You might also like
- PIC Projects With CCS PIC C Compiler - PIC16F877ADocument36 pagesPIC Projects With CCS PIC C Compiler - PIC16F877AWasang Juwi PracihnoNo ratings yet
- ATmega 1284 PDocument13 pagesATmega 1284 PWasang Juwi PracihnoNo ratings yet
- EMBEDDEDSECTIONDocument84 pagesEMBEDDEDSECTIONWasang Juwi PracihnoNo ratings yet
- Ina 122Document14 pagesIna 122Wasang Juwi PracihnoNo ratings yet
- PND Valve DatasheetDocument4 pagesPND Valve DatasheetWasang Juwi PracihnoNo ratings yet
- Tgs 2201Document2 pagesTgs 2201Wasang Juwi PracihnoNo ratings yet
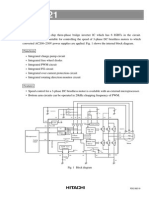
- ECN3021Document10 pagesECN3021Wasang Juwi PracihnoNo ratings yet
- RX Busur PanahDocument1 pageRX Busur PanahWasang Juwi PracihnoNo ratings yet
- Pressure Conversion: MMHG Inhg Inhg MMHGDocument2 pagesPressure Conversion: MMHG Inhg Inhg MMHGWasang Juwi PracihnoNo ratings yet
- Adult Blood Pressure ManualDocument44 pagesAdult Blood Pressure Manualqud86No ratings yet
- 448 Asyranzyratibintiyahya2013Document73 pages448 Asyranzyratibintiyahya2013Wasang Juwi PracihnoNo ratings yet
- Icd2 SchematicDocument3 pagesIcd2 SchematicWasang Juwi PracihnoNo ratings yet
- Bioe415 Lec05Document14 pagesBioe415 Lec05Wasang Juwi PracihnoNo ratings yet
- Systolic Blood Pressure Recovery TimeDocument16 pagesSystolic Blood Pressure Recovery TimeWasang Juwi PracihnoNo ratings yet
- FEZ877 - JDM PROGRAMMER User GuideDocument1 pageFEZ877 - JDM PROGRAMMER User GuideWasang Juwi PracihnoNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Shri Naina Devi Aarti English 167Document5 pagesShri Naina Devi Aarti English 167ratt182No ratings yet
- Nizkor Project Fallacies - LabossierDocument77 pagesNizkor Project Fallacies - Labossierapi-3766098100% (1)
- 444323735-Chem-Matters-Workbook-2E-Teacher-s-Edn-pdf 16-16Document1 page444323735-Chem-Matters-Workbook-2E-Teacher-s-Edn-pdf 16-16whatisNo ratings yet
- Central University of Karnataka: Entrance Examinations Results 2016Document4 pagesCentral University of Karnataka: Entrance Examinations Results 2016Saurabh ShubhamNo ratings yet
- AE Notification 2015 NPDCLDocument24 pagesAE Notification 2015 NPDCLSuresh DoosaNo ratings yet
- Nantai Catalog NewDocument30 pagesNantai Catalog Newspalomos100% (1)
- Mfin 7002 Investment Analysis and Portfolio ManagementDocument5 pagesMfin 7002 Investment Analysis and Portfolio ManagementjessieNo ratings yet
- Hare and Hyena: Mutugi KamundiDocument18 pagesHare and Hyena: Mutugi KamundiAndresileNo ratings yet
- Enlightened ExperimentationDocument8 pagesEnlightened ExperimentationRaeed HassanNo ratings yet
- ICMApprovedCentres - Ghana PDFDocument8 pagesICMApprovedCentres - Ghana PDFPrince Kelly100% (2)
- Acting White 2011 SohnDocument18 pagesActing White 2011 SohnrceglieNo ratings yet
- PM Jobs Comp Ir RandDocument9 pagesPM Jobs Comp Ir Randandri putrantoNo ratings yet
- Very Narrow Aisle MTC Turret TruckDocument6 pagesVery Narrow Aisle MTC Turret Truckfirdaushalam96No ratings yet
- European Asphalt Standards DatasheetDocument1 pageEuropean Asphalt Standards DatasheetmandraktreceNo ratings yet
- Boundary Value Analysis 2Document13 pagesBoundary Value Analysis 2Raheela NasimNo ratings yet
- Genil v. Rivera DigestDocument3 pagesGenil v. Rivera DigestCharmila SiplonNo ratings yet
- Maya Deren PaperDocument9 pagesMaya Deren PaperquietinstrumentalsNo ratings yet
- Been There, Done That, Wrote The Blog: The Choices and Challenges of Supporting Adolescents and Young Adults With CancerDocument8 pagesBeen There, Done That, Wrote The Blog: The Choices and Challenges of Supporting Adolescents and Young Adults With CancerNanis DimmitrisNo ratings yet
- CURRICULUM PharmasubDocument10 pagesCURRICULUM PharmasubZE Mart DanmarkNo ratings yet
- ABARI-Volunteer Guide BookDocument10 pagesABARI-Volunteer Guide BookEla Mercado0% (1)
- Work Breakdown StructureDocument8 pagesWork Breakdown StructurerenshagullNo ratings yet
- State Space ModelsDocument19 pagesState Space Modelswat2013rahulNo ratings yet
- KDE11SSDocument2 pagesKDE11SSluisgomezpasion1No ratings yet
- The New Order of BarbariansDocument39 pagesThe New Order of Barbariansbadguy100% (1)
- The Turning Circle of VehiclesDocument2 pagesThe Turning Circle of Vehiclesanon_170098985No ratings yet
- Caterpillar Cat C7 Marine Engine Parts Catalogue ManualDocument21 pagesCaterpillar Cat C7 Marine Engine Parts Catalogue ManualkfsmmeNo ratings yet
- Sample CVFormat 1Document2 pagesSample CVFormat 1subham.sharmaNo ratings yet
- Precursor Effects of Citric Acid and Citrates On Zno Crystal FormationDocument7 pagesPrecursor Effects of Citric Acid and Citrates On Zno Crystal FormationAlv R GraciaNo ratings yet
- Genuine Fakes: How Phony Things Teach Us About Real StuffDocument2 pagesGenuine Fakes: How Phony Things Teach Us About Real StuffGail LeondarWrightNo ratings yet
- Dialectical Relationship Between Translation Theory and PracticeDocument5 pagesDialectical Relationship Between Translation Theory and PracticeEverything Under the sunNo ratings yet