You might also like
- How Why GroundingDocument8 pagesHow Why GroundingReinerio Praxedes Castillo CespedesNo ratings yet
- Tektronix The Fundamentals of Three-Phase Power Measurements App NoteDocument8 pagesTektronix The Fundamentals of Three-Phase Power Measurements App Notesgshekar30No ratings yet
- DS Bu 16 @Document1 pageDS Bu 16 @asalasv65No ratings yet
- Fluke 192B - 196B/C - 199B/C: Getting StartedDocument20 pagesFluke 192B - 196B/C - 199B/C: Getting Startedasalasv65No ratings yet
- Hwa - SPD - Ib - 8222-0012DDocument48 pagesHwa - SPD - Ib - 8222-0012Dasalasv65No ratings yet
- Electroimanes Suspendidos Autolimpieza PDFDocument6 pagesElectroimanes Suspendidos Autolimpieza PDFasalasv65No ratings yet
- Glazier Wheat Pease Bartlett 06Document22 pagesGlazier Wheat Pease Bartlett 06asalasv65No ratings yet
- Tableros ShafelDocument2 pagesTableros Shafelasalasv65No ratings yet
- Fluke ScopeMeter Instrument SecurityDocument2 pagesFluke ScopeMeter Instrument Security15101980No ratings yet
- Synchrophasors: Definitions, Measurement and ApplicationDocument6 pagesSynchrophasors: Definitions, Measurement and ApplicationflaviograndoNo ratings yet
- Fluke 19xC-2x5C: Getting StartedDocument18 pagesFluke 19xC-2x5C: Getting Startedasalasv65No ratings yet
- KN Atex 09-2013 NL GB PDFDocument12 pagesKN Atex 09-2013 NL GB PDFasalasv65No ratings yet
- EZine Volume 04 MarchDocument29 pagesEZine Volume 04 Marchasalasv65No ratings yet
- INT-Terasaki Selection Guide 15-G00ENDocument32 pagesINT-Terasaki Selection Guide 15-G00ENasalasv65No ratings yet
- 3-Lesson Notes Lec 15 DC Motors IDocument7 pages3-Lesson Notes Lec 15 DC Motors Iasalasv65No ratings yet
- UPS Handbook Rev D Low PDFDocument36 pagesUPS Handbook Rev D Low PDFAshwin DuhonarrainNo ratings yet
- IEC - Panel RegulationDocument20 pagesIEC - Panel RegulationAsith SavindaNo ratings yet
- DC TC Tarif 906211399 GB BD PDFDocument3 pagesDC TC Tarif 906211399 GB BD PDFasalasv65No ratings yet
- Safety Professionals Guide To Lockout Tagout EbookDocument33 pagesSafety Professionals Guide To Lockout Tagout EbookSebastian Mejia PuertaNo ratings yet
- Optimize Power Quality and Reduce Costs with Metrel AnalyzersDocument12 pagesOptimize Power Quality and Reduce Costs with Metrel Analyzersasalasv65No ratings yet
- UPS Theoretical ReviewDocument63 pagesUPS Theoretical ReviewAsad MadniNo ratings yet
- DC GB 906211239Document36 pagesDC GB 906211239Husnain AssociatesNo ratings yet
- Ohm's Law With Cobra4 - ... Gineering - ExperimentsDocument1 pageOhm's Law With Cobra4 - ... Gineering - Experimentsasalasv65No ratings yet
- UPS Theoretical ReviewDocument63 pagesUPS Theoretical ReviewAsad MadniNo ratings yet
- BRADY-Arc Flash Labeling Whitepaper-NFPA 70E 2015Document5 pagesBRADY-Arc Flash Labeling Whitepaper-NFPA 70E 2015JOSE LUIS FALCON CHAVEZNo ratings yet
- 3 Application Inductive SensorDocument3 pages3 Application Inductive Sensorasalasv65No ratings yet
- KN Atex 09-2013 NL GBDocument12 pagesKN Atex 09-2013 NL GBasalasv65No ratings yet
- Capacitor in The AC Circ... Gineering - ExperimentsDocument1 pageCapacitor in The AC Circ... Gineering - Experimentsasalasv65No ratings yet
- How Why GroundingDocument8 pagesHow Why GroundingReinerio Praxedes Castillo CespedesNo ratings yet
