You might also like
- Experiment 10 Analog-to-Digital Converter (ADC) in PIC18F452 ObjectiveDocument10 pagesExperiment 10 Analog-to-Digital Converter (ADC) in PIC18F452 Objectivehira Nawaz100% (1)
- Arinc 717Document2 pagesArinc 717Роман Дяченко0% (1)
- Examples: I2C Mode Serial Mode PWM ModeDocument6 pagesExamples: I2C Mode Serial Mode PWM ModeVictor JoseNo ratings yet
- Cmps 09Document5 pagesCmps 09Luis Felipe Hernández ZambranoNo ratings yet
- CMPS03 DocumentationDocument5 pagesCMPS03 DocumentationNguyễn Đức LợiNo ratings yet
- CMPS03Document7 pagesCMPS03Đặng Xuân HồngNo ratings yet
- Cmps03 ManualDocument3 pagesCmps03 ManualEnggewe AwaNo ratings yet
- Cmps 03Document12 pagesCmps 03yofianajNo ratings yet
- CMPS03 - Robot Compass ModuleDocument4 pagesCMPS03 - Robot Compass ModuleTo Be FunnyNo ratings yet
- Rotary EncoderDocument6 pagesRotary EncoderalesysNo ratings yet
- 8086 PPTDocument30 pages8086 PPTKavitha Subramaniam100% (1)
- Digital Pulse Counter - Two Digits: DescriptionDocument7 pagesDigital Pulse Counter - Two Digits: DescriptionAsgher KhattakNo ratings yet
- CMPS14 - Documentation: 3.3v-5v Sda/Tx SCL/RX Mode Factory Use 0v GroundDocument7 pagesCMPS14 - Documentation: 3.3v-5v Sda/Tx SCL/RX Mode Factory Use 0v GroundRidhoNo ratings yet
- MODBUS Protocol CU9010-9020 ENGDocument14 pagesMODBUS Protocol CU9010-9020 ENGaminebenyagoub0009No ratings yet
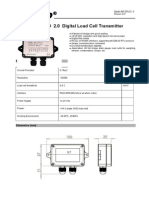
- RW-ST01D 2.0 ManualDocument5 pagesRW-ST01D 2.0 ManualUndibal Alejandro RivasNo ratings yet
- Protocolo RS485 VFD-LDocument14 pagesProtocolo RS485 VFD-LJulio GoulartNo ratings yet
- I2C TutorialDocument9 pagesI2C TutorialLuis Angel Nina Sánchez100% (3)
- Interfacing To The DS1631 Digital Thermometer and Thermostat in A Microcontroller EnvironmentDocument12 pagesInterfacing To The DS1631 Digital Thermometer and Thermostat in A Microcontroller Environmentrusty123xNo ratings yet
- Tongta Inverter: MODBUS Communication Application ManualDocument21 pagesTongta Inverter: MODBUS Communication Application ManualdsarabiaNo ratings yet
- ADC TutorialDocument17 pagesADC TutorialNagabhushanam KoduriNo ratings yet
- Data Acq SystemDocument8 pagesData Acq SystemAnonymous kT0ONWNo ratings yet
- 24AA254 Memory I2C With The XC8 C Compiler - AN1488ADocument24 pages24AA254 Memory I2C With The XC8 C Compiler - AN1488Aalexandre.oneill2479No ratings yet
- Tongta Inverter: MODBUS Communication Application ManualDocument22 pagesTongta Inverter: MODBUS Communication Application Manualsachyute50% (2)
- How To Use MMCDocument11 pagesHow To Use MMCXHieu NguyenNo ratings yet
- MPMC AnswersDocument10 pagesMPMC AnswersMuralicheenuNo ratings yet
- 7 Communication PDFDocument32 pages7 Communication PDFPatricio LemaNo ratings yet
- ECE222 DP1 Binary MultiplierDocument8 pagesECE222 DP1 Binary Multiplierprasad357No ratings yet
- Implementation of Adaptive Viterbi Decoder Through FpgaDocument5 pagesImplementation of Adaptive Viterbi Decoder Through Fpgaroshan2468No ratings yet
