You might also like
- Research ProposalDocument5 pagesResearch ProposalHoang HuynhNo ratings yet
- IELTS Speaking Q&ADocument17 pagesIELTS Speaking Q&ABDApp Star100% (1)
- NABARD road inspection report formatDocument24 pagesNABARD road inspection report formatSrinivas PNo ratings yet
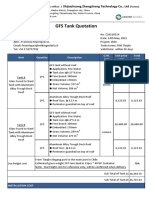
- GFS Tank Quotation C20210514Document4 pagesGFS Tank Quotation C20210514Francisco ManriquezNo ratings yet
- Hierarchical Formation Control Based On A Vector Field Method For Wheeled Mobile RobotsDocument11 pagesHierarchical Formation Control Based On A Vector Field Method For Wheeled Mobile RobotsIvan AvramovNo ratings yet
- Robot FormationsDocument10 pagesRobot FormationsSwathi PrasadNo ratings yet
- Tracking Locomotion Using Reinforcement LearningDocument9 pagesTracking Locomotion Using Reinforcement LearningIJRASETPublicationsNo ratings yet
- Nonlinear Formation Control of Unicycle-Type Mobile Robots: K.D. Do J. PanDocument14 pagesNonlinear Formation Control of Unicycle-Type Mobile Robots: K.D. Do J. PanBụi ĐườngNo ratings yet
- Grosso E Articolo 1995 ActiveDocument12 pagesGrosso E Articolo 1995 ActiveMaria PaladeNo ratings yet
- Planning For Manipulation With Adaptive Motion PrimitivesDocument8 pagesPlanning For Manipulation With Adaptive Motion PrimitivesTales MarquesNo ratings yet
- A - Simplified - Flexible - Multibody - Dynamics - For - A - Main Landing GearDocument11 pagesA - Simplified - Flexible - Multibody - Dynamics - For - A - Main Landing GearSoma VargaNo ratings yet
- Ramirez-Riberos Et AlDocument15 pagesRamirez-Riberos Et AlcelticpenguinNo ratings yet
- Behavior Dynamics Based Motion Planning of Mobile Robots in Uncertain Dynamic EnvironmentsDocument25 pagesBehavior Dynamics Based Motion Planning of Mobile Robots in Uncertain Dynamic EnvironmentsAbd SalahNo ratings yet
- Edge-Weighted Consensus-Based Formation Control WiDocument19 pagesEdge-Weighted Consensus-Based Formation Control WiAlfonso HernándezNo ratings yet
- Minorpaper PDFDocument19 pagesMinorpaper PDFKartikNo ratings yet
- Deep Tracking ControlDocument18 pagesDeep Tracking ControlRyanNo ratings yet
- Dynamic resource reservation prevents collisions and deadlocks for multiple AGVsDocument12 pagesDynamic resource reservation prevents collisions and deadlocks for multiple AGVsIchiware StoreNo ratings yet
- Sivapalan, Sabesan Chen, Daniel Denman, Simon Sridharan, Sridha Fookes, Clinton BDocument7 pagesSivapalan, Sabesan Chen, Daniel Denman, Simon Sridharan, Sridha Fookes, Clinton BManoj PopNo ratings yet
- 2023-Fuzzy Adaptive Fault Tolerant Time-Varying Formation Control for Nonholonomic MuDocument12 pages2023-Fuzzy Adaptive Fault Tolerant Time-Varying Formation Control for Nonholonomic MuThế TrầnNo ratings yet
- 2-Distributed Formation and Reconfiguration Control of VTOL UAVsDocument8 pages2-Distributed Formation and Reconfiguration Control of VTOL UAVsWaqas HussainNo ratings yet
- Collision Avoidence For Vehicle Following PDFDocument12 pagesCollision Avoidence For Vehicle Following PDFsuviryNo ratings yet
- Planning For Manipulation With Adaptive Motion PrimitivesDocument8 pagesPlanning For Manipulation With Adaptive Motion Primitivesbencohen2No ratings yet
- Safe Multi Agent Reforcement Learning For Autonomous DrivingDocument13 pagesSafe Multi Agent Reforcement Learning For Autonomous DrivingChangsong yuNo ratings yet
- Dynamic Humanoid Locomotion: A Scalable Formulation For HZD Gait OptimizationDocument18 pagesDynamic Humanoid Locomotion: A Scalable Formulation For HZD Gait OptimizationFajar MaulanaNo ratings yet
