You might also like
- Voltage To Frequency ConverterDocument7 pagesVoltage To Frequency ConverterRodfer SorianoNo ratings yet
- 19 Current ControlDocument5 pages19 Current ControlZeshan LatifNo ratings yet
- L6219DSDocument12 pagesL6219DSaminotepNo ratings yet
- Dual Full-Bridge Driver: DescriptionDocument13 pagesDual Full-Bridge Driver: DescriptionBaher Bassem MorkosNo ratings yet
- Using The Current Sensing IR212X Gate Drive ICs GuideDocument7 pagesUsing The Current Sensing IR212X Gate Drive ICs Guidequang nguyenNo ratings yet
- Dsa 289591 PDFDocument18 pagesDsa 289591 PDFIordan Dan FfnNo ratings yet
- VNH2SP30-E: Automotive Fully Integrated H-Bridge Motor DriverDocument26 pagesVNH2SP30-E: Automotive Fully Integrated H-Bridge Motor DriverIan LuksNo ratings yet
- Service Manual: 17-Inch LCD Monitor AL1702Document38 pagesService Manual: 17-Inch LCD Monitor AL1702Abhilash VamanNo ratings yet
- Obsolete Product(s) - Obsolete Product(s) Obsolete Product(s) - Obsolete Product(s)Document15 pagesObsolete Product(s) - Obsolete Product(s) Obsolete Product(s) - Obsolete Product(s)teomondoNo ratings yet
- ZXSC410 420Document12 pagesZXSC410 420Catalin TirtanNo ratings yet
- LB1845 DDocument9 pagesLB1845 DFernando LizarragaNo ratings yet
- Application Note An-1052: Using The Ir217X Linear Current Sensing IcsDocument7 pagesApplication Note An-1052: Using The Ir217X Linear Current Sensing IcsLullaby summerNo ratings yet
- I CL 8013 Data SheetDocument9 pagesI CL 8013 Data SheetSebastian FossNo ratings yet
- Imprimir Datasheet 1Document14 pagesImprimir Datasheet 1Randy Siancas VelezNo ratings yet
- HV Floating MOS-Gate Driver ICs Application NoteDocument24 pagesHV Floating MOS-Gate Driver ICs Application NoteEdy AchalmaNo ratings yet
- Irams 10 Up 60 ADocument17 pagesIrams 10 Up 60 AricwerNo ratings yet
- EDN Design Ideas 2007Document146 pagesEDN Design Ideas 2007chag1956100% (2)
- Viper22a Equivalent PDFDocument16 pagesViper22a Equivalent PDFXande Nane Silveira0% (1)
- MAX1702EDocument5 pagesMAX1702ERafael HurtadoNo ratings yet
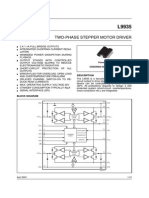
- Two-Phase Stepper Motor Driver: DescriptionDocument19 pagesTwo-Phase Stepper Motor Driver: DescriptionDan EsentherNo ratings yet
- DCpower SuplyDocument12 pagesDCpower Suplymm30973097No ratings yet
- L4972ADocument23 pagesL4972ARICHIHOTS2No ratings yet
- Saa1042v PDFDocument7 pagesSaa1042v PDFVinny TukNo ratings yet
- DiDocument5 pagesDiByron DamaniaNo ratings yet
- An-978 HV Floating MOS Gate DriversDocument21 pagesAn-978 HV Floating MOS Gate DriversPeter RueNo ratings yet
- Chapter Three2Document12 pagesChapter Three2Fuh ValleryNo ratings yet
- SCADADocument57 pagesSCADAkailasamvv100% (1)
- MC33883Document21 pagesMC33883Nguyen TuanNo ratings yet
- Chapter One Controlling The Operation of Wind-Solar Hybrid Power System Using Arduino-Based Hybrid MPPT ControllerDocument48 pagesChapter One Controlling The Operation of Wind-Solar Hybrid Power System Using Arduino-Based Hybrid MPPT ControllerOdebunmi NathanielNo ratings yet
- Principles Applications ICL7660Document10 pagesPrinciples Applications ICL7660Juan F. RamosNo ratings yet
- Ncl30160 1.0A Constant-Current Buck Regulator For Driving High Power LedsDocument10 pagesNcl30160 1.0A Constant-Current Buck Regulator For Driving High Power LedsKhúc Hành QuânNo ratings yet
- Motor Controller Data SheetDocument13 pagesMotor Controller Data Sheetapi-284769767No ratings yet
- Ijecet: International Journal of Electronics and Communication Engineering & Technology (Ijecet)Document10 pagesIjecet: International Journal of Electronics and Communication Engineering & Technology (Ijecet)IAEME PublicationNo ratings yet
