Professional Documents
Culture Documents
Ansys Workbench Optimization
Uploaded by
anmol6237Original Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Ansys Workbench Optimization
Uploaded by
anmol6237Copyright:
Available Formats
Part and Assembly Modeling with ANSYS DesignModeler 14
Huei-Huang Lee
Contents �
Contents
Preface 2 Section A. Sketching
� � � � � � � � Exercise 1a.� � Exercise 2.� Exercise 3.� Exercise 4.� � � �
5
21
� � Exercise 1.� � Arm 6
Structural Analysis of the Arm Ratchet Stop Ratchet Wheel Cover Plate 44 28 35
Section B. Part Modeling
� � Exercise 5.� � Crank 55
� � � � � � � � � � � � � � � � � � � � � � Exercise 6.� Exercise 7.� Exercise 8.� Exercise 9.� � � � �
54
64
Geneva Gear Index Yoke 72 79 Support Wheel Pipe 98
Exercise 8a.� � Exercise 10.� � Exercise 11.� � Exercise 11a.� � Exercise 12.� � Exercise 13.� � Exercise 14.� �
Structural Analysis of the Support 94 106 111
88
C-Bar Dynamometer Threaded Shaft Lifting Fork Caster Frame 124 130 119
Deformation of the C-Bar
Section C. Assembly Modeling
� � � � � � � � Exercise 16.� � Exercise 16a.� � Exercise 17.� � Exercise 17a.� � Universal Joint 152
144
� � Exercise 15.� � Threaded Shaft Assembly 145
Dynamic Simulation of the Universal Joint Clamping Mechanism 176 197 Simulation of the Clamping Mechanism 165
Section D. Concept Modeling
� � � � � � � � � � Exercise 18a.� � Exercise 19.� � Exercise 19a.� � Exercise 20.� � Exercise 20a.� �
215
219 230
� � Exercise 18.� � 2D Solid Modeling (Arm) 216
Structural Analysis of the Arm Using 2D Model Surface Modeling (Support) Line Modeling (Space Truss) 225 234 240
Structural Analysis of the Support Using Surface Model Structural Analysis of the Space Truss
2�
Preface
Preface
Use of the Book
This book is designed for those who want to learn how to create parts and assembly models using ANSYS DesignModeler. The author assumes no previous CAD/CAE experiences to begin with the book. � This book is mainly designed as an auxiliary tutorial in a course using ANSYS as a CAE platform. In particular, this book can serve as a preparation to the author's another book Finite Element Simulations with ANSYS Workbench 14, which emphasizes on nite element simulations rather than geometry modeling such that the exercises on geometry modeling (especially assembly modeling) may not be adequate.
ANSYS DesignModeler
ANSYS DesignModeler is a CAD program running under ANSYS Workbench environment. The DesignModeler can create geometries as sophisticated as any other CAD programs. Yet, many engineers choose to create geometry models using other CAD programs (e.g., Pro/Engineer, SolidWorks) and then import them into an ANSYS simulation module (such as Mechanical) for simulations. One of the reasons may be that, other than the training materials provided by the ANSYS Inc., there exist no tutorials in the bookstore. That is the main reason that I created this book. � The DesignModeler is designed specically for creating models which can be seamlessly imported into an ANSYS simulation modules (such as Mechanical). Therefore, if a geometry model is solely used for ANSYS simulations, I strongly suggest that we create the model from scratch using DesignModeler, rather than other CAD programs, to avoid any unnecessary incompatibilities.
Structure of the Book
There are 20 exercises and 8 appendices in the book; each of them is designed in a step-by-step tutorial style. The 20 exercises involve creating parts and assemblies models, while the 8 appendices show how to perform simulations using some of the models. If you are not currently interested in simulations, you may freely skip the 8 appendices without affecting the learning of the 20 exercises. � An assembly consists of two or more parts. Each part can be viewed as boolean operations (union, subtraction, etc.) of simpler 3D bodies. Each of the 3D bodies usually can be created by a two-step operation: drawing a 2D sketch on a 2D plane and then generate the 3D body by extrusion, revolution, sweeping, or skin/lofting. � The book is divided into 4 sections. Section A lets students familiarize with sketching techniques. Section B contains exercises of part modeling. Section C consists of exercises of assembly modeling. The last section introduces the creations of concept models, including 2D models, surface models, and line models. A concept model is a simplication of a 3D models, and is usually easier to create and more efcient to be simulated.
Preface �
Companion Webpage
A webpage dedicated to this book is maintained by the author: http://myweb.ncku.edu.tw/~hhlee/Myweb_at_NCKU/ADM14.html The webpage contains links to nished project les of each exercise and appendix. If everything works smoothly, you do not need them at all. Every model can be built from scratch according to the steps described in the book. The author provides these project les just in some cases you need them. For examples, if you have troubles to follow the geometry details in the textbook, you may need to look up the geometry details from the project les.
Huei-Huang Lee Associate Professor Department of Engineering Science National Cheng Kung University Tainan, Taiwan hhlee@mail.ncku.edu.tw myweb.ncku.edu.tw/~hhlee
4�
Section A. Sketching�
Section A
Sketching
An assembly is a combination of parts. From manufacture point of view, a part is a basic unit for manufacturing process. Many parts can be created by a two-step operation: drawing a 2D sketch on a plane and then generate a 3D body by extrusion, revolution, sweeping, or skin/lofting. � The exercises in Section A are designed to introduce the 2D sketching techniques provided by the DesignModeler. Each part created in Section A involves drawing a sketch and then extrude to generate a 3D solid body representing the part. � Although it can be used as a general purpose CAD software, the DesignModeler is particularly designed for creating geometric models to be analyzed (simulated) under the ANSYS environment. To let the readers understand what it means by analysis (simulation) as early as possible, an exercise (Exercise 1a) is appended right after Exercise 1 to perform a structural analysis for the part created in Exercise 1. However, the reader has option to skip Exercise 1a without affect the subsequent learning of geometric modeling.
6�
Exercise 1. Arm �
Exercise 1
Arm
1-1 Introduction
In this exercise, we will create a 3D solid model for an arm, which is a part of a clamping mechanism [1]. The clamping mechanism will be introduced in Exercise 17 and simulated in Exercise 17a. � The arm model consists of a single solid body, which can be generated by extruding a sketch by a thickness of 0.125 inches [2]. � Before creating a geometry model, we must set up a global coordinate system. For this exercise, we arbitrarily choose the global coordinate system as shown [3]. Note that the origin is on the back surface of the part. R0.313
[1] The arm is a part of a clamping mechanism.
Y 1.375
R0.313
X 3 D0.25 R0.25 [3] The global coordinate system. 2.25
[2] Details of the arm.
Unit: in. Thickness: 0.125 in.
R0.5
Exercise 1. Arm �
1-2 Start Up DesignModeler
[1] Launch ANSYS Workbench.
[2] The <Workbench GUI> (graphical user interface) shows up.
[3] Click the plus sign (+) to expand <Component Systems>. The plus sign becomes minus sign.
[7] Double-click <Geometry> to start up the DesignModeler.
[5] A <Geometry> system is created in the <Project Schematic> area.
[4] Double-click to create a <Geometry> system.
[6] You may click here to show the messages from ANSYS Inc. To hide the message, click it again.
8�
Exercise 1. Arm �
[8] <DesignModeler GUI> shows up.
[9] Select <Inch> as length unit.
[10] Click <OK>. Note that, after clicking and entering DesignModeler, the length unit cannot be changed anymore.
Speech Bubbles
1. In this book, each exercise is divided into subsections (e.g., 1-1, 1-2). In each subsection, speech bubbles are ordered with numbers, which are enclosed by pairs of square brackets (e.g., [1], [2]). When you read, please follow the order of speech bubble; the order is signicant. 2. The square-bracket numbers also serve as reference numbers when referred in other text. When in the same subsection, we simply refer to a speech bubble by its number (e.g., [1], [2]). When in the other subsections, we refer to a speech bubble by its subsection identier and its bubble number (e.g., 1-2[1]). 3. When a circle is used with a speech bubble, it is to indicate that mouse or keyboard ACTIONS are needed in that step [1, 3, 4, 7, 9, 10]. A circle may be lled with white color [1, 4, 7] or unlled [3, 9, 10]. A speech bubble without a circle [2, 8] or with a rectangle [6] is used for commentary only, i.e., no mouse or keyboard actions are needed.
Workbench Keywords
A pair of angle brackets is used to highlight an Workbench keyword (e.g., <Component Systems> in [3]). Sometimes, if the angle brackets do not add any clarity, they may be dropped (e.g., DesignModeler).
Clicking and Selecting
When we say "click" or "select," we mean left-click the mouse button.
Exercise 1. Arm �
1-3 Prepare to Draw a Sketch on <XYPlane>
[1] By default, <XYPlane> is the current sketching plane (active plane).
[3] Click <Look At Face/Plane/ Sketch> to rotate the view angle so that you look at the current sketching plane.
[2] Click to switch to <Sketching Mode>. Note that there are 5 toolboxes available: Draw, Modify, Dimension, Constraints, and Settings. <Draw> is the default toolbox. [4] By default, the ruler is on. In the next step, we will turn off the ruler to make more sketching space.
[6] This is the global coordinate system.
[5] Select <View/ Ruler> to turn it off. For the rest of this book, we always leave the ruler off.
[7] This is the plane (local) coordinate system.
10�
Exercise 1. Arm �
1-4 Draw a Circle with Dimension
[6] As soon as you begin to draw, a name is assigned to the sketch and it becomes the active sketch. [5] Move the mouse away from the center and then click the mouse to create a circle with arbitrary radius.
[1] Select <Circle> tool.
[7] Select <Dimension> toolbox.
[2] In case you don't see the <Circle> tool, scroll down to reveal the tool.
[4] Move the mouse around the origin until a <P> (Point) appears and then click the mouse to locate the center of the circle. The ability to "snap" a point is a feature of the DesignModeler, called <Auto Constraints>.
[3] It gives you hints for using the tool.
[11] It is possible that the circle becomes too small. Select <Zoom to Fit> tool to t the sketch into the graphics window. Now, we may need to adjust (move) the position of the dimension.
[8] Select <Diameter> tool.
[10] In the <Details View>, type 0.25 for the diameter.
[9] Select the circle, move the mouse outward, and then click to create a dimension. Note that the circle turns blue, meaning the circle has fully constrained (xed in the space).
Exercise 1. Arm �
11
[14] Whenever necessary, select <Zoom to Fit> tool to t the sketch into the graphics window. [12] Select <Move> tool. Remember to scroll down to reveal a tool if you don't see the tool.
[13] Select the dimension, move to a suitable position, and then click again.
[15] Select <Display> tool. You may need to scroll down to reveal the tool if you don't see the tool.
[17] Instead of displaying dimension name, now the dimension value is displayed. For the rest of the book, we always display dimension values instead of name.
[16] Click <Name> to turn the dimension name off. Note that <Value> automatically turns on.
12�
Exercise 1. Arm �
1-5 Draw Two More Circles
[2] Select <Draw> toolbox.
[1] Click anywhere in the graphics window and then scroll the mouse wheel down to zoom out the sketch roughly like this.
[4] Move the mouse around the horizontal axis until a <C> (Coincident) appears and then click the mouse to locate the center of the circle. This center is snapped on the horizontal axis.
[5] Move the mouse until an <R> (Radius) appears and then click the mouse. The radius dimension is constrained to be the same as the rst circle. Note that the circle is greenish-blue, meaning it is not fully xed in the space yet. A horizontal location is needed to fully dened the circle.
[3] Select <Circle> tool.
[6] Create another circle in a similar way. Make sure a <C> and an <R> appear before clicking. A vertical location is needed to fully dened the circle.
Exercise 1. Arm �
13
[8] Select the vertical axis. Note that the shape of the mouse cursor changes when your mouse is on the axis.
[12] Remember that you always can use <Zoom to Fit> and scroll the mouse wheel [1] to zoom in/out the view. Also, to "pan" the view, simply move the mouse while holding the control-middle-button. [10] Move the mouse upward roughly here and click to locate a horizontal dimension. Note that the circle turns blue (fully constrained).
[7] Select <Dimension> toolbox and then select <Horizontal> tool. [11] In the <Details View>, type 1.375 for the horizontal dimension.
[9] Select the center of the circle. Note that the shape of the mouse cursor changes when your mouse is on the point.
[13] Select <Vertical> tool.
[16] Before going further, make sure you familiarize the two most frequently used view operations: scrolling the mouse wheel to zoom in/out the view and moving mouse with control-middle-button to pan the view.
[15] In the <Details View>, type 2.25 for the vertical dimension.
[14] Select horizontal axis, select the center of the lower circle, move the mouse leftward roughly here, and click to locate a vertical dimension. The circle turns blue.
14�
Exercise 1. Arm �
1-6 Draw Three Concentric Circles
[2] Select the <Dimension/ Radius> tool, and create a radius dimension for the circle. In the <Details View>, type 0.313 for the radius.
[1] Select the <Draw/ Circle> tool, and draw a concentric circle. Make sure a <P> appears before dening the center.
[4] With the <Draw/Circle> tool still selected, draw a concentric circle. Make sure a <P> appears before dening the center.
[3] Select the <Draw/Circle> tool, and draw a concentric circle with the same radius as the previous circle. Make sure a <P> appears before dening the center and an <R> appears before dening the radius.
[5] Select the <Dimension/ Radius> tool, and create a radius dimension for the circle. In the <Details View>, type 0.5 for the radius.
Exercise 1. Arm �
15
1-7 Draw Tangent Lines
[1] Select the <Draw/Line by 2 Tangents> tool, and then select the two circles to be tangent to. A tangent line is created.
[2] Create additional three tangent lines in a similar way.
16�
Exercise 1. Arm �
1-8 Draw a Fillet
[1] Select the <Modify/ Fillet> tool, and type 0.25 for <Radius>.
[2] Select these two lines. A llet is created. Note that the llet is not bluecolored. We need to specify the radius. The radius typed in [1] is not necessarily the nal dimension; it just serves as a default dimension.
[3] Select the <Dimension/Radius> tool, and create a radius dimension for the llet. You don't need to type in the <Details View>, since the default value [1] is automatically used. Note that the color turns blue now.
Exercise 1. Arm �
17
1-9 Trim Away Unwanted Segments
[1] Select the <Modify/ Trim> tool, and turn on <Ignore Axis>, meaning that the axes will not serve as trimming tools. [3] Click to trim away two other arcs.
[2] Click the circle roughly here to trim away the arc. Note that when you select an edge (a line or a curve), the remaining edges will serve as trimming tools.
[4] The sketch after trimming.
18�
Exercise 1. Arm �
1-10 Extrude the Sketch to Create the Arm
[1] Select <Extrude> tool. [6] Click <Generate> to produce a 3D solid body.
[7] Click <Display Plane> to turn off the display of XYPlane (and the sketches it contains).
[2] It automatically switches to <Modeling Mode>, in which a <Tree Outline> is displayed, which will be explained later.
[3] Click the little cyan sphere to rotate the view into an isometric view.
[4] Type 0.125 for the <Depth>.
[5] The active sketch is automatically taken as <Geometry>.
1-11 Save the Project and Exit Workbench
[2] In the <Workbench GUI>, save the project as "Arm."
[1] Select <File/Close DesignModeler>. The <DesignModeler GUI> disappears.
[3] Select <File/ Exit> to quit from the Workbench.
Exercise 1. Arm �
19
1-12 Review
Global Coordinate System
Before creating a geometry model, you must set up a global coordinate system (1-1[3], 1-3[6]).
Workbench GUI
In the <Workbench GUI> (1-2[2]), you can create a system (1-2[4]) and start up DesignModeler (1-2[7]). Other capabilities will be introduced later.
Project Schematic
Created systems appear on the <Project Schematic>, an area in the <Workbench GUI>.
DesignModeler GUI
Geometries are created entirely within the <DesignModeler GUI> (1-2[8]).
Length Unit
Before creating a model in the DesignModeler, you must choose a length unit (1-2[9, 10]). The length unit cannot be changed thereafter.
Mouse Operations
Click �� � -- � Left-click the mouse button. Select� � -- � Left-click the mouse button. Double-Click� -- � Left-click the mouse button twice. Zoom In/Out� -- � Scroll the mouse wheel Pan� � � -- � Move the mouse while holding control-left-button. Other mouse operations will be introduced later.
Current Sketching Plane
Each sketch is stored in the current sketching plane (1-3[1]). Manipulating (switching, creating, etc.) sketching planes will be introduced later.
Sketching Mode v.s. Modeling Mode
Tools for sketching are provided in the <Sketching> mode (1-3[2]), while tools for creating and manipulating bodies are provided in the <Modeling> mode (1-10[2]). There are 5 toolboxes available: Draw, Modify, Dimension, Constraints, and Settings. Tools in <Modeling> mode includes <Extrude> (1-10[1]). Some tools are available in both modes, e.g., <Zoom To Fit> (1-4[11]).
Look At Face/Plane/Sketch
Clicking this tool to rotate the view angle so that you look at the current sketching plane (1-3[3]).
Ruler
The ruler (1-3[4, 5]) is to help you obtain a better feeling of the drawing scale. In this book, we always leave the ruler off to make more sketching space.
Plane Coordinate System
Every plane has its own coordinate system (1-3[7]); it is also called a local coordinate system. The plane coordinate system will be explained further later.
20�
Exercise 1. Arm �
Scrolling
In case you don't see a tool in a toolbox, scroll down/up to reveal the tool (1-4[2]). There is also a scrolling controller for the <Details View>.
Tools in <Draw> Toolbox
Circle � � � Line by 2 Tangent� -- Draw a circle, giving the center and the radius (1-4[1, 3-5]). -- Draw a line tangent to two curves (including circles and arcs) (1-7[1, 2]).
Tools in <Dimension> Toolbox
Radius � � Move�� � Display� � � � � Horizontal�� � � � Vertical� � � � � -- � -- � -- � � -- � � -- � � Specify a radius dimension by selecting a circle (1-4[6, 8-10]) or an arc (1-8[2]). Move (relocate) a dimension name/value by dragging the name/value (1-4[12, 13]). This tool is to toggle the display of dimension name and the dimension value (1-4[15-17]). In this book, we always turn off the dimension name and turn on the dimension value. Specify a horizontal dimension by rst selecting a or a point (or a vertical line) and then a second point (or a vertical line) (1-5[7-10]). Specify a vertical dimension by rst selecting a or a point (or a horizontal line) and then a second point (or a horizontal line) (1-5[13, 14]).
Tools in <Modify> Toolbox
Fillet� � Trim � � -- � -- � Create a llet by selecting two lines or curves (1-8[1-3]). Trim away unwanted segments (1-9[1-4]).
Auto Constraints
P� -- � The mouse cursor snaps to a point (or the origin) (1-4[4]). R� -- � The radius is the same as another circle (or arc) (1-4[5]). C� -- � The mouse cursor is coincident to a line (or an axis) (1-5[4, 6]). Other auto constraint features will be introduced later.
Color Codes
Greenish-blue� -- � Blue � � � -- � Red� � � -- � Under-constrained (1-8[2]) Fully constrained (xed in the space) (1-4[9], 1-5[10,14]). Over-constrained
Zoom To Fit
Click this tool to t the entire sketch (in the <Sketching> mode) or entire model (in the <Modeling> mode) into the graphics window (1-4[14]).
Extrude
This tool extrude a sketch by a specied depth to create a 3D body (1-10[1-5]). More exercises will be given later.
Isometric View
Click the little cyan sphere of the triad will rotate the view into an isometric view (1-10[3]). Other view controls will be introduced later.
Display Plane
This tool is to toggle the display of current sketching plane and the sketches it contains (1-10[6]).
Exercise 1a. Structural Analysis of the Arm �
21
Appendix:
Exercise 1a
Structural Analysis of the Arm
1a-1 Introduction
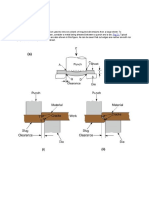
Although it can be used as a general purpose CAD software, the DesignModeler is particularly designed for creating geometric models to be analyzed (simulated) under the ANSYS environment. The purpose of this exercise is to let the readers understand what it means by analysis (simulation). However, the reader has option to skip this exercise without affect the subsequent learning of geometric modeling. � In this exercise, we will perform a static structural analysis for the arm created in Exercise 1. The objective is to nd the deformation and stresses under the working loads. � The clamping mechanism is entirely made of steel and is designed to withstand a clamping force of 450 lbf [1]. After a structural analysis of the entire mechanism [2] (also see Exercise 17a), the results show shows that, to withstand a clamping force of 450 lbf, the arm is subject to external forces as shown [3] (also see 17a-13). Note that the external forces are in a state of static equilibrium. � The analysis for the entire clamping mechanism will be perform in Exercise 17a. In this exercise, we will only perform a analysis on the arm. The purpose is to make sure the stresses are within the allowable stress of the steel, which is 30,000 psi. � The analysis task cannot not be performed in DesignModeler. Rather, it is carried out with <Mechanical>, another Workbench application program. [2] This is the deformed structure under the design loads. The wireframe is the underformed conguration. Note that, for visual effects, the deformation has been exaggerated.
