You might also like
- Chapter 3-1.power Flow Solution-Gauss SeidelDocument33 pagesChapter 3-1.power Flow Solution-Gauss Seidelfvijayami100% (1)
- Modern Electric, Hybrid Electric & Fuel Cell Vehicles - Mehrdad EhsaniDocument8 pagesModern Electric, Hybrid Electric & Fuel Cell Vehicles - Mehrdad EhsaniPunit100% (2)
- DG - Project ReportDocument23 pagesDG - Project ReportAnkit BhattNo ratings yet
- 07 Metal Oxide Semiconductor Field Effect Transistor Based Inverter With BatteryDocument50 pages07 Metal Oxide Semiconductor Field Effect Transistor Based Inverter With BatteryfvijayamiNo ratings yet
- 07 Metal Oxide Semiconductor Field Effect Transistor Based Inverter With BatteryDocument50 pages07 Metal Oxide Semiconductor Field Effect Transistor Based Inverter With BatteryfvijayamiNo ratings yet
- F4a41, F4a51, F5a51Document4 pagesF4a41, F4a51, F5a51Vadim Urupa67% (3)
- Advanced English Communication Skills LaDocument5 pagesAdvanced English Communication Skills LaMadjid MouffokiNo ratings yet
- TP 1800 DC-DC Converter For Hybrid Electric Vehicle and EV ArrowTimesDocument7 pagesTP 1800 DC-DC Converter For Hybrid Electric Vehicle and EV ArrowTimespapipapii100% (1)
- Modern Control of DC-Based Power Systems: A Problem-Based ApproachFrom EverandModern Control of DC-Based Power Systems: A Problem-Based ApproachNo ratings yet
- Generating 50Hz PWM Using PIC16F877ADocument2 pagesGenerating 50Hz PWM Using PIC16F877AZarko DacevicNo ratings yet
- Operation of DC/DC Converter For Hybrid Electric Vehicle: Atul Kumar and Prerna GaurDocument6 pagesOperation of DC/DC Converter For Hybrid Electric Vehicle: Atul Kumar and Prerna GaurAhana MalhotraNo ratings yet
- Space Vector PWM - 2Document6 pagesSpace Vector PWM - 2guanitouNo ratings yet
- Sonu 1Document19 pagesSonu 1Sonu SinghNo ratings yet
- HEVDocument40 pagesHEVVwila NyirendaNo ratings yet
- Harmonicsreduction Technique of 48 Pulse Converter With Pi Controller For Electric Vehicle Fast ChargerDocument9 pagesHarmonicsreduction Technique of 48 Pulse Converter With Pi Controller For Electric Vehicle Fast ChargerInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Wireless Charging System For EVDocument5 pagesWireless Charging System For EVShubham Raj0% (1)
- Simplified SVPWM Algorithm For VectorDocument4 pagesSimplified SVPWM Algorithm For VectorPrudhvi RajNo ratings yet
- v2g ReportDocument95 pagesv2g Reportsavita malisNo ratings yet
- Power of BatteriesDocument13 pagesPower of BatteriesancientasmNo ratings yet
- BLDCDocument6 pagesBLDCsandeep_036No ratings yet
- 5.wireless Power Transfer (WPT) Technologyusing Full-Bridge Current-Fed Topology For Medium Power ApplicationsDocument11 pages5.wireless Power Transfer (WPT) Technologyusing Full-Bridge Current-Fed Topology For Medium Power Applicationsjanga vishwanathNo ratings yet
- Design and Analysis of A Dual Input DC-DC Converter For Hybrid Electric VehicleDocument23 pagesDesign and Analysis of A Dual Input DC-DC Converter For Hybrid Electric Vehiclejanga vishwanathNo ratings yet
- Focussed Question Bank With AnswersDocument18 pagesFocussed Question Bank With AnswersHari Krishnan100% (1)
- Wireless Power Transfer For Electric Vehicle Battery Charging MiniprojectDocument20 pagesWireless Power Transfer For Electric Vehicle Battery Charging MiniprojectAlisha AnjumNo ratings yet
- Back EMF Detection Method For Sensorless Brushless DCDocument91 pagesBack EMF Detection Method For Sensorless Brushless DCnicoletabytaxNo ratings yet
- Supercapacitors: New Super Energy Storage Device: Nitin Kathuria, Assistant Professor Richa Sharma, LecturerDocument4 pagesSupercapacitors: New Super Energy Storage Device: Nitin Kathuria, Assistant Professor Richa Sharma, LecturerNitin Kathuria100% (1)
