuno di essi, quindi attuando un doppio ciclo sugli indici i,j, ad eseguire le seguenti operazioni: determinazione delle coordinate del punto di integrazione, in termini adimensionali ri,sj, e del rispettivo peso wij=cicj; questo viene ottenuto come prodotto dei pesi di formule monodimensionali e sono dedotti, come le coordinate, dalle apposite tabelle. valutazione, nel punto di integrazione, dei valori delle funzioni di forma [ N ( ri , s j )] e delle loro derivate [ N / r ( ri , s j )] ed [ N / s ( ri , s j )] , per tutti i nodi dell'elemento; valutazione delle coordinate fisiche x ij , y ij del punto di integrazione di coordinate adimensionali ri,sj; questa operazione consiste nella interpolazione della coordinate nodali che in notazione matriciale si riduce al prodotto {x ij } = [ N ( ri , s j )]{w} nel quale i termini della matrice [N] si intendono valutati nel punto di integrazione individuato dalle coordinate ri,sj. valutazione dello Jacobiano: [ J ] =
inversione dello Jacobiano aggiornamento delle derivate delle funzioni di forma: [ N ( x ij , yij )] = [ J (ri , s j )] 1 [ N' (ri , s j )] costruzione della matrice [B] nel riferimento globale interpolazione, se necessaria, dello spessore nel punto di integrazione t ij = [ N ( ri , s j )]{t} accumulo del prodotto integrazione wij
LM N OP[ XY ] NN Q
i/r i/s
t [ B]T [C][ B] det[ J ]
pesato con il coefficiente relativo al punto di
L'estensione al caso parabolico dell'elemento ora visto particolarmente semplice: tutte le matrici ed i vettori vengono espansi per tenere conto degli 8 nodi dell'elemento parabolico; per quanto riguarda le funzioni di forma possibile semplicemente effettuare il calcolo esplicito di tutti i termini secondo gli schemi esaminati nella definizione delle famiglie di funzioni di interpolazione, oppure usare una tecnica che permetta di ottenere le funzioni di forma per composizione di termini lineari e di una correzione dovuta a quelli parabolici.
PROGRAMMI FORTRAN Di seguito vengono riportati i listati di alcuni sottoprogrammi FORTRAN che implementano l'elemento di membrana quadrangolare nel caso bidimensionale:
QUAD8D2 - Costruisce la matrice di rigidezza dell'elemento lineare/parabolico STRQ8D2 - Calcolo degli sforzi nell'elemento DAT2D - Determina le coordinate ed i pesi di un punto di integrazione dato l'ordine di integrazione FORM2D - Calcola le funzioni di forma e le loro derivate JAC2D - Determinazione dello Jacobiano e trasformazione delle derivate
10
060eliso.doc
C C C C
SUBROUTINE QUAD8D2(XYL,ICO,THC,E,NGAUSS,NCONR,ELMAT,AREA) SUBROUTINE PER IL CALCOLO DELLA MATRICE DI RIGIDEZZA DI UN ELEMENTO IN COORDINATE GLOBALI E DEL RELATIVO VETTORE DI PIAZZAMENTO IMPLICIT REAL*8 (A-H,O-Z) DIMENSION XYL(2,8), ICO(*),ENNE(3,8) DIMENSION ELMAT(16,16),RN(3,16),CPI(2),RNE(16,3), E(3,3),D(3,3) XYL(2xNODI) MATRICE DELLE COORDINATE NODALI DELL'ELEMENTO ICO(NODI) VETTORE DI NUMERAZIONE DELL'ELEMENTO THC SPESSORE DELL'ELEMENTO (COSTANTE) E(3x3) MATRICE ELASTICA DEL MATERIALE (UNIFORME) NGAUSS N. DEI PUNTI DI INTEGRAZIONE UGUALE PER LE DUE DIREZIONI NCONR NUMERO DI NODI EFFETTIVI DELL'ELEMENTO ELMAT(2*NCONRx2*NCONR) MATRICE DI RIGIDEZZA DELL'ELEMENTO AREA AREA DELL'ELEMENTO ENNE(3x8) MATRICE FUNZIONI DI FORMA E DERIVATE RN(3x16) MATRICE B RNE(3x16) AREA DI SERVIZIO PER PRODOTTO Btras x E D(3X3) MATRICE ELASTICA MOLTIPLICATA PER COEFF. INTEGRAZIONE CPI(2) COORDINATE FISICHE DEI PUNTI DI INTEGRAZIONE AZZERAMENTO MATRICI CALL ZERO(RN,3*16) CALL ZERO(ELMAT,16*16) AREA=0 DOPPIO CICLO DI INTEGRAZIONE DO 10 IPT=1,NGAUSS DO 10 LPT=1,NGAUSS CALCOLO COORDINATE E PESO DEL PUNTO DI INTEGRAZIONE CALCOLO FUNZIONI DI FORMA E DERIVATE CALCOLO JACOBIANO E TRASFORMAZIONE DERIVATE FUNZIONI DI FORMA CALL DAT2D(NGAUSS,IPT,LPT,CSI,ETA,PESO) CALL FORM2D(CSI,ETA,8,NCONR,ENNE,ICO) CALL JAC2D(ENNE,NCONR,XYl,CPI,DA,BETA) L=1 COSTRUZIONE MATRICE B DO 33 I=1,NCONR*2 IF( (I/2)*2 .NE. I) THEN RN(1,I)=ENNE(2,L) RN(3,I)=ENNE(3,L) ELSE RN(2,I)=ENNE(3,L) RN(3,I)=ENNE(2,L) L=L+1 ENDIF CONTINUE CALCOLO PESO DI INTEGRAZIONE W=PESO*THC*DA AREA=AREA+W/THC DO 14 I=1,3 DO 14 K=1,3 D(I,K)=E(I,K)*W PRODOTTO CALL PRODOTTO CALL CONTINUE RETURN END Btras * E * dV MATMUL(RN,3,3,NCONR*2,D,3,RNE,16,3,1,0) IN ACCUMULO (Btras * E * dV) * B MATMLA(RNE,16,NCONR*2,3,RN,3,ELMAT,16,NCONR*2,0,0)
C C C C C C C C C C C C C C C C
C C C C C C
C C
33 C C
14 C C C 10
11
060eliso.doc
C C c
SUBROUTINE STRQ8D2(XYL,SOL,ICO,E,NGAUSS) CALCOLO DEGLI SFORZI IN UN ELEMENTO ISOPARAMETRICO 2D IMPLICIT REAL*8 (A-H,O-Z) DIMENSION SO(16),STRESS(3),EPS(3) DIMENSION ICO(1),SOL(*),E(3,3),CPI(2) DIMENSION XYL(2,8),ENNE(3,8),RN(3,16) XYL(2xNODI) SO(2x16) ICO(NODI) E(3x3) NGAUSS NCONR ENNE(3x8) RN(3x16) CPI(2) DO 456 L=1,3 DO 456 K=1,16 RN(L,K)=0 DOPPIO CICLO SUI PUNTI DI CALCOLO DEGLI SFORZI DO 10 IPT=1,NGAUSS DO 10 LPT=1,NGAUSS CALCOLO COORDINATE E PESO DEL PUNTO DI INTEGRAZIONE CALCOLO FUNZIONI DI FORMA E DERIVATE CALCOLO JACOBIANO E TRASFORMAZIONE DERIVATE FUNZIONI DI FORMA CALL DAT2D(NGAUSS,IPT,LPT,CSI,ETA,PESO) CALL FORM2D(CSI,ETA,8,NCONR,ENNE,ICO(2)) CALL JAC2D(ENNE,NCONR,XYL,CPI,DA,BETA) COSTRUZIONE MATRICE B L=1 DO 33 I=1,NCONR*2 IF( (I/2)*2 .NE. I) THEN RN(1,I)=ENNE(2,L) RN(3,I)=ENNE(3,L) ELSE RN(2,I)=ENNE(3,L) RN(3,I)=ENNE(2,L) L=L+1 ENDIF CONTINUE PRODOTTO CALL PRODOTTO CALL Epsilon = Btras * U MATMUL(RN,3,3,NCONR*2,SOL,16,EPS,3,1,0,0) Sigma = E * Epsilon MATMUL(E,3,3,3,EPS,3,STRESS,3,1,0,0) MATRICE DELLE COORDINATE NODALI DELL'ELEMENTO MATRICE DELLE SOLUZIONI AI NODI DELL'ELEMENTO VETTORE DI NUMERAZIONE DELL'ELEMENTO MATRICE ELASTICA DEL MATERIALE (UNIFORME) N. DEI PUNTI DI INTEGRAZIONE UGUALE PER LE DUE DIREZIONI NUMERO DI NODI EFFETTIVI DELL'ELEMENTO MATRICE FUNZIONI DI FORMA E DERIVATE MATRICE B COORDINATE FISICHE DEI PUNTI DI INTEGRAZIONE