281 lbf
126 lbf
[1] The clamping mechanism is designed to withstand a clamping force of 450 lbf.
264 lbf
187 lbf
[3] The external forces on the arm. These forces are calculated according to 17a-13.
77 lbf
407 lbf
22�
Exercise 1a. Structural Analysis of the Arm
1a-2 Start Up <Mechanical>
[1] Launch ANSYS Workbench.
[2] Open the project "Arm," which was saved in Exercise 1.
[3] Double-click to create a <Static Structural> analysis system.
[5] And drop here. A link is created, indicating that both <Geometry> share the same data.
[4] Drag <Geometry>...
[6] Double-click to start up the <Mechanical>.
Exercise 1a. Structural Analysis of the Arm �
23
[7] This is the <Mechanical> GUI. Note that the model is automatically brought into <Mechanical>. By default, the body is assumed to be made of steel.
[8] Make sure the length unit is <in.>. If not, select the right unit from the pull-down menu <Units> (see [9]).
[9] If the length unit is not <in.>, select <Units/U.S. Customary (in, lbm, lbf, F, s,V, A)>. Unlike DesignModeler, the units can be changed any time as you like in <Mechanical>.
24�
Exercise 1a. Structural Analysis of the Arm
1a-3 Specify Loads
[2] Select <Loads/ Force>.
[3] A <Force> object is inserted under the <Static Structural> branch.
[1] Click to highlight <Static Structural>.
[4] Select this cylindrical face.
[5] Click <Apply>.
[6] Select <Components>.
[7] Type -187 (lbf) for <X Component>, and 126 (lbf) for <Y Component>.
[8] Select <Loads/ Force> again.
[9] A <Force 2> object is inserted. [10] Select this cylindrical face. [11] Click <Apply>. [12] Select <Components>.
[13] Type 264 (lbf) for <X Component>, and 281 (lbf) for <Y Component>.
Exercise 1a. Structural Analysis of the Arm �
25
1a-4 Specify Supports
[1] Select <Supports/ Fixed Support>.
[2] A <Fixed Support> is inserted.
[3] Select this cylindrical face.
[4] Click <Apply>.
1a-5 Insert Result Objects
[2] Select <Stress/ Equivalent (von-Mises)>.
[1] Click to highlight <Solution>.
[3] A solution object is inserted under the <Solution> branch.
26�
Exercise 1a. Structural Analysis of the Arm
1a-6 Solve the Model
[1] Click <Solve>.
[4] Select <Edges/ Show Undeformed WireFrame>.
[3] The maximum stress is 29,690 psi, slightly below the allowable stress (30,000 psi). Note that the maximum stress can be reduced by increasing the radius of the llet.
[6] For visual effect, the deformation is automatically enlarged 49 times.
[5] Undeformed shape. [2] Click the Z-axis to rotate the view so that you look into the <XYPlane>.
[7] Click to close the <Message> window.
[8] Click <Play> to animate the deformation.
[9] Click <Stop> to stop the animation.
Exercise 1a. Structural Analysis of the Arm �
27
1a-7 Save the Project and Exit Workbench
[2] In the <Workbench GUI>, save the project as "Arm-a".
[1] Select <File/Close Mechanical>. The <Mechanical GUI> disappears.
[3] Select <File/ Exit> to quit from the Workbench.
28�
Exercise 2. Ratchet Stop �
Exercise 2
Ratchet Stop
2-1 Introduction
The ratchet stop is used to control a ratchet wheel so that the ratchet wheel rotates in a certain direction only [1, 2]. The ratchet wheel will be created in Exercise 3. In this exercise, we'll create a 3D solid model for the ratchet stop. � The details of the ratchet stop are shown in the gure below [3]. Note that the coordinate system is also shown in the gure.
[1] The ratchet wheel.
[2] The ratchet stop is used to control the rotational direction of the ratchet wheel.
R0.56
p: Slo 40
�
Y [3] Details of the ratchet stop.
0.125
0.1
X R0.34 Unit: in. Thickness: 0.125 in.
R0.188 0.57
Exercise 2. Ratchet Stop �
29
2-2 Start Up DesignModeler
[1] Launch ANSYS Workbench and create a <Geometry> system (1-2[1-5]).
[2] Double-click <Geometry> cell to start up the DesignModeler. Select <Inch> as the length unit (1-2[9, 10]).
2-3 Draw a Circle on XYPlane
[3] Draw a circle centered at the plane origin (1-4[1-5]).
[2] Rotate to XYPlane view (1-3[3])
[1] Switch to <Sketching Mode> (1-3[2]).
[4] Select <Dimension/Radius> tool and specify a radius of 0.188 (in.) for the circle. Remember to turn on the display of dimension value (1-4[15-17]). Also remember to use <Dimension/Move> to move the dimension to a suitable position (1-4[12, 13]).
30�
Exercise 2. Ratchet Stop �
2-4 Draw a Line
[5] The line is not bluecolored, meaning it isn't fully dened in the space yet. We now specify an angle dimension for the line.
[2] Select <Dimension/General> tool and create a length dimension by simply selecting the line segment and move the mouse upward. Specify a dimension value of 0.16 (in.).
[1] Select <Draw/ Line> tool and draw a line roughly like this. [4] Select <Dimension/ Vertical> tool and specify a vertical dimension of 0.125 (in.) (1-5[13-15]).
2-5 Specify an Angle Dimension
[1] To specify an angle dimension, you need to select two lines (or axes). When you select a line (or axis), the end near where you click become the "arrow end" of the line. The angle is then measured from the rst line to the second line in a counter-clockwise fashion.
[3] Select <Dimension/Horizontal> tool and specify a horizontal dimension of 0.57 (in.) (1-5[7-11]).
[3] Click the line here near the upper-right end.
[2] Select <Dimension/ Angle> tool and then click the X-axis on the positive side.
[4] Click here to create an angle dimension. Type 40 (degrees) in the <Details View>. Note that the angle is measured counterclockwise from the rst line to the second. Also note that the line is blue-colored now.
[5] If you made mistakes (click on wrong ends or in a wrong order) and the angle is not what you meant, right-click anywhere in the graphics window to bring up a <Context Menu> and choose <Alternate Angle>. Repeat this before you click to locate the angle dimension until the correct angle appears.
Exercise 2. Ratchet Stop �
31
2-6 Draw Arcs
[2] Click the upperright end of the line to dene an end of the arc. [4] An arc is created.
[3] Click to dene another end roughly here on the circle.
[1] Select <Draw/Arc by Center> tool and then click roughly here to dene the center. [5] Select <Dimension/ Radius> tool and specify a radius dimension of 0.56 in.
[6] Select <Constraints/ Tangent> tool and then select the arc and the circle. A <Tangent> constraint is imposed between the arc and the circle. Note that the arc turns blue.
[7] Also note that the center of the arc moves to a new location to accommodate the constraint.
32�
Exercise 2. Ratchet Stop �
[9] Click the lowerleft end of the line to dene an end of the arc.
[10] Click to dene another end roughly here on the circle. [8] Select <Draw/Arc by Center> tool again and dene the center roughly here.
[11] Select <Dimension/ Radius> tool and specify a radius dimension of 0.34 in.
[12] Select <Constraints/ Tangent> tool and impose a <Tangent> constraint between the newly created arc and the circle.
Exercise 2. Ratchet Stop �
33
2-7 Trim Away Unwanted Segments
[1] Select <Modify/Trim> tool and make sure <Ignore Axis> is turned on (1-9[1]). Click here to trim away the arc segment.
[2] The nished sketch.
2-8 Extrude the Sketch to Create the Ratchet Stop
[1] Extrude the sketch 0.125 in. to create the ratchet stop (1-10[1-6]).
Wrap Up
Close DesignModeler, save the project as "Stop," and exit the Workbench (1-11[1-3]).
34�
Exercise 2. Ratchet Stop �
2-9 Review
Context Menu
When you right-click the mouse, a menu pops up. The contents of the menu depends on when and where you right-click the mouse. The menu is thus called the <Context Menu> (2-5[5]). Try to right-click anywhere in the graphics area, <Details View>, or <Tree Outline> (1-10[2]), to see the contents of the <Context Menu>.
<Dimension/General> Tool
This tool can be used for any type of dimension. For a line, the default is to create a <Length> dimension (2-4[2]). For a circle or arc, the default is to create a diameter dimension. If the default is not what you want, right-click anywhere in the graphics window to bring up the <Context Menu> [1] and choose a dimension type.
<Dimension/Angle> Tool
To specify an angle dimension, you need to select two lines (or axes). When you select a line (or axis), the end near where you click become the "arrow end" of the line. The angle is then measured from the rst line to the second line in a counter-clockwise fashion (2-5[1-4]). � If you made mistakes (click on wrong ends or in a wrong order) and the angle is not what you meant, right-click anywhere in the graphics window to bring up the <Context Menu> [2] and choose <Alternate Angle>. Repeat this until the correct angle appears before you click to locate the angle dimension (2-5[5]).
[1] This is the <Context Menu> when <Dimension/General> is activated.
<Draw/Line> Tool
This tool draws a line by dening two end points (2-4[1])).
<Draw/Arc By Center> Tool
This tool draws an arc by dening its center and two end points (2-6[1-4]).
<Constraints/Tangent> Tool
This tool impose a <Tangent> constraint between two curves or between a line and a curve (2-6[6, 12]).
[1] This is the <Context Menu> after you select two lines (or axes) and before you click to create an angle dimension.
Exercise 3. Ratchet�
35
Exercise 3
Ratchet Wheel
3-1 Introduction
In this exercise, we'll create a 3D solid model for the ratchet wheel mentioned in Exercise 2 [1]. The details of the ratchet wheel are shown in the gure below [2].
[1] The ratchet wheel.
60 �
15
�
[2] Details of the ratchet wheel. 1.00 X
D0.25
Unit: in. Thickness: 0.25 in.
36�
Exercise 3. Ratchet
3-2 Start Up DesignModeler
[1] Launch ANSYS Workbench and create a <Geometry> system.
[2] Double-click <Geometry> cell to start up the DesignModeler. Select <Inch> as the length unit.
3-3 Draw Two Concentric Circles
[1] On XYPlane, draw two concentric circles with diameters of 0.25 in. and 1.00 in. respectively.
Exercise 3. Ratchet�
37
3-4 Draw Lines with Angle Dimensions
[1] Draw a line passing the origin like this. [2] Specify an angle dimension of 15 degrees. Remember to select the line rst and then the axis. Clicking positions are also important (2-5[1-5]).
[3] Draw another line like this. [4] Specify an angle dimension of 60 degrees.
38�
Exercise 3. Ratchet
3-5 Trim Away Unwanted Segments
[1] Draw a circle which passes through an end point of the line. When you dene the radius, remember to snap (with a <P> constraint) the end point of the line. The circle serves as a construction (temporary) circle.
[3] After trimming, a single tooth remains.
[2] Trim away unwanted segments. Remember to turn on <Ignore Axis> (1-9[1]).
Exercise 3. Ratchet�
39
3-6 Duplicate Teeth
[2] Select these two lines. To select multiple entities, hold Control key while click the entities sequentially. You also can "sweep select" multiple entities, i.e., holding left mouse button while sweep through the entities. After the selection, the entities are highlighted with yellow color.
[1] Select <Modify/Copy>.
[3] Right-click anywhere in the graphics window to bring up the <Context Menu>, and select <End/Use Plane Origin as Handle>. Now the tooth has been copied to a "clipboard."
[4] The <Modify/Paste> tool is automatically activated. Type 15 (degrees) for the <r>, meaning that the rotating angle is 15 degrees.
40�
Exercise 3. Ratchet
[5] Bring up the <Context Menu>, and select <Rotate by -r Degrees>. Note that a negative angle is to rotate clockwise.
[6] Bring up the <Context Menu> again, and select <Paste at Plane Origin>.
[7] The tooth is rotated 15 degree clockwise (using plane origin as center of rotation) and pasted. [8] Repeat steps [5, 6] four more times. Press <Esc> to end the tool or choose <End> from the <Context Menu>.
Exercise 3. Ratchet�
41
[9] Select <Modify/ Copy> again, and select all the teeth, using "sweep select" [2]. From the <Context Menu>, select <End/Use Plane Origin as Handle> [3].
[10] Type 90 (degrees) for the rotating angle.
[11] Repeat steps [5, 6].
[12] Repeat steps [5, 6] two more times. Press <Esc> to end the tool or choose <End> from the <Context Menu>.
42�
Exercise 3. Ratchet
3-7 Extrude the Sketch to Create the Ratchet Wheel
[1] Extrude the sketch 0.25 in. to create the ratchet wheel.
Wrap Up
Close DesignModeler, save the project as "Ratchet," and exit the Workbench.
Exercise 3. Ratchet�
43
3-8 Review
Selection of Multiple Entities
There are several ways to select multiple entities. Two of them are <Control-Select> and <Sweep Select>. � Control-Select� --� Click the entities sequentially while holding the Control key. � Sweep Select� --� Hold the left mouse button and sweep through the entities. � Box Select�� --� Select <Select Mode/Box Select> [1], and use mouse to dene a box. � � � � � All entities inside the box are selected.
[1] One way to select multiple entities is to turn on <Select Model/ Box Select>.
<Modify/Copy> and <Modify/Paste> Tools
<Modify/Copy> copies the selected entities to a "clipboard." A <Paste Handle> must be specied using one of the methods in the <Context Menu> (3-6[3]). After completing the <Copy> tool, the <Paste> tool is automatically activated. � <Modify/Paste> pastes the entities in the "clipboard" to the graphics window. The pasting location corresponds to the <Paste Handle> specied in the <Copy> tool. To dene the pasting location, you either click on the graphics window or choose from the <Context Menu> (3-6[6]). Many options also can be chosen from the <Context Menu> (3-6[5]), where the rotating angle <r> and the scaling factor <f> can be specied with the tool (3-6[4]). A positive rotating angle is to rotate counter-clockwise.
<Modify/Replicate> Tool
<Replicate> is equivalent to a <Copy> followed by a <Paste>.
Ending a Tool
You can press <Esc> to end a tool (3-6[8, 12]). Besides, the <Context Menu> often provides an <End> option to end a tool (3-6[5, 6]).
44�
Exercise 4. Cover Plate�
Exercise 4
Cover Plate
4-1 Introduction
In this exercise, we'll create a 3D solid model for a cover plate, of which the details are shown in the gure below [2].
2 R0.188
2 D0.201
0.376 0.312 0.312
0.25
8 R0.15
6 R0.06 0.75
0.25
1.25
[1] Details of the cover plate.
2.00
X Unit: in. Thickness: 0.046 in. 0.562 1.50
Exercise 4. Cover Plate �
45
4-2 Start Up DesignModeler
[1] Launch ANSYS Workbench and create a <Geometry> system.
[2] Double-click <Geometry> cell to start up the DesignModeler. Select <Inch> as the length unit.
4-3 Draw Circles
[2] Draw another circle with the same diameter. Make sure an <R> appears when you dene the radius (1-5[5]).
[3] Use <Dimension/ Horizontal> to specify a dimension of 0.376 in.
[4] Use <Dimension/ Vertical> to specify a dimension of 2 in.
[1] On XYPlane, draw a circle centered at the origin and with a diameter of 0.201 in.
46�
Exercise 4. Cover Plate�
[6] Draw a concentric circle with the same radius. Make sure an <R> appears when you dene the radius.
[5] Draw a concentric circle with a radius of 0.188 in.
4-4 Draw Rectangles and Lines
[1] Select <Draw/ Rectangle> and draw a rectangle with dimensions a shown.
Exercise 4. Cover Plate �
47
[2] Select <Draw/Polyline> and draw three segments like this. Select <Open End> from the <Context Menu> after you dene the fourth point. Note that the three segments are either horizontal or vertical, therefore make sure an <H> or a <V> appears before clicking. Specify the dimensions as shown.
[4] Trim away this extra segment. [3] Select <Draw/Line> again and draw a line like this. Note that the two end points coincide with the Y-axis. [5] Trim away this extra segment.
48�
Exercise 4. Cover Plate�
[7] Trim away this segment. [6] Use <Draw/Line> again to draw a vertical line and specify a horizontal dimension as shown.
[8] Trim away this segment.
[9] Trim away this segment.
Exercise 4. Cover Plate �
49
4-5 Draw Fillets
[2] Create 6 llets with the same radius (1-8 [2]).
[1] Select <Modify/Fillet> and type 0.06 (in.) for the <Radius>.
[3] Create a radius dimension for anyone of the llets (1-8[3]).
[5] Create 4 llets with the same radius.
[4] Select <Modify/Fillet> again and type 0.15 (in.) for the <Radius>.
50�
Exercise 4. Cover Plate�
[6] With <Modify/Fillet> tool still activated, create this llet by clicking the horizontal line and the circle. Note that the horizontal line is automatically trimmed.
[7] Repeat the last step to create this llet.
[8] Use <Draw/Line> to re-create the trimmed segment.
[9] Repeat the last step to re-create this line.
Exercise 4. Cover Plate �
51
[12] Create a radius dimension for anyone of the 8 llets.
[10] Use <Modify/ Fillet> to create this llet (with the same radius as before) by clicking the horizontal line and the circle.
[11] Repeat the last step to create this llet.
4-6 Trim Away Unwanted Segments
[1] Select <Modify/ Trim> and turn on <Ignore Axis>, then trim away this segment.
[2] And this segment.
52�
Exercise 4. Cover Plate�
[3] The nal sketch.
4-7 Extrude the Sketch to Create the Cover Plate
[1] Extrude the sketch 0.046 in. to create the cover plate.
Wrap Up
Close DesignModeler, save the project as "Cover," and exit the Workbench.
Exercise 4. Cover Plate �
53
4-8 Review
<Draw/Rectangle>
Draws a rectangle by dening two diagonally opposite points. The edges of the rectangle are either horizontal or vertical. To draw a rectangle at an arbitrary orientation, please use <Draw/Rectangle by 3 Points>.
<Draw/Polyline>
This tool allows you to draw a series of connected lines, called a polyline. The polyline can be closed or open. After dening the last point, choose <Open End> or <Closed End> from the <Context Menu>.
Auto Constraints
H� V� --� --� Horizontal Vertical
Note:
For a comprehensive description of sketching tools, please refer to the following ANSYS on-line reference: ANSYS Help System//DesignModeler User Guide//2D Sketching
54�
Section B. Part Modeling�
Section B
Part Modeling
As mentioned in the opening of Section A, many parts can be created by a two-step operation: drawing a 2D sketch on a plane and then generate a 3D body by extrusion, revolution, sweeping, or skin/lofting. � A more complicated part often can be viewed as a series of the two-step operations; each two-step operation either add material to the existing body or cut material from the existing body. The exercises in Section B are designed to introduce the 3D modeling techniques for more complicated parts.
Exercise 5. Crank �
55
Exercise 5
Crank
5-1 Introduction
In this exercise, we'll create a 3D solid model for a crank, of which the details are shown in the gure below. Note that a global coordinate system is set up and shown in the gure. � The crank model can be viewed as a series of three two-step operations; each involves drawing a sketch on XYPlane and then extrude the sketch to generate a material. The materials are either add to the existing body or cut from the existing body.
Y 2 D10 2 R10
Unit: mm.
75
R10
R22 D30 D20 65 20 8
56�
Exercise 5. Crank
5-2 Start Up DesignModeler
[3] Select <Millimeter> as the length unit. [1] Launch ANSYS Workbench and create a <Geometry> system.
[2] Double-click <Geometry> cell to start up DesignModeler.
5-3 Draw a Sketch on XYPlane
[1] On XYPlane, draw 5 circles and 4 tangent lines (using <Draw/Line by 2 Tangents>) like this. Specify the dimensions.
Exercise 5. Crank �
57
[3] Trim away these three arc segments.
[2] Use <Modify/ Fillet> to draw a llet with a radius of 10 mm.
58�
Exercise 5. Crank
5-4 Extrude to Create a Solid Body
[1] The active plane. [2] The active sketch.
[9] Click <Generate>. [3] Click <Extrude>. [5] An <Extrude1> object is inserted in the model tree. [4] It automatically switches to <Modeling Mode>. [8] Click the small cyan sphere to rotate the view into an isometric view.
[10] Click <Display Plane> to turn off the plane display.
[6] Click <Apply>. The active sketch is automatically taken for <Geometry>.
[7] Type 8 (mm) for <Depth>. [11] The <Tree Outline> displays a tree structure for the geometry model, called <Model Tree>. [13] Under the XYPlane, we've created a sketch (Sketch1)
[14] The <Extrude1> uses <Sketch1> as the base geometry. [12] Click all the plus signs <+> to expand the model tree.
[15] This is the body we've created so far.
Exercise 5. Crank �
59
5-5 Create a New Sketch on XYPlane
[2] A new sketch (Sketch2) is created. Note that, for the rst sketch of a plane, you don't need to explicitly click <New Sketch>. However, for additional sketches on the same plane, you need to click <New Sketch>. Remember that the drawing entities always belong to the active sketch.
