You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Discovery Issues Resolution Naga NotesDocument7 pagesDiscovery Issues Resolution Naga NotesNagaPrasannaKumarKakarlamudi100% (1)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Chapter 4Document21 pagesChapter 4Ahmad KhooryNo ratings yet
- 4as Lesson PlanDocument3 pages4as Lesson PlanLenette Alagon100% (3)
- KODIYATUDocument1 pageKODIYATUhafizrahimmitNo ratings yet
- Ledger PDFDocument1 pageLedger PDFhafizrahimmitNo ratings yet
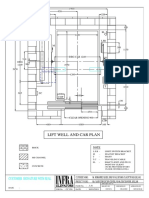
- Infra: Lift Well and Car PlanDocument1 pageInfra: Lift Well and Car PlanhafizrahimmitNo ratings yet
- Infra: Customer Signature With SealDocument1 pageInfra: Customer Signature With SealhafizrahimmitNo ratings yet
- Infra: Lift SpecificationsDocument1 pageInfra: Lift SpecificationshafizrahimmitNo ratings yet
- KODIYATTUDocument1 pageKODIYATTUhafizrahimmitNo ratings yet
- Proposal s8Document1 pageProposal s8hafizrahimmitNo ratings yet
- Tour Schedule (S5Eee) : Tour To - COORG-MYSORUDocument1 pageTour Schedule (S5Eee) : Tour To - COORG-MYSORUhafizrahimmitNo ratings yet
- Application For Renewal of Electrical Contractor LicenceDocument1 pageApplication For Renewal of Electrical Contractor LicencehafizrahimmitNo ratings yet
- TKM Institute of Technology: Lecture PlanDocument3 pagesTKM Institute of Technology: Lecture PlanhafizrahimmitNo ratings yet
- Electrical Machines LaboratoryDocument3 pagesElectrical Machines LaboratoryhafizrahimmitNo ratings yet
- Electrical LabDocument11 pagesElectrical LabhafizrahimmitNo ratings yet
- Electrical PDFDocument4 pagesElectrical PDFhafizrahimmitNo ratings yet
- Maintain Your Hot EquipmentDocument2 pagesMaintain Your Hot EquipmenthafizrahimmitNo ratings yet
- TKM Institute of Technology: Karuvelil.P.O, KollamDocument1 pageTKM Institute of Technology: Karuvelil.P.O, KollamhafizrahimmitNo ratings yet
- SUB: Permission For Displaying FlexDocument1 pageSUB: Permission For Displaying FlexhafizrahimmitNo ratings yet
- Vaibhav: RJ HuntDocument3 pagesVaibhav: RJ HunthafizrahimmitNo ratings yet
- 1 Female 2 Female 3 Female: Niranjana A Arathy Sreekumar Susmitha SugathanDocument1 page1 Female 2 Female 3 Female: Niranjana A Arathy Sreekumar Susmitha SugathanhafizrahimmitNo ratings yet
- TKM Institute of Technology, Karuvelil Department of Computer Sceince & Engineering S7 CSE (2013-2017) BATCHDocument4 pagesTKM Institute of Technology, Karuvelil Department of Computer Sceince & Engineering S7 CSE (2013-2017) BATCHhafizrahimmitNo ratings yet
- New Microsoft Word DocumentDocument12 pagesNew Microsoft Word DocumenthafizrahimmitNo ratings yet
- Study of The Further Reduction of Shaft Voltage of Brushless DC Motor With Insulated Rotor Driven by PWM InverterDocument6 pagesStudy of The Further Reduction of Shaft Voltage of Brushless DC Motor With Insulated Rotor Driven by PWM InverterhafizrahimmitNo ratings yet
- Tour Report s8Document2 pagesTour Report s8hafizrahimmitNo ratings yet
- Roll List S2 ECDocument11 pagesRoll List S2 EChafizrahimmitNo ratings yet
- Current AffairsDocument2 pagesCurrent AffairshafizrahimmitNo ratings yet
- First Name Second Name E Mail Id Talia Jude Reshma VP Haripriya S Anjali A Sambhu Mohan Jaisal ThomasDocument1 pageFirst Name Second Name E Mail Id Talia Jude Reshma VP Haripriya S Anjali A Sambhu Mohan Jaisal ThomashafizrahimmitNo ratings yet
- Mechanical s2 Roll ListDocument2 pagesMechanical s2 Roll ListhafizrahimmitNo ratings yet