C C C C C C C C C C C C 456 C C C C C C
C C
33 C C C C C 10
STAMPA DEI RISULTATI WRITE(22,(I4,5E12.5))ICO(1),CPI,EPS WRITE(22, (28X,3E12.5/))STRESS CONTINUE WRITE(22,*) RETURN END
12
060eliso.doc
C ************************* DAT2D ********************* SUBROUTINE DAT2D(ngauss,IPA,IPB,CSI,ETA,PESO) C C CALCOLA LE COORD. ADIMENSIONALI DEI PUNTI DI INTEGRAZIONE C ED I RELATIVI "PESI" PER ELEMENTI BIDIMENSIONALI C c ngauss oRDINE DI INTEGRAZIONE c ipa INDICE DEL PUNTO NELLA DIREZIONE x-LOCALE c iPB iNDICE DEL PUNTO NELLA DIREZIONE y-LOCALE c CSI COORDINATA x-LOCALE DEL puntO c eta COORDINATA y-LOCALE c pESO PESo DEl PUNTo DI INTEGRAZIONE C IMPLICIT REAL*8 (A-H,O-Z) DIMENSION X(21),W(21) DATA X/ * 0.D0, * -.5773502691896D0,.5773502691896D0, * -.7745966692415D0,0.D0,.7745966692415D0, * -.8611363115941D0,-.3399810435849D0,.3399810435849D0, * .8611363115941D0, * -.90617985D0,-.53846931D0,0.D0,.53846931D0,.90617985D0/ DATA W/ * 2.D0, * 1.D0,1.D0, *.5555555555556D0,.8888888888889D0,.5555555555556D0, *.3478548451375D0,.6521451548625D0,.6521451548625D0, *.3478548451375D0, *.23692689D0,.47862867D0,.568888888889D0,.47862867D0,.23692689D0/ DATA MAXPUN/5/ c iF( NGAUSS.GT.maxpun) THEN print*,' non definiti dati per n. punti superiore a 5' nga=5 else nga=ngauss endif K1=((Nga-1)*nga/2 ETA=x(K1+ipa) csi =x(K1+IPB) PESO=W(K1+IPA)*W(K1+IPB) RETURN END
13
060eliso.doc
C ************************* FORM2D ********************** SUBROUTINE FORM2D(P,Q,NIN,NOU,ENNE,ICON) IMPLICIT REAL*8 (A-H,O-Z) DIMENSION ENNE(3,1),ICON(1) C C QUESTA SUBROUTINE COSTRUISCE LE FUNZIONI DI FORMA E LE LORO C DERIVATE NEL RIFERIMENTO LOCALE PER L'ELEMENTO PIANO C C P VALORE DELLA COORDINATA X-LOCALE DEL PUNTO DI INTEG C Q Y-LOCALE DEL PUNTO DI INTEG c nin nUMERO DI NODI DI DEFINIZIONE DELL'ELEMENTO C nou EFFETTIVI DELL'ELEMENTO c icon VETTORE DI CONNESSIONE DELL'ELEMENTO C enne mATRICE DELLE FUNZIONI DI FORMA C PRIMA RIGA - FUNZIONI DI FORMA c sECONDA RIGA- DERIVATE RISPETTO ALLA DIREZIONE X-LOC C TERZA RIGA - deRIVATA RISPETTO ALLA DIREZIONE y-LOC C C TERMINI RELATIVI ALL'ELEMENTO LINEARE C C FUNZIONI DI FORMA ENNE(1,1)= .25 * (1.D0+P) * (1.D0+Q) ENNE(1,2)= .25 * (1.D0-P) * (1.D0+Q) ENNE(1,3)= .25 * (1.D0-P) * (1.D0-Q) ENNE(1,4)= .25 * (1.D0+P) * (1.D0-Q) C C DERIVATE DIREZIONE X-LOCALE ENNE(2,1)= .25 * (1.D0+Q) ENNE(2,2)=-.25 * (1.D0+Q) ENNE(2,3)=-.25 * (1.D0-Q) ENNE(2,4)= .25 * (1.D0-Q) C C DERIVATE DIREZIONE Y-LOCALE ENNE(3,1)= .25 * (1.D0+P) ENNE(3,2)= .25 * (1.D0-P) ENNE(3,3)=-.25 * (1.D0-P) ENNE(3,4)=-.25 * (1.D0+P) C NOU=NIN IF(NIN.EQ.4)RETURN C C CASO DI ELEMENTO PARABOLICO P2=P*P Q2=Q*Q P3=P2*P Q3=Q2*Q IF(NIN.NE.8) GOTO 520 C C FUNZIONI DI FORMA DEI NODI CENTRALI ENNE(1,5)= .5 * (1.D0-P2) * (1.D0+Q ) ENNE(1,6)= .5 * (1.D0-P ) * (1.D0-Q2) ENNE(1,7)= .5 * (1.D0-P2) * (1.D0-Q ) ENNE(1,8)= .5 * (1.D0+P ) * (1.D0-Q2) C C DERIVATE DELLE FUNZIONI DI FORMA NODI CENTRALI
14
060eliso.doc
ENNE(2,5)=- P ENNE(2,6)=-.5 ENNE(2,7)=- P ENNE(2,8)= .5 C ENNE(3,5)= .5 ENNE(3,6)=- Q ENNE(3,7)=-.5 ENNE(3,8)=- Q C C
* * * * * * * *
(1.D0+Q ) (1.D0-Q2) (1.D0-Q ) (1.D0-Q2) (1.D0-P2) (1.D0-P ) (1.D0-P2) (1.D0+P )
20 C C C
ELIMINAZIONE DEI NODI MANCANTI (ICON(I)=0) DO 20 I=5,8 IF (ICON(I).EQ.0) THEN ENNE(1,I)=0.D0 ENNE(2,I)=0.D0 ENNE(3,I)=0.D0 ENDIF CONTINUE AGGIUNTA DEL TERMINE PARABOLICO A QUELLO LINEARE DO 30 I=1,3 ENNE(I,1)=ENNE(I,1)-.5*(ENNE(I,8)+ENNE(I,5)) ENNE(I,2)=ENNE(I,2)-.5*(ENNE(I,5)+ENNE(I,6)) ENNE(I,3)=ENNE(I,3)-.5*(ENNE(I,6)+ENNE(I,7)) ENNE(I,4)=ENNE(I,4)-.5*(ENNE(I,7)+ENNE(I,8)) CONTINUE LINF=5 COMPATTAZIONE DELLA MATRICE FUNZIONI DI FORMA
30 60 C C C
IPOS=LINF LSUP=NIN NOU=NIN DO 40 I=LINF,LSUP IF(ICON(I).ne.0) then ENNE(1,IPOS)=ENNE(1,I) ENNE(2,IPOS)=ENNE(2,I) ENNE(3,IPOS)=ENNE(3,I) IPOS=IPOS+1 else NOU=NOU-1 endif 40 CONTINUE RETURN 520 WRITE(*,620) 620 FORMAT(' *** AVVISO (FORM2D): NUMERO DI NODI ERRATO:', 1 I4,' ANZICH' 4-8 ***'/) STOP END
15
060eliso.doc
C ************************* JAC2D ********************* SUBROUTINE JAC2D(ENNE,NNOD,XN,CPI,DA) IMPLICIT REAL*8 (A-H,O-Z) DIMENSION ENNE(3,1),XN(2,NNOD),RJ(2,2),RJM1(2,2),F(2),CPI(2) C C QUESTA SUBROUTINE CALCOLA LO JACOBIANO (RJ) NEL PUNTO DI C INTEGRAZIONE, IL SUO INVERSO (RJM1), L'ELEMENTO D'AREA (DA), c EFFETTUA LA TRASFORMAZIONE DELLE DERIVATE DELLE FUNZIONI C DI FORMA NEL RIFERIMENTO GLOBALE C C C calcolo dello jacobiano DN*x C DO 10 I=1,2 DO 10 K=1,2 RJ(I,K)=0.D0 DO 10 N=1,NNOD RJ(I,K)=RJ(I,K)+ENNE(K+1,N)*XN(I,N) 10 CONTINUE C c CALCOLO DELLE COORDINATE FISICHE DEL PUNTO DI INTEGRAZIONE c DO 30 I=1,2 CPI(I)=0.D0 DO 30 N=1,NNOD CPI(I)=CPI(I)+ENNE(1,N)*XN(I,N) 30 CONTINUE C C inversione dello jacobiano C DA=RJ(1,1)*RJ(2,2)-RJ(1,2)*RJ(2,1) C C INSERIRE TEST SUL VALORE DI DA C RJM1(1,1)= RJ(2,2)/DA RJM1(1,2)=-RJ(1,2)/DA RJM1(2,1)=-RJ(2,1)/DA RJM1(2,2)= RJ(1,1)/DA C c trasformazione delle derivate c DO 40 N=1,NNOD DO 20 I=1,2 F(I)=0.D0 DO 20 K=1,2 F(I)=F(I)+RJM1(K,I)*ENNE(K+1,N) 20 CONTINUE ENNE(2,N)=F(1) ENNE(3,N)=F(2) 40 CONTINUE RETURN END
16
060eliso.doc
Esercizi: Modificare la programmazione dei sottoprogrammi presentati per tenere conto di: spessore variabile stato di pre-sforzo o pretensione nell'elemento estendere lo sviluppo dell'elemento di membrana per il suo utilizzo in modelli tridimensionali ottimizzare la programmazione per ridurre le operazioni richieste per la costruzione della matrice
Scelta delle funzioni di forma
La scelta di funzioni di forma di tipo Serendipity, che facciano cio uso di nodi posti sulle linee di contorno, alternativo a quelle Lagrangiane (in figura il confronto nel caso bidimensionale di elementi a spostamento quadratico e cubico).