[4] Click <Look At Face/Plane/ Sketch>.
[1] Click <New Sketch>.
[5] Click <Display Model> to turn off the solid model display.
[3] Click to switch to <Sketching Mode>.
[6] Draw a circle with a diameter of 30 mm. This is the only entity in <Sketch2>. Note that both Sketch1 and Sketch2 are on the same plane (XYPlane).
60�
Exercise 5. Crank
5-6 Add Material to the Existing Body
[2] Click <Apply>.
[1] Click <Extrude>.
[4] The default <Operation> is <Add Material>.
[5] Click <Generate>.
[3] Type 20 (mm).
[8] Click the plus sign <+> to expand <Extrude2>.
[7] <Sketch2> is added under XYPlane.
[9] <Extrude2> uses <Sketch2> as the base geometry. The <Extrude2> is simply a cylinder.
[6] The newly created material is simply a cylinder; it adds to the existing body to form a single body.
[10] The body after adding material.
Exercise 5. Crank �
61
5-7 Create Another New Sketch on XYPlane
[2] A new sketch (Sketch3) is created.
[4] Click <Look At Face/Plane/ Sketch>.
[1] Click <New Sketch>.
[5] Click <Display Model> to turn off the solid model display.
[3] Click to switch to <Sketching Mode>.
[6] Draw a circle with a diameter of 20 mm. This is the only entity in <Sketch3>. Note that all three sketches are on the same plane (XYPlane).
62�
Exercise 5. Crank
5-8 Extrude to Create a Third Simple Body
[2] Click <Apply>.
[1] Click <Extrude>.
[3] Select <Cut Material>.
[4] Select <Through All>. [5] Click <Generate>.
[7] <Sketch3> is added under XYPlane.
[8] Click the plus sign <+> to expand <Extrude3>.
[9] <Extrude3> uses <Sketch3> as the base geometry. The <Extrude3> is simply a cylinder.
[6] The newly created material is simply a cylinder; The material is cut from the existing body.
[10] The body after cutting material.
Wrap Up
Close DesignModeler, save the project as "Crank," and exit the Workbench.
Exercise 5. Crank �
63
5-9 Review
<Plane> and <Sketch>
A sketch must be created on a plane; each plane, however, may contain multiple sketches. In the beginning of a DesignModeler session, three planes are automatically created: XYPlane,YZPlane, and ZXPlane. You can create new planes and new sketches as many as needed.
<Active Plane> and <Active Sketch>
The currently active plane and active sketch are shown in the toolbar (5-4[1, 2]). New sketches are created on the active plane, and new drawing entities are created on the active sketch. You may change the active plane or active sketch by selection from the pull-down list, or simply clicking the names on the model tree.
Modeling Mode
In the modeling mode (5-4[4]), several modeling tools become available, including Extrude, Revolve, Sweep, Skin/Loft, Thin/Surface, Blend, Chamfer, Point, etc. In addition, a <Tree Outline> is displayed.
Model Tree
<Tree Outline> (5-4[11]) contains an outline of the model tree, the data structure of the geometric model. Each branch of the tree is called an object, which may contain one or more objects. At the bottom of the model tree is a part branch, which is the only object that will be exported to <Mechanical>. By right-clicking an object and selecting a tool from the context menu, you can operate on the object, such as delete, rename, duplicate, etc. � The order of the objects is relevant. <DesignModeler> renders the geometry according to the order of objects in the model tree. New objects are normally added one after another. If you want to insert a new object BEFORE an existing object, right-click the existing object and select <Insert/...> from the context menu. After insertion, <DesignModeler> will re-render the geometry.
<Add Material> and <Cut Material>
With <Add Material> operation mode, the created material adds to the existing active body (i.e., they form a union). With <Cut Material> operation mode, the material is cut from the existing active body. An active body is one that is not frozen (to be dened later).
64�
Exercise 6. Geneva Gear Index�
Exercise 6
Geneva Gear Index
6-1 Introduction
In this exercise, we'll create a 3D solid model for a Geneva gear index, of which the details are shown in the gure below. Note that a global coordinate system is set up and shown in the gure.
Y 5 R0.63
5 0
.2
Unit: in.
1.5
29
X D0.25 D0.5
D2.47 D1.25 0.25 0.44
Exercise 6. Geneva Gear Index �
65
6-2 Start Up DesignModeler
[1] Launch ANSYS Workbench and create a <Geometry> system.
[2] Double-click <Geometry> cell to start up the DesignModeler. Select <Inch> as the length unit.
6-3 Draw a Sketch on XYPlane
[2] draw two lines, each connects the origin to an end point of the arc.
[1] On XYPlane, use <Draw/Arc by Center> to draw an arc centered at the origin and with a radius of 1.235 (in.) like this.
[5] draw two circles centered at end points of the new arc and with the same radius of 0.1 (in.).
[3] Specify an angle dimension of 72 (degrees) for the sector.
[4] Use <Draw/Arc by Center> to draw another arc with a radius of 0.625 (in.) like this.
66�
Exercise 6. Geneva Gear Index�
[7] Draw a line connecting the upper circle to the outer arc like this. The line is parallel to the adjacent line, therefore make sure a <//> (indicating parallel auto constraint) appears before clicking.
[6] Draw a line connecting the lower circle to the outer arc like this. The line is horizontal, therefore make sure an <H> appears before clicking. [9] Apply a <Constraints/ Tangent> on the upper circle and the parallel line.
[8] Apply a <Constraints/Tangent> on the lower circle and the horizontal line.
Exercise 6. Geneva Gear Index �
67
[10] Draw a line starting from the origin like this. Then, make the outer arc symmetric about the newly created line. To do this, select <Constraints/ Symmetric>, and then subsequently click the line and the two end points of the arc.
[11] Use <Dimension/ General> to specify a length dimension of 1.529 (in.). [12] Use <Draw/Arc by Center> to draw an arc centered at one end of the new line. Specify the radius dimension of 0.63 (in.).
68�
Exercise 6. Geneva Gear Index�
[13] Trim away unwanted segments. This is the sketch after trimming. Note that, although the the sketch is no more blue-colored, all the dimensions are not changed.
6-4 Extrude to Generate 1/5 of the Gear Index
[1] Extrude the sketch 0.25 in.
Exercise 6. Geneva Gear Index �
69
6-5 Duplicate the Body Circularly
[4] Select the body.
[1] Select <Create/ Pattern> from the pull-down menu.
[2] In the <Details View>, select <Circular> for <Pattern Type>. [3] Click the yellow area to bring up <Apply/ Cancel> buttons.
[5] And click <Apply>. [6] Click the yellow area to bring up <Apply/ Cancel> buttons. [8] And click <Apply>. [7] Select this edge.
[9] Type 4 for <Copies>.
[10] Click <Generate>.
70�
Exercise 6. Geneva Gear Index�
6-6 Create the Hub
[4] Click <Generate>.
[1] Select <Create/ Primitive/Cylinder> from the pull-down menu.
[2] Type 0.44 (in.) for the <Axis Z Component>.
[3] Type 0.25 (in.) for the <Radius>.
[9] Click <Generate>. [5] Select <Create/ Primitive/Cylinder> again.
[6] Select <Cut Material> for <Operation>.
[7] Type 0.44 (in.) for the <Axis Z Component>.
[8] Type 0.125 (in.) for the <Radius>.
Wrap Up
Close DesignModeler, save the project as "Geneva," and exit the Workbench.
Exercise 6. Geneva Gear Index �
71
6-7 Review
Auto Constraints: <//>
It is applicable to a line, indicating that the line is parallel to another line in the same plane (6-3[7]).
Sketching Tools: <Constraints/Tangent>
It can be applied on two edges (lines or curves), one of them must be a curve, to make them tangent to each other (6-3[8, 9]).
<Create/Pattern>
This tool allows you to create copies bodies in three types of pattern: Linear, Circular, and Rectangular (6-5).
<Create/Primitive/Cylinder>
This tool creates a cylinder by specifying its origin, axis, and radius (6-6). The origin and axis are dened by referring to the active plane coordinate system (1-12).
72�
Exercise 7. Yoke�
Exercise 7
Yoke
7-1 Introduction
The yoke is a part of a universal joint [1]. In this exercise, we'll create a 3D solid model for the yoke, of which the details are shown in the multiview drawings below. Note that a global coordinate system is also shown in the gure.
[1] The yoke is a part of a universal joint. X
Z Y
D1.20 Y
Unit: in. R1.00
Z 1.50
3.55
D0.75 2 0.75 R1.00
Exercise 7. Yoke �
73
7-2 Start Up DesignModeler
[1] Launch ANSYS Workbench and create a <Geometry> system.
[2] Double-click <Geometry> cell to start up the DesignModeler. Select <Inch> as the length unit.
7-3 Create a U-Shape Body
[1] On XYPlane, use <Draw/ Arc by Center> tool to draw two concentric arcs. Specify the radius dimensions (1.00 in. and 1.75 in. respectively).
[2] Use <Draw/ Polyline> tool to draw a 3-segment polyline, starting from this point.
[5] Click the last point and then select <Open End> from the <Context Menu>. If the last segment is not vertical, use <Constraints/Vertical> to make it vertical.
[6] Use <Dimensions/ General> to specify a length of 2.50 (in.). [3] Click the second point. Make sure the rst segment is vertical.
[4] Click the third point. Make sure the second segment is horizontal.
74�
Exercise 7. Yoke�
[7] Draw two vertical lines.
[8] Trim away this segment.
[12] Click <Generate>. [9] Click <Extrude>.
[10] Select <Both - Symmetric>.
[11] Type 1 (in.) for <Depth>. Note that, the sketch is extruded by 1.0 in. for both sides of XYPlane, therefore the total depth is 2.0 in.
Exercise 7. Yoke �
75
7-4 Create Rounds
[1] Select <Blend/ Fixed Radius> from the toolbar.
[2] Controlselect these 4 edges.
[4] Type 1 (in.) for <Radius>.
[5] Click <Generate>.
[3] Click <Apply>.
7-5 Create Holes
[1] Select <Create/ Primitive/Cylinder> from the pull-down menu.
[3] Click <Generate>.
[2] Click to bring up <Apply/Cancel> buttons, then select <YZPlane> from the model tree and click <Apply>. Now the global Y-axis becomes local X-axis, and the global Zaxis becomes local Y-axis. The origin and the axis are dened using the local (plane) coordinate system.
76�
Exercise 7. Yoke�
7-6 Create Shaft
[7] The new plane become active plane.
[1] Click <New Plane> to create a new plane.
[6] Click <Generate>.
[2] A new plane (Plane4) is inserted into the model tree. [3] Click to bring up <Apply/Cancel> buttons, then select <ZXPlane> from the model tree and click <Apply>. Now the global Z-axis becomes local X-axis, and the global X-axis becomes local Y-axis.
[4] Select <Offset Z> for <Transform 1>. Note that it refers to the local Z-axis.
[5] Type 3.55 (in.) for <Value>.
[9] The local coordinate system of the new plane. Note that, in a local coordinate system, the Workbench also uses RGB colors to represent XYZ axes respectively.
[8] The global coordinate system. Note that the Workbench uses RGB colors to represent XYZ axes respectively.
Exercise 7. Yoke �
77
[3] Click to turn off model display.
[2] Click to look at <Plane4>.
[1] Click to switch to the <Sketching Mode>.
[4] Draw a circle with a diameter of 1.2 (in.).
[5] Click <Extrude>.
[8] Click <Generate>.
[6] Select <Reversed> for <Direction>. Now, the extrusion direction is the -Z direction.
[7] Select <To Next>. Now the sketch will be extruded up to the next face.
Wrap Up
Close DesignModeler, save the project as "Yoke," and exit the Workbench.
78�
Exercise 7. Yoke�
7-7 Review
Extrude Direction
There are four options you can choose for the extrusion direction: <Normal>, <Reversed>, <Both -- Symmetric>, and <Both -- Asymmetric>. In <Normal> case, the extrusion direction is the Z-direction of the sketching plane. When <Reversed> is selected, the extrusion direction reverses to the -Z-direction (7-6[6]). For <Both -- Symmetric>, the extrusion is along both +Z and -Z directions with the same depth (dened by <Depth>) (7-3[10]). For <Both -Asymmetric>, the extrusion is along both +Z and -Z directions with the different depths (dened by <Depth> and <Depth 2>).
<Blend/Fixed Radius>
This tool can be used to place rounds or llets on a body (7-4). The llets are specied on edges, while the rounds can be specied on edges or faces. When faces are specied for rounds, the rounds are placed on the enclosing edges.
Create New Planes from Existing Planes
There are many ways to create a new plane [1]. Creating new plane from an existing plane (7-6[1-9]) involves selecting the existing plane and then transforming the existing plane to a new position and orientation.
[1] There are many ways to create a plane.
Exercise 8. Support�
79
Exercise 8
Support
8-1 Introduction
The support is a part of the clamping mechanism mentioned in Exercise 1 [1]. In this exercise, we'll create a 3D solid model for the support, of which the details are shown in the multiview drawings below. Note that a global coordinate system is also shown in the gure.
X [1] The support is a part of a clamping mechanism. 0.125 0.375 0.219 0.375 1.250 0.250 R0.313 Unit: in. Z 0.375 Y
0.750
2 R0.100 0.250 Y
:4 pe Slo
R0.156 1.250
5
1.250
6 D0.25
X 0.875 0.375 0.625 0.125
2.500
1.000
R0.100
80�
Exercise 8. Support
8-2 Start Up DesignModeler
[1] Launch ANSYS Workbench and create a <Geometry> system.
[2] Double-click <Geometry> cell to start up the DesignModeler. Select <Inch> as the length unit.
8-3 Create Vertical Plate
[1] On XYPlane, draw three circles of the same radius. Specify their locations (two horizontal dimension of 1.25 and one vertical dimension of 1.25)
[3] Use <Draw/ Polyline> to draw a polyline starting from roughly here.
[2] Specify a diameter of 0.25 in. for any one of the circles.
[6] Click the fourth point, making sure the last segment is vertical. Then select <Closed End> from the <Context Menu>.
[4] Click the second point, making sure the last segment is vertical. [7] Specify all dimensions so that all entities become blue-colored: length dimensions of 2.50 and 0.625; a horizontal dimension of 0.375, a vertical dimension of 0.875, and an angle dimension of 45 degrees.
[5] Click the third point, making sure the last segment is horizontal.
Exercise 8. Support�
81
[8] Draw two more circles, specify their radii (0.156 and 0.313) and locations (horizontal dimensions of 0.219 and 0.250; vertical dimensions of 0.25 and 0.75)
[9] Trim away unwanted segments.
82�
Exercise 8. Support
[10] Draw two llets with the same radius of 0.1 in.
[11] Click <Extrude>.
[13] Click <Generate>.
[12] Type 0.125 (in.) for <Depth>.
Exercise 8. Support�
83
8-4 Create Horizontal Plate
[7] Click <Generate>; a <Plane4> is created.
[1] Click <New Plane>.
[2] Select <From Face>.
[3] The default <Subtype> is <Outline Plane>.
[4] Click the yellow area to bring up <Apply/ Cancel> buttons.
[5] Click this face at a location near this circle. A plane coordinate system shows up like this (the X axis points to global -X axis). Note that the location you click determines the origin and the axes of the plane coordinate system. If the coordinate system is not like this, simply re-click again until it is correct.
[6] Click <Apply>.
[10] Click to turn of the model display.
[9] Click to look at <Plane4>.
[8] Click to switch to <Sketching Mode>.
[11] This is <Plane4>; it is called an <Outline Plane> since it includes an outline. The outline is not part of a sketch but can be used as references.
[12] Draw a rectangle like this. Note that three sides of the rectangle coincide with plane's outline. Specify a length dimension of 0.125 in. so that the rectangle become blue-colored.
84�
Exercise 8. Support
[13] Click <Extrude>. [15] Click <Generate>.
[14] Type 1 (in.) for <Depth>.
8-5 Create Holes on the Horizontal Plate
[1] Click <New Plane>. [3] Click the yellow area to bring up <Apply/ Cancel> buttons.
[2] Select <From Face>.
[5] Click <Apply>.
[4] Click this face at a location near this corner so that the plane coordinate system is like this (the X axis points to global X axis). Remember, if the coordinate system is not like this, simply reclick again until it is correct.
[6] Click <Generate>; a <Plane5> is created.
Y
X
Exercise 8. Support�
85
[11] Draw three circles of the same diameter (0.25 in.) and specify their positions (horizontal dimensions of 0375, 0.375, and 1.25; vertical dimensions of 0.375, 0.375, and 0.125)
[9] Click to turn of the model display.
[8] Click to look at <Plane5>.
[7] Click to switch to <Sketching Mode>.
[10] This is <Plane5>; it includes an outline.
[16] Click <Generate>. [12] Click <Extrude>.
[13] Select <Cut Material>. [14] The <Direction> automatically becomes <Reversed>.
[15] Select <Through All>.
86�
Exercise 8. Support
8-6 Create the Round
[1] Select <Blend/ Fixed Radius> from the toolbar.
[2] Click this edge.
[4] Type 0.1 (in.) for <Radius>.
[3] Click <Apply>.
[5] Click <Generate>.
Wrap Up
Close DesignModeler, save the project as "Support," and exit the Workbench.
Exercise 8. Support�
87
8-7 Review
Create New Planes From Faces
You can create a new plane from an existing face (8-4[1-7]). There are subtypes to choose: <Outline Plane> and <Tangent Plane>. The only difference is that a <Tangent Plane> doesn't include the outline of the face. In either subtype, the plane coordinate system is determined according to how you click the face. The origin is usually located at the closest corner point or the center of a circle (or an arc); The Z-axis always points out of the face; The X-axis is usually parallel to the closest edge. � An outline plane include the outline of the face (8-4[11]). The outline is not part of a sketch but can be used as references (datum). Without the outline, the only references are two exes (X-axis and Y-axis of the plane). However, you can copy the outline (or part of the outline) into a sketch, using the sketching tool <Modify/Duplicate>.
88�
Exercise 8a. Structural Analysis of the Support�
Appendix:
Exercise 8a
Structural Analysis of the Support
8a-1 Introduction
In this exercise, we will perform a static structural analysis for the support created in Exercise 8. The objective is to nd the deformation and the stresses under the working loads, and make sure the stresses are within the allowable level (30,000 psi). � As mentioned in Exercise 1a, the clamping mechanism is entirely made of steel and is designed to withstand a clamping force of 450 lbf [1]. After a structural analysis of the entire mechanism [2] (which is performed in Exercise 17a), the results show shows that, to withstand a clamping force of 450 lbf, the support is subject to external forces as shown [3] (also see 17a-4). Note that the holes on the horizontal plates are xed to the ground [4]. � The analysis task will be carried out with <Mechanical>.
[2] This is the deformed structure under the design loads. The wireframe is the underformed conguration.
[1] The clamping mechanism is designed to withstand a clamping force of 450 lbf.
380 lbf
62 lbf
[3] The external force on the arm. See 17a-14.
163 lbf 380 lbf [4] The horizontal plates are xed to the ground.
Exercise 8a. Structural Analysis of the Support�
89
8a-2 Start Up <Mechanical>
[1] Launch ANSYS Workbench.
[2] Open the project "Support," which was saved in Exercise 8.
[3] Double-click to create a <Static Structural> analysis system.
[5] And drop here. A link is created, indicating that both <Geometry> share the same data.
[4] Drag <Geometry>...
[6] Double-click to start up the <Mechanical>.
90�
Exercise 8a. Structural Analysis of the Support�
8a-3 Specify Loads
[2] Select <Loads/ Force>.
[7] Make sure the length unit is <in.> (1a-2[8, 9]).
[1] Click to highlight <Static Structural>.
[3] Select this cylindrical face.
[4] Click <Apply>.
[5] Select <Components>.
[6] Type -380 (lbf) for <X Component>, and 62 (lbf) for <Y Component>.
Exercise 8a. Structural Analysis of the Support�
91
[7] Select <Loads/ Force> again.
[8] Select this cylindrical face.
[9] Click <Apply>. [10] Select <Components>.
[11] Type 380 (lbf) for <X Component>, and 163 (lbf) for <Y Component>.
8a-4 Specify Supports
[2] Control-select the three cylindrical faces on the horizontal plate.
[1] Select <Supports/ Frictionless Support>.
[3] And control-select this face.
92�
Exercise 8a. Structural Analysis of the Support�
[4] Click <Apply>. Totally 5 faces are set to <Frictionless Support>.
[6] Control-select the four cylindrical faces on the vertical plate.
[7] Click <Apply>.
[5] Select <Supports/ Displacement.
[8] Type 0 (in.) for <Z Component>.
8a-5 Insert Result Objects
[2] Select <Stress/ Equivalent (von-Mises)>.
[1] Click to highlight <Solution>.
[3] A solution object is inserted under the <Solution> branch.
Exercise 8a. Structural Analysis of the Support�
93
8a-6 Solve the Model
[1] Click <Solve>.