- ELECTRICAL LAB Attendance Statement S2ME Feb 16Document9 pagesELECTRICAL LAB Attendance Statement S2ME Feb 16hafizrahimmitNo ratings yet
- Mechanical s2 Roll ListDocument2 pagesMechanical s2 Roll ListhafizrahimmitNo ratings yet
- ELECTRICAL LAB Attendance Statement S2ME Feb 16Document9 pagesELECTRICAL LAB Attendance Statement S2ME Feb 16hafizrahimmitNo ratings yet
- S 8 EiDocument11 pagesS 8 EihafizrahimmitNo ratings yet
- Class 10 Mid Term Syllabus 202324Document4 pagesClass 10 Mid Term Syllabus 202324Riya AggarwalNo ratings yet
- Theories and Paradigms in SociologyDocument10 pagesTheories and Paradigms in SociologyAngel KimNo ratings yet
- Computer Keyboard Shortcut Keys PDFDocument7 pagesComputer Keyboard Shortcut Keys PDFmuhammad sohail janjuaNo ratings yet
- Doppler Weather RadarDocument35 pagesDoppler Weather RadarjosefalguerasNo ratings yet
- PYTHONBOOKDocument32 pagesPYTHONBOOKJyotirmay SahuNo ratings yet
- 2 Gentlemen of VeronaDocument12 pages2 Gentlemen of VeronaAaravNo ratings yet
- Oral Communication in Context On Students' FINAL DEFENSEDocument11 pagesOral Communication in Context On Students' FINAL DEFENSETrecia Mae Boligao0% (1)
- TAFJ-AS JBossInstall v5.2 EAP PDFDocument33 pagesTAFJ-AS JBossInstall v5.2 EAP PDFrameshNo ratings yet
- Xaviers Institute of Social Service: Assignment On Quantitative TechniquesDocument20 pagesXaviers Institute of Social Service: Assignment On Quantitative Techniquesravi kumarNo ratings yet
- 14-) NonLinear Analysis of A Cantilever Beam PDFDocument7 pages14-) NonLinear Analysis of A Cantilever Beam PDFscs1720No ratings yet
- Andrew Haywood CV 2010Document6 pagesAndrew Haywood CV 2010Dobber0No ratings yet
- Change Sequence's Current Value (CURRVAL) Without Dropping It OraExplorerDocument6 pagesChange Sequence's Current Value (CURRVAL) Without Dropping It OraExplorerIan HughesNo ratings yet
- Catalogo Molas PratoDocument176 pagesCatalogo Molas Pratocassio_tecdrawNo ratings yet
- Third Periodical Assessment Test (Pat 3) Grade 8 - MathematicsDocument10 pagesThird Periodical Assessment Test (Pat 3) Grade 8 - Mathematicswerdubob100% (1)
- A Typical "Jyotish - Vedic Astrology" SessionDocument3 pagesA Typical "Jyotish - Vedic Astrology" SessionMariana SantosNo ratings yet
- SyllogismDocument6 pagesSyllogismjj3problembearNo ratings yet
- Neil Bryan N. Moninio: Professional GoalDocument3 pagesNeil Bryan N. Moninio: Professional GoalNeil Bryan N. MoninioNo ratings yet
- Eng 105 S 17 Review RubricDocument1 pageEng 105 S 17 Review Rubricapi-352956220No ratings yet
- Mexico For Sale. Rafael GuerreroDocument12 pagesMexico For Sale. Rafael GuerreroGabriela Durán ValisNo ratings yet
- Listening - Cot4thDocument6 pagesListening - Cot4thmichel.atilanoNo ratings yet
- Faiscp MK2 Om Eng 44311D PDFDocument60 pagesFaiscp MK2 Om Eng 44311D PDFJiso JisoNo ratings yet
- Pilot Test Evaluation Form - INSTRUCTORDocument9 pagesPilot Test Evaluation Form - INSTRUCTORKaylea NotarthomasNo ratings yet
- Conductivity On Animal SpermDocument8 pagesConductivity On Animal SpermAndrew AdamsNo ratings yet
- Qualifications Recruitment Promotions Scheme - University AcademicsDocument10 pagesQualifications Recruitment Promotions Scheme - University Academicsuteachers_slNo ratings yet
- Week 6 Team Zecca ReportDocument1 pageWeek 6 Team Zecca Reportapi-31840819No ratings yet
- Mock Test: Advanced English Material For The Gifted 2020Document13 pagesMock Test: Advanced English Material For The Gifted 2020Mai Linh ThânNo ratings yet
- Golden Rule ReferencingDocument48 pagesGolden Rule Referencingmia2908No ratings yet