Nodi elementi tipo Serendipity Nodi aggiuntivi per elementi Lagrangiani
E' evidente che gli elementi Lagrangiani sono caratterizzati da uno sviluppo pi completo del campo di spostamenti; possiamo evidenziare sul triangolo di Pascal/Tartaglia i termini utilizzati, a parit di topologia dell'elemento, dalle due famiglie. Con la linea continua sono contornati i termini delle funzioni Serendipity, con quella tratteggiata i termini aggiuntivi delle funzioni Lagrangiane.
Termini Lineari Termini Quadratici Termini Cubici Termini Quartici Termini Quintici Termini Sestici 4 ..... ..... 3 3 32
2
1 2
2 2
Elementi Lineari 2 2 3 32 ..... .....
3
Elementi Quadratici Elementi Cubici 4
3 3
Le considerazioni finali possono essere brevemente sintetizzate in una tabella di pros e contras:
17
060eliso.doc
Pros
Serendipity Pi semplici Poco sensibili alle distorsioni
Contras
Meno precisi
Lagrangiani Pi precisi: l'elemento a 9 nodi, anche se non rettangolare purch con i lati diritti e i nodi sono nel mezzo dei lati, rappresenta esattamente lo stato di flessione pura (l'elemento a 8 nodi no) Sensibili alla posizione dei nodi centrali Elementi spesso non gestiti dai progrmmi di pre- post- elaborazione
Elemento Triangolale Isoparametrico Lineare-Parabolico
Nell'affrontare la formulazione di elementi triangolari mediante l'impiego delle coordinate d'area come funzioni di interpolazione, ci siamo limitati al caso di un elemento a lati diritti. Mediante l'approccio parametrico possiamo ora rimuovere questa restrizione. Consideriamo triangolo rettangolo isoscele definito in un sistema di riferimento elemento che abbia origine nel vertice con angolo interno retto e assi allineati con i due cateti come rappresentato in figura:
3
3 Lato 3 y 6 Lato 2 A2 5 A1 A3 1 Lato 1 2
Lato 2
6 A2 A1 A3 4 Lato 1 x 5
Lato 3
1 4
Mediante interpolazione della geometria possiamo mappare un generico elemento triangolare con sviluppo quadratico dello spostamento in questo elemento normalizzato. Potremo cio definire le tre coordinate d'area:
1 =
A1 A
2 =
A2 A
3 =
A3 A
e scrivere la forma interpolatoria della geometria a partire dallo sviluppo quadratico:
2 2 s = a 1 1 + a 22 2 + a 3 3 + a 4 1 2 + a 5 2 3 + a 6 1 3
se si organizzano le coordinate dei sei nodi in un vettore
[ X] = [ x1 � x 6 y1 � y 6 ]T
l'operatore di interpolazione avr la stessa struttura di quello normalmente utilizzato per gli spostamenti:
dove le funzioni di forma, individuate imponendo la continuit degli spostamenti ai nodi, sono ancora: 18
xU R = [ N ]{X} = N S Ty V W LN 0 OP [N ] = M N0 NQ
i i i
� N 6 {X}
060eliso.doc
N 1 = 1 ( 2 1 1) N 2 = 2 ( 2 2 1) N 3 = 3 ( 2 3 1)
N 4 = 4 1 2 N5 = 423 N 6 = 4 31
Poich le tre coordinate d'area sono ridondanti, e' possibile sfruttare l'equazione di normalizzazione per eliminarne una. Arbitrariamente esprimiamo la terza coordinata d'area in funzione delle prime due. In questo modo le funzioni di interpolazione diventano:
1 = r
2 = s
3 = 1 r s
N1 = r ( 2 r 1)
N 4 = 4 rs
N 2 = s( 2 s 1) N 3 = (1 r s)( 2(1 r s) 1)
N 5 = 4s(1 r s) N 6 = 4 r (1 r s)
Alle derivate rispetto alle coordinate adimensionali si perviene direttamente da queste espressioni
N1/ r = 4 r 1 N 2/ r = 0 N 3/ r = 4 ( s + r ) 3 N 4 / r = 4s N 5/ r = 4 s N 6/ r = 4(1 2 r s)
N1/ s = 0 N 2/s = 4s 1 N 3/ s = 4 ( s + r ) 3 N 4/s = 4 r N 5/ s = 4(1 r 2s) N 6/ s = 4 r
LM x [ J ] = M r y MN s
i/ x i/ y
Siamo quindi in grado di calcolare lo Jacobiano della trasformazione:
y r = N1/ r � N 6/ r y N1/ s � N 6/ s s
OP PP LMN Q
OP LM x� Q MMNx
OP �P y P Q
y1
6
Note le espressioni delle derivate nel dominio adimensionale, quelle nel dominio fisico sono determinabili mediante la semplice moltiplicazione dello Jacobiano inverso:
Le matrici di rigidezza, di massa e i vettori di carichi nodali possono essere ora calcolati mediante formule di integrazione specifiche per il dominio triangolare. FORMULE PER L"INTEGRAZIONE SU TRIANGOLI E' anche possibile lasciare le funzioni di interpolazione espresse in termini di coordinate d'area ricorrendo alla definizione della metrica locale mediante la differenziazione parziale delle stesse:
N U R RN U = J S S V W TN W T N V
1
i/ r i/s
N i N i 1 N i 2 N i 3 = + + = r 1 r 2 r 3 r 1 =1 r 1 =0 s 2 =0 r 2 =1 s 3 = 1 r 3 = 1 s
ma poich per la definizione del legame tra le coordinate d'area e quelle locali si ha che
19
060eliso.doc
si ottengono le due relazioni seguenti
N i N i N i = r 1 3 N i N i N i = s 2 3
Ricordando le derivate delle funzioni di interpolazione rispetto alle coordinate d'area
N 1/ 1 = 4 1 1 N 2 / 1 = 0 N 3/ 1 = 0 N 4 / 1 = 4 2 N 5/ 1 = 0 N 6/ 1 = 4 3 N1/ r = N1/ 1 N1/ 3 = 4 1 1 0 = 4 r 1 N1/ s = N1/ 2 N1/ 3 = 0 0 = 0 N 2 / r = N 2 / 1 N 2 / 3 = 0 0 = 0
N 1/ 2 = 0 N 2 / 2 = 4 2 1 N 3/ 2 = 0 N 4 / 2 = 4 1 N 5/ 2 = 4 3 N 6/ 2 = 0
N 1/ 3 = 0 N 2 / 3 = 0 N 3/ 3 = 4 3 1 N 4 / 3 = 0 N 5/ 3 = 4 3 N 6/ 3 = 4 1
si ottiene l'espressione delle derivate delle funzioni di interpolazione nel dominio adimensionale:
N 2 / s = N 2 / 2 N 2 / 3 = 4 2 1 0 = 4s 1 N 3/ r = N 3/ 1 N 3/ 3 = 0 ( 4 3 1) = 4 ( s + r ) 3 N 3/ s = N 3/ 2 N 3/ 3 = 0 ( 4 3 1) = 4( s + r ) 3 N 4 / r = N 4 / 1 N 4 / 3 = 4 2 0 = 4 s N 4 / s = N 4 / 2 N 4 / 3 = 4 1 0 = 4 r N 5/ r = N 5/ 1 N 5/ 3 = 0 4 2 = 4s N 5/ s = N 5/ 2 N 5/ 3 = 4 3 4 2 = 4(1 r 2s) N 6/ r = N 6/ 1 N 6/ 3 = 4 3 4 1 = 4(1 2 r s) N 6 / s = N 6 / 2 N 6 / 3 = 0 4 1 = 4 r
che coincidono ovviamente con quelle prima viste.
- CONSIDERAZIONI E CONFRONTI - MATRICI DI MASSA CONSISTENTI - CARICHI CONCENTRATI - ELEMENTO ISOPARAMETRICO SOLIDO
PARABOLICO/LINEARE
20
060eliso.doc
Considerazioni
Una caratteristica della formulazione isoparametrica risiede nel fatto che le matrici dell'elemento possono essere costruite direttamente nel sistema di riferimento globale: per un elemento solido, per esempio, non necessario effettuare trasformazioni tra il riferimento locale e quello generale. Questo perch la mappatura tra dominio fisico e dominio adimensionale contiene automaticamente questo passaggio. Lo stesso discorso vale anche per un elemento bidimensionale definito in un modello anch'esso a due dimensioni . Le trasformazioni si rendono per necessarie se si desidera disporre di risultati in termini locali o tenere conto di fattori locali la trasformazione obbligatoria, per esempio nel caso di laminati in composito per i quali gli sforzi e le deformazioni assumono un significato preciso solo in tale riferimento. Nel caso dell'elemento di membrana (bidimensionale) se questi viene definito in uno spazio tridimensionale occorre individuare un riferimento locale, avente il terzo asse normale al piano medio dell'elemento; questo perch la costruzione delle matrici e dei vettori ad esso associati, data la struttura intrinsecamente bidimensionale , pu avvenire solo in quel tipo di spazio. Risulta quindi necessario operare le trasformazione dei diversi termini (rigidezze per l'assemblaggio, carichi, ... ). Possiamo notare come la formulazione sia del tutto generale e non soffra di particolari restrizioni: la definizione di problemi ridotti, come quelli del caso bidimensionale esaminato, infatti facilmente derivata dalle formule complete con la semplice eliminazione della/delle coordinate eccedenti.