[2] Select <Edges/ Show Undeformed WireFrame>.
[3] The maximum stress is 20,608 psi, well below the allowable stress (30,000 psi).
[4] Click <Play> to animate the deformation.
[5] Click <Stop> to stop the animation.
Wrap Up
Close <Mechanical>, save the project as "Support-a," and exit the Workbench.
94�
Exercise 9. Wheel�
Exercise 9
Wheel
9-1 Introduction
The main purpose of this exercise is to introduce another modeling tool (than <Extrude>): <Revolve>, which takes a sketch as the prole and revolves about an axis to create a 3D solid body. � We'll create a 3D solid model for a wheel, of which the details are shown in the multiview drawings below. A global coordinate system is also shown in the gure. � Note that the wheel is axisymmetric. An axisymmetric body can be created by drawing a prole then revolting about its axis to generate the 3D solid body.
Y Y 45�
Unit: in.
D1.00 D1.50 D3.50 D4.00 0.25 0.50 0.75
Exercise 9. Wheel�
95
9-2 Start Up DesignModeler
[1] Launch ANSYS Workbench and create a <Geometry> system.
[2] Double-click <Geometry> cell to start up the DesignModeler. Select <Inch> as the length unit.
9-3 Create the Prole
[1] On XYPlane, use <Draw/Polyline> to draw a polyline starting from here.
[2] and ending here. Select <Open End> from the context menu. Specify all dimensions as shown.
96�
Exercise 9. Wheel�
[3] Use <Modify/Replicate> to "mirror copy" everything about the Y-axis. The procedure is as follows: (a) select all segments; (b) select <End/Use Plane Origin as Handle> from the context menu; (c) select <Flip Horizontal> from the context menu; (d) select <Paste at Plane Origin> from the context menu; (e) nally select <End> from the context menu (or press <Esc>).
Exercise 9. Wheel�
97
9-4 Revolve the Sketch about X-Axis
[5] Click <Generate>.
[6] Click to turn off the plane display.
[1] Click <Revolve> in the toolbar.
[2] Rotate to an isometric view.
[3] Click <Apply>. The active sketch is automatically taken as the prole.
[4] On the graphics window, select the X-axis and click <Apply>.
Wrap Up
Close DesignModeler, save the project as "Wheel," and exit the Workbench.
9-5 Review
Modeling Tool <Revolve>
It takes a sketch as the prole and revolves about an axis to create a 3D solid body (9-4[1-5]). The angle of revolution can be specied.
98�
Exercise 10. Transition Pipe�
Exercise 10
Transition Pipe
10-1 Introduction
The transition pipe is used to connect two pipe segments. In this exercise, we'll create a 3D solid model for the transition pipe, of which the details are shown in the multiview drawings below. A global coordinate system is also shown in the gure. � The main purpose of this exercise is to introduce another modeling tool: <Sweep>, which takes a sketch as the path and another sketch as the prole; the prole then "sweeps" along the path to create a 3D solid body. � Note that it is possible to create the curved pipe by using of <Revolve> tool (Exercise 9), however, as an exercise, we decide to create the curved pipe by using <Sweep>.
Y 2 D3.50 2 D2.50 8 D0.25
R1/16"
R3.50
Unit: in. D1.00 R1/8" 2 0.25 X Z R2.50
Exercise 10. Transition Pipe �
99
10-2 Start Up DesignModeler
[1] Launch ANSYS Workbench and create a <Geometry> system.
[2] Double-click <Geometry> cell to start up the DesignModeler. Select <Inch> as the length unit.
10-3 Create a Sketch for the Path
[1] On the XYPlane, draw an arc like this . This sketch will be used as the sweeping path of the curved pipe.
10-4 Create a Sketch for the Prole
[1] Select <ZXPlane> (or click ZXPlane in the model tree).
[1] On the ZXPlane, draw two concentric circles like this. This sketch will be used as the prole of the curved pipe.
100�
Exercise 10. Transition Pipe�
10-5 Create a Body Using <Sweep>
[1] Click <Sweep> on the <Toolbar>.
[3] Click <Generate>.
[2] Select <Sketch2> (from the model tree) for the <Prole> and select <Sketch1> (from the model tree) for the <Path>.
10-6 Create a Plane on One End of the Pipe
[1] Click <New Plane>. [2] Select <From Face>.
[4] Click this face. Note that the local Z-axis (blue) points out of the face, and the local X-axis (red) points to the global -Z direction.
[5] Click <Apply>
[3] Click the yellow color area to bring up <Apply/Cancel> buttons.
[6] Click <Generate>.
Exercise 10. Transition Pipe �
101
10-7 Create an End Plate
[1] On the new plane (Plane4), create a sketch like this (see next two steps). Remember to impose two <Symmetry> constraints to make the four small circles symmetric about X-axis and about Y-axis.
[3] The sketch doesn't include this circle, which is the outer circle of the plane outline.
[2] The sketch includes a circle that overlaps with the inner circle of the plane outline.
[4] Click <Extrude>. [6] Click <Generate>.
[5] Select <Add Frozen>. This generates a separate body.
102�
Exercise 10. Transition Pipe�
10-8 Create Another End Plate by Duplication
[4] Click this face. Note that the local Z-axis (blue) points out of the face.
[1] Click <New Plane>.
[2] Select <From Face>.
[5] Click <Apply>.
[3] Click the yellow color to bring up <Apply/Cancel> buttons.
[6] Click <Generate>. <Plane5> is created.
[8] Select <Move>. [9] Select the existing end plate.
[10] Select <Plane4> from the model tree.
[11] Select <Plane5> from the model tree.
[7] Select <Create/ Body Operation>. [12] Click <Generate>.
Exercise 10. Transition Pipe �
103
10-9 Unite All Bodies into One Body
[2] <Unite> is the default <Operation>.
[3] Control-select all three bodies.
[4] Click <Generate>. [1] Select <Create/ Boolean>.
10-10 Create Fillets
[2] Controlselect these two edges. [1] Select <Blend/ Fixed Radius>.
[3] Click <Apply>.
[4] Click <Generate>.
104�
Exercise 10. Transition Pipe�
10-11 Create Rounds
[1] Select <Blend/ Fixed Radius>. [2] Controlselect these two edges.
[3] Click <Apply>.
[4] Click <Generate>.
10-12 Turn Off Edges
[1] Select <View/Shaded Exterior> to turn off the edges display.
Wrap Up
Close DesignModeler, save the project as "Pipe," and exit the Workbench.
Exercise 10. Transition Pipe �
105
10-13 Review
Modeling Tool <Sweep>
The <Sweep> can be thought of a generalization of the <Extrude>. <Sweep> takes a sketch as the path and another sketch as the prole; the prole then "sweeps" along the path to create a 3D solid body (10-5). The <Sweep> also can be used to create spiral shapes, which will be demonstrated in Exercise 12.
Add Frozon
A body is either in a state of active or frozen. The default state is active. Two overlapped active bodies would automatically join together to form a single body. If either of them is frozen, they wouldn't join together. Therefore, the only way to avoid overlapped bodies joining together is to make at least one of them frozen. In 10-7, we create the end plate as frozen body (separating it from the curved pipe), so that, in 10-8, we can copy the end plate alone without the curved pipe.
<Body Operation/Move>
This tool moves a body (or a group of bodies) to another position and orientation in the same way that the source plane is move to coincide with the destination plane (10-8). If the <Reserve Bodies?> option is <Yes>, it essentially copies the bodies. This tool is useful for "assembling" parts together to form an assembly.
<Create/Boolean>
Using boolean operations, bodies can be united, intersected, and subtracted.
106�
Exercise 11. C-Bar �
Exercise 11
C-Bar
P
11-1 Introduction
The C-shaped steel bar is used as a dynamometer, a device to measure the magnitude of a force P [1]. A strain gauge is bonded to the surface of a location as shown [2]. The measured strain is then used to calculate the force P. � The details are shown below; a coordinate system is also included in the gure. In this exercise, we will create a 3D solid model for the C-bar. Due to the symmetry, we will create the upper half of the model and then complete the model by using a "mirror" (copy) operation.
[2] A strain gauge is bonded to the surface here. The measured strain is used to calculate the force P.
Y 100 70 D10 20 Y P 20
[1] The Cbar is used to measure a force P.
Unit: mm. R 50
R10 X 120 Z
40
40
30
[3] The body has a thickness of 5 mm. everywhere.
[4] All llets have radii of 3 mm.
Exercise 11. C-Bar �
107
11-2 Start Up DesignModeler
[1] Launch ANSYS Workbench and create a <Geometry> system.
[2] Double-click <Geometry> cell to start up the DesignModeler. Select <Millimeter> as the length unit.
11-3 Create a Sketch for the Path
[1] On the XYPlane, draw a sketch like this.
11-4 Create a Sketch for the Prole
[2] On the YZPlane, draw a sketch like this. The sketch is symmetric about the horizontal axis.
[1] Select <YZPlane> (or click YZPlane in the model tree).
108�
Exercise 11. C-Bar �
11-5 Create a Body Using <Sweep>
[3] Click <Generate>. [1] Click <Sweep> on the <Toolbar>.
[2] Select <Sketch2> and <Sketch1> (from the model tree) as the <Prole> and <Path> respectively.
11-6 Create an Ear
[2] Click <New Sketch>. <Sketch3> is created on the <XYPlane>.
[4] Draw a sketch for the <Sketch3> like this. Note that <Sketch1> is hidden now.
[1] Select <XYPlane> [3] Right-click <Sketch1> and select <Hide Sketch> from the context menu.
Exercise 11. C-Bar �
109
[5] Click <Extrude>.
[7] Click <Generate>.
[6] Extrude 2.5 mm both sides.
11-7 Create Fillets
[2] Control-select these two edges.
[1] Select <Blend/ Fixed Radius>.
[3] Click <Apply>.
[4] Click <Generate>.
110�
Exercise 11. C-Bar �
11-8 "Mirror" Copy the Body
[2] <Mirror> is the default operation type.
[3] Select the body and click <Apply>.
[4] Select <ZXPlane> from the model tree.
[1] Select <Create/ Body Operation>.
[5] Click <Generate>.
[6] Select <View/Shaded Exterior> to turn off the edges display.
Wrap Up
Close DesignModeler, save the project as "CBar," and exit the Workbench.
Exercise 11a. Deformation of the C-Bar �
111
Appendix:
Exercise 11a
Deformation of the C-Bar
11a-1 Introduction
As described in Exercise 11, the C-shaped steel bar is used to measure the magnitude of a force P [1]. A strain gauge is bonded to the surface of the location as shown [2]. The location is chosen because the strain is relatively large and distributed quite uniformly, so that the measured strain is not sensitive to the variation of the location of the strain gauge. The measured strain is then used to calculate the force P. The idea also relies on the fact that the strain is linearly proportional to the force P, which is true when the deformation is small enough. In other words, if the measured strain is doubled, then the force must be doubled. � In this section, we will assume a force of P = 2,000 N, and perform a simulation to establish a relation between the force P and the strain . [1] Applied force P. [5] The two systems share the same <Geometry>. You can edit up-stream cell but not the downstream cell. P P
[2] Strain gauge.
11a-2 Start Up
[2] Open the project "CBar," which was saved in Exercise 11.
[6] Double-click <Model> to start up <Mechanical> application.
[3] Drag <Static Structural> and drop to <Geometry> cell of the <Geometry> system. [1] Launch Workbench
[4] A <Static Structural> system is created.
112�
Exercise 11a. Deformation of the C-Bar
[7] <Mechanical GUI> shows up. If your GUI layout is not like this, pull-down-select <View/ Windows/Reset Layout> and select <Graphics> tab., see [8].
[9] If the unit system is not like this, see [10].
[8] Whenever necessary, pulldown-select <View/Windows/ Reset Layout> and select <Graphics> tab to bring back the "standard" layout.
[10] Pull-down-select <Unit/ Metric (mm, kg N, s, mV, mA)>. Unlike DesignModeler, the units in <Mechanical> can be changed any time.
Exercise 11a. Deformation of the C-Bar �
113
11a-3 Generate Mesh
[1] Highlight <Mesh>.
[3] In the <Details>, select <Fine> for <Relevance Center> and type "75" for <Relevance>.
[2] Click "+" to expand <Sizing>.
[4] Select <Mesh/ Generate Mesh>.
[5] Click "+" to expand <Statistics>.
[6] Number of nodes and elements are shown in the Details view. Your numbers may not be the same as here. Also note that in an academic teaching version of ANSYS Workbench, the number of nodes or the number of elements is limited to 30,000.
114�
Exercise 11a. Deformation of the C-Bar
Meshing
The process of dividing a body into small bodies is call meshing. The small bodies are called elements, or nite elements. The simulation method is thus called nite element simulation. The basic idea of nite element methods is to divide a body of rather complicated geometry into smaller elements of simple geometry, and the elements are assumed to be connected to each other through nodes. The element's geometry is so simple that a set of equations may be established easily for each element. All equations are then solve simultaneously for the displacements. Strains are then calculated from the displacements. And stresses are in turn calculated from the strains. � In general, the ner the mesh, the more accurate the solution (and more computing time). In this exercise, we control the mesh size by simply adjusting <Relevance Center> and <Relevance>. � Also, note that the Workbench will automatically generate a mesh right before it solves the problem if a mesh doesn't exist.
Limitation of Mesh Count
In this book, we will restrict the number of nodes or elements to be no more than 30,000, which is a limitation imposed by the <ANSYS Academic Teaching> version.
11a-4 Set Up Environment Conditions
[3] Select this inner cylindrical surface.
[1] Highlight <Static Structural>.
[2] Select <Supports/Fixed Support>.
[4] Click <Apply>.
Exercise 11a. Deformation of the C-Bar �
115
[5] Select <Loads/ Force>.
[6] Select this inner cylindrical surface.
[8] Select <Components> for <Dene By> and type -2,000 (N) for <Y Component>.
[7] Click <Apply>.
[10] We've added these two environment conditions.
116�
Exercise 11a. Deformation of the C-Bar
11a-5 Insert Result Objects
[1] Highlight <Solution>.
[2] Select <Strain/Normal> to insert a <Normal Elastic Strain> result object.
[3] Select <Y Axis> for <Orientation>.
[5] The object is renamed for better readability. [4] Right-click the result object as shown and select <Rename Based on Denition> from the context menu.
Exercise 11a. Deformation of the C-Bar �
117
11a-6 Solve the Model and View the Results
[1] Click <Solve>.
[4] Click <Probe>.
[2] Click <Play> to animate the deformation.
[3] Click <Stop> to stop the animation.
[5] Move the mouse around the model to display the strain value.
[6] Move the mouse to the location of the strain gauge and click to put a label on the location. The strain is about 0.000296.
118�
Exercise 11a. Deformation of the C-Bar
11a-7 Conclusion
The simulation results show that a force of P = 2,000 N produces a strain = 0.000296. We may establish a relation between the force P and the strain as follows: 2000 0.000296
P=
For example, if the measured strain in the strain gauge is 1 = 0.0001, then the force P1 is 2000 0.0001 = 676 N 0.000296
P1 =
Wrap Up
Close <Mechanical>, save the project ("CBar"), and exit the Workbench.
Exercise 12. Threaded Shaft�
119
Exercise 12
Threaded Shaft
12-1 Introduction
The threaded shaft is a part of the clamping mechanism mentioned in Exercise 1 [1]. In this exercise, we will create a 3D solid model for the threaded shaft, of which the details are shown below. [1] The threaded shaft is a part of a clamping mechanism.
Unit: in. Y
[2] Major diameter d = .375 in.
[3] Pitch p = 1/16 in.
[4] Thread form: Unied national coarse
D0.625 D0.266
.375-16UNC
D0.250
0.438
3.750
0.875
Pitch p pH 8
H 8 H = ( 3 2)p = 0.0541266 in H p = 0.0557342 in 8 H = 0.0135316 in 4
60 �
H = ( 3 2)p
Slo pe:
H 4
Major diameter d
pe: Slo 60
�
120�
Exercise 12. Threaded Shaft
12-2 Start Up DesignModeler
[1] Launch ANSYS Workbench and create a <Geometry> system.
[2] Double-click <Geometry> cell to start up the DesignModeler. Select <Inch> as the length unit.
12-3 Create the Shaft
[2] Click <Revolve>.
[1] On the XYPlane, use <Draw/ Polyline> to draw a sketch like this. Specify the dimensions.
[4] Click <Generate>.
[3] In the graphics window, select the X-axis for <Axis>.
Exercise 12. Threaded Shaft�
121
12-4 Create a Hole
[1] Select <Create/ Primitive/Cylinder> from the pull-down menu.
[3] Click <Generate>.
[2] The length is arbitrary as long as it is not less than 0.625 in.
12-5 Create Threads
[1] Click to create a new sketch (Sketch2) on XYPlane.
[2] Right-click <Sketch1> and select <Hide Sketch>. [3] Click <Sketch2> to make it active.
122�
Exercise 12. Threaded Shaft
[5] This is the horizontal dimension measured from the Y-axis.
[4] Draw a sketch <Sketch2> like this. Specify the dimensions. This sketch will be used as the sweeping prole. [6] This is the vertical dimension measured from the X-axis.
[7] Click to create a new sketch (Sketch3) on XYPlane.
[8] Hide <Sketch2> and make <Sketch3> active.
[9] Draw a sketch <Sketch3> like this. The sketch is simply a horizontal line. The length of the line is arbitrary as long as it is not less than the total length of the threads (3.75 in.). This sketch will be used as the sweeping prole.
Exercise 12. Threaded Shaft�
123
[10] Click <Sweep>.
[11] Select <Sketch2> (from the model tree) as the <Prole>. [12] Select <Sketch3> (from the model tree) as the <Path>. [13] Select <Pitch> for <Twisting Specication>.
[14] Type 0.0625 (in.) for <Pitch>.
[15] Click <Generate>.
Wrap Up
Close DesignModeler, save the project as "Shaft," and exit the Workbench.
124�
Exercise 13. Lift Fork�
Exercise 13
Lift Fork
13-1 Introduction
The lifting fork is used in an LCD (liquid crystal display) manufacturing factory to handle glass panels. In this section, we will create a 3D solid model for the lift fork, of which the details are shown below. � The cross sections of the prongs (ngers) are not uniform along the length [1-3]. The tools <Extrude> or <Sweep> cannot be used to created the prongs. This exercise introduces a modeling tool, <Skin/Loft>, which takes a series of proles from different planes and creates a 3D solid that ts through these proles
[1] At the root, the cross section is 160x40 (mm.). [3] At the midway, the cross section is 130x20 (mm.). [2] At the tip, the cross section is 100x10 (mm.).
160
200
X
240
Unit: mm.
Exercise 13. Lift Fork �
125
13-2 Start Up DesignModeler
[1] Launch ANSYS Workbench and create a <Geometry> system.
[2] Double-click <Geometry> cell to start up the DesignModeler. Select <Millimeter> as the length unit.
13-3 Create the Transversal Beam
[1] Draw a rectangle on <XYPlane>. The rectangle is symmetric about Yaxis. Note that the top edge coincides with X-axis.
[3] Details view of the extrusion. Remember to click <Generate>.
[2] Extrude 200 mm. For details, see [3].
126�
Exercise 13. Lift Fork�
Skin/Loft
Now we want to create a single prong, or nger. The prong is then duplicated to create other prongs. The prong's cross section is not uniform. You cannot create the prong using <Extrude> or <Sweep>. A more general way to create a solid or surface of different cross sections along its path is using <Skin/Loft>. <Skin/Loft> takes a series of proles from different planes and creates a solid that ts through these proles. � You may view <Sweep> as a generalization of <Extrude>, and <Skin/Loft> as a generalization of <Sweep>.
13-4 Create Three Planes Based on a Face of the Beam
[1] All three planes will be created based on this face. When you select the face, make sure the coordinate system is attached at the bottom-right corner and the directions of the axes are the same as global axes. [2] Create <Plane4>, see [3].
[4] Create <Plane5>, see [5].
[6] Create <Plane6>, see [7]. [3] Details of <Plane4>.
[7] Details of <Plane6>.
[5] Details of <Plane5>.
Exercise 13. Lift Fork �
127
13-5 Create a Sketch on Each Plane
[1] Create this sketch on <Plane4>. This becomes <Sketch2>.
[2] Create this sketch on <Plane5>. This becomes <Sketch3>.
[3] Create this sketch on <Plane6>. This becomes <Sketch4>.
[1] Click <Skin/Loft> on the toolbar. [2] Control-select <Sketch2>, <Sketch3>, and <Sketch4> (the order is important) in the model tree, and click <Apply>. Note that a grey lofting guide line appears. If your guide line is not correct, it can be resolved by right-clicking anywhere and selecting <Fix Guide Line> to redene the lofting guide line.
[5] The prong is created as a frozen body, because we don't want the prong to join the transversal beam for now.
[4] Click <Generate>.
[3] Select <Add Frozen>.
128�
Exercise 13. Lift Fork�
13-7 Duplicate the Prong Using <Pattern>
[3] Click <Apply>.
