You might also like
- International Journal of Artificial Intelligence & Applications (IJAIA)Document2 pagesInternational Journal of Artificial Intelligence & Applications (IJAIA)Adam HansenNo ratings yet
- International Journal of Artificial Intelligence & Applications (IJAIA)Document2 pagesInternational Journal of Artificial Intelligence & Applications (IJAIA)Adam HansenNo ratings yet
- International Journal of Artificial Intelligence & Applications (IJAIA)Document2 pagesInternational Journal of Artificial Intelligence & Applications (IJAIA)Adam HansenNo ratings yet
- International Journal of Artificial Intelligence & Applications (IJAIA)Document2 pagesInternational Journal of Artificial Intelligence & Applications (IJAIA)Adam HansenNo ratings yet
- Uncertainty Estimation in Neural Networks Through Multi-Task LearningDocument13 pagesUncertainty Estimation in Neural Networks Through Multi-Task LearningAdam HansenNo ratings yet
- International Journal of Artificial Intelligence & Applications (IJAIA)Document2 pagesInternational Journal of Artificial Intelligence & Applications (IJAIA)Adam HansenNo ratings yet
- International Journal of Artificial Intelligence & Applications (IJAIA)Document2 pagesInternational Journal of Artificial Intelligence & Applications (IJAIA)Adam HansenNo ratings yet
- International Journal of Artificial Intelligence & Applications (IJAIA)Document2 pagesInternational Journal of Artificial Intelligence & Applications (IJAIA)Adam HansenNo ratings yet
- International Journal of Artificial Intelligence & Applications (IJAIA)Document2 pagesInternational Journal of Artificial Intelligence & Applications (IJAIA)Adam HansenNo ratings yet
- International Journal of Artificial Intelligence & Applications (IJAIA)Document2 pagesInternational Journal of Artificial Intelligence & Applications (IJAIA)Adam HansenNo ratings yet
- International Journal of Artificial Intelligence & Applications (IJAIA)Document2 pagesInternational Journal of Artificial Intelligence & Applications (IJAIA)Adam HansenNo ratings yet
- International Journal of Artificial Intelligence & Applications (IJAIA)Document2 pagesInternational Journal of Artificial Intelligence & Applications (IJAIA)Adam HansenNo ratings yet
- International Journal of Artificial Intelligence & Applications (IJAIA)Document2 pagesInternational Journal of Artificial Intelligence & Applications (IJAIA)Adam HansenNo ratings yet
- International Journal of Artificial Intelligence & Applications (IJAIA)Document2 pagesInternational Journal of Artificial Intelligence & Applications (IJAIA)Adam HansenNo ratings yet
- International Journal of Artificial Intelligence & Applications (IJAIA)Document2 pagesInternational Journal of Artificial Intelligence & Applications (IJAIA)Adam HansenNo ratings yet
- International Journal of Artificial Intelligence & Applications (IJAIA)Document2 pagesInternational Journal of Artificial Intelligence & Applications (IJAIA)Adam HansenNo ratings yet
- Book 2Document17 pagesBook 2Adam HansenNo ratings yet
- International Journal of Artificial Intelligence & Applications (IJAIA)Document2 pagesInternational Journal of Artificial Intelligence & Applications (IJAIA)Adam HansenNo ratings yet
- International Journal of Artificial Intelligence & Applications (IJAIA)Document2 pagesInternational Journal of Artificial Intelligence & Applications (IJAIA)Adam HansenNo ratings yet
- International Journal of Artificial Intelligence & Applications (IJAIA)Document2 pagesInternational Journal of Artificial Intelligence & Applications (IJAIA)Adam HansenNo ratings yet
- Design That Uses Ai To Overturn Stereotypes: Make Witches Wicked AgainDocument12 pagesDesign That Uses Ai To Overturn Stereotypes: Make Witches Wicked AgainAdam HansenNo ratings yet
- International Journal of Artificial Intelligence and Applications (IJAIA)Document2 pagesInternational Journal of Artificial Intelligence and Applications (IJAIA)Adam HansenNo ratings yet
- EDGE-Net: Efficient Deep-Learning Gradients Extraction NetworkDocument15 pagesEDGE-Net: Efficient Deep-Learning Gradients Extraction NetworkAdam HansenNo ratings yet
- A Comparison of Document Similarity AlgorithmsDocument10 pagesA Comparison of Document Similarity AlgorithmsAdam HansenNo ratings yet