Con questa formulazione inoltre possibile realizzare gli elementi in modo che alcuni lati possano descrivere lo spostamento con un ordine differente rispetto agli altri ottenendo elementi degradati; per esempio possibile definire come rettilineo un lato di un elemento parabolico per realizzare la transizione da una zona ad elementi bilineari ad elementi di ordine superiore. possibile fare degenerare l'elemento quadrangolare in un triangolo sovrapponendo i nodi di due angoli adiacenti; INSERIRE SVILUPPO DELL'ELEMENTO TRIANGOLARE DEGENERATO Questa procedura deve per ritenersi soltanto un ripiego cui ricorrere in caso di mancanza di un elemento triangolare: la qualit dell'elemento cosi ottenuto non pu essere ritenuta soddisfacente nel caso parabolico, mentre risulta essere meno efficiente nel caso di un elemento a stato di sforzo costante. pertanto opportuno ricorrere a questa possibilit limitatamente a zone del modello nelle quali non sia critica la corretta determinazione dello sforzo, tipicamente aree di diradamento dello schema.
Validit
La validit degli elementi di tipo parametrico, ed in particolare degli isoparametrici, testimoniata dalla popolarit di cui godono, tanto da essere presenti nella maggioranza dei codici di calcolo e questo sia per quanto riguarda applicazioni strutturali che non. Una simile diffusione dovuta essenzialmente alla semplicit della programmazione ed alla generalit della formulazione che permette di realizzare intere famiglie di elementi tutte basate sullo stesso nucleo di sottoprogrammi. La struttura di implementazione dell'elemento inoltre molto flessibile, per esempio, come accennato, nel caso bidimensionale possibile modellare spessori variabili semplicemente interpolando, sempre con le funzioni di forma, gli spessori nodali. 21
060eliso.doc
Esempi di convergenza di elementi di ordine differente
Continuit
Negli sviluppi esaminati stata affrontata la formulazione di elementi di tipo C 0 , cio elementi in grado di garantire la continuit inter-elementare della funzione spostamento; abbastanza semplice verificare che la formulazione garantisce il rispetto di queste condizioni. I requisiti di continuit riguardano: - la continuit geometrica, vale a dire che non deve esserci discontinuit nei volumi definiti da due elementi adiacenti compatibili; - la continuit della funzione di campo, lo spostamento nel caso strutturale
A 1 B C
Consideriamo i due elementi parabolici rappresentati in figura e aventi il lato ABC in comune; su questo lato la tangente espressa in entrambi gli elementi uguale in quanto dipende solo dalla geometria definita dai nodi A,B e C; analogamente le funzioni di forma sul lato per i due elementi sono uguali, cosi come la funzione spostamento che essendo interpolata con funzioni che sul lato in questione sono identiche continua passando da un elemento all'altro. L'univocit della mappatura garantisce la continuit delle funzioni spostamento al contorno degli elementi una volta che questa lo sia nel dominio fisico; inoltre se la definizione delle funzioni di forma sono tali da garantire la continuit nel dominio adimensionale, i requisiti di continuit saranno pure soddisfatti nel dominio fisico.
Ottimizzazione
Vista l'importanza dell'efficienza dell'elemento finito opportuno cercare di ridurre il numero di operazioni necessarie per la costruzione delle matrici associate all'elemento: matrici di rigidezza e massa, carichi nodali.... - Simmetrizzazione delle matrici avendo calcolato solo una parte dei coefficienti - Prodotti espliciti per evitare il calcolo di termini nulli
Effetti della distorsione
1/3
Per ottenere un buon funzionamento dell'elemento opportuno che vengano soddisfatte alcune specifiche oltre a quelle di univocit della trasformazione cui si accennato all'inizio della trattazione. In particolare gli angoli interni ad elementi quadrangolari non potranno essere superiori a 180 gradi n minori di 0; 22
060eliso.doc
questo requisito si spiega con la necessit di evitare l'incrociarsi delle linee coordinate locali a valore costante. Per quanto concerne invece il posizionamento del nodo intermedio vi una certa libert d'azione in quanto i risultati sono praticamente insensibili alle variazioni di questo parametro a patto che si rimanga entro il terzo centrale del lato. Per verificare una eventuale eccessiva distorsione dell'elemento possibile ricorrere ad alcune tecniche empiriche come controllare che un nodo medio sia "abbastanza vicino" al punto medio dei nodi d'angolo dello stesso lato. Un elemento pi oggettivo rappresentato, dato il suo significato fisico, dal determinante dello Jacobiano della mappatura. possibile verificare, attraverso questo parametro valutato in alcuni punti dell'elemento, se manchi la completa biunivocit del legame tra il riferimento fisico e quello adimensionale: infatti il determinante dello Jacobiano non pu annullarsi all'interno del dominio, ma essendo questa condizione difficilmente riscontrabile, occorrer accontentarsi di verificare che esso non cambi segno all'interno dell'elemento valutando il suo valore in una griglia regolare (in particolare per sistemi di riferimento locale e generale destrorsi deve mantenersi positivo). Sfruttando questa propriet per possibile individuare un parametro oggettivo che ci permette di valutare il grado di distorsione geometrica che caratterizza un elemento. Consideriamo la relazione esistente tra elementi di volume infinitesimi nel dominio fisico e adimensionale:
dVfis = det[J] dVadim
che pu essere scritta come
det[ J ] =
dV fis
dVa dim
Se l'elemento regolare (un quadrato o un cubo, un rettangolo o un parallelogramma) lo Jacobiano costante. Se invece l'elemento distorto, come nel caso di un quadrangolo generico, esso variabile da punto a punto: la differenza tra i valori massimo e minimo indicativa del livello di distorsione. Questo parametro non per in grado di identificare un eccessivo stiramento o scorrimento, che possono caratterizzare un rettangolo molto allungato o un parallelogramma molto schiacciato. Si tratta di una distorsione individuabile attraverso l'esame dei rapporti tra i diversi termini diagonali della matrice Jacobiano: un valore unitario starebbe ad indicare un elemento quadrato, mentre valori diversi starebbero ad indicare un elemento allungato in una delle due direzioni. Il funzionamento ottimale dell'elemento isoparametrico si ha per rapporti tra i lati dell'ordine di 1 a 2; pero possibile arrivare senza grossi problemi a rapporti dell'ordine di 1/10, ogni ulteriore stiramento dell'elemento deve essere convalidato da prove eseguite appositamente. Se invece si analizzano i rapporti tra i termini extradiagonali e quelli diagonali, si ha un ulteriore indicazione della distorsione della metrica: il valore di questo rapporto deve essere piccolo, in caso contrario si avrebbe un gradiente del rapporto metrico muovendosi nella direzione di interesse, per esempio se x / s non nullo, l'elemento di coordinata curvilinea dx cambia di lunghezza quando ci si muove nella direzione locale s. Poich la valutazione di tutti i termini necessari per l'elaborazione di un elemento avviene nei punti di integrazione, anche questi discorsi andranno riferiti ai ivi valori calcolati. Elemento monodimensionale - spostamento nodo centrale Consideriamo un elemento monodimensionale parabolico o un lato di un elemento bi- tri-dimensionale una volta che siano stati posti a valore unitario le altre coordinate adimensionali. Siano x1, x2 le coordinate dei due nodi esterni. Esprimiamo invece la coordinata x3 del terzo nodo mediante una funzione delle coordinate dei primi due nodi e di un parametro alfa in modo che per i valori 0, 1 ed 1/2 di tale parametro il nodo centrale risulti essere posizionato in corrispondenza del primo nodo, secondo nodo e del punto medio dell'elemento rispettivamente. Sviluppo interpolazione della geometria: mancanza di univocit della trasformazione 23
060eliso.doc
Ascissa Normalizzata
Azzeramento dello Jacobiano della trasformazione
Ascissa Normalizzata