[4] Click the yellow area to bring up <Apply/ Cancel>.
[1] Select <Create/ Pattern>. [5] Select this edge.
[8] Click <Apply>.
[9] Type 480 (mm) for <Offset> and 3 for <Copies>.
[7] Click an arrow to switch the direction. [2] Select the prong body.
[6] If the direction is not like this...
[10] Click <Generate>.
Exercise 13. Lift Fork �
129
13-8 Combine the Bodies Using <Boolean>
[2] The default operation is <Unite>. [3] Control-select all ve bodies and click <Apply>.
[1] Select <Create/ Boolean>.
[4] Click <Generate>.
Wrap Up
Close DesignModeler, save the project as "Fork," and exit the Workbench.
130�
Exercise 14. Caster Frame�
Exercise 14
Caster Frame
14-1 Introduction
In this exercise, we'll create a 3D solid model for a caster frame, of which the details are shown in the multiview drawings below. A coordinate system is also shown in the gure.
X 10 D25 D35 D17.5
64
Unit: mm. Fillets and rounds: R3 Y
Z Y
10
R15 R10 28 X 10 92 Z
10
50
76 126
10 13
D32
D21.5
Exercise 14. Caster Frame �
131
14-2 Start Up DesignModeler
[1] Launch ANSYS Workbench and create a <Geometry> system.
[2] Double-click <Geometry> cell to start up the DesignModeler. Select <Millimeter> as the length unit.
14-3 Create A Quarter of Main Body
[4] Click <Extrude>.
[1] Click <ZXPlane> to make it active.
[2] Click to switch to <Sketching Mode>.
[3] Draw a rectangle of 50x32 (mm.). In this exercise, we'll sketch in 3D view (rather than plane view).
132�
Exercise 14. Caster Frame�
[7] Click <Generate>. [5] Select <Sketch1> in the model tree.
[6] And click <Apply>.
[8] Click <New Plane>.
[11] Click <Generate>.
[9] Select <From Face>.
[10] Click the yellow area to bring up <Apply/ Cancel> buttons and select the face with the coordinate system as shown.
Exercise 14. Caster Frame �
133
[12] Switch to <Sketching Mode> and use <Draw/ Polyline> to draw a sketch like this on the newly created plane (Plane4).
[13] Click <Extrude>.
[14] Click <Generate>.
134�
Exercise 14. Caster Frame�
[15] Click <New Plane>.
[16] Select the face with the coordinate system as shown. [17] Click <Generate>.
[18] Switch to <Sketching Mode> and draw a sketch like this on the newly created plane (Plane5).
Exercise 14. Caster Frame �
135
[19] Click <Extrude>.
[20] Click <Generate>.
[21] Click <New Plane>.
[22] Select the face and the coordinate system as shown.
[23] Click <Generate>.
136�
Exercise 14. Caster Frame�
[24] Switch to <Sketching Mode> and draw a sketch like this on the newly created plane (Plane6).
[25] Click <Extrude>.
[26] Click <Generate>.
Exercise 14. Caster Frame �
137
[27] Select <Create/Body Operation> from the pull-down menu and select the solid body.
[28] Select <XYPlane> from the model tree. Click <Generate>.
[29] Select <Create/Body Operation> from the pull-down menu and select the solid body.
[30] Select <YZPlane> from the model tree. Click <Generate>.
138�
Exercise 14. Caster Frame�
14-4 Create the Shaft
[1] Select <Create/Primitives/ Cylinder> from the pull-down menu; click here to bring up <Apply/Cancel> buttons and select <ZXPlane> from the model tree.
[2] Select <Create/ Primitives/Cylinder> from the pull-down menu and select <ZXPlane> from the model tree.
Exercise 14. Caster Frame �
139
[3] Select <Create/ Primitives/Cylinder> from the pull-down menu and select <ZXPlane> from the model tree.
14-5 Create the Bearing
[1] Select <Create/ Primitives/Cylinder> from the pull-down menu and select <YZPlane> from the model tree.
140�
Exercise 14. Caster Frame�
[2] Select <Create/ Primitives/Cylinder> from the pull-down menu and select <YZPlane> from the model tree.
[3] Select <Create/ Primitives/Cylinder> from the pull-down menu and select <YZPlane> from the model tree.
Exercise 14. Caster Frame �
141
14-6 Create Rounds
[2] Control-select these four edges.
[1] Select <Blend/ Fixed Radius>.
[6] Control-select these two edges.
[3] And click <Apply>.
[4] Click <Generate>.
[5] Select <Blend/ Fixed Radius> again.
[7] And click <Apply>.
[8] Click <Generate>.
142�
Exercise 14. Caster Frame�
14-7 Create Fillets
[2] Select this edge.
[1] Select <Blend/ Fixed Radius>.
[4] The selection extends to its limits. [3] Select <Extend Selection/Extend to Limits>.
[6] Click <Apply>.
[5] Control-select other edges. Totally 18 edges (also see [8, 9]). Whenever necessary, rotate the view and use <Extend Selection/ Extend to Limits>.
[7] Click <Generate>.
[9] There are 2 llets if you view from bottom.
[8] Fillets viewed from top.
Exercise 14. Caster Frame �
143
14-8 Create Additional Rounds
[1] Select <Blend/ Fixed Radius>.
[2] Control-select these edges. Totally 42 edges (also see [5]). Whenever necessary, rotate the view and use <Extend Selection/ Extend to Limits>.
[3] Click <Apply>.
[4] Click <Generate>. [6] Select <View/ Shaded Exterior> to hide all edges.
[5] You can see all rounds if you view from top.
Wrap Up
Close DesignModeler, save the project as "Caster," and exit the Workbench.
144�
Section C. Assembly Modeling�
Section C
Assembly Modeling
An assembly consists of two or more parts. The DesignModeler assigns a color for each part in an assembly. Creating a simple assembly is straightforward, but you have to take case so that parts are not bonded together. This usually can be done by freezing the existing parts. Exercise 15 is an example of creating a simple assembly. Creating complex assemblies involves transformations (translations, rotations, etc.) of parts to appropriate positions. Exercises 16 and 17 demonstrate these techniques.
Exercise 15. Threaded Shaft Assembly�
145
Exercise 15
Threaded Shaft Assembly
15-1 Introduction
In this exercise, we'll create a threaded shaft assembly [1] shown in the gure below. The assembly consists of four parts: the threaded shaft created in Exercise 12, a handle, and two hinges. We adopt a coordinate system which is the same as that used in Exercise 12. This assembly is simple enough that all parts can be created with referring to the same coordinate system. More complicated cases involve transformations (translations, rotations, etc.) of the parts (eg., Exercises 16 and 17).
[1] The threaded shaft assembly is a sub-assembly of a clamping mechanism.
0.3
Y Unit: in.
75
X
D0
.75
0.1 0.7 D0 .75 0.1 00 5 D0 25 .25
875
3.0
5 0.2
D0
6 .26 2.0
5.0 00
63
0.2
19
Z
146�
Exercise 15. Threaded Shaft Assembly
15-2 Start Up DesignModeler
[1] Launch ANSYS Workbench and open the project "Shaft," which was saved in Exercise 12.
[2] Double-click <Geometry> to start up DesignModeler. Due to the complexity of the threads, it may take a while to open the model.
[3] Right-click <Solid> and select <Rename> from the context menu.
[4] Change the part name to "Shaft."
Exercise 15. Threaded Shaft Assembly�
147
15-3 Create the Handle
[1] Select <Tool/Freeze> from the pull-down menu. The body become <Frozen>. By default, frozen bodies are displayed as transparent. This can be turned off by selecting <View/Frozen Body Transparency> from the pull-down menu.
[2] A <Freeze1> object is inserted.
Freeze Existing Bodies Before Creating New Parts
Remember, a body is either active (non-transparent) or frozen (transparent). Active bodies are automatically join (unite) together to form a single body if they overlap each other. Here, we freeze the existing bodies, so that the newly created body doesn't join the existing bodies and, in effect, becomes a new part.
[3] Select <Create/Primitives/ Cylinder> from the pull-down menu and set up the <Details View> as shown. Click <Generate>.
[4] Rename the new part as "Handle."
148�
Exercise 15. Threaded Shaft Assembly
15-4 Create the End Hinge
[1] Select <Create/Primitives/ Cylinder> from the pull-down menu and set up the <Details View> as shown. Click <Generate>.
[2] The newly created body (which is active) doesn't overlap with the handle (which is also active), therefore it becomes a separate part.
[3] Select <Create/ Primitives/Cylinder> from the pull-down menu and set up the <Details View> as shown. Click <Generate>.
[5] Rename the new part as "EndHinge."
[4] The two newly created bodies (both are active) join together to form a single part.
Exercise 15. Threaded Shaft Assembly�
149
[6] Select <Create/Boolean> from the pull-down menu and select <Subtract> for <Operation>.
[7] In the graphics window, select the body "EndHinge" as <Target Bodies>.
[9] Select <Yes> for <Preserve Tool Bodies>.
[8] In the graphics window, select the body "Shaft" as <Tool Bodies>.
[10] Click <Generate>.
[11] Right-click "EndHinge" and select <Hide All Other Bodies> from the context menu.
[13] Right-click anywhere in the graphics window and select <Show All Bodies> from the context menu.
[12] The nished "EndHinge."
150�
Exercise 15. Threaded Shaft Assembly
15-5 Create the Middle Hinge
[1] Select <Create/Primitives/ Cylinder> from the pull-down menu and set up the <Details View> as shown. Click <Generate>.
[2] Select <Create/ Primitives/Cylinder> from the pull-down menu and set up the <Details View> as shown. Click <Generate>.
[4] Rename the new part as "MidHinge."
[3] The two newly created bodies (both are active) join together to form a single part.
Exercise 15. Threaded Shaft Assembly�
151
[5] Select <Create/Boolean> from the pull-down menu and select <Subtract> for <Operation>.
[6] In the graphics window, select the body "MidHinge" as <Target Bodies>.
[8] Select <Yes> for <Preserve Tool Bodies>.
[7] In the graphics window, select the body "Shaft" as <Tool Bodies>.
[9] Click <Generate>. [10] Hide all bodies except the "MidHinge."
[11] Show all bodies.
[12] Select <View/Frozen Body Transparency> to turn off the transparent display of the frozen bodies.
Wrap Up
Close DesignModeler, save the project ("Shaft"), and exit the Workbench.
152�
Exercise 16. Universal Joint�
Exercise 16
Universal Joint
16-1 Introduction
In this exercise, we'll create a universal joint shown in the gure below. The assembly consists of four kinds of parts [1-4], of which the yoke [1] was created in Exercise 7. A coordinate system for the assembly is also shown in the gure [5]. The assembly created in this exercise is simple enough that we will create all parts in a single <Geometry> system. For more complicated cases (eg., Exercises 17), multiple <Geometry> systems may be a better management scheme. � The universal joint is adapted from a working drawing in the book Technical Graphics Communication, by G. R. Bertoline, E. N. Wiebe, C. L. Miller, and J. L. Mohler. Y [1] 2 x Yoke (created in Exercise 7).
[5] Coordinate system for the assembly.
Unit: in.
[4] 4 x Pin. D0.50, L1.35.
X [2] Swivel. OD1.00, ID0.50, L2.15. [3] 4 x Bushing. OD0.75, ID0.50, L0.60.
Exercise 16. Universal Joint�
153
16-2 Start Up DesignModeler
[1] Launch ANSYS Workbench and open the project "Yoke," which was saved in Exercise 7. [2] Save the project as a new name "Joint." [3] Double-click <Geometry> to start up DesignModeler.
Coordinate Systems
There is a coordinate system for the entire assembly, called a global coordinate system; each part has its own coordinate system, called a local coordinate system. � Here, the coordinate system set up in 16-1 is the global coordinate system [4], and the coordinate system dened in 7-1, used to create the yoke, is a local coordinate system [5]. � In order to position the yoke in the global coordinate system, we need to move the yoke upward (in Y direction) by 1.50 in.
Y ,Y
[5] The coordinate system of the part.
[4] The coordinate system of the assembly.
154�
Exercise 16. Universal Joint�
16-3 Move the Yoke Upward
[1] Select <Create/Body Operation> from the pull-down menu and select <Translate>. [6] Select <Tools/Freeze> to freeze the upper yoke.
[2] In the graphics window, select the solid body.
[4] Type 1.5 (in.) for <Y Offset>. It refers to the global coordinate system. Click <Generate>.
[3] Select <Coordinates> for <Direction Denition>.
[5] Rename the body as "UpperYoke."
16-4 Create Lower Yoke
[1] Select <Create/Body Operation> and select <Mirror>.
[3] Select <ZXPlane> from the model tree. Click <Generate>.
[2] Select "UpperYoke," either from the model tree or from the graphics window.
[4] Rename the new body (which is also frozen) as "LowerYoke."
Exercise 16. Universal Joint�
155
[5] Select <Create/ Body Operation>.
[9] Select <Selection Filter: Model Faces>.
[13] Click <Generate>.
[10] Select this circular face. This denes a direction, which is normal to the face, i.e., a vertical direction. You also can click <Display Plane> to turn on the plane display, and then dene the direction by selecting the vertical axis.
[6] Select <Rotate>. [7] Select "LowerYoke."
[12] Click the yellow area and click <Apply>.
[8] Type 90 (degrees).
[11] You can click here to switch the direction. However, in this case, it doesn't matter whether it is upward or downward.
Selection Filters
By activating a selection lter [9], you can make one of four types of entities (points, edges, faces, and bodies) selectable. By rightclicking the graphic area, selection lters can also be accessed through the context menu, where additional lters are available [15]. Multiple lters can be activated at the same time. [15] More selection lters can be accessed through the context menu.
[14] Now, the lower yoke rotates 90 degrees.
156�
Exercise 16. Universal Joint�
16-5 Create the Swivel
[1] Select both bodies and right-click-select <Hide Body>. In order to focus on the swivel, we hide the existing bodies.
[2] Select <Create/ Primitives/Cylinder> from the pull-down menu and set up the <Details View> as shown. Click <Generate>.
[3] The body is active (nontransparent), since it is created with <Add Material> option.
[4] Select <Create/ Primitives/Cylinder> and set up the <Details View> as shown. Click <Generate>.
[5] The new material adds to the existing active body.
Exercise 16. Universal Joint�
157
[6] Select <Create/ Primitives/Cylinder> and set up the <Details View> as shown. Click <Generate>.
[7] Select <Create/ Primitives/Cylinder> and set up the <Details View> as shown. Click <Generate>.
[9] Select <Tools/ Freeze> to freeze the swivel.
[8] Rename the body as "Swivel."
[10] Right-click anywhere in the graphics window and select <Show All Bodies>.
158�
Exercise 16. Universal Joint�
16-6 Create a Pin
[1] Select <Create/ Primitives/Cylinder> and set up the <Details View> as shown. Click <Generate>. [2] The cylinder starts from a yoke's face (see [4]).
[3] The cylinder extends to the negative direction.
[4] The cylinder's outer face aligns with a yoke's face. Also, the cylinder is created as frozen to avoid joining the bushing to be created next (16-7).
16-7 Create a Bushing
[5] Rename the body as "Pin1."
[1] Select <Create/ Primitives/Cylinder> and set up the <Details View> as shown. Click <Generate>.
[2] The cylinder starts from a swivel's face (see [3]).
[3] The cylinder's inner face aligns with a swivel's face. Also, the cylinder is created as active because we haven't nished the part (the part has a hole).
[4] Hide all other bodies.
Exercise 16. Universal Joint�
159
[5] Select <Create/ Primitives/Cylinder> and set up the <Details View> as shown. Click <Generate>.
[6] The material is cut from the active bodies.
[7] Show all bodies.
[8] Rename the body as "Bushing1."
16-8 Create Other Pins and Bushings
[1] Select <Create/ Pattern> and select <Circular>.
[2] Select both "Pin1" and "Bushing1". You can either select them from the model tree or from the graphics window. [4] Type 3. The bodies are duplicated 3 times. Click <Generate>. [3] In the graphics window, select the vertical axis. If the coordinate axes doesn't display, see [5].
[5] If the coordinate axes doesn't display, click <Display Plane>.
160�
Exercise 16. Universal Joint�
[6] Rename the bodies as shown.
[8] Show all bodies and select <View/Frozen Body Transparency>.
[7] Hide "UpperYoke" and "LowerYoke" to view the details inside.
[9] The objects here records the history of creating the model.
[10] The parts (bodies) here are to be exported outside the DesignModeler, for example, to <Mechanical>.
Exercise 16. Universal Joint�
161
16-9 Create an Exploded Model
[1] Select <Create/Body Operation> from the pull-down menu and select <Translate>.
[2] In the model tree, controlselect UpperYoke, Bushing2, Bushing4, Pin2, and Pin4.
[3] Select <Coordinates> for <Direction Denition>. [4] Type 5 (in.) for <Y Offset>. Remember, it refers to the global coordinate system. Click <Generate>.
[5] Select <Create/Body Operation> and, in the model tree, control-select LowerYoke, Bushing1, Bushing3, Pin1, and Pin3.
[6] Type -5 (in.) for <Y Offset>. Click <Generate>.
162�
Exercise 16. Universal Joint�
[7] Select <Create/Body Operation> and, in the model tree, control-select Bushing2 and Pin2. Set up other options and click <Generate>.
[8] Select <Create/Body Operation> and, in the model tree, control-select Bushing4 and Pin4. Set up other options and click <Generate>.
[9] Select <Create/Body Operation> and, in the model tree, control-select Bushing1 and Pin1. Set up other options and click <Generate>.
[10] Select <Create/Body Operation> and, in the model tree, control-select Bushing3 and Pin3. Set up other options and click <Generate>.
Exercise 16. Universal Joint�
163
[11] Select <Create/ Body Operation> and, in the model tree, select Bushing2. Set up other options and click <Generate>.
[12] Select <Create/ Body Operation> and, in the model tree, select Bushing4. Set up other options and click <Generate>.
[13] Select <Create/ Body Operation> and, in the model tree, select Bushing1. Set up other options and click <Generate>.
[14] Select <Create/ Body Operation> and, in the model tree, select Bushing3. Set up other options and click <Generate>.
164�
Exercise 16. Universal Joint�
[15] Control-select the last 10 objects and right-clickselect <Suppress>.
Suppress Objects vs. Hide Bodies
When a body is hidden, the body is not deleted from the model; it is just a visual effect to keep from being seen; the body still exists. � When an object is suppressed, however, it has exactly the same effect as being deleted. We usually prefer "suppress" to "delete," since a suppressed object always can be "unsuppressed." � Now, select the 10 objects again and right-click-select <Unsuppress> from the context menu; the model would explode again. Using this method, you can explode or un-explode a model as you like.
Wrap Up
Close DesignModeler, save the project ("Joint"), and exit the Workbench.
Exercise 16a. Dynamic Simulation of the Universal Joint�
165
Appendix:
Exercise 16a
Dynamic Simulation of the Universal Joint
16a-1 Introduction
Y
In this exercise, we'll perform a dynamics simulation for the assembly created in Exercise 11. The assembly is entirely made of steel, which is the default material used in <Mechanical>. � We assume a hinge set up at the top of the upper yoke, such that the whole assembly can swing in the XY plane and behaves like a double-pendulum [1]. Initially, the lower yoke is raised to form an angle of 30 degrees with the vertical axis, and then released [2]. The only external force, other than the reaction forces at the hinge, acting on the assembly is the gravitational force. We want to observe the double-pendulum behavior of the assembly. � Since our concern is the double-pendulum behavior of the assembly, the body deformation can be neglected. Therefore, we assume all bodies are rigid. We'll use a built-in system in the Workbench, called <Rigid Dynamics>, which assumes all bodies are rigid and has capabilities of performing rigid-body dynamic simulations. � We'll further assume that the combination of the swivel, four bushings, and four pins is an integrated part, i.e., they are bonded together. This assumption should be reasonable as long as the double-pendulum behavior is the only concern. This assumption not only simplies the model setup in <Mechanical> but also reduces computation time.
[1] In this simulation, we'll assume a hinge set up here, such that the whole assembly can swing in the XY plane and behaves like a double-pendulum.
30 �
[2] Initially, the lower yoke is raised to form an angle of 30 degrees with the vertical axis, and then released.
166�
Exercise 16a. Dynamic Simulation of the Universal Joint
16a-2 Group 9 Parts to Form an Integrated Part
[1] Lunch Workbench and open the project "Joint," which was saved in Exercise 16.
[2] Double-click <Geometry> to start up <DesignModeler>.
[3] Select all bodies except "UpperYoke" and "LowerYoke," and right-clickselect <Form New Part>.
[4] This is called a multi-body part. In <Mechanical>, it is treated as an integrated part, i.e., all bodies are bonded together. Close <DesignModeler>.
Exercise 16a. Dynamic Simulation of the Universal Joint�
167
16a-3 Start Up <Mechanical>
[3] The two systems share the same <Geometry>. You can edit up-stream cell but not the down-stream cell.