- What Is Arc Flash - Mike HoltDocument10 pagesWhat Is Arc Flash - Mike Holtasalasv65No ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5782)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Actuation Product Catalogue - OneSteelDocument65 pagesActuation Product Catalogue - OneSteelJOHN100% (1)
- Hydraulic Fracturing ReferencesDocument1 pageHydraulic Fracturing ReferencesMaulin GogriNo ratings yet
- Servomotores PDFDocument118 pagesServomotores PDFFlorentino PonceNo ratings yet
- Role of The Quantity SurveyorDocument13 pagesRole of The Quantity SurveyorLokuliyanaNNo ratings yet
- Iptc-17413-Ms EspDocument22 pagesIptc-17413-Ms Espamramazon88No ratings yet
- Writing A Parser From Wire To WindowDocument43 pagesWriting A Parser From Wire To WindowJonah H. HarrisNo ratings yet
- ISO 9001 Clause 7.5.2 Validation of Special ProcessesDocument3 pagesISO 9001 Clause 7.5.2 Validation of Special Processeseconchan100% (1)
- Iec TS 61936-2-2015Document42 pagesIec TS 61936-2-2015Johan MayaNo ratings yet
- Factors To Consider in Foundation Design Chapter # 02Document18 pagesFactors To Consider in Foundation Design Chapter # 02Ali ShaheryarNo ratings yet
- Volvo Instruction Manual For Ac Generators Qas 125 150Document8 pagesVolvo Instruction Manual For Ac Generators Qas 125 150walter100% (17)
- CS3110 Final Cheat SheetDocument7 pagesCS3110 Final Cheat SheetEdward LeeNo ratings yet
- Ecn 30210 PDocument22 pagesEcn 30210 PMajid MollaieNo ratings yet
- Bailey Bridge: Comprehensive Training For DPWH Field Engineers April 22, 2013Document63 pagesBailey Bridge: Comprehensive Training For DPWH Field Engineers April 22, 2013Edhz AmbalesNo ratings yet
- Hall Buttons Car Operating Panel: Standard Hall Call Button & Position IndicatorDocument1 pageHall Buttons Car Operating Panel: Standard Hall Call Button & Position Indicatorsameer hassanNo ratings yet
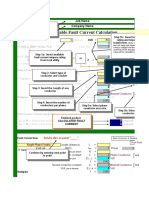
- Fault Current CalculatorDocument6 pagesFault Current CalculatorVũDuyTânNo ratings yet
- Digital Fiberoptic Sensor: FS-N SeriesDocument28 pagesDigital Fiberoptic Sensor: FS-N SeriesOlger Garcia FalconesNo ratings yet
- Moodle User Manual for UJ StudentsDocument14 pagesMoodle User Manual for UJ StudentsalexNo ratings yet
- Redbox: Model Rbl4000 LithiumDocument1 pageRedbox: Model Rbl4000 LithiumAbdullah SindhuNo ratings yet
- Fire Alarm ChecklistDocument2 pagesFire Alarm ChecklistiifudinNo ratings yet
- 1250 UkDocument2 pages1250 UkSe SergiuNo ratings yet
- Insulating Firebrick (IFB)Document2 pagesInsulating Firebrick (IFB)rickidenesNo ratings yet
- Catalog Skid Mounted System PDFDocument56 pagesCatalog Skid Mounted System PDFUmar AslamNo ratings yet
- Java Developer ResumeDocument3 pagesJava Developer ResumeRavi ManiyarNo ratings yet
- JAR 66 Module 1 Propeller Exam PracticeDocument43 pagesJAR 66 Module 1 Propeller Exam Practicerobija1No ratings yet
- Dp1500i t4 Specification Sheet EnglishDocument3 pagesDp1500i t4 Specification Sheet EnglishMahamadou IssoufouNo ratings yet
- WG FM Report Summarizes Key Discussions and DecisionsDocument41 pagesWG FM Report Summarizes Key Discussions and DecisionsJeandelaSagesseNo ratings yet
- Section MN: FL WL SK CL FL WL SK CL FL WL SK CLDocument1 pageSection MN: FL WL SK CL FL WL SK CL FL WL SK CLS Amit RaoNo ratings yet
- Ebook Oracle E-Business Suite R12 Step by Step InstallationDocument57 pagesEbook Oracle E-Business Suite R12 Step by Step InstallationOraERPNo ratings yet
- Economics of Power GenerationDocument22 pagesEconomics of Power Generationbhaskar123321No ratings yet