Si osserva che per =0.75, cio quando il nodo centrale posto a 3/4 dell'elemento (ma la stessa cosa, con le pendenze delle curve cambiate di segno, avviene quando il nodo posto a 1/4 del lato e si ha =0.25) lo Jacobiano della deformazione si azzera esattamente all'estremit destra dell'elemento. Conseguenza di questo fatto la mancanza di definizione della trasformazione all'estremit dell'elemento; il suo effetto la singolarit della deformazione, e quindi dello sforzo. Se vero che, normalmente, lo sforzo non viene valutato in corrispondenza dei nodi, per motivi di precisione, pur vero che la funzione di deformazione risente comunque della presenza vicina di una singolarit e il lavoro di deformazione ne risulta affetto. Questa situazione da evitare assolutamente in condizioni operative normali, pu essere sfruttata per migliorare le caratteristiche di convergenza della soluzione in problemi di meccanica della frattura affrontati con modelli lineari: una adeguata rappresentazione dello stato di singolarit che caratterizza lo sforzo all'apice di una cricca pu essere ottenuta anche con elementi di dimensioni non particolarmente piccole, in rapporto alla dimensione della cricca stessa. Si vuole ancora sottolineare il fatto che si tratta di una situazione assolutamente atipica. % nodcen2.m % effetto della posizione del nodo centrale sulla trasformazione % di coordinate per un elemento monodimensionale isoparametrico 24
060eliso.doc
% clear x1=-1; x2=1; valfa=[.5,.6,.7,.8,.9]; dim=size(valfa); na=dim(2); clg %subplot(211) for ia=1:na alfa=valfa(ia); x3=(x2-x1)*alfa+x1; csi=-1; dcsi=1/50; for i=1:101 r(i)=csi; % calcolo geometria x(i,ia)=x1*(.5*(csi^2-csi)+(1-csi^2)*(1-alfa))+x2*(.5*(csi^2+csi)+(1-csi^2)*alfa); % e jacobiano %j(i,ia)=-4*alfa*csi+2*csi+1; j(i,ia)=x1*.5*(2*csi-1)+x2*.5*(2*csi+1)+x3*(-2*csi); csi=csi+dcsi; end end axis('square'); plot(r,x(:,1),r,x(:,2),r,x(:,3),r,x(:,4),r,x(:,5)); title('Interpolazione della coordinata x') for ia=1:na ss=sprintf(' a=%g',valfa(na-ia+1)); text(0.1,0+(ia-1)*.2,ss); end pause % disegno dello jacobiano axis('square'); plot(r,j(:,1),r,j(:,2),r,j(:,3),r,j(:,4),r,j(:,5)); hold on zz=zeros(101,1); plot(r,zz,'--'); title('Jacobiano della trasformazion); for ia=1:na ss=sprintf(' a=%g',valfa(na-ia+1)); text(1.05,-.7+(ia-1)*.4,ss); end hold off
25
060eliso.doc
Elemento membrana bidimensionale a) b) Spostamento nodo centrale Distorsione della geometria Concavit Angolo interno < = > 180 gradi
26
060eliso.doc
Ordine di integrazione
L'utilizzo di una procedura numerica per l'integrazione della matrice di rigidezza introduce una ulteriore approssimazione che deve essere contenuta entro limiti sicuramente accettabili soprattutto in rapporto al costo necessario per ottenere un certo livello di precisione. La scelta dell'ordine di integrazione da utilizzare nel calcolo delle matrice dell'elemento riveste una certa rilevanza in quanto pu influire sulla possibilit di raggiungere la convergenza della soluzione e sulla velocit di tale convergenza. Inoltre tale scelta ha un peso che pu risultare non trascurabile in termini di tempi di elaborazione necessari per la costruzione delle matrici di rigidezza senza avere alcuna contropartita in termini di aumento della precisione dei risultati: esso infatti proporzionale al numero totale di punti di integrazione che cresce, in funzione del numero di punti della formula utilizzata, con legge quadratica nel caso di elementi bidimensionali e cubica per quelli solidi. Viene definita come "integrazione completa" quella che porta alla valutazione esatta dei termini integrali ed aumentare la precisione della formula di integrazione del tutto inutile in quanto i risultati non cambiano ed anzi dannoso perch il tempo necessario per concludere l'operazione cresce notevolmente. per vero che gli errori commessi con il rilassamento dell'integrazione, cio con l'utilizzo di una formula di integrazione di ordine inferiore a quello necessario per la completezza dell'operazione, possono addirittura risultare convenienti in quanto la sottostima che si ottiene delle rigidezze, tende a contrastare la caratteristica, tipica dei modelli discreti, di una maggiore rigidit rispetto alla struttura reale. Quindi introducendo intenzionalmente un errore nella valutazione della rigidezza si otterrebbe un duplice vantaggio: contenimento dei tempi di elaborazione e miglioramento nella precisione del risultato finale (non della valutazione dell'integrale). Succede per che, esagerando in questa direzione, una eccessiva limitazione della precisione dell'integrazione, pu portare ad una valutazione completamente errata delle matrici con un errore, di sottostima, che pu portare fino alla singolarit della matrice di rigidezza. Questo effetto dovuto al fatto che un numero limitato di punti non riesce a recuperare informazioni da tutti i modi di deformazione ammessi dall'elemento, in particolare quelli descritti da polinomi di ordine superiore: il caso pi semplice quello dell'elemento bilineare nel modo di flessione nel piano descritto in figura:
=0
Si pu dire che l'energia di deformazione di questi modi venga ad essere valutata in corrispondenza o nelle immediate vicinanze dei nodi del modo stesso con una conseguente sottostima che in casi particolari come quello ora esaminato pu arrivare alla perdita completa del contributo. Nel caso monodimensionale immediato verificare quanto detto: le configurazioni possibili di spostamento ammesse dall'elemento sono: spostamento uniforme, lineare e parabolico, cui corrispondono derivate nulla, costante e lineare rispettivamente. E' evidente come nel caso della modalit di deformazione pi complessa la derivata, e quindi deformazione e sforzo, risulti essere nulla al centro dell'elemento, cio in corrispondenza del punto di integrazione della formula a un punto. Disegni Questo argomento verr approfondito successivamente. Esiste comunque un limite inferiore al livello di precisione dell'integrazione al disotto del quale non possibile scendere: al ridursi delle dimensioni dell'elemento al suo interno si approssima sempre meglio lo stato di sforzo costante, ne consegue che i termini che compaiono nell'integrale di volume risultano essere tutti costanti; a questo punto la formula deve comunque essere in grado di integrare esattamente il volume dell'elemento. 27
060eliso.doc
L'ordine di integrazione ottimale pu essere deciso con una serie di prove che permettano di bilanciare i pro e i contro. E' per opportuno avere un'idea del fenomeno e cercare di individuare elementi utili per operare una scelta ragionata del numero di punti di integrazione. Poich sappiamo che nel caso monodimensionale le formule di quadratura di Gauss sono caratterizzate da un ordine di esatta integrazione esprimibile in funzione del numero di punti come O(n)=2n-1, possiamo cercare di stabilire a priori il numero di punti necessario per l'integrazione ottimale della matrice di rigidezza. L'integrazione espressa come:
[ K ] = [ B]T [ E ][ B]det J d
ove il volume adimensionale sul quale deve essere eseguita l'operazione; la funzione integranda pertanto costituita da:
f = [ B]T [ E ][ B]det J
Esaminiamo il caso di un elemento monodimensionale a 2 nodi avente caratteristiche di sezione costanti; lo spostamento lineare nell'elemento e i termini che compaiono nella relazione sono tutti costanti: un solo punto sufficiente per la valutazione esatta dell'integrale. Esaminiamo ora il caso di un elemento monodimensionale diritto a 3 nodi, quindi con spostamento parabolico. Se il nodo centrale posto nel punto medio dell'elemento lo Jacobiano risulta costante e nella espressione per il calcolo della matrice di rigidezza compaiono allora solo i termini lineari dovuti all'operatore B; il risultato una funzione di secondo grado nella coordinata adimensionale che sar integrata esattamente utilizzando una formula di Gauss a 2 punti. Si riportano come esempio i risultati del programma per MATLAB param2.m che implementa la costruzione della matrice di rigidezza di un'asta isoparametrica a 3 nodi di lunghezza e rigidezza assiale unitari. La matrice di rigidezza stata calcolata utilizzando 2,3 e 4 punti di integrazione: 2 punti rappresentano il minimo per poter integrare una funzione di secondo grado, quali sono i prodotti Bi Bj, mentre 3 punti garantiscono l'integrazione completa della matrice di massa; sono stati impiegati anche 4 punti per verificare la correttezza dell'integrazione. La geometria dell'elemento sempre rettilinea con nodo intermedio al centro dell'elemento.
N.Punti Integrazione 2 detJ = 0.5000 pesi = 1 1 rigid = 2.3333 0.3333 -2.6667 0.3333 2.3333 -2.6667 -2.6667 -2.6667 5.3333
invjac = punti = massa =
2 -0.5774
0.5774 -0.0556 0.1111 0.1111 0.1111 0.1111 0.4444
0.1111 -0.0556 0.1111
N.Punti Integrazione 3 detJ = 0.5000 pesi = 0.5556 0.8889 rigid = 2.3333 0.3333 -2.6667 0.3333 2.3333 -2.6667
0.5556 -2.6667 -2.6667 5.3333
invjac = punti = massa =
2 -0.7746 0.1333 -0.0333 0.0667
0 -0.0333 0.1333 0.0667
0.7746 0.0667 0.0667 0.5333
N.Punti Integrazione 4 detJ = 0.5000 pesi= 0.3479 0.6521 0.6521 0.3479 rigid = 2.3333 0.3333 0.3333 2.3333 -2.6667 -2.6667
invjac = 2 punti = -0.8611 -0.3400 0.3400 massa = 0.1333 -0.0333 -0.0333 0.1333
0.8611
0.0667 0.0667
28
060eliso.doc
-2.6667
-2.6667
5.3333
0.0667
0.0667
0.5333
I risultati seguenti sono invece ottenuti con il nodo centrale spostato di 1/10 della lunghezza dell'elemento.