[1] Drag <Rigid Dynamics> and drop to <Geometry> cell of the <Geometry> system. [4] Double-click <Model> to start up <Mechanical>.
[2] A <Rigid Dynamics> system is created.
[5] <Mechanical GUI> shows up. If your GUI layout is not like this, pull-down-select <View/Windows/Reset Layout> and select <Graphics> tab (11a-2[8]).
[6] If the unit system is not like this, pull-down-select <Unit/U.S. Customary (in, lbm, lbf, F, s,V, A)> (11a-2[10]).
168�
Exercise 16a. Dynamic Simulation of the Universal Joint
16a-4 Create a Revolute Joint
[1] Select <Contacts> and right-click-select <Delete> from the context menu.
Why Delete Contacts?
When a model is rst time brought into <Mechanical>, the <Mechanical> automatically sets up connections between parts; these automatic setups are often not adequate. Here, we decide to manually set up the connections. That's why we deleted the automatic setups.
[2] While <Connections> in the project tree is still highlighted, select <BodyBody/Revolute>. [6] The graphics window splits into three windows. The upperright window will show the reference body, and the lowerright window will show the mobile body.
[5] Click to activate <Body Views>.
[3] A revolute joint is created.
[4] In <Details View>, we need to specify a reference body and a mobile body.
Exercise 16a. Dynamic Simulation of the Universal Joint�
169
[10] A revolute joint allows the mobile body rotates in Z direction.
[8] Click anywhere on the upper yoke.
[9] Select this cylindrical face (to dene a reference coordinate system). Zoom-in or rotate the view if necessary. Make sure the Z-axis of the reference coordinate system is in the cylinder axis; directions of the other two axes are not important. A revolute joint allows the mobile body rotates in Z direction (see [10]).
[7] Click the yellow area to bring up <Apply/Cancel> buttons.
[11] Click <Apply>.
[13] Click the swivel (or anywhere of the integrated part).
[12] Click the yellow area to bring up <Apply/Cancel> buttons.
[15] Click <Apply>.
[14] Select this cylindrical face (to dene a rotational axis). Zoom-in or rotate the view if necessary. Note that the reference coordinate system dened in [9] also shows here.
170�
Exercise 16a. Dynamic Simulation of the Universal Joint
[15] This completes the creation of a revolute joint, in which the axis of the "Bushing2" allows to rotate in the axis of the cylinder hole. We now proceed to create other revolute joints.
16a-5 Create Other Revolute Joints
[1] Select <BodyBody/Revolute>.
[2] Select the cylindrical face of another hole of the upper yoke to dene a reference coordinate system (see the upper-right window). Remember to make sure the Zaxis of the reference coordinate system is in the cylinder axis; directions of the other two axes are not important.
[3] Select the cylindrical face of the "Bushing4" to dene a rotational axis (see the lower-right window).
Exercise 16a. Dynamic Simulation of the Universal Joint�
171
[4] Select <BodyBody/Revolute>.
[5] Select the cylindrical face of a hole of the lower yoke to dene a reference coordinate system (see the upper-right window).
[6] Select the cylindrical face of the "Bushing1" to dene a rotational axis (see the lower-right window).
[7] Select <BodyBody/Revolute>.
[8] Select the cylindrical face of another hole of the lower yoke to dene a reference coordinate system (see the upperright window).
[9] Select the cylindrical face of the "Bushing3" to dene a rotational axis (see the lower-right window).
172�
Exercise 16a. Dynamic Simulation of the Universal Joint
[10] We've dened 4 revolute joints.
16a-6 Create the Hinge
Now, we proceed to create a hinge at the top of the upper yoke (16a-1[1]). In a normal case, this hinge can be modeled by a body-to-ground revolute joint. However, since we don't have any geometric entities (faces, edges, or points) to dene the rotational axis, we choose to create a "general" body-to-ground joint and then specialize to a revolute joint.
[3] Click this circular face. This selects the upper yoke as mobile body and, as the same time, denes a reference coordinate system.
[1] Select <BodyGround/General>.
[5] Select <Free Y> for <Rotations>. This allows the mobile body to rotate in Y direction.
[2] Click the yellow area to bring up <Apply/ Cancel> buttons.
[4] Click <Apply>.
Exercise 16a. Dynamic Simulation of the Universal Joint�
173
16a-7 Set Up Initial Conguration
[1] Click to deactivate <Body Views>.
[4] Click <Congure>. [2] Select <Revolute LowerYoke to Bushing1>.
[3] Click to rotate the view to look at the XY plane.
[6] Or, a better way is that you type 30 (degrees) here.
[8] When you satisfy your initial conguration, click <Set>.
[5] Drag the handle until the lower yoke becomes 30 degrees (or 330 degrees). [7] If you make any mistakes, click <Revert> and go back to step [4].
174�
Exercise 16a. Dynamic Simulation of the Universal Joint
16a-8 Apply Gravitational Force
[2] Select <Inertial/ Standard Earth Gravity>.
[1] Click to highlight <Transient>.
[3] An environment condition is inserted.
[4] Select <-Y Direction>.
16a-9 Insert Result Objects
[2] Select <Deformation/ Total>.
[1] Click to highlight <Solution>.
[3] A results object is inserted.
Exercise 16a. Dynamic Simulation of the Universal Joint�
175
16a-10 Set Up <Analysis Settings>
[1] Click to highlight <Analysis Settings>. [2] Type 3 (s) for <Step End Time>.
16a-11 Solve the Model and View the Results
[1] Click <Solve>.
[4] Totally 442 frames, each from a result set. [2] Click to highlight <Total Deformation>.
[5] Click <Play> to animate the results.
[6] Click <Stop> to stop the animation.
[3] Click <Result Sets>.
[7] By clicking <Export Video File>, the animation can be save as an AVI le.
Wrap Up
Close <Mechanical>, save the project ("Joint"), and exit the Workbench.
176�
Exercise 17. Clamping Mechanism�
Exercise 17
Clamping Mechanism
17-1 Introduction
In this exercise, we'll create the clamping mechanism mentioned in Exercises 1, 8, 12, and 15. Some parts that are not created in the previous exercises are detailed in this page. � Comparing with previous exercises, this exercise is rather complicated. For a complicated model like this, we need more efcient way of handling multiple parts and transforming parts. We'll demonstrate how a geometry can be exported from a <Geometry> system and imported to another <Geometry> system. We'll also demonstrate a more general way of transformation parts. In this way, we need two planes: a source plane and a destination plane. A part then can be transformed just like the source plane is transformed to the destination plane. � The clamping mechanicsm is adapted from a working drawing in the book Technical Graphics Communication, by G. R. Bertoline, E. N. Wiebe, C. L. Miller, and J. L. Mohler.
0.375
D0.312
0.375
1.375 Part Name: Grip D0.25 D0.312
0.375 0.75 Part Name: Pin A Unit: in. D0.25 D0.312
0.3 0.7
75
0.2
5
Grip
0.75 1.125 Part Name: Pin B
Pin A
D0.25
D0.312
Pin C Pin B
0.375 1.125 Part Name: Pin C
0.75
Exercise 17. Clamping Mechanism �
177
17-2 Export the Arm, Support, and Shaft Assembly
[1] Launch ANSYS Workbench and open the project "Arm," which was saved in Exercise 1.
[2] Double-click <Geometry> to start up DesignModeler.
[6] Select <File/Close DesignModeler>.
[3] In DesignModeler, select <File/Export...>.
[5] Type "Arm" as the le name. The exported geometry will be saved as "Arm.x_t."
[4] Select <Parasolid Text> as the le type.
178�
Exercise 17. Clamping Mechanism�
[7] Click <New>.
[9] Open the project "Support," which was saved in Exercise 8.
[10] Double-click <Geometry> to start up DesignModeler. [8] Click <No>.
[14] Select <File/Close DesignModeler>.
[11] In DesignModeler, select <File/Export...>.
[13] Type "Support" as the le name. The exported geometry will be saved as "Support.x_t."
[12] Select <Parasolid Text> as the le type.
Exercise 17. Clamping Mechanism �
179
[15] Click <New>.
[17] Open the project "Shaft," which was saved in Exercise 15.
[18] Double-click <Geometry> to start up DesignModeler. [16] Click <No>.
[22] Select <File/Close DesignModeler>.
[19] In DesignModeler, select <File/Export...>.
[21] Type "Shaft" as the le name. The exported geometry will be saved as "Shaft.x_t."
[20] Select <Parasolid Text> as the le type.
180�
Exercise 17. Clamping Mechanism�
17-3 Create a New Project
[3] Save the new project as "Clamp."
[1] Click <New>. [5] Double-click <Geometry> to start up DesignModeler.
[4] Doubleclick to create a <Geometry> system.
[2] Click <No>.
[6] Select <Inch> as the length unit.
[7] Click <Ok>.
Exercise 17. Clamping Mechanism �
181
17-4 Import the Support
[1] Select <File/Import External Geometry File...> and open the le "Support.x_t."
[4] Click <Generate>. [3] The <Base Plane> determines how the imported geometry positions in the current global coordinate system. Here, <XYPlane> means the imported geometry's coordinate system is to be coincident with the current XYPlane.
[5] Click <Display Plane>.
[6] The imported geometry's coordinate system is coincident with the current XYPlane.
[2] Select <Add Frozen>.
17-5 Translate the Support
[1] Select <Create/Body Operation> from the pull-down menu and select <Translate>. [2] Select the imported body and set up other options as shown. Click <Generate>.
[3] Click Xaxis to look at YZ plane.
[4] Rename the body as "Support1."
182�
Exercise 17. Clamping Mechanism�
17-6 Create the Other Support
[1] Select <Create/Body Operation> from the pull-down menu and select <Mirror>. [4] Click for a isometric view.
[2] Select "Support1."
[3] Select <XYPlane> from the model tree and click <Generate>. [5] Rename the body as "Support2."
17-7 Import the Shaft Assembly
[1] Select <File/Import External Geometry File...> from the pulldown menu and open the le "Shaft.x_t." Select <Add Frozen>. Click <Generate>.
[2] The shaft assembly consists of 4 parts (see [3]).
Exercise 17. Clamping Mechanism �
183
[3] The shaft assembly consists of 4 parts.
17-8 Translate the Shaft Assembly
Now, we want to translate the shaft assembly such that the part "MidHinge" is at its correct position. Calculation of the amount of translation is not a easy task. We now demonstrate a general way of transformation parts. In this way, we need two planes: a source plane and a destination plane. The shaft assembly will be transformed just like the source plane is transformed to the destination plane.
[2] Select <From Face>. [1] Click <New Plane>. [4] Click the yellow area to bring up <Apply/Cancel> button and click <Apply>. Click <Generate>.
[3] Click this ringshaped face. Make sure the three axes have the same directions as the global axes
184�
Exercise 17. Clamping Mechanism�
[6] Select <From Face>. [5] Click <New Plane>. [8] Click the yellow area to bring up <Apply/Cancel> buttons and click <Apply>. Y [9] Select <Yes> for <Reverse Normal/ZAxis>. Click <Generate>. X Z [7] Click the inner face of the "Support1" at a location near the arc. Make sure the three axes are like this. Now, we want to reverse the Z-axis so that the three axes have the same directions as the global axes.
[10] Now, the axes of the <Plane4> have the same directions as <Plane5>.
Exercise 17. Clamping Mechanism �
185
[11] Select <Create/ Body Operation> from the pull-down menu and select <Move>.
[12] Select the four bodies of the shaft assembly (Shaft, Handle, EndHinge, and MidHinge), either from the model tree or from the graphics window.
[14] Select <Plane5> as <Source Plane>. Click <Generate>.
[13] Select <Plane4> as <Source Plane>.
[15] Now, we want to tilt the shaft assembly a certain angle. A tedious calculation shows the angle is 9.273 degrees (see [16]).
[16] The two angles shown are calculated from the geometry of the clamp. These angles are needed for the conguration of the parts.
9.273�
46.775�
186�
Exercise 17. Clamping Mechanism�
17-9 Rotate the Shaft Assembly
[1] Select <Create/ Body Operation> from the pull-down menu and select <Rotate>.
[2] Select the four bodies of the shaft assembly (Shaft, Handle, EndHinge, and MidHinge).
[4] Bring up <Apply/Cancel> [3] Type 9.273 (degrees) for <Angle>.
[6] Select this circular face. Its outer normal denes a rotational axis (see next step).
[8] Click <Apply>. Click <Generate>.
[7] Click to reverse the direction.
[5] Click <Selection Filter: Model Faces>
[9] Now the shaft assembly is at its correct position and orientation.
Exercise 17. Clamping Mechanism �
187
17-10 Import the Arm
Remember that the origin of the arm is at the center of a hole (see 1-1). We now want to import the arm such that the hole connects to the "EndHinge" to form a revolute joint.
[2] Select <From Face>.
[1] Click <New Plane>.
[4] Click the yellow area to bring up <Apply/Cancel> button and click <Apply>. Click <Generate>.
[3] Click this ring-shaped face. Make sure the three axes have the same directions like this.
[6] By default, the currently active plane is the base plane.
[5] Select <File/Import External Geometry File...> from the pull-down menu and open the le "Arm.x_t." Select <Add Frozen>. Click <Generate>.
[6]Next, we need to rotate the arm 46.775 degrees clockwise (see 17-8[16]).
188�
Exercise 17. Clamping Mechanism�
17-11 Rotate the Arm
[1] Select <Create/ Body Operation> from the pull-down menu and select <Rotate>.
[2] Select the arm.
[4] Bring up <Apply/Cancel>
[3] Type 46.775 (degrees) for <Angle>.
[8] Click <Apply>. Click <Generate>.
[7] If necessary, click here to reverse the direction.
[5] Click <Selection Filter: Model Faces> [6] Select this cylindrical face. the cylinder axis denes a rotational axis (see next step).
[9] Now the arm is at its correct position and orientation.
[10] Rename the body as "Arm1."
Exercise 17. Clamping Mechanism �
189
17-12 Create the Other Arm
[1] Select <Create/Body Operation> from the pull-down menu and select <Mirror>.
[2] Select "Arm1."
[3] Select <XYPlane> from the model tree and click <Generate>.
[4] The second arm.
[5] YZ plane view. Note that there is a gap between an arm and a support.
[6] Rename the body as "Arm2."
190�
Exercise 17. Clamping Mechanism�
17-13 Create the Grip
[2] Select <From Face>. [3] Click the yellow area to bring up <Apply/Cancel> buttons. [5] Click <Apply>. [6] Select <Align X-Axis with Global> for <Transform 1>. [1] Click <New Plane>.
[7] Select <Offset Z> for <Transform 2>. [8] Type 0.1875 (in.) for <Value>. Click <Generate>.
[4] Select this face. Make sure the axes are like this.
[7] The X-axis rotates to align with the global X-axis.
Exercise 17. Clamping Mechanism �
191
[11] The plane outline.
[9] The plane should lie on the global XY plane.
[10] In the newly created plane (Plane7), draw a sketch like this. The sketch consists of a rectangle and a circle centered at the origin and with a diameter of 0.312 (in.).
[12] Extrude the new sketch (Sketch1) 0.125 (in.) both sides symmetrically.
[13] Rename the body as "Grip."
192�
Exercise 17. Clamping Mechanism�
17-14 Create Pin A
[1] Select <Create/Primitives/Cylinder> and select the new plane (Plane7) from the model tree as the <Base Plane>. Set up the <Details View> as shown. Click <Generate>.
[2] If you hide all other bodies, you would see the new body like this.
[3] Select <Create/Primitives/Cylinder> and select the new plane (Plane7) from the model tree as the <Base Plane>. Set up the <Details View> as shown. Click <Generate>.
[4] Pin A.
[5] Rename the body as "PinA."
Exercise 17. Clamping Mechanism �
193
17-15 Create Pin B
[1] Select <Create/Primitives/Cylinder> and select the XYPlane from the model tree as the <Base Plane>. Set up the <Details View> as shown. Click <Generate>.
[2] If you hide all other bodies, you would see the new body like this.
[3] Select <Create/Primitives/Cylinder> and selectXYPlane from the model tree as the <Base Plane>. Set up the <Details View> as shown. Click <Generate>.
[4] Pin B.
[5] Pin B should be positioned here...
[6] And here.
194�
Exercise 17. Clamping Mechanism�
[1] Select <Create/Body Operation> and select <Translate>. [2] Select the new body.
[3] Type -1.25 (in.) for <X Offset> (see the details in 8-1). Click <Generate>. [4] Select <Create/ Body Operation> and select <Translate>.
[5] Select the new body.
[6] Select<Yes> for <Preserve Bodies?>
[7] Type 1.25 (in.) for <Y Offset> (see the details in 8-1). Click <Generate>.
[8] Rename two new bodies as "PinB1" (lower pin) and "PinB2" (upper pin) respectively.
Exercise 17. Clamping Mechanism �
195
17-16 Create Pin C
[1] Select <Create/Primitives/Cylinder> and select XYPlane from the model tree as the <Base Plane>. Set up the <Details View> as shown. Click <Generate>.
[2] If you hide all other bodies, you would see the new body like this.
[3] Select <Create/Primitives/Cylinder> and select XYPlane from the model tree as the <Base Plane>. Set up the <Details View> as shown. Click <Generate>.
[4] Pin A.
[5] Rename the body as "PinC."
196�
Exercise 17. Clamping Mechanism�
17-17 Enhance Visual Effects
[1] Select <Edge Coloring/Black>. It instructs DesignModeler to render the model with black edges.
[2] Select <View/Frozen Body Transparency> to turn off the transparent display of the frozen bodies.
Wrap Up
Close DesignModeler, save the project ("Clamp") and exit the Workbench.
Exercise 17a. Simulation of the Clamping Mechanism �
197
Appendix:
Exercise 17a
Simulation of the Clamping Mechanism
17a-1 Introduction
The clamping mechanism created in Exercise 17 is designed to provide clamping forces up to 450 lbf [1]. In this exercise, we'll perform a simulation to make sure that, under the clamping force of 450 lbf, the stresses everywhere are within the allowable stress of the steel, which is 30,000 psi. Remember that the clamping mechanism is entirely made of steel, which is the default material used in <Mechanical>. � We'll assume an initial conguration such that the grip merely contacts the clamped object and the clamping force is zero [2, 3]. As the handle rotates to increase the distance between two hinges, the clamping force also increases, until the clamping force reaches 450 lbf [4-6].
[4] The middle hinge.
[6] As the handle rotates to increase the distance between two hinges, the clamping force also increases, until the clamping force reaches 450 lbf.
[5] The end hinge.
[2] The initial distance between two hinges is 3.063 in (see 15-1). [1] The clamping mechanism is designed to provide clamping forces up to 450 lbf.
[3] With the initial conguration, the grip merely contacts the clamped object and the clamping force is zero.
198�
Exercise 17a. Simulation of the Clamping Mechanism
17a-2 Simplify the Model
[1] Launch ANSYS Workbench and open the project "Shaft," which was saved in Exercise 15.
[2] Double-click <Geometry> to start up DesignModeler.
[3] Right-click <Sweep1> and select <Suppress> from the context menu.
Exercise 17a. Simulation of the Clamping Mechanism �
199
[8] Select <File/Close DesignModeler>.
[5] In DesignModeler, select <File/Export...>.
[4] The threads are removed. This is a simplication of the model to make the simulation easier, without sacrice too much accuracy.
[7] Type "Shaft1" as the le name. The exported geometry will be saved as "Shaft1.x_t." [9] In <Workbench GUI>, Click <New>. [6] Select <Parasolid Text> as the le type.
[11] Open the project "Clamp," which was saved in Exercise 17. [12] Double-click <Geometry> to start up <DesignModeler>.
[10] Click <No>.
200�
Exercise 17a. Simulation of the Clamping Mechanism
[13] Select <Import2>, which is the shaft assembly.
[14] Double-click <Source>.
[15] Select "Shaft1.x_t," which was save in [5-7].
[16] Click <Generate>.
Exercise 17a. Simulation of the Clamping Mechanism �
201
[19] Control-select "Support1," "Support2," "PinB1," "PinB2," and "PinC," and right-clickselect <Form New Part>.
[17] Control-select "Shaft," "Handle," and "EndHinge," and right-click-select <Form New Part>.
[18] Rename the new part as "ShaftAssembly." The three bodies are now treated as an integrated part. It is not real; it is a simplication to make the simulation easier.
[21] Control-select "Grip" and "PinA," and right-click-select <Form New Part>.
[20] Rename the new part as "SupportAssembly." The ve bodies are now treated as an integrated part. Again, it is not real; it is a simplication to make the modeling easier.
[22] Rename the new part as "GripAssembly." The two bodies are now treated as an integrated part. Close DesignModeler.
[23] Close DesignModeler.
202�
Exercise 17a. Simulation of the Clamping Mechanism
17a-3 Start Up <Mechanical>
[3] The two systems share the same <Geometry>. You can edit up-stream cell but not the down-stream cell.
[4] Double-click <Model> to start up <Mechanical>.
[1] Drag <Static Structural> and drop to <Geometry> cell of the <Geometry> system.
[2] A <Static Structural> system is created.