- Programmable Keyboard-Display Interface - 8279Document4 pagesProgrammable Keyboard-Display Interface - 8279api-27259648100% (2)
- ACDR1CE2Document24 pagesACDR1CE2Erica BeasleyNo ratings yet
- Lab 4: Analog To Digital Converter On Ts-5500 SBC: ObjectivesDocument7 pagesLab 4: Analog To Digital Converter On Ts-5500 SBC: ObjectivesJY FooNo ratings yet
- CH 7Document23 pagesCH 7Anonymous 7WsOWImuNo ratings yet
- 24C02Document27 pages24C02Biswajit SarkarNo ratings yet
- Graig: ADC in AVRDocument7 pagesGraig: ADC in AVRSibin PaNo ratings yet
- KO95 MappingDocument18 pagesKO95 MappingNovan WPNo ratings yet
- Turbo IC, Inc.: Cmos I C 2-Wire Bus 4K Electrically Erasable Programmable Rom 512 X 8 Bit EepromDocument8 pagesTurbo IC, Inc.: Cmos I C 2-Wire Bus 4K Electrically Erasable Programmable Rom 512 X 8 Bit EepromMohamed ZayedNo ratings yet
- This Project in PDF: Construction-1 Construction-2 Construction-3 CalibrationDocument15 pagesThis Project in PDF: Construction-1 Construction-2 Construction-3 CalibrationPravin MevadaNo ratings yet
- CPR E 381x/382x Lab11aDocument10 pagesCPR E 381x/382x Lab11aHelenNo ratings yet
- C-Mode (Unidirectional) For Encoders: Data SheetDocument4 pagesC-Mode (Unidirectional) For Encoders: Data Sheetlorand_nastranNo ratings yet
- Hardware PracticalsDocument51 pagesHardware PracticalsHarsh AlkutkarNo ratings yet
- PIC Analog To Digital Converter TutorialDocument5 pagesPIC Analog To Digital Converter TutorialSharath MunduriNo ratings yet
- Adc PWMDocument26 pagesAdc PWMShivaram Reddy ManchireddyNo ratings yet
- Digital Assignment-1Document10 pagesDigital Assignment-1Dev Shankar PaulNo ratings yet
- ADC Interfacing With MicrocontrollersDocument9 pagesADC Interfacing With MicrocontrollersLuis MezaNo ratings yet
- 256K SPI Bus Low-Power Serial SRAM: Device Selection TableDocument24 pages256K SPI Bus Low-Power Serial SRAM: Device Selection TableMarcinCholewaNo ratings yet
- Modbus Map OmronDocument6 pagesModbus Map OmronhellboylovingNo ratings yet
- Digital Assignment 2Document20 pagesDigital Assignment 2Anup PatelNo ratings yet
- Modbus ASCII Vs Modbus RTUDocument5 pagesModbus ASCII Vs Modbus RTUMarcela SanchezNo ratings yet
- MB85RS64V DS501 00015 4v0 EDocument36 pagesMB85RS64V DS501 00015 4v0 EimadNo ratings yet
- Advanced Topics: 17.1 Hardware Control Using I/O PortsDocument34 pagesAdvanced Topics: 17.1 Hardware Control Using I/O Portsbarbarossa17No ratings yet
- I2C Tutorial PDFDocument4 pagesI2C Tutorial PDFpankaj5121990No ratings yet
- Advanced Micro 2Document18 pagesAdvanced Micro 2Shahabaj DangeNo ratings yet
- Adc Lab Pic18Document23 pagesAdc Lab Pic18Bolarinwa Joseph100% (1)
- Br24c01a PDFDocument13 pagesBr24c01a PDFJesus LawrenceNo ratings yet
- Adc PDFDocument31 pagesAdc PDFjamiebrown7718No ratings yet
- Micro Pross e orDocument5 pagesMicro Pross e orMahfuz HasanNo ratings yet
- ADC Notes 2Document1 pageADC Notes 2hassanNo ratings yet
- Digital LED Thermometer with Microcontroller AVR ATtiny13From EverandDigital LED Thermometer with Microcontroller AVR ATtiny13Rating: 5 out of 5 stars5/5 (1)