N.Punti Integrazione 2 J = J = 0.6155 0.3845 0.3521 3.0282 -3.3803 -2.2535 -3.3803 5.6338 invJ = invJ = massa = 1.6248 2.6006 0.1333 -0.0556 0.1556 -0.0556 0.0889 0.0667 0.1556 0.0667 0.4444
rigid = 1.9014 0.3521 -2.2535
N.Punti Integrazione 3 J = J = J = 0.6549 0.5000 0.3451 0.4159 3.1239 -3.5398 -2.3599 -3.5398 5.8997 invJ = invJ = invJ = 1.5269 2 2.8979 -0.0333 0.0933 0.0400 0.0933 0.0400 0.5333
rigid = 1.9440 0.4159 -2.3599
massa = 0.1733 -0.0333 0.0933
N.Punti Integrazione 4 J = 0.6722 J = 0.5680 J = 0.4320 J = 0.3278 rigid = 1.9459 0.4188 -2.3647 0.4188 3.1282 -3.5470 -2.3647 -3.5470 5.9117
invJ invJ invJ invJ
= = = =
1.4876 1.7606 2.3148 3.0509 -0.0333 0.0933 0.0400 0.0933 0.0400 0.5333
massa = 0.1733 -0.0333 0.0933
Si pu notare come, mentre per la matrice di massa si abbia ancora la completa integrazione con 3 punti, ma con una matrice diversa, l'utilizzo di 4 punti non consente ancora di affermare che l'integrazione della rigidezza sia completa. Per un elemento rettangolare bilineare, avente lati di lunghezza 2a e 2b, abbiamo che le relazioni tra il dominio fisico e quello adimensionale sono dati dalle relazioni x=ar y=bs per cui la matrice Jacobiano risulta costante a 0 [J] = 0 b mentre la matrice B contiene termini lineari in r ed s. Di conseguenza l'integrando risulta di ordine quadratico con termini in r2,rs ed s2. Ne segue che l'utilizzo di una formula di integrazione a 2 punti nelle direzioni r ed s consente l'esatta valutazione dell'integrale. Per un elemento rettangolare bidimensionale con descrizione parabolica dello spostamento avremo elementi di sesto grado in r ed s (le derivate delle funzioni di forma contengono questa volta anche termini quadratici) integrabili correttamente con una formula a 3 punti (3x3). Considerando infine un parallelepipedo rettangolare, quindi un elemento tridimensionale, con descrizione lineare dello spostamento avremo elementi di terzo grado in r ed s integrabili correttamente con una formula a 2 punti 29
060eliso.doc
nelle 3 direzioni (2x2x2) con un totale di 8 valutazioni della funzione. Con elementi parabolici l'ordine sarebbe 5 richiedendo una griglia di (3x3x3) punti per l'integrazione corretta. Se l'integrazione dei termini di rigidezza viene effettuata con queste formule, siamo in presenza di una integrazione completa. Queste considerazioni partono per dal presupposto che la geometria dell'elemento sia regolare, in modo che lo Jacobiano sia costante. Sappiamo invece che la distorsione dell'elemento (sia di forma che di collocazione dei nodi medi) porta ad avere uno Jacobiano dipendente dal punto e quindi variabile nel volume dell'elemento. Nel caso di elementi distorti (lati curvi o nodi centrali spostati dal punto medio del lato) lo Jacobiano risulta essere funzione del posto, in quanto il coefficiente di mappatura dei domini fisico ed adimensionale non pi costante; esso risulta pertanto definiti attraverso una forma polinomiale, ottenuta con le derivate delle funzioni di forma, che compare a numeratore nel termine di volume e a denominatore nella valutazione delle derivate delle funzioni di forma nel dominio fisico. L'influenza di questo elemento non di facile definizione: in parte l'effetto si attenua in quanto gli elementi sono in qualche modo rapportati tra loro; in ogni caso il risultato un'espressione non pi semplicemente polinomiale ma costituita da un rapporto di polinomi. Nel caso in cui l'elemento sia sufficientemente piccolo da soddisfare il requisito di deformazione costante, per cui l'esatta integrazione coincide sostanzialmente con la corretta valutazione del volume dell'elemento, sarebbe possibile utilizzare i valori prima citati. In generale non pu essere stabilito a priori il numero di punti di integrazione ottimale per un certo elemento in quanto pu dipendere, anche in maniera importante, dal particolare schema nonch dal problema in esame; l'esperienza per consente di stabilire alcune regole che sembrano garantire un buon funzionamento dell'elemento nella maggioranza delle situazioni:
Elementi piani - bilineari 2x2 - parabolici 2x2 (integrazione rilassata) 3x3 - cubici 3x3 Elementi solidi - lineari 2x2x2 - parabolici 3x3x3
3x3 3x3 (elementi rettangolari) 4x4 (elementi distorti)
Una correzione a queste regole pu essere apportata ricorrendo ai criteri precedentemente adottati per la verifica della distorsione dell'elemento. Occorre infine ricordare che per un elemento occorre essere in grado di integrare correttamente diversi termini (matrice di rigidezza, di massa, vettori di carico o di deformazione iniziale o pre-sforzo) per i quali possono essere pure diverse le esigenze di precisione dell'integrazione in ragione della struttura specifica; a titolo di esempio si consideri la matrice di massa consistente che con la formulazione parametrica diventa [M] = [N]T [N]det J d
dove possibile apprezzare come, anche per un elemento regolare, l'ordine della funzione da integrare, limitatamente al termine Ni Nj, risulti essere di 2 ordini/gradi pi elevato del corrispondente termine della matrice di rigidezza. possibile un utilizzo generalizzato degli schemi di integrazione precedentemente esaminati in quanto o non compaiono le derivate delle funzioni di forma, come per la matrice di massa, o non compaiono in forma quadratica, come nel caso delle forze nodali dovute ad uno stato di pre-deformazione.
30
060eliso.doc
Modi di meccanismo (Hourglass)
Esiste la possibilit che l'elemento isoparametrico determini la nascita di problemi di instabilit numerica nel modello. Questa instabilit si manifesta come singolarit della matrice di rigidezza in un modello che apparentemente adeguatamente vincolato; il fenomeno pu essere spiegato con l'introduzione di un meccanismo nell'elemento, cio di un modo di deformazione ad energia nulla, ad opera della procedura numerica utilizzata per la costruzione della matrice di rigidezza. Infatti pu succedere che, applicando la tecnica di rilassamento dell'integrazione della rigidezza, una eccessiva limitazione della precisione dell'integrazione, possa portare ad una valutazione completamente errata delle matrici con un errore, di sottostima, che pu portare fino alla singolarit della matrice di rigidezza. Questo effetto dovuto al fatto che un numero limitato di punti non riesce a recuperare informazioni da tutti i modi di deformazione ammessi dall'elemento, in particolare quelli descritti da polinomi di ordine superiore. Nel caso dell'elemento di asta a 3 nodi precedentemente esaminato, questo effetto particolarmente evidente; integrando con un solo punto si ottiene il seguente risultato:
N.Punti Integrazione 1 detJ = 0.5000 J^-1 = b = -0.5000 0.5000 rigid = 1 -1 0 -1 1 0 0 0 0
2 0
pesi =
punti =
La matrice di rigidezza la stessa dell'elemento lineare e il terzo nodo ha rigidezza nulla: l'integrazione, eseguita con un solo punto, non stata in grado di rilevare la presenza dei termini lineari nelle derivate delle funzioni di forma. Un altro esempio particolarmente efficace ed immediato quello dell'elemento bilineare nel modo di flessione nel piano descritto in figura. Nel punto centrale il termine di energia di deformazione, BTEB, =0 risulta essere nullo in quanto sia la deformazione che lo sforzo sono tali al centro dell'elemento. L'energia di deformazione, o il lavoro virtuale, sono valutati solo in alcuni punti del dominio dell'elemento; pu allora succedere che questi si trovino in posizioni nelle quali risulta nulla la deformazione che si ha nell'elemento in seguito all'imposizione di una delle possibili deformate caratteristiche, cio situazioni di deformazione definite da un certo insieme di spostamenti nodali; ne consegue che il contributo alla rigidezza del particolare modo di deformazione nullo. Si pu dire che l'energia di deformazione di questi modi venga ad essere valutata in corrispondenza o nelle immediate vicinanze dei nodi del modo stesso con una conseguente sottostima che in casi particolari come quello ora esaminato pu arrivare alla perdita completa del contributo. ovvio che questo risultato esatto solo se il set di spostamenti definisce un movimento rigido, determiner una instabilit numerica negli altri casi. In figura sono evidenziati i modi di deformazione dell'elemento piano lineare: poich sono 8 i gradi di libert dell'elemento 8 sono pure i modi di deformazione indipendenti che lo caratterizzano. I primi tre modi costituiscono evidentemente uno spostamento rigido caratterizzato da energia di deformazione nulla che risulta essere tale con qualsiasi ordine di integrazione; lo stesso vale per le forme 4,5 e 6 che sono caratterizzate da uno stato di sforzo uniforme. Per gli ultimi due modi che sono di flessione, e quindi caratterizzati da una distribuzione di sforzo lineare di una componente mentre l'altra si mantiene nulla, l'ordine di integrazione diventa importante: in questo caso l'utilizzo di una formula ad 1 31
060eliso.doc
punto comporta la perdita del contributo del modo alla rigidezza dell'elemento in quanto al centro dello stesso tutte le componenti di sforzo sono nulle; trattandosi di deformazioni che si espletano apparentemente senza la generazione di sforzo giustificato l'utilizzo del termine meccanismo per la loro descrizione (in terminologia anglosassone sono anche chiamati hourglass modes). La presenza di questo genere di labilit non legata ad una forma particolare dell'elemento interessato, come quella rettangolare dell'esempio, ma pu venire manifestata da un quadrandolo di forma generica se sottoposto ad un opportuno stato di sollecitazione. Per eliminare questo problema sufficiente utilizzare una formula a 2x2 punti precedentemente suggerita. Elemento Lineare - Gauss 1x1 Elemento Lineare - Gauss 2x2
Anche con l'elemento rettangolare a 8 nodi, integrato con una formula a 2 punti, ci si pu imbattere in un unico modo a energia di deformazione nulla rappresentato in figura. Quest'unico modo potrebbe essere eliminato con l'uso della formula di integrazione a 3 punti che ha come controindicazione il raddoppio dei calcoli necessari per la costruzione della matrice. Elemento Parabolico - Gauss 2x2
Elemento Parabolico
- Gauss 3x3
32
060eliso.doc
Il fenomeno caratteristico dell'elemento ma pu estendersi nello schema qualora non esistano vincoli esterni atti a bloccarli o se questi sono troppo lontani perch siano attivi nei riguardi della labilit:
Zona che risente del vincolo
Zona che non risente del vincolo
Deformata (integrazione 1x1)
Deformata (integrazione 2x2)
Si tratta in questo caso di una labilit particolare legata alla presenza di uno stato di sollecitazione tale da coinvolgere il modo di meccanismo: se tale modo non viene interessato l'elemento funziona regolarmente. Nel caso dell'elemento parabolico, l'esistenza di un possibile meccanismo non particolarmente preoccupante in quanto, contrariamente all'elemento a 4 nodi, due elementi adiacenti non possono evidenziare contemporaneamente il fenomeno; quindi l'eventuale presenza di una instabilit in un elemento non pu trasformarsi in una instabilit di schema. La presenza di una instabilit a livello di schema pu essere valutata confrontando il numero di gradi di libert non vincolati del modello con il numero di valutazioni dell'energia di deformazione (numero di punti di integrazione totale per numero di componenti di sforzo): se quest'ultimo valore eccede quello dei gradi di libert l'instabilit non si pu manifestare.