[5]If your GUI layout is not like this, pull-down-select <View/Windows/ Reset Layout> and select <Graphics> tab (11a-2[8]).
[6] If the unit system is not like this, pull-down-select <Unit/U.S. Customary (in, lbm, lbf, F, s,V, A)> (11a-2[10]).
Exercise 17a. Simulation of the Clamping Mechanism �
203
17a-4 Create Revolute Joints
There are 8 revolute joints to be created: [1] PinA to Arm1, [2] PinA to Arm2, [3] EndHinge to Arm1, [4] EndHinge to Arm2, [5] MidHinge to Support1, [6] MidHinge to Support2, [7] PinC to Arm1, and [8] PinC to Arm2.
[3] EndHinge to Arm1. [4] EndHinge to Arm2. [5] MidHinge to Support1. [6] MidHinge to Support2.
[1] PinA to Arm1. [2] PinA to Arm2.
[7] PinC to Arm1. [8] PinC to Arm2.
[9] Select <Contacts> and right-click-select <Delete> from the context menu. (See 17a-4).
[10] The project tree should look like this. [11] Make sure <Connection> is highlighted.
204�
Exercise 17a. Simulation of the Clamping Mechanism
Create [1] PinA to Arm1, and [2] PinA to Arm2. [13], select <Body-Body/ Revolute>.
[12] While <Connections> is highlighted, click to activate <Body Views>.
[14] Select a cylindrical face of the PinA (see the red-colored face in the upper-right window).
[15] Select a cylindrical face of the Arm1 (see the blue-colored face in the lower-right window). [16], select <Body-Body/ Revolute>.
[17] Select another cylindrical face of the PinA (see the red-colored face in the upper-right window).
[18] Select a cylindrical face of the Arm2 (see the blue-colored face in the lower-right window).
Exercise 17a. Simulation of the Clamping Mechanism �
205
Create [3] EndHinge to Arm1, and [4] EndHinge to Arm2.
[19], select <Body-Body/ Revolute>.
[20] Select a cylindrical face of the EndHinge (see the red-colored face in the upper-right window).
[21] Select a cylindrical face of the Arm1 (see the blue-colored face in the lower-right window). [22], select <Body-Body/ Revolute>.
[23] Select another cylindrical face of the EndHinge (see the redcolored face in the upperright window).
[24] Select a cylindrical face of the Arm2 (see the blue-colored face in the lower-right window).
206�
Exercise 17a. Simulation of the Clamping Mechanism
Create [5] MidHinge to Support1, and [6] MidHinge to Support2. [25], select <Body-Body/ Revolute>.
[26] Select a cylindrical face of the MidHinge (see the red-colored face in the upper-right window).
[27] Select a cylindrical face of the Support1 (see the blue-colored face in the lower-right window).
[28], select <Body-Body/ Revolute>.
[29] Select another cylindrical face of the MidHinge (see the redcolored face in the upperright window).
[30] Select a cylindrical face of the Support2 (see the blue-colored face in the lower-right window).
Exercise 17a. Simulation of the Clamping Mechanism �
207
Create [7] PinC to Arm1, and [8] PinC to Arm2. [31], select <Body-Body/ Revolute>.
[32] Select a cylindrical face of the PinC (see the red-colored face in the upper-right window).
[33] Select a cylindrical face of the Arm1 (see the blue-colored face in the lower-right window).
[34], select <Body-Body/ Revolute>.
[37] We've created 8 revolute joints.
[35] Select another cylindrical face of the PinC (see the redcolored face in the upperright window).
[36] Select a cylindrical face of the Arm2 (see the blue-colored face in the lower-right window).
208�
Exercise 17a. Simulation of the Clamping Mechanism
17a-5 Create a Translational Joint
[5] A translational joint restricts the mobile body sliding along the X direction of the reference coordinate system.
[1], select <Body-Body/ Translational>.
[4] We've created a translational joints.
[2] Select a cylindrical face of the MidHinge (see the red-colored face in the upper-right window).
[3] Select the cylindrical face of the Shaft (see the blue-colored face in the lower-right window).
17a-6 Specify Supports
[2] Select the bottom two faces as xed supports
[1] Highlight <Static Structural> and select <Support/Fixed Support>.
Exercise 17a. Simulation of the Clamping Mechanism �
209
[3] Select <Support/ Frictionless Support> and select the bottom face of the grip as a frictionless support.
17a-7 Specify a Relative Translation between Shaft and MidHinge
Why Specify an Arbitrary Displacement?
Remember that the mechanism is to provide a clamping force of 450 lbf. (17a-1). But we cannot specify a vertical force on the grip, because the grip was xed in the vertical direction (17a-6[3]). This is easy to understand because you cannot specify both displacement conditions and force conditions on the same face. You either specify a xed (zero displacement) condition and try to evaluate the reaction force, or specify a force condition and try to evaluate the resulting displacement. � Our strategy is to specify an arbitrary value of displacement [4] for the relative translation between Shaft and MidHange, to simulate the advance of the shaft due to the rotation of the handle (17a-1[6]), and then to evaluate the clamping force. The displacement [4] then adjusts to give an exact clamping force of 450 lbf.
[1] While <Frictionless Support> is still highlighted, select <Loads/ Joint Load> to insert a joint load.
[2] Select <Translational MidHinge to Shaft>.
[3] Select <Displacement>.
[4] Type 0.003 (in.) for <Magnitude>. This is an arbitrarily chosen value (see an explanation on the right.
210�
Exercise 17a. Simulation of the Clamping Mechanism
17a-8 Insert Results Objects
[1] Highlight <Solution>. [2] Select <Deformation/Total>. [3] Select <Stress/Equivalent (von-Mises)>. [4] Select <Stress/Maximum Principal>. [5] Select <Stress/Minimum Principal>.
[6] Select <Probe/ Force Reaction>. [7] Select <Frictionless Support>.
17a-9 Solve the Model and View the Clamping Force
[1] Click <Solve>.
[3] The clamping force is vertical, because the grip is allowed to move horizontally.
[2] While <Force Reaction> is still highlighted, you can see the clamping force (425.52 lbf) in the details view.
Exercise 17a. Simulation of the Clamping Mechanism �
211
17a-10 Adjust the Joint Displacement and Solve Again
[1] Highlight <Joint Displacement>.
[2] Type 0.003173 (in.) for <Magnitude>. Note: 0.003/425.52x450 = 0.003173
[3] Click <Solve>.
[4] Now, the clamping force is 450 lbf.
212�
Exercise 17a. Simulation of the Clamping Mechanism
17a-11 View Stresses and Animation
[3] Select <Auto Scale>.
[2] The maximum stress is within the allowable value (30,000 psi).
[1] Highlight <Equivalent Stress>.
[4] Click <Play> to animate the results.
[5] Click <Stop> to stop the animation.
17a-12 Evaluate Joint Forces
[1] Highlight <Solution>. [2] Select <Probe/Joint> and, in the details view, select <Revolute - PinA to Arm1> for <Boundary Condition>. [3] Select <Probe/Joint> and, in the details view, select <Revolute - EndHinge to Arm1> for <Boundary Condition>. [4] Select <Probe/Joint> and, in the details view, select <Revolute - MidHinge to Support1> for <Boundary Condition>. [5] Select <Probe/Joint> and, in the details view, select <Revolute - PinC to Arm1> for <Boundary Condition>. [7] Select <Probe/Force Reaction> and, in the details view, select <Fixed Support> for <Boundary Condition>. [6] Select <Probe/Joint> and, in the details view, select <Translation - MidHinge to Shaft> for <Boundary Condition>.
Exercise 17a. Simulation of the Clamping Mechanism �
213
[8] Rename the results objects like this, to make them more readable.
[9] Click <Solve>.
17a-13 Forces Acting on an Arm
[2] Details of "Force EndHinge to Arm1."
[4] The angle is calculated from 17-8[16]. 379.95 61.91 56.048� [1] Details of "Force PinA to Arm1."
225.04 379.94 163.13
[3] Details of "Force PinC to Arm1."
Transform Force Components
It is very easy to transform the above force components into the force components shown in 1a-1[3]. We need to know an angle [4] to accomplish the transformation. The angle can be calculated from 17-8[16].
214�
Exercise 17a. Simulation of the Clamping Mechanism
17a-14 Forces Acting on a Support
[1] Details of "Force MidHing to Support1."
379.94
62.045
[5] There are no forces from PinB2. [3] These force components from PinC have the same magnitudes and opposite directions as those in 17a-13[3].
[4] There are no forces from PinB1.
163.13
379.94
[2] Details of "Force on Bottom Faces." Note that, half of the force (450.06 lbf) acts on a support. 225.03
It is very easy to verify that the above forces acting on a support is self-balanced. Please also see 8a-1[3, 4].
17a-15 Compressive Forces in the Shaft
[1] Details of "Force MidHing to Shaft" shows that a total compressive force of 769.61 lbf acts on the shaft.
Wrap Up
Close <Mechanical>, save the project as "Clamp-a", and exit the Workbench.
Section D. Concept Modeling�
215
Section D
Concept Modeling
As mentioned, although it can be used as a general purpose CAD software, the DesignModeler is particularly designed for creating geometric models to be analyzed (simulated) under the ANSYS environment. So far, we've created many 3D solid models; each can be imported into an analysis application, such as <ANSYS Mechanical>. 3D solid models are not the only models that <ANSYS Mechanical> can analyze. Often, due to the efciency (computing time and solution accuracy), we prefer using simplied models, such as 2D solid models, surface models, or line models. This section provides exercises for creating such simplied model.
216�
Exercise 18. 2D Solid Modeling (Arm)
Exercise 18
2D Solid Modeling (Arm)
18-1 Introduction
When the geometric characteristics in a certain dimension (e.g., the thickness in Z-dimension) can be parameterized and the rest of the geometric characteristics (and the loads) can be expressed in a 2D space (in this example, XYspace), we often simplify the model into a 2D solid model, to facilitate the simulation task. The benets of using a 2D solid model (over a 3D solid model) include reduced modeling time, reduced computing time, increased accuracy, increased post-processing efciency. � In this exercise, we will create a 2D solid model for the arm, which has been modeled as s 3D solid model in Exercise 1
18-2 Start Up DesignModeler
[2] Right-click here and select <Duplicate> from the context menu.
[1] Launch ANSYS Workbench and open the project "Arm," which was saved in Exercise 1.
Exercise 18. 2D Solid Modeling (Arm)�
217
[3] Double-click the name of the system (default to "Geometry") and type "3D Model" to change the name.
[4] Double-click the name of the system (default to "Copy of Geometry") and type "2D Model" to change the name.
[5] Double-click to start up DesignModeler.
[6] Right-click <Extrude1> and select <Delete> from the context menu.
218�
Exercise 18. 2D Solid Modeling (Arm)
18-3 Create a 2D Model
[1] Now, the only object in the model tree is <Sketch1>, which is on <XYPlane>.
[2] Select <Concept/ Surfaces From Sketches>. [6] This is a 2D model for the arm. Note that the 2D model is on XY-plane; <Mechanical> requires a 2D model resides on XY-plane.
[5] Click <Generate>.
[3] Select <Sketch1> from the model tree.
[4] Type 0.125 (in.) for <Thickness>. This information doesn't show in the geometry, but will be brought to a simulation module, such as <Mechanical>.
Wrap Up
Close DesignModeler, save the project as "Arm-2D" and exit the Workbench.
Exercise 18a. Structural Analysis of the Arm Using 2D Model�
219
Appendix:
Exercise 18a
Structural Analysis of the Arm Using 2D Model
18a-1 Introduction
In this exercise, we will perform a static structural analysis for the 2D model created in Exercise 18. We'll use the same boundary conditions (loads and supports) as in Exercise 1a (1a-1[3]). The results (stresses) should be the same as those obtained in Exercise 1a, except that a 2D model is computationally much more efcient.
18a-2 Start Up
[3] Right-click <Geometry> and select <Properties>.
[1] Launch Workbench and open the project "Arm-2D," which was saved in Exercise 18.
[2] Drag <Static Structural> and drop to <Geometry> cell of the <2D Model> system.
220�
Exercise 18a. Structural Analysis of the Arm Using 2D Model
[5] Click to close the properties window.
[4] Select <2D> for <Analysis Type>. It is necessary for a 2D analysis, otherwise, by default, <Mechanical> will perform a 3D analysis.
[6] Click <Model> to start up <Mechanical>.
[7] Click to close the message window.
Exercise 18a. Structural Analysis of the Arm Using 2D Model�
221
18a-3 Specify Loads
[2] Select <Loads/ Force>.
[1] Highlight <Static Structural>.
[3] Select this circular edge.
[4] Click <Apply>.
[5] Select <Components>.
[6] Type -187 (lbf) for <X Component>, and 126 (lbf) for <Y Component>.
[7] Select <Loads/ Force> again.
[8] Select this circular edge. [9] Click <Apply>. [10] Select <Components>.
[11] Type 264 (lbf) for <X Component>, and 281 (lbf) for <Y Component>.
222�
Exercise 18a. Structural Analysis of the Arm Using 2D Model
18a-4 Specify Supports
[1] Select <Supports/ Fixed Support>.
[2] A <Fixed Support> is inserted.
[3] Select this cylindrical face.
[4] Click <Apply>.
18a-5 Insert Result Objects
[2] Select <Stress/ Equivalent (von-Mises)>.
[1] Click to highlight <Solution>.
Exercise 18a. Structural Analysis of the Arm Using 2D Model�
223
18a-6 Solve the Model
[1] Click <Solve>.
[3] Select <Edges/ Show Undeformed WireFrame>. [2] The stress distribution is essentially the same as that is Exercise 1a.
[4] Click <Play> to animate the deformation.
[5] Click <Stop> to stop the animation.
[8] Close <Mechanical>, and in the <Workbench GUI>, save the project as "Arm-2D-a."
[6] Highlight <Mesh>.
[7] There are 779 nodes in the model; that means a total degrees of freedom is 1558 (2x779; for 2D problems, each node has 2 degrees of freedom). The degrees of freedom is an indication of problem size, and it is in turn an indication of computing time.
224�
Exercise 18a. Structural Analysis of the Arm Using 2D Model
18a-7 Open the Project "Arm-a"
[1] In the <Workbench GUI>, Open the project "Arm-a," and start up <Mechanical>.
[2] Highlight <Mesh>.
[7] There are 890 nodes in the model; that means a total degrees of freedom is 2667 (3x890; for 3D problems, each node has 3 degrees of freedom). The ratio of the problem size between the 2D model and the 3D model is 0.58 (1558/2667). That means, in this case, only approximately 58% of computing time is need for the 2D model, to achieve the same solution accuracy.
Wrap Up
Close <Mechanical> and exit the Workbench.
Exercise 19. Surface Modeling (Support)�
225
Exercise 19
Surface Modeling (Support)
19-1 Introduction
When a body in 3D space is thin enough, we often simplify the body into a surface body, to facilitate the simulation task. The benets of using a 3D surface model (over a 3D solid model), similar to a 2D solid over 3D solid, include reduced modeling time, reduced computing time, increased accuracy, increased post-processing efciency. � In this exercise, we will create a 3D surface model for the support, which has been modeled as a 3D solid model in Exercise 8.
19-2 Start Up DesignModeler
[2] Right-click here and select <Duplicate> from the context menu.
[5] Double-click to start up DesignModeler.
[1] Launch ANSYS Workbench and open the project "Surface," which was saved in Exercise 8.
[3] Rename the original system as "3D Solid Model."
[4] Rename the duplicated system as "3D Surface Model."
226�
Exercise 19. Surface Modeling (Support)�
[6] Select Extrude1, Plane4, Extrude2, Plane5, Extrude3, and FBlend1 in the model tree and rightclick-select <Delete> from the context menu.
[7] We've deleted everything except <Sketch1>, which is on <XYPlane>.
Exercise 19. Surface Modeling (Support)�
227
19-3 Create a Surface Body for the Vertical Plate
[4] Click <Generate>.
[1] Select <Concept/ Surfaces From Sketches>.
[5] This is a surface body representing the vertical plate. [6] The global origin is here. Let's move the body to a more convenient location.
[2] Select <Sketch1> from the model tree.
[3] Type 0.125 (in.) for <Thickness>. This information doesn't show in the geometry, but will be brought to a simulation module, such as <Mechanical>.
[11] Click <Generate>.
[7] Select <Create/ Body Operation>.
[12] The body translates so that its lower-left is at the origin. [8] Select <Translate>.
[9] Select the vertical plate. [10] Type 1.625 (in.) for <X Offset> and 0.875 (in.) for <Y Offset>.
228�
Exercise 19. Surface Modeling (Support)�
19-3 Create a Surface Body for the Horizontal Plate
[1] Activate <ZXPlane>.
[2] Switch to <Sketching Mode>.
[3] Draw a sketch like this. Note that, in ZXPlane, the Z-axis is the horizontal axis and the X-axis is the vertical axis.
[4] If you click <Look At Face/Plane/Sketch> and disable model display, you would see the plane view of the sketch like this.
Exercise 19. Surface Modeling (Support)�
229
[4] Click <Generate>.
[1] Select <Concept/ Surfaces From Sketches>.
[2] Select the newly created skectch from the model tree.
[3] Type 0.125 (in.) for <Thickness>.
Wrap Up
Close DesignModeler, save the project as "Support-Surface" and exit the Workbench.
230�
Exercise 19a. Structural Analysis of the Support Using Surface Model�
Appendix:
Exercise 19a
Structural Analysis of the Support Using Surface Model
19a-1 Introduction
In this exercise, we will perform a static structural analysis for the surface model created in Exercise 19. We'll use the same boundary conditions (loads and supports) as in Exercise 8a (8a-1[3, 4]).
19a-2 Start Up
[3] Click <Model> to start up <Mechanical>.
[1] Launch Workbench and open the project "Support-Surface," which was saved in Exercise 19.
[2] Drag <Static Structural> and drop to <Geometry> cell of the <3D Surface Model> system.
Exercise 19a. Structural Analysis of the Support Using Surface Model�
231
19a-3 Specify Loads
[3] Click <Edge>.
[2] Select <Loads/ Force>.
[1] Highlight <Static Structural>.
[4] Select this arc edge.
[5] Click <Apply>.
[6] Select <Components>.
[7] Type -380 (lbf) for <X Component>, and 62 (lbf) for <Y Component>.
[8] Select <Loads/ Force>.
[9] Select this circular edge.
[10] Click <Apply>.
[11] Select <Components>.
[12] Type 380 (lbf) for <X Component>, and 163 (lbf) for <Y Component>.
232�
Exercise 19a. Structural Analysis of the Support Using Surface Model�
19a-4 Specify Supports
[2] Select <Face>.
[1] Select <Supports/ Fixed Support>.
[3] Select the bottom face.
[4] Click <Apply>.
[6] Select <Edge>.
[5] Select <Supports/ Displacement.
[7] Select the 3 circular edges and an arc edge on the vertical plate.
[8] Click <Apply>.
[9] Type 0 (in.) for <Z Component>.
Exercise 19a. Structural Analysis of the Support Using Surface Model�
233
19a-5 Insert Result Objects and Solve the Model
[2] Select <Stress/ Equivalent (von-Mises)>.
[1] Click to highlight <Solution>.
[3] Solve the model.
Wrap Up
Close <Mechanical>, save the project as "Support-Surface-a," and exit the Workbench.
234�
Exercise 20. Line Modeling (Space Truss)�
Exercise 20
Line Modeling (Space Truss)
20-1 Introduction
Consider a space truss subject to design loads as shown [1-4]. Note that each truss member and each connection node (spherical joint) is given an identication number. This example is adapted from a problem in the book Vector Mechanics for Engineers: Statics, by F. P. Beer, E. R. Johnston, and E. R. Eisenberg. The member forces calculated by the textbook are shown in the table below [5]. Note that a plus sign is used to indicate a tensile member force and a minus sign to indicate compressive member force. � The truss is a statically determinate structure, that is, the member forces can be solved using static equilibrium equations without any cross-sectional information. Here, we assume that all members have a circular cross-section of diameter 10 mm. � In this exercise, we'll create a line model for this space truss. In the Exercise 20a, as an appendix, we'll perform a structural analysis to calculate the member forces using this line model. Y
1m
[4] This node is supported in Zdirection. 4 3 4 8 1 9 7 1 5 2 6 Z 2 1m 1 2 3 4 X 5 6 7 8 9 3 [3] This node is supported in Zdirection. [5] Member forces.
[1] This node is supported in Ydirection.
Member
Member Force +400 N -600 N -100 N -200 N 0 -1342 N +1500 N +300 N -566 N
0.5
m 0.5 m
200 N
1m
[2] This node is supported with a hinge, i.e., displacements in all directions are restricted.
1200 N
Exercise 20. Line Modeling (Space Truss)�
235
20-2 Start Up
[3] Double-click <Geometry> to start up <DesignModeler>. Select <Meter> as length unit. [1] Launch <Workbench> and save the project as "Truss."
[2] Double-click to create a <Static Structural> system.