- CANopen Manual 920-0025LDocument101 pagesCANopen Manual 920-0025LVictor ManuelNo ratings yet
- Momentum Infocare - Corporate PresentationDocument15 pagesMomentum Infocare - Corporate PresentationkaushikNo ratings yet
- CommandsDocument4 pagesCommandscidBookBeeNo ratings yet
- Cs9228 Web Technology Lab ManualDocument90 pagesCs9228 Web Technology Lab Manualkeerthi_sm18No ratings yet
- Linux PortionDocument10 pagesLinux PortionAKASH CHAUDHARYNo ratings yet
- Firebird 2.1 ReleaseNotesDocument172 pagesFirebird 2.1 ReleaseNotescgarciaglNo ratings yet
- Infosphere Information Server (Datastage) - Installation ProcessDocument12 pagesInfosphere Information Server (Datastage) - Installation ProcesssrimkbNo ratings yet
- User PromptsDocument12 pagesUser PromptstolekhiniraoNo ratings yet
- Active Directory Lightweight Directory Services RoleDocument4 pagesActive Directory Lightweight Directory Services RoleSamehAhmedHassanNo ratings yet
- Datasheet XBee S3BDocument150 pagesDatasheet XBee S3BAnonymous z0CzZFH100% (2)
- SAS - ChecklistDocument27 pagesSAS - ChecklistmfilipelopesNo ratings yet
- Essbase Block Formation: Dimension Stored Members Storage TypeDocument5 pagesEssbase Block Formation: Dimension Stored Members Storage TypeVikrant SinghNo ratings yet
- CS Study Material ChandigarhDocument151 pagesCS Study Material Chandigarhhumanu796No ratings yet
- Hcia-Sdn v1.0 Lab GuideDocument49 pagesHcia-Sdn v1.0 Lab GuideGhallab AlsadehNo ratings yet
- Introduction To Distribucted Application Layer ProtocolsDocument6 pagesIntroduction To Distribucted Application Layer ProtocolsAnil yadavNo ratings yet
- Install Raspberry Pi 3.5" Touch Screen Driver For Raspbian StretchDocument13 pagesInstall Raspberry Pi 3.5" Touch Screen Driver For Raspbian StretchguilhermewrNo ratings yet
- Asus F80L - F80Q SchemeDocument59 pagesAsus F80L - F80Q Schemecyper8No ratings yet
- Dell FluidFS Architecture For System PerformanceDocument14 pagesDell FluidFS Architecture For System PerformanceLenin Kumar100% (1)
- MimeDocument4 pagesMimeSángNo ratings yet
- FarLinX X.25 Gateway ConfigurationDocument12 pagesFarLinX X.25 Gateway ConfigurationSaad AliNo ratings yet
- Digital CommunicationsDocument62 pagesDigital CommunicationsKenNo ratings yet
- Oracle SQL plsql-264-349Document86 pagesOracle SQL plsql-264-349Pravin SainiNo ratings yet
- Impact of Storage Devices On The EnviromentDocument4 pagesImpact of Storage Devices On The Enviromentalfredsamsele2100% (1)
- Syllabus For CDAC CETDocument1 pageSyllabus For CDAC CETMotuBahiNo ratings yet
- Topic 3 Data Models PDFDocument12 pagesTopic 3 Data Models PDFvibhav thakurNo ratings yet
- Database AnalysisDocument4 pagesDatabase AnalysisRaheelNo ratings yet
- SEIT LDCOL - Oral Question Bank - 2020-21Document5 pagesSEIT LDCOL - Oral Question Bank - 2020-21Madhukar NimbalkarNo ratings yet
- Lecture 2: Sorting TechniquesDocument34 pagesLecture 2: Sorting TechniquesMalik QudoosNo ratings yet
- New 9Document3 pagesNew 9Raj PradeepNo ratings yet