You might also like
- Seguidor de Linea (Gamc)Document25 pagesSeguidor de Linea (Gamc)Gato Alvear50% (2)
- Tren Flotante: Allanando el camino hacia los futuros trenes de alta velocidadFrom EverandTren Flotante: Allanando el camino hacia los futuros trenes de alta velocidadNo ratings yet
- Robótica Móvil PDFDocument35 pagesRobótica Móvil PDFDavid QuintoNo ratings yet
- Carro Seguidor de LuzDocument15 pagesCarro Seguidor de Luzblondet95No ratings yet
- TRAYECTORIASDocument23 pagesTRAYECTORIASCarlos VazquezNo ratings yet
- Caracerizacion de Robot FamucDocument70 pagesCaracerizacion de Robot FamucJulia FernandezNo ratings yet
- Construcción Del Robót Seguidor de LíneaDocument11 pagesConstrucción Del Robót Seguidor de LíneaDavid Goez80% (5)
- Introduccion A La RoboticaDocument101 pagesIntroduccion A La RoboticaSEBASTIAN HUMBERTO RIVAS CIFUENTES100% (1)
- Tema 2 - Morfología Del RobotDocument44 pagesTema 2 - Morfología Del RobotDulce VelizNo ratings yet
- Sistema Seguidor de LuzDocument6 pagesSistema Seguidor de LuzCesar Ordoñez OrtizNo ratings yet
- Plan de Mantenimiento Robot Paketizador - FujiDocument2 pagesPlan de Mantenimiento Robot Paketizador - FujiAlfredoFloresNo ratings yet
- Practica#7Document10 pagesPractica#7Alexiz CuNo ratings yet
- Fresadora CNCDocument17 pagesFresadora CNCIan Gómez QuinteroNo ratings yet
- Seguidor de LuzDocument2 pagesSeguidor de LuzKelly DucuaraNo ratings yet
- Robot XYDocument6 pagesRobot XYFrediSotoNo ratings yet
- Toolbox MatlabDocument8 pagesToolbox MatlabSergio SorucoNo ratings yet
- Reporte de SimulaciónDocument11 pagesReporte de SimulaciónIngGuillermoVenturaNo ratings yet
- Taller de Simulacion y Programación de Robots IndustrialesDocument38 pagesTaller de Simulacion y Programación de Robots IndustrialesnessssaNo ratings yet
- TESIScerdajacomeDocument331 pagesTESIScerdajacomeJoel Almeida100% (1)
- Morfología Del RobotDocument18 pagesMorfología Del RobotM Sc Marco Antonio Canchola100% (1)
- Metodo Paso A PasoDocument10 pagesMetodo Paso A PasoYuritzi GuarnerosNo ratings yet
- 1.5 AplicacionesDocument19 pages1.5 AplicacionesErick Perez PalaciosNo ratings yet
- Informe 1 PicDocument14 pagesInforme 1 PicClintonSemanateNo ratings yet
- Efectores y PrecisionDocument29 pagesEfectores y PrecisionEli D'KidNo ratings yet
- 8 Cinematica Robots MovilesDocument52 pages8 Cinematica Robots MovilesJavier Luna Victoria WenzelNo ratings yet
- Datos Tecnicos de Brazos RoboticosDocument9 pagesDatos Tecnicos de Brazos RoboticosAndrés MoralesNo ratings yet
- Analisis de Un Robot Manipulador Scara ARTICULODocument22 pagesAnalisis de Un Robot Manipulador Scara ARTICULOcarlos.otiniano9811No ratings yet
- Seguidor de Linea BasicoDocument10 pagesSeguidor de Linea BasicoRaul CadeteNo ratings yet
- PTT Metodo CascadaDocument13 pagesPTT Metodo CascadaSANTIAGO DAMASO RODRIGUEZ MARTINEZNo ratings yet
- Reporte de Práctica 1 - Robotica - Componentes de Un RobotDocument21 pagesReporte de Práctica 1 - Robotica - Componentes de Un RobotAlex VargasNo ratings yet
- Controladores Lógicos Programables PLCS: Msc. July Andrea Gómez CamperosDocument43 pagesControladores Lógicos Programables PLCS: Msc. July Andrea Gómez Camperosluis chaustreNo ratings yet
- Diseño y Análisis de Controladores para Un Robot de 3GDL Con Capacidad de Dibujo - Rimachi Albites PaucarDocument12 pagesDiseño y Análisis de Controladores para Un Robot de 3GDL Con Capacidad de Dibujo - Rimachi Albites PaucarMichael Rimachi100% (2)
- Robot WaiterDocument8 pagesRobot WaiterMaríaJoséJátivaYépezNo ratings yet
- Seleccion de RobotsDocument10 pagesSeleccion de RobotsJonnathan Raúl DíazNo ratings yet