33
060eliso.doc
Discussione dei diversi effetti
Effetti distorsione e rapporto distorsione/jacobiano |K| A dA 1x1 .19104 4 1 1x1 .21702 6 1.5 1x1 .38086 12 3 1x1 .38209 4 1 1x1 .43405 6 1.5 1x1 .76172 12 3 1x1 .06063 21 5.25 1x1 .0587 5.76 1.440 2x2 .20484 4 1 2x2 .23506 = 1.211 2x2 .41659 = 1.845 2x2 .81944 4 1 2x2 .93063 = 1.211 2x2 .16462 = 1.845 2x2 .14944 20.4 2.639 2x2 .14619 5.867 1.149 3x3 = = = 3x3 .23533 = 1.113 3x3 .41884 = 1.451 3x3 .83205 = = 3x3 .95031 = 1.113 3x3 .17041 = 1.451 3x3 .15360 = 1.872 3x3 .16127 = 1.065 4x4 = = = 4x4 = = 1.069 4x4 .41892 = 1.278 4x4 = = = 4x4 .95048 = 1.069 4x4 .17063 = 1.278 4x4 .15508 = 1.541 4x4 .16232 = 1.035 34 5x5 = = = 5x5 = = 1.047 5x5 .41893 = 1.188 5x5 = = = 5x5 = = 1.047 5x5 .17064 = 1.188 5x5 .15584 = 1.368 5x5 .16243 = .9733 6x6 = = = 6x6 = = 1.034 6x6 = = 1.135 6x6 = = = 6x6 = = 1.034 6x6 = = 1.135 6x6 .15588 = 1.266 6x6 .16244 = .918 7x7 = = = 7x7 = = 1.025 7x7 = = 1.102 7x7 = = = 7x7 = = 1.025 7x7 = = 1.102 7x7 = = 1.201 7x7 = = .881 Norma [K] Area det[J]
|K| A dA
|K| A dA
|K| A dA
|K| A dA
|K| A dA
|K| A dA
|K| A dA
060eliso.doc
Carichi distribuiti
Si consideri il caso di un elemento piano rettangolare a 8 nodi soggetto ad una forza per unit di lunghezza uniformemente distribuita su di un lato (quello a coordinata naturale s unitaria) e valutiamone il vettore dei carichi nodali. Sia L la lunghezza del lato e q l'entit del carico distribuito. Le funzioni di forma sul lato a coordinata si riducono a quelle del caso monodimensionale a 3 nodi. Integrando le tre parabole otteniamo due valori di forza uguali (qL/6) applicate ai nodi di vertice ed una forza di valore (2qL/3) applicata nel nodo centrale del lato. Se anzich considerare un lato di un elemento bidimensionale consideriamo una faccia di un parallelepipedo, di area A, si ottiene un risultato analogo ma meno intuitivo: tutti i nodi di vertice sono caricati in maniera uguale, cos come lo sono i nodi centrali, ma mentre questi sono soggetti a una forza concentrata equiversa con il carico distribuito (qA/3), i nodi di vertice sono caricati con forze dirette in senso opposto (-qA/12). La concentrazione manuale dei carichi distribuito pu quindi portare a problemi di interpretazione dei risultati se non si tiene conto della corretta procedura di concentrazione delle forze (per esempio perch realizzata con un programma che non utilizzi le funzioni peso diverse dalle funzioni di forma dell'elemento).
Carico uniforme su di un elemento quadrangolare Elemento 4 nodi (integrazione 1x1,2x2,3x3) 1 2 3 4 0.0050 0.0050 0.0050 0.0050
Elemento 8 nodi (integrazione 1x1,2x2,3x3) 1x1 -0.1000 -0.1000 -0.1000 -0.1000 0.2000 0.2000 0.2000 0.2000 2x2=3x3 -0.0333 -0.0333 -0.0333 -0.0333 0.1333 0.1333 0.1333 0.1333
1 2 3 4 5 6 7 8
Sforzi vicino a carichi concentrati Sarebbe per questo motivo che alcuni software avrebbero rinunciato all'utilizzo di elementi di ordine elevato in favore dell'impiego di un numero pi elevato di elementi semplici.
35
You might also like
- Matematica vettoriale, matriciale e tensorialeFrom EverandMatematica vettoriale, matriciale e tensorialeRating: 5 out of 5 stars5/5 (1)
- Domini di resistenza in pressoflessione deviata per sezioni in c.a.: procedura parametrica per il tracciamento e confronti con formulazioni semplificateFrom EverandDomini di resistenza in pressoflessione deviata per sezioni in c.a.: procedura parametrica per il tracciamento e confronti con formulazioni semplificateNo ratings yet
- 07 Calcolo Automatico Delle StruttureDocument20 pages07 Calcolo Automatico Delle Strutturedonato770No ratings yet
- Assemblaggio Matrice Di RigidezzaDocument12 pagesAssemblaggio Matrice Di RigidezzaMattia Nistico'No ratings yet
- Il Metodo Degli Elementi FinitiDocument41 pagesIl Metodo Degli Elementi FinitiD RashNo ratings yet
- ESERCITAZIONE Con Confronto Matlab-SAP2000Document130 pagesESERCITAZIONE Con Confronto Matlab-SAP2000Alessandro Cancelli100% (2)
- Introduzione Al Metodo Degli Elementi FinitiDocument22 pagesIntroduzione Al Metodo Degli Elementi FinitiChristos TsaropoulosNo ratings yet
- Analisi Dinamica Con SAp2000Document183 pagesAnalisi Dinamica Con SAp2000carlosgrandeNo ratings yet
- L'Analisi Statica Non Lineare (Push-Over) Delle Strutture in Cemento ArmatoDocument10 pagesL'Analisi Statica Non Lineare (Push-Over) Delle Strutture in Cemento ArmatoginoNo ratings yet
- Verifica Di Un Edificio in Muratura. Relazione TecnicaDocument55 pagesVerifica Di Un Edificio in Muratura. Relazione TecnicaBruno Savino MasciandaroNo ratings yet
- Telaio Metodo Matriciale (Fabio Di Trapani)Document17 pagesTelaio Metodo Matriciale (Fabio Di Trapani)Raducanu TheodorNo ratings yet
- Parte II - 8 Criteri Di Modellazione PDFDocument29 pagesParte II - 8 Criteri Di Modellazione PDFMatteo OliveriNo ratings yet
- Modellazione Al SapDocument98 pagesModellazione Al SapvaleriobiancoNo ratings yet
- Introduzione Al Metodo Degli Elementi FinitiDocument12 pagesIntroduzione Al Metodo Degli Elementi FinitichedelusioneNo ratings yet
- Assobeton Progettazione Sismica Strutture PrefabbricateDocument90 pagesAssobeton Progettazione Sismica Strutture Prefabbricatepulcino_mannaro100% (1)
- Appunti Costruzioni in Acciaio PDFDocument93 pagesAppunti Costruzioni in Acciaio PDFmick83_scribdNo ratings yet
- Straus 7Document21 pagesStraus 7AlessandroAleottiNo ratings yet
- Isolamento Sismico Di Edi Ci Semplici in Muratura Mediante Isolatori in Gomma Fibrorinforzata Non Confi NataDocument137 pagesIsolamento Sismico Di Edi Ci Semplici in Muratura Mediante Isolatori in Gomma Fibrorinforzata Non Confi NataStefano FolladorNo ratings yet
- Trave Su Suolo ElasticoDocument10 pagesTrave Su Suolo ElasticoPaoloGavardiNo ratings yet
- Ceravolo - Strutture in Acciaio E in Cemento Armato PDFDocument182 pagesCeravolo - Strutture in Acciaio E in Cemento Armato PDFValerio MastroianniNo ratings yet
- Tecnica Delle Costruzioni PIASTREDocument37 pagesTecnica Delle Costruzioni PIASTREDoulgorikyNo ratings yet
- Tesi 4 - Risposta Sismica Del Sistema Terreno-StrutturaDocument60 pagesTesi 4 - Risposta Sismica Del Sistema Terreno-StrutturaMatteo OliveriNo ratings yet
- 13-Analisi ModaleDocument15 pages13-Analisi Modaleq_giovanniNo ratings yet