- DC To DCDocument11 pagesDC To DCsiddhartha_anirbanNo ratings yet
- Inductive Power Transfer For Transportation ApplicationsDocument24 pagesInductive Power Transfer For Transportation ApplicationsRoopini SankarNo ratings yet
- HybridDocument101 pagesHybridzinabu solomonNo ratings yet
- Three Phase Induction Motor: Simulation of Direct Torque Control ofDocument36 pagesThree Phase Induction Motor: Simulation of Direct Torque Control ofSandeep Guha Niyogi100% (1)
- DC Machine SimulationDocument12 pagesDC Machine Simulationkiranch219No ratings yet
- Tesla Cybertruck: Aerodynamic Simulation ReportDocument33 pagesTesla Cybertruck: Aerodynamic Simulation ReportVedant GoreNo ratings yet
- Implementation of An Active Battery Balancer Using Fly-Back TransformerDocument4 pagesImplementation of An Active Battery Balancer Using Fly-Back TransformerDebdeep MondalNo ratings yet
- Designing & Analysis of Supercapacitor Hybrid Battery System With Regenerative BrakingDocument10 pagesDesigning & Analysis of Supercapacitor Hybrid Battery System With Regenerative BrakingIJRASETPublicationsNo ratings yet
- Simulink Battery ModelDocument12 pagesSimulink Battery ModelnpnegociosNo ratings yet
- The Future Powertrain Portfolio C 2023 Porsche Consulting 0Document26 pagesThe Future Powertrain Portfolio C 2023 Porsche Consulting 0popov213No ratings yet
- 2021-IEEE-Feasibility of Grid-Connected Solar-Wind Hybrid System With Electric Vehicle Charging StationDocument12 pages2021-IEEE-Feasibility of Grid-Connected Solar-Wind Hybrid System With Electric Vehicle Charging StationĐỗ Văn LongNo ratings yet
- Fuel Cell 10 KW Inverter SystemDocument60 pagesFuel Cell 10 KW Inverter Systemismailbej100% (1)
- Low Cost' Three Phase To Single Phase Matrix ConverterDocument6 pagesLow Cost' Three Phase To Single Phase Matrix ConverterRaghu RamNo ratings yet
- Cuk, Sepic Zeta NptelDocument20 pagesCuk, Sepic Zeta NptelAvinash Babu KmNo ratings yet
- DSPDocument119 pagesDSPVishal SinghNo ratings yet
- Diagnostic Sales Evening Component TestingDocument124 pagesDiagnostic Sales Evening Component TestingbibNo ratings yet
- Models For A Stand-Alone PV SystemDocument78 pagesModels For A Stand-Alone PV Systemcristian2388No ratings yet
- 01 - Introduction To Multilevel InvertersDocument53 pages01 - Introduction To Multilevel Invertersp09el860No ratings yet
- Braking of DC MotorDocument18 pagesBraking of DC MotorBangariNo ratings yet
- Islanding: Prepared byDocument32 pagesIslanding: Prepared byMiGuelNo ratings yet
- Utilization of Electric PowerDocument1 pageUtilization of Electric PowerAbhimita GaineNo ratings yet
- A - Generalized - High - Gain - Multilevel - Inverter - For - Small - Scale - Solar - Photovoltaic - ApplicationsDocument15 pagesA - Generalized - High - Gain - Multilevel - Inverter - For - Small - Scale - Solar - Photovoltaic - ApplicationsJamal KhyatNo ratings yet
- DDocument2 pagesDRaj KamalNo ratings yet
- Integrated Thermal Management of Hybrid Electric VehicleDocument18 pagesIntegrated Thermal Management of Hybrid Electric VehicleSachin SinghalNo ratings yet
- Brushless Sensor ConfigDocument11 pagesBrushless Sensor ConfigAlexandru TimofteNo ratings yet
- 04493430Document7 pages04493430Krishna KarthikNo ratings yet
- Design and Analysis of On-Road Charging Electric Vehicle (OLEV)Document5 pagesDesign and Analysis of On-Road Charging Electric Vehicle (OLEV)International Journal of Innovative Science and Research TechnologyNo ratings yet
- Operation Modes For The Electric Vehicle in Smart Grids and Smart Homes - Present and Proposed ModesDocument14 pagesOperation Modes For The Electric Vehicle in Smart Grids and Smart Homes - Present and Proposed ModesWawanKharismaNo ratings yet