- SVAR Power FactorDocument5 pagesSVAR Power FactorRyan HarrisNo ratings yet
- Raychem Instruction ManualDocument17 pagesRaychem Instruction ManualjaikolangaraparambilNo ratings yet
- CD 00003131Document24 pagesCD 000031314131etasNo ratings yet
- MB39A132Document60 pagesMB39A132Krum BumbarovNo ratings yet
- LB1845 PWM Current ControlDocument7 pagesLB1845 PWM Current ControlNacer MezghicheNo ratings yet
- 10884Document13 pages10884karthikeidNo ratings yet
- Simple PWM Boost Controller: Power Management Features DescriptionDocument11 pagesSimple PWM Boost Controller: Power Management Features DescriptionJoe MiguelNo ratings yet
- IRDC2086-330W Reference Design User GuideDocument8 pagesIRDC2086-330W Reference Design User GuidekijoNo ratings yet
- EDN Design Ideas 2004Document155 pagesEDN Design Ideas 2004chag1956100% (2)
- Undervoltage / Overvoltage Lockout: DC-DC Converter UV/OV Lockout CircuitDocument9 pagesUndervoltage / Overvoltage Lockout: DC-DC Converter UV/OV Lockout CircuitsathyaeeeNo ratings yet
- Ca 3524Document20 pagesCa 3524rmsharma1970No ratings yet
- DC-DC Boost Converter For Custom Application by LeenaDocument4 pagesDC-DC Boost Converter For Custom Application by LeenaRekhamtrNo ratings yet
- Uc3842 Provides Low-Cost Current-Mode Control: Application NoteDocument16 pagesUc3842 Provides Low-Cost Current-Mode Control: Application NoteLeonardo Ortiz100% (1)
- Synchronous Rectification DC/DC Converter IC For Charging Li-Ion BatteryDocument56 pagesSynchronous Rectification DC/DC Converter IC For Charging Li-Ion BatterydigenioNo ratings yet
- Sames: Three Phase Power / Energy IC With SPI InterfaceDocument12 pagesSames: Three Phase Power / Energy IC With SPI InterfaceArjun NivassNo ratings yet
- An 18Document12 pagesAn 18teomondoNo ratings yet
- DC/DC Converter Operation GuideDocument6 pagesDC/DC Converter Operation GuidesaeidraminaNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Analog Circuit Design Volume Three: Design Note CollectionFrom EverandAnalog Circuit Design Volume Three: Design Note CollectionRating: 3 out of 5 stars3/5 (2)
- Power Supply Projects: A Collection of Innovative and Practical Design ProjectsFrom EverandPower Supply Projects: A Collection of Innovative and Practical Design ProjectsRating: 3 out of 5 stars3/5 (2)
- 110 Waveform Generator Projects for the Home ConstructorFrom Everand110 Waveform Generator Projects for the Home ConstructorRating: 4 out of 5 stars4/5 (1)
- Newnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1From EverandNewnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1Rating: 4.5 out of 5 stars4.5/5 (3)
- Audio IC Projects: A Collection of Useful Circuits Based on Readily Available ChipsFrom EverandAudio IC Projects: A Collection of Useful Circuits Based on Readily Available ChipsNo ratings yet
- LCD 2x16aDocument15 pagesLCD 2x16aTaufik InsaniNo ratings yet
- DC-DC Konverter Basic DesignDocument16 pagesDC-DC Konverter Basic DesignTaufik InsaniNo ratings yet
- (FRC 2012) Image Processing TutorialDocument20 pages(FRC 2012) Image Processing TutorialJin-Jia HuNo ratings yet
- At Mega 8535Document321 pagesAt Mega 8535nanggrianaNo ratings yet
- Wind Generator Home Made Axial Flux Alternator How It WorksDocument15 pagesWind Generator Home Made Axial Flux Alternator How It Workssmajla123No ratings yet
- Mipi Csi 2 TX RX LNT t2m NondaDocument2 pagesMipi Csi 2 TX RX LNT t2m NondaPups Bodhisattva DasNo ratings yet
- Intro To SynthesisDocument7 pagesIntro To SynthesisVictor-Jan GoemansNo ratings yet