- Call For Papers - International Journal of Artificial Intelligence & Applications (IJAIA)Document2 pagesCall For Papers - International Journal of Artificial Intelligence & Applications (IJAIA)Adam HansenNo ratings yet
- Development of An Intelligent Vital Sign Monitoring Robot SystemDocument21 pagesDevelopment of An Intelligent Vital Sign Monitoring Robot SystemAdam HansenNo ratings yet
- Spot-The-Camel: Computer Vision For Safer RoadsDocument10 pagesSpot-The-Camel: Computer Vision For Safer RoadsAdam HansenNo ratings yet
- Psychological Emotion Recognition of Students Using Machine Learning Based ChatbotDocument11 pagesPsychological Emotion Recognition of Students Using Machine Learning Based ChatbotAdam Hansen100% (1)
- Investigating The Effect of Bd-Craft To Text Detection AlgorithmsDocument16 pagesInvestigating The Effect of Bd-Craft To Text Detection AlgorithmsAdam HansenNo ratings yet
- An Authorship Identification Empirical Evaluation of Writing Style Features in Cross-Topic and Cross-Genre DocumentsDocument14 pagesAn Authorship Identification Empirical Evaluation of Writing Style Features in Cross-Topic and Cross-Genre DocumentsAdam HansenNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Highway Engineering B 1Document8 pagesHighway Engineering B 1Angelica TolentinoNo ratings yet
- Li-Fi Industries Communication Using Laser Media in Open SpaceDocument61 pagesLi-Fi Industries Communication Using Laser Media in Open SpaceVinothKumar100% (1)
- Asme eDocument41 pagesAsme eAnonymous wWOWz9UnWNo ratings yet
- Pressure Switch/Reed Switch Type: SeriesDocument4 pagesPressure Switch/Reed Switch Type: SeriesDaniel Mauro Inga SalazarNo ratings yet
- Microprocessors - Meppayil NarayananDocument34 pagesMicroprocessors - Meppayil NarayananmeppayilnarayananNo ratings yet
- GC120 Outline Rev SGDocument2 pagesGC120 Outline Rev SGsong perezNo ratings yet
- DHLDocument3 pagesDHLfmartinNo ratings yet
- TDG11Document100 pagesTDG11Splycho GoranNo ratings yet
- LOLERDocument68 pagesLOLERpraba8105100% (3)
- Roofing SafetyDocument38 pagesRoofing SafetyDhârâñî KûmârNo ratings yet
- Seetha ResumeDocument2 pagesSeetha Resumeseetha525No ratings yet
- Reviewer in Hairdressing (From Mastery Test)Document7 pagesReviewer in Hairdressing (From Mastery Test)peanut nutterNo ratings yet
- ManualDocument90 pagesManualBhárbara Idk100% (1)
- Scope: Ferritic Heat-Resistant Steel TK 1.4762Document5 pagesScope: Ferritic Heat-Resistant Steel TK 1.4762Siis IngenieriaNo ratings yet
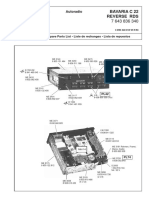
- Bavaria Reverse RdsDocument15 pagesBavaria Reverse RdsDušan JovanovićNo ratings yet
- Activity Sheets SMAW 7.23Document5 pagesActivity Sheets SMAW 7.23Jerome Cailo DiazNo ratings yet
- MR ValvesDocument56 pagesMR ValvesIdris SiddiquiNo ratings yet
- SNO-I-DS-001 - 0 Instrument Data Sheet For Shutdown and Blowdown Valves (Revise)Document174 pagesSNO-I-DS-001 - 0 Instrument Data Sheet For Shutdown and Blowdown Valves (Revise)ono_czeNo ratings yet
- Concrete Mix Design 10Document1 pageConcrete Mix Design 10Rexter UnabiaNo ratings yet
- Harmonic Oscillations of Spiral Springs - Springs Linked in Parallel and SeriesDocument5 pagesHarmonic Oscillations of Spiral Springs - Springs Linked in Parallel and SeriesJose GalvanNo ratings yet
- Muhammad Akif Naeem Open Ended Lab Signals and SystemDocument20 pagesMuhammad Akif Naeem Open Ended Lab Signals and SystemMuhammad Akif NaeemNo ratings yet
- Raman Spectroscopy SetupDocument13 pagesRaman Spectroscopy SetupRafael RamosNo ratings yet
- NextCloud OnlyOffice PDFDocument89 pagesNextCloud OnlyOffice PDFOmar Gallegos Vazquez100% (1)
- D91 PDFDocument3 pagesD91 PDFJuan Diego ArizabalNo ratings yet
- Annex12 Technical Cards For Accessible ConstructionDocument44 pagesAnnex12 Technical Cards For Accessible Constructionarchitectfemil6663No ratings yet
- 13 Ijee2962nsDocument15 pages13 Ijee2962nspurvakul10No ratings yet
- 3000w Inverter Parts ListDocument6 pages3000w Inverter Parts ListayoowuyeNo ratings yet
- Engineering Data Analysis (Mod2)Document7 pagesEngineering Data Analysis (Mod2)Mark Peru100% (1)
- Catalogo CMCDocument145 pagesCatalogo CMCalyboscanNo ratings yet
- Liebert PDX PCW Thermal Management System User ManualDocument184 pagesLiebert PDX PCW Thermal Management System User ManualJeffNo ratings yet