- Vehicle To Grid (V2G)Document16 pagesVehicle To Grid (V2G)Varun VatsNo ratings yet
- Calculation PPT For EnergyDocument12 pagesCalculation PPT For EnergyMalyaj MishraNo ratings yet
- Lab 3 Ac To DC Uson 171091054 RK23 PDFDocument8 pagesLab 3 Ac To DC Uson 171091054 RK23 PDFSon ArdmilesNo ratings yet
- FPGA Implementation of Unipolar SPWM For Single Phase InverterDocument6 pagesFPGA Implementation of Unipolar SPWM For Single Phase InverterMalay BhuniaNo ratings yet
- Design of A Real Time Smart Honking SystemDocument6 pagesDesign of A Real Time Smart Honking SystemArka MajumdarNo ratings yet
- Modeling of DC DC Converter PDFDocument6 pagesModeling of DC DC Converter PDFVishal AryaNo ratings yet
- Electric Vehicles & Hybrid Electric VehiclesDocument30 pagesElectric Vehicles & Hybrid Electric VehiclespvskrishhNo ratings yet
- Infineon-EiceDRIVER Gate Driver ICs-ProductSelectionGuide-v01 01-ENDocument84 pagesInfineon-EiceDRIVER Gate Driver ICs-ProductSelectionGuide-v01 01-ENhafizimtiazNo ratings yet
- Grid Connected Induction Generator and Self Excited Induction Generator..Document3 pagesGrid Connected Induction Generator and Self Excited Induction Generator..Sunil JainNo ratings yet
- Research and Development in Non-Mechanical Electrical Power Sources: Proceedings of the 6th International Symposium Held at Brighton, September 1968From EverandResearch and Development in Non-Mechanical Electrical Power Sources: Proceedings of the 6th International Symposium Held at Brighton, September 1968No ratings yet
- Research Article: Sensorless Speed Control of Permanent Magnet Synchronous Motors by Neural Network AlgorithmDocument8 pagesResearch Article: Sensorless Speed Control of Permanent Magnet Synchronous Motors by Neural Network AlgorithmfvijayamiNo ratings yet
- PSOC - 2 MarksDocument13 pagesPSOC - 2 MarksfvijayamiNo ratings yet
- Sustainable Energy Technologies and Assessments: Original ArticleDocument12 pagesSustainable Energy Technologies and Assessments: Original ArticlefvijayamiNo ratings yet
- Energy: Hui Liu, Chengqing Yu, Haiping Wu, Zhu Duan, Guangxi YanDocument18 pagesEnergy: Hui Liu, Chengqing Yu, Haiping Wu, Zhu Duan, Guangxi YanfvijayamiNo ratings yet
- Research On Sensorless Control System of Low Speed and High Power PMSM Based On Improved High Frequency Signal InjectionDocument6 pagesResearch On Sensorless Control System of Low Speed and High Power PMSM Based On Improved High Frequency Signal InjectionfvijayamiNo ratings yet
- PSOC Question BankDocument18 pagesPSOC Question Bankfvijayami100% (1)
- View The Esign Certificate: Allow All Pop Up'S For Continuous Esign ProcessDocument4 pagesView The Esign Certificate: Allow All Pop Up'S For Continuous Esign ProcessfvijayamiNo ratings yet
- Letter of RecommendationDocument2 pagesLetter of RecommendationfvijayamiNo ratings yet
- Experimental Study On Micro Electrochemical Machining of SS 316L Using Teaching Learning Based OptimizationDocument17 pagesExperimental Study On Micro Electrochemical Machining of SS 316L Using Teaching Learning Based OptimizationfvijayamiNo ratings yet
- Microprocessors and Microsystems: K. Thangarajan, A. SoundarrajanDocument10 pagesMicroprocessors and Microsystems: K. Thangarajan, A. SoundarrajanfvijayamiNo ratings yet
- Microprocessors and Microsystems: Ganesan R, S. Suresh, SS SivarajuDocument9 pagesMicroprocessors and Microsystems: Ganesan R, S. Suresh, SS SivarajufvijayamiNo ratings yet
- 05 Automatic Fan Control and Intensity Control by Using Microcontroller ProjectDocument39 pages05 Automatic Fan Control and Intensity Control by Using Microcontroller ProjectfvijayamiNo ratings yet