- Kuka KR6 R900Document41 pagesKuka KR6 R900LUIS ALBERTO AYRA ROMERO100% (1)
- Carrito Seguidor de LuzDocument27 pagesCarrito Seguidor de LuzWakko WarnerNo ratings yet
- Toolbox Robotica en MatlabDocument35 pagesToolbox Robotica en MatlabWilliams Ayala100% (1)
- Unidad 4 - Operación y ManteniemientoDocument68 pagesUnidad 4 - Operación y ManteniemientoAlex RodríguezNo ratings yet
- 2-2) Diseño de Un Robot Autonomo PDFDocument68 pages2-2) Diseño de Un Robot Autonomo PDFJorge Luis Vargas FloresNo ratings yet
- Practica Abb 140Document5 pagesPractica Abb 140Sara Ruiz TajueloNo ratings yet
- Programacion ICSPDocument3 pagesProgramacion ICSPEdilberto CarvajalNo ratings yet
- Fanuc Módulo 1Document200 pagesFanuc Módulo 1jose romeroNo ratings yet
- Seguidor de Luz AutomatizadoDocument8 pagesSeguidor de Luz AutomatizadoAlex GonzalezNo ratings yet
- Matrices de Transformación HomogéneaDocument17 pagesMatrices de Transformación HomogéneaJhonatan Kevin OrozaNo ratings yet
- Robot Cartesiano (Final) V - 2.0Document10 pagesRobot Cartesiano (Final) V - 2.0Jose Angel JaramilloNo ratings yet
- Articulo Robot CartesianoDocument5 pagesArticulo Robot CartesianoRafa SantiagoNo ratings yet
- TransmisiÓn ArmonicaDocument29 pagesTransmisiÓn Armonicaapi-3711530100% (2)
- Robot Seguidor de LuzDocument3 pagesRobot Seguidor de LuzJulian Jose Zapata ManjarresNo ratings yet
- Control DinamicoDocument11 pagesControl DinamicoÁngeles Campaña Olmos100% (1)
- Cinemática Del RobotDocument16 pagesCinemática Del RobotGerson Siguenza DavalosNo ratings yet
- Motores PAPDocument10 pagesMotores PAPAlex Moreano ANo ratings yet
- Tipos y Características de RobotsDocument32 pagesTipos y Características de RobotsGray Kwon Fullbuster100% (1)
- Introducción A Los Robots IndustrialesDocument73 pagesIntroducción A Los Robots IndustrialesJose Antonio Mercado0% (1)
- Sensores y Servomecanismos TeoriaDocument18 pagesSensores y Servomecanismos TeoriaAldo CiMarNo ratings yet
- Delta Robot Open Source ProjectDocument5 pagesDelta Robot Open Source ProjectMiguel Castro100% (1)
- Abb RobotDocument24 pagesAbb RobotGuillermo Ramos TellezNo ratings yet
- Robot Crs A465Document3 pagesRobot Crs A465Fernando FragozoNo ratings yet
- Informe Seguidor de Linea4Document29 pagesInforme Seguidor de Linea4Fernando NancoNo ratings yet
- Seguidor de Linea Dispo555Document6 pagesSeguidor de Linea Dispo555Joseph Moreno GutierrezNo ratings yet
- Retie NTC 2050 Nfpa 70 Peligros ElectricosDocument55 pagesRetie NTC 2050 Nfpa 70 Peligros ElectricosAlejandra Pineda100% (2)
- Interruptor DiferencialDocument15 pagesInterruptor DiferencialNanny LV100% (1)
- Corriente Electrica, TeoriaDocument8 pagesCorriente Electrica, TeoriaYulzel 10No ratings yet
- 83.cable Exterior Armado Dieléctrico SM SemisecoDocument10 pages83.cable Exterior Armado Dieléctrico SM SemisecoMarco Antonio Hernandez IbarraNo ratings yet
- Mantenimiento Motor Eléctrico.Document9 pagesMantenimiento Motor Eléctrico.Marly Maria Mariano Jimenez100% (10)
- MCon DSol U-2Document2 pagesMCon DSol U-2Alexsandrí Nájera GutiérrezNo ratings yet
- Capitulo 5 Acometidas Eléctricas Cens-Norma Técnica - Cns-nt-05Document20 pagesCapitulo 5 Acometidas Eléctricas Cens-Norma Técnica - Cns-nt-05Francisco AristizabalNo ratings yet
- M.D. y E.T. Instalaciones EléctricasDocument18 pagesM.D. y E.T. Instalaciones EléctricasLuis GyNo ratings yet
- 5.-Ess 2 DocumentosDocument180 pages5.-Ess 2 DocumentosVale MartinezNo ratings yet
- Informe Malla TierraDocument23 pagesInforme Malla TierraFelipe Andres MancillaNo ratings yet
- Serie 2cp123Document14 pagesSerie 2cp123cristianNo ratings yet