- Desortis Dispense Tecnica 161109Document165 pagesDesortis Dispense Tecnica 161109RamboZNo ratings yet
- Ingegneria Civile Uniroma3 - III Anno - Tesi Triennale Di Mattia Campolese - Calcolo Travature Reticolari in Ambiente Matlab - Uniroma3Document94 pagesIngegneria Civile Uniroma3 - III Anno - Tesi Triennale Di Mattia Campolese - Calcolo Travature Reticolari in Ambiente Matlab - Uniroma3EdomrgNo ratings yet
- Relazione Di ProgettoDocument57 pagesRelazione Di ProgettoSig RossiNo ratings yet
- Structural Modeling TreDocument16 pagesStructural Modeling Trebosnia76No ratings yet
- Vulnerabilità Ponte Muratura Midas CspfeaDocument4 pagesVulnerabilità Ponte Muratura Midas CspfeaserafiniNo ratings yet
- Linee Di Influenza 2 PDFDocument8 pagesLinee Di Influenza 2 PDFShadiNo ratings yet
- Tecnica Delle Costruzioni 1 PDFDocument103 pagesTecnica Delle Costruzioni 1 PDFGianfrancoNo ratings yet
- CSP00095 (GEN-Teoria) Elemento WallDocument4 pagesCSP00095 (GEN-Teoria) Elemento Wallbosnia76No ratings yet
- Elementi Finiti Parte 2Document50 pagesElementi Finiti Parte 2alermsNo ratings yet
- Ponti Strallati1Document75 pagesPonti Strallati1pierluciolabella100% (1)
- Modellazione Platea NervataDocument3 pagesModellazione Platea NervataFabio IannoneNo ratings yet
- Criteri Di Base Della Progettazione SismicaDocument58 pagesCriteri Di Base Della Progettazione SismicaGiuseppe GentileNo ratings yet
- Studente Appunti Di Tecnica Delle CostruzioniDocument292 pagesStudente Appunti Di Tecnica Delle CostruzioniBokar Francesco DiopNo ratings yet
- Progettazione Di Edifici in Cemento Armato in Zona Sismica Esempi PraticiDocument164 pagesProgettazione Di Edifici in Cemento Armato in Zona Sismica Esempi PraticiStefania RinaldiNo ratings yet
- Cspfea 223 Gerarchia Delle ResistenzeDocument37 pagesCspfea 223 Gerarchia Delle ResistenzeSalvatore GambinoNo ratings yet
- Indice 147 PDFDocument53 pagesIndice 147 PDFMaurizio VellaNo ratings yet
- 01 Piastra KirchhoffDocument43 pages01 Piastra KirchhoffGiovanni VolpattiNo ratings yet
- Gusci E PiastreDocument64 pagesGusci E Piastrecarlo.doimoNo ratings yet
- SismiCad Corso - SAIE2010 IsolatoriDocument45 pagesSismiCad Corso - SAIE2010 IsolatoriraaafNo ratings yet
- Analisi Agli Elementi Finiti in Geotecnica (Studio Terrain)Document40 pagesAnalisi Agli Elementi Finiti in Geotecnica (Studio Terrain)Francesco BisoNo ratings yet
- 2013-10-01 Elementi Finiti e Analisi TermicaDocument31 pages2013-10-01 Elementi Finiti e Analisi Termicamaurizio_naddeo3601No ratings yet
- Meccanica Computazionale Delle StruttureDocument37 pagesMeccanica Computazionale Delle StruttureOmar STNo ratings yet
- Appunti FEMDocument49 pagesAppunti FEMCiccio D'ErchiaNo ratings yet
- Progetto Dinamica Delle StruttureDocument51 pagesProgetto Dinamica Delle StruttureAndrea Nicola TurcatoNo ratings yet
- Risoluzione Dei Telai Piani Esercizi Svolti 9788857903293Document3 pagesRisoluzione Dei Telai Piani Esercizi Svolti 9788857903293Federica Milillo0% (1)
- ManualeMeccanica Terre Abstract PDFDocument37 pagesManualeMeccanica Terre Abstract PDFValter FerrariNo ratings yet
- Vulnerabilità Sismica Edificio MuraturaDocument15 pagesVulnerabilità Sismica Edificio MuraturaNicola GermanoNo ratings yet
- Commentario delle nuove norme tecniche per le costruzioniFrom EverandCommentario delle nuove norme tecniche per le costruzioniRating: 5 out of 5 stars5/5 (1)
- Elettrotecnica | Passo dopo passo: Fondamenti, componenti & circuiti spiegati per principiantiFrom EverandElettrotecnica | Passo dopo passo: Fondamenti, componenti & circuiti spiegati per principiantiNo ratings yet
- Climatizzazione di edifici con pompe di calore geotermiche. Analisi termodinamica ed economicaFrom EverandClimatizzazione di edifici con pompe di calore geotermiche. Analisi termodinamica ed economicaRating: 4 out of 5 stars4/5 (1)
- Trasformazione lineare diretta: Applicazioni pratiche e tecniche nella visione artificialeFrom EverandTrasformazione lineare diretta: Applicazioni pratiche e tecniche nella visione artificialeNo ratings yet
- Teoria FluidodinamicaDocument262 pagesTeoria FluidodinamicaMassimo Moroni0% (1)
- Strumia, Meccanica Razionale, Cap.6Document21 pagesStrumia, Meccanica Razionale, Cap.6Veltro da CorvaiaNo ratings yet
- 02 - Parte II - Stati Piani Di Tensione e Deformazione - 6Document11 pages02 - Parte II - Stati Piani Di Tensione e Deformazione - 6Armando Di ChiaraNo ratings yet
- Le Polari Aerodinamiche Del Velivolo CompletoDocument59 pagesLe Polari Aerodinamiche Del Velivolo CompletovincemugnaioNo ratings yet
- Elica NavaleDocument41 pagesElica NavalevincemugnaioNo ratings yet
- Progettazione Di Un Attuatore PiezoDocument9 pagesProgettazione Di Un Attuatore PiezovincemugnaioNo ratings yet
- Calcolo A Scorrimento Viscoso Di Componenti MeccaniciDocument18 pagesCalcolo A Scorrimento Viscoso Di Componenti MeccanicivincemugnaioNo ratings yet
- Lezioni Di Ingegneria Del Vento: C B S PDocument244 pagesLezioni Di Ingegneria Del Vento: C B S PvincemugnaioNo ratings yet
- Calcoli Di Ingegneria Con ExcelDocument31 pagesCalcoli Di Ingegneria Con ExcelvincemugnaioNo ratings yet
- UNI 7473 DIN 982 ISO 7040: Dadi Esagonali Normali Autofrenanti Con Anello Di PoliammideDocument1 pageUNI 7473 DIN 982 ISO 7040: Dadi Esagonali Normali Autofrenanti Con Anello Di PoliammidevincemugnaioNo ratings yet
- Simulazione Del Modello Dinamico Di Un Serbatoio PDFDocument14 pagesSimulazione Del Modello Dinamico Di Un Serbatoio PDFvincemugnaioNo ratings yet
- Attuatori IdrauliciDocument21 pagesAttuatori IdraulicivincemugnaioNo ratings yet
- Analisi Integrata MultiBody FEM Del Comportamento Dinamico Di Un KartDocument10 pagesAnalisi Integrata MultiBody FEM Del Comportamento Dinamico Di Un KartvincemugnaioNo ratings yet
- Matiii 19.01.2022Document4 pagesMatiii 19.01.2022stefanocappelli850No ratings yet
- Esercizi Svolti Sulle Serie Di FourierDocument8 pagesEsercizi Svolti Sulle Serie Di FourierMichele Shin AbruzzeseNo ratings yet
- Congettura Di Collatz in NDocument23 pagesCongettura Di Collatz in NRosario TurcoNo ratings yet
- Parte9 Analisi Dei Circuiti Con MemoriaDocument30 pagesParte9 Analisi Dei Circuiti Con MemoriaAchilleNo ratings yet
- Analisi ComplessaDocument7 pagesAnalisi ComplessaCarlo Edoardo CapponiNo ratings yet