You might also like
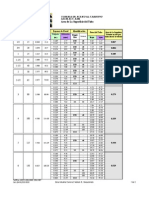
- Tabla de especificaciones de tubería de acero al carbono ASTM A53/A106 con diámetros de 1/2 a 6Document3 pagesTabla de especificaciones de tubería de acero al carbono ASTM A53/A106 con diámetros de 1/2 a 6reblas100% (6)
- MetradoDocument3 pagesMetradoGuido Alonso Vasquez QuirozNo ratings yet
- Tabla de FuerzasDocument1 pageTabla de FuerzasGuido Alonso Vasquez QuirozNo ratings yet
- Excel para Finanzas Empresariales: Curso de EspecializaciónDocument4 pagesExcel para Finanzas Empresariales: Curso de EspecializaciónGuido Alonso Vasquez QuirozNo ratings yet
- Catalogo Multi-V Water - 2017 PDFDocument24 pagesCatalogo Multi-V Water - 2017 PDFGuido Alonso Vasquez Quiroz0% (1)
- Sesión 1-TPMDocument29 pagesSesión 1-TPMGuido Alonso Vasquez QuirozNo ratings yet
- Gestiondeactivosguiadeaplicacion ISO550001Document52 pagesGestiondeactivosguiadeaplicacion ISO550001Miguel Ángel Díaz SepúlvedaNo ratings yet
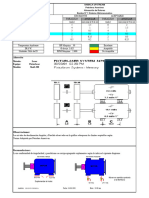
- Alineacion Pump-Hidro-1Document1 pageAlineacion Pump-Hidro-1Guido Alonso Vasquez QuirozNo ratings yet
- Inspeccion Mediante Ultrasonido - Laminacion 27-04-11Document14 pagesInspeccion Mediante Ultrasonido - Laminacion 27-04-11Guido Alonso Vasquez QuirozNo ratings yet
- Formato Caso Bebida Natural SAC - Rev01Document3 pagesFormato Caso Bebida Natural SAC - Rev01Guido Alonso Vasquez QuirozNo ratings yet
- Catalogo Multi-V Water - 2017 PDFDocument24 pagesCatalogo Multi-V Water - 2017 PDFGuido Alonso Vasquez Quiroz0% (1)
- 4cwilhelmy PDFDocument67 pages4cwilhelmy PDFGuido Alonso Vasquez QuirozNo ratings yet
- Holzmann eDocument125 pagesHolzmann eraer1971No ratings yet
- Calefactor Solar para PiscinaDocument127 pagesCalefactor Solar para Piscinaventas.juguetes9No ratings yet
- Organigrama Basico de Una Entidad BancariaDocument1 pageOrganigrama Basico de Una Entidad BancariaGuido Alonso Vasquez QuirozNo ratings yet
- Colectores Solares PDFDocument142 pagesColectores Solares PDFAngel de JesusNo ratings yet
- Formatos Inspecciones VehiculoDocument1 pageFormatos Inspecciones VehiculoGuido Alonso Vasquez QuirozNo ratings yet
- Engineering ManualDocument36 pagesEngineering ManualRafael Sánchez HernándezNo ratings yet
- Cuadro Tabulacion Octubre - 16Document9 pagesCuadro Tabulacion Octubre - 16Guido Alonso Vasquez QuirozNo ratings yet
- Guia Sap 2000Document143 pagesGuia Sap 2000Irvin Tuero CruzNo ratings yet
- Proyecto de Sustitución Energética Parcial Por Energía Solar para El Aeropuerto de Santiago de Chile Y para La Mina "El Tesoro"Document118 pagesProyecto de Sustitución Energética Parcial Por Energía Solar para El Aeropuerto de Santiago de Chile Y para La Mina "El Tesoro"Guido Alonso Vasquez QuirozNo ratings yet
- Ce Sap2000 2016Document118 pagesCe Sap2000 2016JavierCornejoCarpioNo ratings yet
- Imco Cap17070 1700337 DCC 003Document148 pagesImco Cap17070 1700337 DCC 003Guido Alonso Vasquez QuirozNo ratings yet
- Martinez Espinoza 2011Document127 pagesMartinez Espinoza 2011Paulina Diaz DiazNo ratings yet
- Holzmann eDocument125 pagesHolzmann eraer1971No ratings yet
- Tomas Trifásicas en Nave AlmacénDocument2 pagesTomas Trifásicas en Nave AlmacénGuido Alonso Vasquez QuirozNo ratings yet
- Factibilidad de una planta procesadora de tara en CajamarcaDocument128 pagesFactibilidad de una planta procesadora de tara en CajamarcaGuido Alonso Vasquez QuirozNo ratings yet
- Imco Cap17070 1700337 DCC 003Document148 pagesImco Cap17070 1700337 DCC 003Guido Alonso Vasquez QuirozNo ratings yet
- Actividad de Puntos Evaluables - Escenario 2 - SEGUNDO BLOQUE-TEORICO-PRACTICO - VIRTUAL - COSTOS Y PRESUPUESTOS - (GRUPO B13)Document7 pagesActividad de Puntos Evaluables - Escenario 2 - SEGUNDO BLOQUE-TEORICO-PRACTICO - VIRTUAL - COSTOS Y PRESUPUESTOS - (GRUPO B13)Steven MarinNo ratings yet