- México: Pruebas A Módulos FotovoltaicosDocument31 pagesMéxico: Pruebas A Módulos FotovoltaicosDavid MorenoNo ratings yet
- MAanual Stepper Motor 42HS79-8004SDocument1 pageMAanual Stepper Motor 42HS79-8004SJhon MartinezNo ratings yet
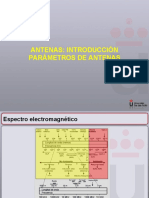
- Tema 2 - Parametros Antenas - V7Document115 pagesTema 2 - Parametros Antenas - V7William PerezNo ratings yet
- Janitza BHB Umg103 CBM Es 1Document62 pagesJanitza BHB Umg103 CBM Es 1almenargNo ratings yet
- Lectura de Planos 2020 FADCOM PDFDocument76 pagesLectura de Planos 2020 FADCOM PDFJefferson Guanoluisa SantosNo ratings yet
- Partes de Un Motor ElectricoDocument3 pagesPartes de Un Motor ElectricoGin ArmasNo ratings yet
- Control de Potencia AC Con ArduinoDocument4 pagesControl de Potencia AC Con ArduinoZenon GuzmanNo ratings yet
- 1.0 Accionamientos ElectromecánicosDocument48 pages1.0 Accionamientos ElectromecánicosLeonardo Gonzales AndradeNo ratings yet
- Práctica #6. Introducción A Los Autómatas ProgramablesDocument19 pagesPráctica #6. Introducción A Los Autómatas ProgramablesDaniel David Mantilla QuinteroNo ratings yet
- Tarea3 Rectificador Polifasico EstrellaDocument3 pagesTarea3 Rectificador Polifasico EstrellaLuis Ángel Peña GómezNo ratings yet
- Análisis Fasorial de Los Motores Síncronos Bajo DiferentesDocument13 pagesAnálisis Fasorial de Los Motores Síncronos Bajo Diferenteshugo0% (3)
- Taller 02Document4 pagesTaller 02Andres DNo ratings yet
- Informe Laboratorio Física II (Electroscopio)Document8 pagesInforme Laboratorio Física II (Electroscopio)Camilo Andres Zorro-MendozaNo ratings yet
- Diseño Eléctrico Del Área de Emergencia y Servicios Anexos para Un Hospital de Última Generación PDFDocument117 pagesDiseño Eléctrico Del Área de Emergencia y Servicios Anexos para Un Hospital de Última Generación PDFHarold Torrico SalazarNo ratings yet
- Reporte - Proyecto FINALDocument15 pagesReporte - Proyecto FINALEsteban Ramirez GuatsozonNo ratings yet
- Métodos Espectroquímicos - Parte IIDocument50 pagesMétodos Espectroquímicos - Parte IIYaniHuayguaNo ratings yet
- Pliego Bases Tecnicas1Document29 pagesPliego Bases Tecnicas1Manel SánchezNo ratings yet
- Actuadores en RobóticaDocument2 pagesActuadores en RobóticaJOSE VASQUEZ100% (1)
- Accionamientos Eléctricos - Manejo de Elementos Básicos de Accionamientos EléctricosDocument31 pagesAccionamientos Eléctricos - Manejo de Elementos Básicos de Accionamientos Eléctricosnpfh100% (1)
- Inteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroFrom EverandInteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroRating: 4 out of 5 stars4/5 (1)
- Influencia. La psicología de la persuasiónFrom EverandInfluencia. La psicología de la persuasiónRating: 4.5 out of 5 stars4.5/5 (14)
- Ciencia de datos: La serie de conocimientos esenciales de MIT PressFrom EverandCiencia de datos: La serie de conocimientos esenciales de MIT PressRating: 5 out of 5 stars5/5 (1)
- Sistema de gestión lean para principiantes: Fundamentos del sistema de gestión lean para pequeñas y medianas empresas - con muchos ejemplos prácticosFrom EverandSistema de gestión lean para principiantes: Fundamentos del sistema de gestión lean para pequeñas y medianas empresas - con muchos ejemplos prácticosRating: 4 out of 5 stars4/5 (16)
- 7 tendencias digitales que cambiarán el mundoFrom Everand7 tendencias digitales que cambiarán el mundoRating: 4.5 out of 5 stars4.5/5 (87)
- Excel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteFrom EverandExcel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteRating: 1 out of 5 stars1/5 (1)