- SSR-RVS CET - PDF 1 PDFDocument351 pagesSSR-RVS CET - PDF 1 PDFfvijayamiNo ratings yet
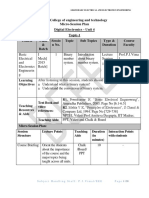
- Vimal BEEE Session Plan Unit 4 PDFDocument30 pagesVimal BEEE Session Plan Unit 4 PDFfvijayamiNo ratings yet
- Fit-Up Piping B192-5-S2Document22 pagesFit-Up Piping B192-5-S2Prathamesh OmtechNo ratings yet
- Xenon Xenalight Surgical Lighting SystemsDocument2 pagesXenon Xenalight Surgical Lighting SystemsQasim AliNo ratings yet
- IET Membership Guidance NotesDocument4 pagesIET Membership Guidance NotesKingsley InbasinghNo ratings yet
- Database Upgrade 10g To 11gDocument28 pagesDatabase Upgrade 10g To 11gSubhasis1928No ratings yet
- Whose Online Video Lectures Are Best For The IIT JEE?Document6 pagesWhose Online Video Lectures Are Best For The IIT JEE?Buzz PriyanshuNo ratings yet
- 2537 - York YCAS 690Document11 pages2537 - York YCAS 690Md JamilNo ratings yet
- Chapter 3 - Well Completion Practices PDFDocument138 pagesChapter 3 - Well Completion Practices PDFchft100% (1)
- Namibian Diplomatic Missions Abroad 2011Document6 pagesNamibian Diplomatic Missions Abroad 2011Milton LouwNo ratings yet
- The Miser'S T/R Loop Antenna: MiserlyDocument3 pagesThe Miser'S T/R Loop Antenna: MiserlyTariq ZuhlufNo ratings yet
- A Study On Welding Defects of Pressure VesselDocument24 pagesA Study On Welding Defects of Pressure Vesseladamahmad1992100% (1)
- WordFamilySorts 1Document38 pagesWordFamilySorts 1Karen simpsonNo ratings yet
- Analyzing and Securing Social Media: Cloud-Based Assured Information SharingDocument36 pagesAnalyzing and Securing Social Media: Cloud-Based Assured Information SharingakrmbaNo ratings yet
- Hard Disk Formatting and CapacityDocument3 pagesHard Disk Formatting and CapacityVinayak Odanavar0% (1)
- Diamond 53 BrochureDocument3 pagesDiamond 53 Brochuregipanaul100% (1)
- 2008 Signs of The Times and Screen Printing EngDocument12 pages2008 Signs of The Times and Screen Printing Engdeep431No ratings yet
- How Can The European Ceramic Tile Industry Meet The EU's Low-Carbon Targets A Life Cycle Perspective (Ros-Dosda - España-2018)Document35 pagesHow Can The European Ceramic Tile Industry Meet The EU's Low-Carbon Targets A Life Cycle Perspective (Ros-Dosda - España-2018)juan diazNo ratings yet
- HL780 9SDocument583 pagesHL780 9SAnonymous yjK3peI7100% (3)
- Engg Prospect1usDocument20 pagesEngg Prospect1usArun KumarNo ratings yet
- Infile StatementDocument21 pagesInfile StatementNagarjuna Parvatala100% (1)
- A Power Point Presentation On Staad - ProDocument26 pagesA Power Point Presentation On Staad - ProAbu BindongNo ratings yet
- Don't Just Lead, Govern: Implementing Effective IT GovernanceDocument20 pagesDon't Just Lead, Govern: Implementing Effective IT GovernanceWahyu Astri Kurniasari100% (1)
- Is 13687 1993Document15 pagesIs 13687 1993ADIPESHNo ratings yet
- Heat Loss and Gain CalculationDocument84 pagesHeat Loss and Gain Calculationafraz_xecNo ratings yet
- Evaluasi Keandalan PLTA Bakaru: Akbar Tanjung, Arman Jaya, Suryanto, ApolloDocument8 pagesEvaluasi Keandalan PLTA Bakaru: Akbar Tanjung, Arman Jaya, Suryanto, Apollohilda tangkeNo ratings yet
- 300Mbps/150Mbps Wireless LAN Broadband Router: Quick Installation GuideDocument2 pages300Mbps/150Mbps Wireless LAN Broadband Router: Quick Installation GuideLuis AngelNo ratings yet
- DLS RSeriesManual PDFDocument9 pagesDLS RSeriesManual PDFdanysan2525No ratings yet
- 中国铁路客运枢纽发展回顾与展望 王昊Document9 pages中国铁路客运枢纽发展回顾与展望 王昊qiqiaorongNo ratings yet
- HTTP Download - Yamaha.com API Asset File Language En&site Au - YamahaDocument5 pagesHTTP Download - Yamaha.com API Asset File Language En&site Au - Yamahaericwc123456No ratings yet