20-3 Create Points for Nodes
[2] Select <Manual Input>.
[3] Type coordinates.
[1] Select <Create/Point>. [4] Click <Generate>.
236�
Exercise 20. Line Modeling (Space Truss)�
Point [5] Repeat steps [1-4] for additional four points (Points 2-5); type their respective coordinates as shown in this table. 1 2 3 4 5
X Coordinate 0m 1m 1m 0m 0.5 m
Y Coordinate 0m 0m 1m 1m 0m
Z Coordinate 0m 0m 0m 0m 1m
[6] The newly created points. 1 [7] The newly created points. (The numbers are not part of the display.)
2 5
20-4 Create Line Bodies for Truss Members
[1] Select <Concept/Lines From Points>.
[2] Click the starting point (Point1)...
[3] And then control-click the ending point (Point2).
[4] Click <Apply>.
[5] Select <Add Frozen>. [6] Click <Generate>.
Exercise 20. Line Modeling (Space Truss)�
237
Line [7] Repeat steps [1-6] for additional 8 lines (Lines 2-9). Each line is created by clicking the starting point and then control-clicking the ending point. Each line is created by <Add Frozen> operation, so that each line body is treated as a separate part. 1 2 3 4 5 6 7 8 9
Start Point Point1 Point2 Point3 Point4 Point1 Point2 Point3 Point4 Point1
End Point Point2 Point3 Point4 Point1 Point5 Point5 Point5 Point5 Point3
[9] Rename the line bodies as shown. [8] Because of the <Add Frozen> operation, each line body is treated as a separate part. 3
4 9 8 2 5 7 6 [10] The newly created line bodies. (The numbers are not part of the display.) 1
238�
Exercise 20. Line Modeling (Space Truss)�
20-5 Create and Assign Cross Section for the Line Bodies
[1] Select <Concept/Cross Section/Circular>.
[2] In the <Details View>, type 0.005 (m) for <R>.
[3] The sectional properties are automatically calculated.
[4] Select all line bodies.
[5] In the <Details View>, select <Circular1> for <Cross Section>.
Exercise 20. Line Modeling (Space Truss)�
239
[6] Turn off <View/ Cross Section Alignments>. [7] Turn on <View/ Cross Section Solids>.
[8] Turn off <Display Plane>.
Wrap Up
Close DesignModeler, save the project ("Truss") and exit the Workbench.
240�
Exercise 20a. Structural Analysis of the Space Truss�
Appendix:
Exercise 20a
Structural Analysis of the Space Truss
20a-1 Introduction
In this exercise, we will perform a static structural analysis using the line model created in Exercise 20. We'll use the boundary conditions (loads and supports) described in Exercise 20 (20-1[1-4]). The resulting member forces should be consistent with those given by 20-1[5].
20a-2 Start Up
[1] Launch Workbench and open the project "Truss," which was saved in Exercise 20. [2] Double-click <Model> to start up <Mechanical>.
Exercise 20a. Structural Analysis of the Space Truss �
241
20a-3 Set Up <Connections>
[3] If the unit system is not like this, select <Units/ Metric (m, kg, N, s,V, A).
[1] Highlight <Connection>. [2] Select <Body-Body/ Spherical>. A <Spherical> joint allows the connecting members to independently rotate in all directions.
242�
Exercise 20a. Structural Analysis of the Space Truss�
[3] Click <Vertex>. [4] Click this node. [5] Four "selection panes" show up; each represents a vertex of a connecting member. The currently selected vertex is highlighted (redcolored) and arranged at the leftmost position. Let's leave the leftmost vertex selected.
[6] Click to bring up <Apply/Cancel> and click <Apply>.
[7] Select <Deformable>.
[10] Click to bring up <Apply/Cancel> and click <Apply>.
[11] Select <Deformable>.
[8] Click this node again.
[9] Select all the panes except the leftmost one.
Exercise 20a. Structural Analysis of the Space Truss �
243
Now, we've set up a spherical joint at node 1. We'll repeat the above steps to set up the other spherical joints at nodes 2, 3, 4, and 5. When you click a node, make sure all selection panes representing involved vertices show up; if not, click again until all panes show up. Remember to leave the leftmost pane as <Reference> body and the other panes as <Mobile> bodies.
[12] Repeat steps [2-11] four more times to set up spherical joints at nodes 2, 3, 4, and 5.
20a-4 Set Up Supports
[1] Highlight <Static Structural> and select <Supports/ Displacement>.
[2] Select <Vertex>.
[3] Select this node. [5] Click <Apply>.
[6] Type 0 for <Z Component>.
[4] And controlselect this node.
244�
Exercise 20a. Structural Analysis of the Space Truss�
[7] Select <Supports/ Displacement> again.
[8] Select this node.
[9] Click <Apply> and type 0 for <Y Component>.
[11] Select this node.
[12] Click <Apply> and type 0 for all three components. [10] Select <Supports/ Displacement> again.
Exercise 20a. Structural Analysis of the Space Truss �
245
20a-5 Set Up Forces
[1] Select <Loads/Force>.
[2] Select this node.
[3] Click <Apply> and type the component as shown.
20a-6 Set Up Result Objects
[1] Highlight <Solution> and select <Deformation/Total>.
[2] Select <Beam Results/Axial Force>.
246�
Exercise 20a. Structural Analysis of the Space Truss�
20a-7 Solve the Model and View the Results
[1] Click <Solve>.
[7] Click <Probe>. [3] Select <Auto Scale>.
[6] Highlight <Axial Force>.
[2] Highlight <Total Deformation>.
[4] Click <Play> to animate the deformation.
[5] Click <Stop> to stop the animation.
[1] Click each member to display the axial force of each member. These force values are consistent with the values in 20-1[5].
Wrap Up
Close <Mechanical>, save the project as "Truss-a," and exit the Workbench.
You might also like
- Ansys Modelling and Meshing GuideDocument165 pagesAnsys Modelling and Meshing GuideUmesh Vishwakarma33% (3)
- ANSYS Mechanical APDL for Finite Element AnalysisFrom EverandANSYS Mechanical APDL for Finite Element AnalysisRating: 4.5 out of 5 stars4.5/5 (8)
- Engineering Analysis with ANSYS SoftwareFrom EverandEngineering Analysis with ANSYS SoftwareRating: 3.5 out of 5 stars3.5/5 (5)
- Ansys Mechanical TrainingDocument54 pagesAnsys Mechanical TrainingAbhijeet Gandage100% (3)
- SOLIDWORKS Simulation 2016: A Tutorial ApproachFrom EverandSOLIDWORKS Simulation 2016: A Tutorial ApproachRating: 5 out of 5 stars5/5 (1)
- Ansys Workbench Basics ManualDocument75 pagesAnsys Workbench Basics ManualOmar Alzuabi95% (19)
- Beginner Ansys TutorialDocument114 pagesBeginner Ansys TutorialNGUYEN92% (12)
- ANSYS Workbench TutorialDocument25 pagesANSYS Workbench TutorialRitesh Sharma60% (5)
- Vibration and Nonlinear Dynamics of Plates and Shells - Applications of Flat Triangular Finite ElementsFrom EverandVibration and Nonlinear Dynamics of Plates and Shells - Applications of Flat Triangular Finite ElementsNo ratings yet
- Ansys Non LinearDocument18 pagesAnsys Non Linearnz5784270% (1)
- ANSYS Mechanical TutorialsDocument174 pagesANSYS Mechanical TutorialsZhiqiang Gu100% (8)
- ANSYS TutorialDocument20 pagesANSYS Tutorialaekathir75% (4)
- Ansys Training ManualDocument223 pagesAnsys Training Manualbashaheartly83% (12)
- ANSYS Meshing Users Guide PDFDocument534 pagesANSYS Meshing Users Guide PDFdeva100% (3)
- Linear Structural Analysis: Workshop 4.1Document24 pagesLinear Structural Analysis: Workshop 4.1TA Dinh XuanNo ratings yet
- Ansys Solved TutorialsDocument162 pagesAnsys Solved TutorialsUmesh Vishwakarma86% (7)
- Using ANSYS For Finite Element Analysis, Volume I A Tutorial For Engineers by Wael A. Altabey, Mohammad Noori, Libin Wang PDFDocument210 pagesUsing ANSYS For Finite Element Analysis, Volume I A Tutorial For Engineers by Wael A. Altabey, Mohammad Noori, Libin Wang PDFNuno Moreira100% (1)
- ANSYS Mechanical Tutorials 2019 R2Document148 pagesANSYS Mechanical Tutorials 2019 R2Muzamil BalochNo ratings yet
- SW Simulation PDFDocument6 pagesSW Simulation PDFamokhta50% (2)
- ANSYS WorkbenchDocument281 pagesANSYS Workbenchsriram100% (4)
- Ansys Contact TutorialDocument40 pagesAnsys Contact Tutorialviluk100% (2)
- Ansys Workbench Shah Ruck TutorialsDocument25 pagesAnsys Workbench Shah Ruck TutorialsNagamani Arumugam0% (1)
- AnsysDocument26 pagesAnsysrustamriyadiNo ratings yet
- ANSYS Rigid Body Dynamics and ANSYS SimplorerDocument39 pagesANSYS Rigid Body Dynamics and ANSYS SimplorerJorge InglessisNo ratings yet
- FEMAP TrainingDocument177 pagesFEMAP Trainingjrkling100% (2)
- ANSYS Workbench Static Mixer Mesh TutorialDocument47 pagesANSYS Workbench Static Mixer Mesh TutorialAngel BriceñoNo ratings yet
- ANSYS Meshing 12.0Document98 pagesANSYS Meshing 12.0Qiang Liu100% (2)
- Linear Static Structural Analysis BasicsDocument62 pagesLinear Static Structural Analysis BasicsAditya DaveNo ratings yet
- ANSYS Mechanical APDL Basic Analysis GuideDocument364 pagesANSYS Mechanical APDL Basic Analysis GuideRodolfoNo ratings yet
- ANSYS TutorialsDocument20 pagesANSYS TutorialsEmmanuel Ikhaiduwor60% (5)
- Nafems Dynamic Fea WebinarDocument99 pagesNafems Dynamic Fea WebinarRama Baruva100% (1)
- ANSYS Mechanical Users GuideDocument2,548 pagesANSYS Mechanical Users GuideArthur Prates100% (1)
- ANSYS Short TutorialDocument20 pagesANSYS Short TutorialNono_geotec100% (1)
- Solidworks Simulation StandardDocument110 pagesSolidworks Simulation Standardsherwin perezNo ratings yet
- ANSYS For Structural EngineersDocument329 pagesANSYS For Structural EngineersCarlos AugustoNo ratings yet
- Femap TutorialsDocument16 pagesFemap Tutorialsgreat2008No ratings yet
- AnsysDocument151 pagesAnsyspraveen06apr67% (3)
- ANSYS Mechanical APDL Introductory TutorialsDocument106 pagesANSYS Mechanical APDL Introductory TutorialsLeonardo Knupp100% (1)
- ANSYS Meshing Application IntroductionDocument11 pagesANSYS Meshing Application IntroductionMudassir FarooqNo ratings yet
- Learning FemapDocument1 pageLearning Femapjoereis0% (3)
- ADM14Document247 pagesADM14Anonymous T8aah3Jf100% (1)
- Dokumen - Tips Ansys Workbench OptimizationDocument247 pagesDokumen - Tips Ansys Workbench OptimizationMUHAMMAD NAVEEDNo ratings yet
- Autodesk Inventor 2019 For Beginners - Part 1 (Part Modeling)From EverandAutodesk Inventor 2019 For Beginners - Part 1 (Part Modeling)No ratings yet
- Corner L-Bracket From ANSYSDocument29 pagesCorner L-Bracket From ANSYSValeriu PseneacNo ratings yet
- Abaqus For Engineer SampleDocument63 pagesAbaqus For Engineer Sample17pgme001No ratings yet
- Beginning AutoCAD® 2018: Exercise WorkbookFrom EverandBeginning AutoCAD® 2018: Exercise WorkbookRating: 1 out of 5 stars1/5 (1)
- NX8 Sketching HelpDocument242 pagesNX8 Sketching HelpBoy Doland75% (4)
- With ANSYS Workbench 2021: Finite Element SimulationsDocument55 pagesWith ANSYS Workbench 2021: Finite Element SimulationsTirth ParmarNo ratings yet
- Lesson3 OspDocument36 pagesLesson3 OspMIGUEL ANGEL GARCIA BARAJASNo ratings yet
- Tutorial 4 - A Simple AssemblyDocument12 pagesTutorial 4 - A Simple AssemblyKish NvsNo ratings yet
- 5 5 A B CadmodelfeaturesDocument12 pages5 5 A B Cadmodelfeaturesapi-312626334No ratings yet
- Damping Calculations for Race Vehicle SuspensionDocument99 pagesDamping Calculations for Race Vehicle SuspensionManu PantNo ratings yet
- Design and Fabrication of Automated Manual Gear Transmission in Motor BikesDocument57 pagesDesign and Fabrication of Automated Manual Gear Transmission in Motor Bikesanmol6237No ratings yet
- Sri Ganapathi Industries Kushaiguda Title: Scale Size DRWG No: Sheet NoDocument1 pageSri Ganapathi Industries Kushaiguda Title: Scale Size DRWG No: Sheet Noanmol6237No ratings yet
- Nissan Walkin Chennai 1Document2 pagesNissan Walkin Chennai 1anmol6237No ratings yet
- HW Starter Manual March HresolutionDocument23 pagesHW Starter Manual March HresolutionCharan KumarNo ratings yet
- Nissan Walkin ChennaiDocument2 pagesNissan Walkin Chennaianmol6237No ratings yet
- ME 443/643: Introduction to HyperMeshDocument37 pagesME 443/643: Introduction to HyperMeshanmol6237No ratings yet
- Industrial EnclosuresDocument56 pagesIndustrial Enclosuresanmol6237No ratings yet
- List of over 150 Solidworks clientsDocument4 pagesList of over 150 Solidworks clientsanmol6237No ratings yet
- RGB Color TableDocument5 pagesRGB Color Tableanmol6237No ratings yet
- Nissan Walkin ChennaiDocument2 pagesNissan Walkin Chennaianmol6237No ratings yet
- Sri Ganapathi Industries Kushaiguda Title: Scale Size DRWG No: Sheet NoDocument2 pagesSri Ganapathi Industries Kushaiguda Title: Scale Size DRWG No: Sheet Noanmol6237No ratings yet
- Creo2 Adv PrimerDocument174 pagesCreo2 Adv PrimerAmit JhaNo ratings yet
- Nissan Walkin ChennaiDocument2 pagesNissan Walkin Chennaianmol6237No ratings yet
- M Tech Project List 2015 NewDocument5 pagesM Tech Project List 2015 Newanmol6237No ratings yet
- Tool Design TerminologyDocument5 pagesTool Design Terminologyanmol6237No ratings yet
- Parametric Modeling With Creo ParametricDocument41 pagesParametric Modeling With Creo Parametricfrancesca050168No ratings yet
- Press Tool Cutting ForceDocument1 pagePress Tool Cutting Forceanmol6237No ratings yet
- GD AdvantagesDocument1 pageGD Advantagesanmol6237No ratings yet
- GDDocument2 pagesGDanmol6237No ratings yet
- Term - 1 - Class - X Communicative English - 2010Document27 pagesTerm - 1 - Class - X Communicative English - 2010Nitin GargNo ratings yet
- Train Schedule: From Bhopal To Indore JN BG (INBD) BPL - INBD PassengerDocument1 pageTrain Schedule: From Bhopal To Indore JN BG (INBD) BPL - INBD Passengeranmol6237No ratings yet
- Ceed Model Question PaperDocument21 pagesCeed Model Question PaperSatvender SinghNo ratings yet
- SHEARINGDocument6 pagesSHEARINGanmol6237No ratings yet
- Gate Syllabus For Mech EnggDocument4 pagesGate Syllabus For Mech Engganmol6237No ratings yet
- More Than 100 Keyboard Shortcuts Must ReadDocument3 pagesMore Than 100 Keyboard Shortcuts Must ReadChenna Keshav100% (1)
- Train Schedule: From Bhopal To Indore JN BG (INBD) BPL - INBD PassengerDocument1 pageTrain Schedule: From Bhopal To Indore JN BG (INBD) BPL - INBD Passengeranmol6237No ratings yet
- E2SEM1MT2TD06102012Document3 pagesE2SEM1MT2TD06102012anmol6237No ratings yet
- Intro To CFD ProblemDocument1 pageIntro To CFD ProblemlinoNo ratings yet
- Ansys Training Book.Document15 pagesAnsys Training Book.Sarath Babu SNo ratings yet
- Guide To Web Application DevelopmentDocument4 pagesGuide To Web Application DevelopmentHaftamu HailuNo ratings yet
- L8 Unit Commitment Lagrange RelaxationDocument30 pagesL8 Unit Commitment Lagrange RelaxationMalik Shahzeb AliNo ratings yet
- Cell DirectoryDocument26 pagesCell DirectoryHussnain Azam Abdali100% (1)
- Local Edge-Preserving Multiscale Decomposition For High Dynamic Range Image Tone MappingDocument12 pagesLocal Edge-Preserving Multiscale Decomposition For High Dynamic Range Image Tone MappinglambanaveenNo ratings yet
- C Programming Questions and AnswersDocument19 pagesC Programming Questions and AnswersBalaji MehtaNo ratings yet
- The Biblatex Package: Programmable Bibliographies and CitationsDocument264 pagesThe Biblatex Package: Programmable Bibliographies and CitationsErlkoenig85No ratings yet
- WBFuncsDocument21 pagesWBFuncsFernando SousaNo ratings yet
- Practice Apx PDocument4 pagesPractice Apx PballechaseNo ratings yet
- Job Description - Manual Tester - SAP HR (012209)Document2 pagesJob Description - Manual Tester - SAP HR (012209)rockypramodNo ratings yet
- Designated Supplier of China Silk Road-Dunhuang Scenic AreaDocument2 pagesDesignated Supplier of China Silk Road-Dunhuang Scenic AreaMargarita vargasNo ratings yet
- C# Multithreaded and Parallel Programming Sample ChapterDocument36 pagesC# Multithreaded and Parallel Programming Sample ChapterPackt PublishingNo ratings yet
- HAP Specification Non Commercial VersionDocument259 pagesHAP Specification Non Commercial VersionCraig100% (1)
- SWIFT Case Study Accord EADS 200808Document3 pagesSWIFT Case Study Accord EADS 200808maheshbendigeri5945No ratings yet
- ANSYS CFX-Solver Manager Users Guide PDFDocument192 pagesANSYS CFX-Solver Manager Users Guide PDFaliNo ratings yet
- EceDocument6 pagesEceAhmad Khanif FikriNo ratings yet
- Hadoop and BigData LAB MANUALDocument59 pagesHadoop and BigData LAB MANUALharshi33% (3)
- Emu 4Document16 pagesEmu 4Adhithya SrinivasanNo ratings yet
- Vxworks Installing 6.5 1.1.2.0Document16 pagesVxworks Installing 6.5 1.1.2.0premathiraviamNo ratings yet
- 4D Construction Sequence Planning - New Process and Data Model PDFDocument6 pages4D Construction Sequence Planning - New Process and Data Model PDFel_residenteNo ratings yet
- Literature Review: Digital Payment System in IndiaDocument8 pagesLiterature Review: Digital Payment System in IndiaAkshay Thampi0% (1)
- M21des323 02Document59 pagesM21des323 02asbsfgNo ratings yet
- In Ac aktu-DGMST-1637310030X4Document1 pageIn Ac aktu-DGMST-1637310030X4Anikate SharmaNo ratings yet
- Dosxyz Show ManualDocument4 pagesDosxyz Show ManualIgnacio Verdugo100% (1)
- Frame Element PDFDocument7 pagesFrame Element PDFUnknow UnknowNo ratings yet
- (Guide) Solution For Device Is Corrupt and Can Not Be Trusted Issue-ZB601KL (ASUS Max Pro M1) - MobileDocument6 pages(Guide) Solution For Device Is Corrupt and Can Not Be Trusted Issue-ZB601KL (ASUS Max Pro M1) - Mobileraghu0078No ratings yet
- St. Martin's Engineering College covers software process maturity models in CMM, CMMI, and PCMMDocument45 pagesSt. Martin's Engineering College covers software process maturity models in CMM, CMMI, and PCMMtejaswini73% (22)
- Optimal Dynamic Path Availability Mesh NetworksDocument63 pagesOptimal Dynamic Path Availability Mesh NetworksAmir AmirthalingamNo ratings yet
- QM-Data 200 Operation Guide A4Document0 pagesQM-Data 200 Operation Guide A4Ana Gabriela OjedaNo ratings yet
- Debugging Imagej Plugins in NetbeansDocument4 pagesDebugging Imagej Plugins in NetbeansAlejandro Aldana RodriguezNo ratings yet
- Sahoo Dpwicqk Nicergaw: Cademic RofileDocument2 pagesSahoo Dpwicqk Nicergaw: Cademic RofileDpwicqk NicergawNo ratings yet