- Porta FolioDocument24 pagesPorta Foliotoquimax100% (1)
- Qué Es El Campo Visual y Qué Importancia TieneDocument4 pagesQué Es El Campo Visual y Qué Importancia TieneFelipe Matteo Garcia ZambitoNo ratings yet
- Plan de Desarrollo-CEDAP-Al 2018 (Por Aprobarse)Document61 pagesPlan de Desarrollo-CEDAP-Al 2018 (Por Aprobarse)Javier Perez SanchezNo ratings yet
- Trabajo Final Adscripción Lenguas (2017)Document58 pagesTrabajo Final Adscripción Lenguas (2017)Agustín LiarteNo ratings yet
- Fuentes Del Derecho RomanoDocument64 pagesFuentes Del Derecho RomanoGene P. BurgosNo ratings yet
- El Bosque de Las LetrasDocument2 pagesEl Bosque de Las LetrasmelissaNo ratings yet
- Entrada en Calor Educacion FisicaDocument2 pagesEntrada en Calor Educacion FisicaLucas ErbenNo ratings yet
- TI 2020 Higa, Perez, Romero, MerinoDocument186 pagesTI 2020 Higa, Perez, Romero, Merinowaltermt007No ratings yet
- Horizonte Temprano y MedioDocument26 pagesHorizonte Temprano y MedioJohann Vasquez0% (1)
- Fonetica Conceptos (Escrito Por Mi)Document10 pagesFonetica Conceptos (Escrito Por Mi)alexroglaNo ratings yet
- Metodologia Del Entrenamiento DeportivoDocument3 pagesMetodologia Del Entrenamiento DeportivoyolimarNo ratings yet
- Decálogo del perfecto cuentistaDocument7 pagesDecálogo del perfecto cuentistaAna Rita VillarNo ratings yet
- Aca 1 Auditoria de Sistemas - Control InternoDocument26 pagesAca 1 Auditoria de Sistemas - Control InternoGabrielNo ratings yet
- Formato Comparacion NIC 36-PYMESDocument18 pagesFormato Comparacion NIC 36-PYMESJorgeEliecerQuirogaSánchezNo ratings yet
- Hist San Rafael del Yuma fund 1889Document1 pageHist San Rafael del Yuma fund 1889Michael Perez ReyesNo ratings yet
- Universidad Del Azuay: Facultad de Diseño, Arquitectura Y ArteDocument112 pagesUniversidad Del Azuay: Facultad de Diseño, Arquitectura Y ArteAlejandro O. Cárdenas GarcíaNo ratings yet
- Teoria Cuadros ComparativosDocument4 pagesTeoria Cuadros ComparativosWilemily PalacubidesNo ratings yet
- Abstencion de Formalizacion de Denuncia PenalDocument3 pagesAbstencion de Formalizacion de Denuncia PenalDaniel Rafael DíazNo ratings yet
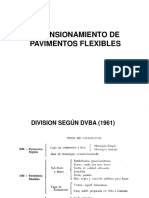
- Apunte 11. Dimensionamiento de Pavimentos FlexiblesDocument264 pagesApunte 11. Dimensionamiento de Pavimentos FlexiblesJhonny Gabriel TorrezNo ratings yet
- Huevos Fértiles SPF - Una Eficaz Herramienta para La Investigación de Enfermedades de Las Aves PDFDocument2 pagesHuevos Fértiles SPF - Una Eficaz Herramienta para La Investigación de Enfermedades de Las Aves PDFangelNo ratings yet
- La Inteligencia CreadoraDocument2 pagesLa Inteligencia CreadoraNoaNo ratings yet
- Introducción A La Geografía UniversalDocument20 pagesIntroducción A La Geografía UniversalCarlos Armando Osorio RoqueNo ratings yet
- HojaVida IngenieroMecánicoDocument14 pagesHojaVida IngenieroMecánicoMauricio PerezNo ratings yet
- Aditivos Conservantes AromatizantesDocument27 pagesAditivos Conservantes AromatizantesARKNGLANTITAUNo ratings yet
- Guia de Conformacion Del Comite de Mejora Continua de La Calidad y Seguridad Del PacienteDocument18 pagesGuia de Conformacion Del Comite de Mejora Continua de La Calidad y Seguridad Del PacienteHospital Municipal Vicente nobleNo ratings yet
- 2 Anexo B Cronograma Actividades OficialessssDocument2 pages2 Anexo B Cronograma Actividades OficialessssS ErsNo ratings yet
- Codecs PDFDocument17 pagesCodecs PDFEmil KamadaNo ratings yet
- Martha Alles Capitulo 9Document3 pagesMartha Alles Capitulo 9Melina Guidi0% (1)
- Trabajo Final de Fundamentos de InvestigacionDocument6 pagesTrabajo Final de Fundamentos de InvestigacionlxjpNo ratings yet