- El trading de opciones de una forma sencilla: La guía introductoria al trading de opciones y a las principales estrategias de beneficios.From EverandEl trading de opciones de una forma sencilla: La guía introductoria al trading de opciones y a las principales estrategias de beneficios.Rating: 5 out of 5 stars5/5 (1)
- El Mom Test: Cómo Mantener Conversaciones con tus Clientes y Validar tu Idea de Negocio Cuando Todos te MientenFrom EverandEl Mom Test: Cómo Mantener Conversaciones con tus Clientes y Validar tu Idea de Negocio Cuando Todos te MientenRating: 5 out of 5 stars5/5 (8)
- Python Paso a paso: PROGRAMACIÓN INFORMÁTICA/DESARROLLO DE SOFTWAREFrom EverandPython Paso a paso: PROGRAMACIÓN INFORMÁTICA/DESARROLLO DE SOFTWARERating: 4 out of 5 stars4/5 (13)
- Guía para la aplicación de ISO 9001 2015From EverandGuía para la aplicación de ISO 9001 2015Rating: 4 out of 5 stars4/5 (1)
- Radiocomunicaciones: Teoría y principiosFrom EverandRadiocomunicaciones: Teoría y principiosRating: 5 out of 5 stars5/5 (3)
- Conquista de las Redes Sociales: 201 Consejos para Marketeros y Emprendedores DigitalesFrom EverandConquista de las Redes Sociales: 201 Consejos para Marketeros y Emprendedores DigitalesRating: 4.5 out of 5 stars4.5/5 (2)
- Electrónica básica: INGENIERÍA ELECTRÓNICA Y DE LAS COMUNICACIONESFrom EverandElectrónica básica: INGENIERÍA ELECTRÓNICA Y DE LAS COMUNICACIONESRating: 5 out of 5 stars5/5 (16)
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.From EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Rating: 4 out of 5 stars4/5 (51)
- Agile: Una guía para la Gestión de Proyectos Agile con Scrum, Kanban y LeanFrom EverandAgile: Una guía para la Gestión de Proyectos Agile con Scrum, Kanban y LeanRating: 5 out of 5 stars5/5 (1)
- Cultura y clima: fundamentos para el cambio en la organizaciónFrom EverandCultura y clima: fundamentos para el cambio en la organizaciónNo ratings yet
- Guía de aplicacion de la ISO 9001:2015From EverandGuía de aplicacion de la ISO 9001:2015Rating: 5 out of 5 stars5/5 (3)
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másFrom EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másRating: 2.5 out of 5 stars2.5/5 (3)
- 44 Apps Inteligentes para Ejercitar su Cerebro: Apps Gratuitas, Juegos, y Herramientas para iPhone, iPad, Google Play, Kindle Fire, Navegadores de Internet, Windows Phone, & Apple WatchFrom Everand44 Apps Inteligentes para Ejercitar su Cerebro: Apps Gratuitas, Juegos, y Herramientas para iPhone, iPad, Google Play, Kindle Fire, Navegadores de Internet, Windows Phone, & Apple WatchRating: 3.5 out of 5 stars3.5/5 (2)
- Python Deep Learning: Introducción práctica con Keras y TensorFlow 2From EverandPython Deep Learning: Introducción práctica con Keras y TensorFlow 2Rating: 3.5 out of 5 stars3.5/5 (5)
- Ingeniería química. Soluciones a los problemas del tomo IFrom EverandIngeniería química. Soluciones a los problemas del tomo INo ratings yet
- Aprende a Modelar Aplicaciones con UML - Tercera EdiciónFrom EverandAprende a Modelar Aplicaciones con UML - Tercera EdiciónRating: 2 out of 5 stars2/5 (1)
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaFrom EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaRating: 4.5 out of 5 stars4.5/5 (117)
- Toma de decisiones en las empresas: Entre el arte y la técnica: Metodologías, modelos y herramientasFrom EverandToma de decisiones en las empresas: Entre el arte y la técnica: Metodologías, modelos y herramientasNo ratings yet
- Manual técnico para la interpretación de análisis de suelos y fertilización de cultivosFrom EverandManual técnico para la interpretación de análisis de suelos y fertilización de cultivosRating: 4 out of 5 stars4/5 (1)