- Activity Sheets Week 2Document5 pagesActivity Sheets Week 2Glen Ruzzel ElleveraNo ratings yet
- Earn Real Money Playing Lost Relics Blockchain RPGDocument3 pagesEarn Real Money Playing Lost Relics Blockchain RPGEuvher John VilladolidNo ratings yet
- Basic ArithmeticDocument5 pagesBasic ArithmeticKamil KAmikaziNo ratings yet
- Use Cases of 5GDocument17 pagesUse Cases of 5GDinoNo ratings yet
- Merit Awards List 1 Year 2 Assembly 23rd FebDocument2 pagesMerit Awards List 1 Year 2 Assembly 23rd FebNicholas FengarosNo ratings yet
- 2.note Making - StepsDocument4 pages2.note Making - StepsRadhika JaiswalNo ratings yet
- Gandhi and Sexuality: in What Ways and To What Extent Was Gandhi's Life Dominated by His Views On Sex and Sexuality?Document41 pagesGandhi and Sexuality: in What Ways and To What Extent Was Gandhi's Life Dominated by His Views On Sex and Sexuality?john abrahamNo ratings yet
- F2.fmDocument13 pagesF2.fmantariksh.f.parikhNo ratings yet
- Meilia2020 Article AReviewOfCausalInferenceInFore PDFDocument8 pagesMeilia2020 Article AReviewOfCausalInferenceInFore PDFuchumuhammadNo ratings yet
- Mechanics & Engg. Materials Practice QuestionDocument15 pagesMechanics & Engg. Materials Practice QuestionPratik MondalNo ratings yet
- Jatco F1C1 CVT Transmission Parts GuideDocument2 pagesJatco F1C1 CVT Transmission Parts Guideingent6aNo ratings yet
- Integrating The School and Community As An Administrative and Supervisory FunctionDocument5 pagesIntegrating The School and Community As An Administrative and Supervisory FunctionObediente Angie Lou44% (9)
- Virtual Orientation Guide for District Facilitators on Project e-MTAP 2.0 ImplementationDocument25 pagesVirtual Orientation Guide for District Facilitators on Project e-MTAP 2.0 ImplementationJoseph S. Palileo Jr.No ratings yet
- Symbiosis School of Banking and Finance (SSBF)Document20 pagesSymbiosis School of Banking and Finance (SSBF)bkniluNo ratings yet
- 1st Quarter Exam PR2Document4 pages1st Quarter Exam PR2Joan Franz AlegaNo ratings yet
- Arctic Cat - 2002 - zr120 Parts ManualDocument22 pagesArctic Cat - 2002 - zr120 Parts ManualHarold GillNo ratings yet
- Applying For HousekeepingDocument4 pagesApplying For HousekeepingAsankaFernandoNo ratings yet
- Achievers B1 Grammar Worksheet Support Unit 2Document1 pageAchievers B1 Grammar Worksheet Support Unit 2Mr Mohamed SharkawyNo ratings yet
- POLYNOMIALS PRACTICE MCQSDocument12 pagesPOLYNOMIALS PRACTICE MCQSSumukh Gowda.MNo ratings yet
- MS - 33 Rev 0 - Reinstatement of KNO.06 Lateral Line AsphaltDocument6 pagesMS - 33 Rev 0 - Reinstatement of KNO.06 Lateral Line AsphaltSyed Umair HashmiNo ratings yet
- MRF Tyres 1Document5 pagesMRF Tyres 1NirmalNo ratings yet
- Flat Flexible Cable Extruded For ClockspringDocument6 pagesFlat Flexible Cable Extruded For ClockspringJani ZorNo ratings yet
- Bearing TestersDocument6 pagesBearing TestersAshwani KansaraNo ratings yet
- Tokyo D. I. A. Building: A Case Study On Base Isolaters in A BuildingDocument7 pagesTokyo D. I. A. Building: A Case Study On Base Isolaters in A BuildingSalahuddin ShaikhNo ratings yet
- CMMI High Maturity Best Practices HMBP 2010: Process Performance Models:Not Necessarily Complex by Himanshu Pandey and Nishu LohiaDocument25 pagesCMMI High Maturity Best Practices HMBP 2010: Process Performance Models:Not Necessarily Complex by Himanshu Pandey and Nishu LohiaQAINo ratings yet
- Project Planning NotesDocument13 pagesProject Planning NotesEljah NjoraNo ratings yet
- DOM AssignmentDocument2 pagesDOM AssignmentBharath NNo ratings yet
- Case Study CorridorsDocument3 pagesCase Study Corridorsapi-236051971No ratings yet