- Multi-view 3D shape reconstruction using level setsDocument11 pagesMulti-view 3D shape reconstruction using level setsNormanNo ratings yet
- Werling Optimal Trajectory Generationfor Dynamic Street Scenariosina Frenet FrameDocument8 pagesWerling Optimal Trajectory Generationfor Dynamic Street Scenariosina Frenet FramehugoNo ratings yet
- An Optimized Hybrid Transformer-Based Technique For Real-Time Pedestrian Intention Estimation in Autonomous VehiclesDocument6 pagesAn Optimized Hybrid Transformer-Based Technique For Real-Time Pedestrian Intention Estimation in Autonomous Vehicleskarimelkasas99No ratings yet
- 2023 MPC Quadruped RLDocument13 pages2023 MPC Quadruped RLpouya mansouriNo ratings yet
- Computer Vision and Image Understanding: Nazim Ashraf, Yuping Shen, Xiaochun Cao, Hassan ForooshDocument16 pagesComputer Vision and Image Understanding: Nazim Ashraf, Yuping Shen, Xiaochun Cao, Hassan ForooshUzair TariqNo ratings yet
- Implementation of Leader-Follower Formation Control of A Team of Nonholonomic Mobile RobotsDocument15 pagesImplementation of Leader-Follower Formation Control of A Team of Nonholonomic Mobile RobotsIshak EnginerNo ratings yet
- Optimization-Based Collision Avoidance ReformulationDocument27 pagesOptimization-Based Collision Avoidance ReformulationAlejandro Sans JiménezNo ratings yet
- Liu 2019Document8 pagesLiu 2019sallieammar63No ratings yet
- Heterogeneous Crowd Simulation Using Parametric Reinforcement LearningDocument18 pagesHeterogeneous Crowd Simulation Using Parametric Reinforcement LearningDrishti SenNo ratings yet
- A Location-Velocity-Temp SYLLDocument14 pagesA Location-Velocity-Temp SYLLNguyễn Thái HọcNo ratings yet
- Robot Learning System Based On Adaptive Neural Control and Dynamic Movement PrimitivesDocument11 pagesRobot Learning System Based On Adaptive Neural Control and Dynamic Movement PrimitivesathenavladivostokNo ratings yet
- Heuristic Predictive LOS Guidance Law for Intercepting Maneuvering TargetsDocument7 pagesHeuristic Predictive LOS Guidance Law for Intercepting Maneuvering Targetsاحمد عليNo ratings yet
- 19.Sebti-Hassanpour2017 Article BodyOrientationEstimationWithTDocument17 pages19.Sebti-Hassanpour2017 Article BodyOrientationEstimationWithTbukhtawar zamirNo ratings yet
- Research Collection: Continuous-Time Trajectory Optimization For Online UAV ReplanningDocument9 pagesResearch Collection: Continuous-Time Trajectory Optimization For Online UAV ReplanningЄвген ВознюкNo ratings yet
- The Crowd Simulation For Interactive Virtual EnvironmentsDocument4 pagesThe Crowd Simulation For Interactive Virtual EnvironmentsswidyartoNo ratings yet
- Markerless Motion Capture Using Image Features and Physical ConstraintsDocument8 pagesMarkerless Motion Capture Using Image Features and Physical ConstraintsHany ElGezawyNo ratings yet
- CH 5Document17 pagesCH 5clairblues11No ratings yet
- Research Statement - Somil BansalDocument6 pagesResearch Statement - Somil BansalAbhishek ChandraNo ratings yet
- Modeling and Evolving Human Behaviors and Emotions in Road Traffic NetworksDocument11 pagesModeling and Evolving Human Behaviors and Emotions in Road Traffic NetworksMarhadi LeonchiNo ratings yet
- Driver Dojo: A Benchmark For Generalizable Reinforcement Learning For Autonomous DrivingDocument19 pagesDriver Dojo: A Benchmark For Generalizable Reinforcement Learning For Autonomous DrivingshoaibazaNo ratings yet
- Image-Based Autonomous Pursuit of A Non-Cooperative Multirotor Aerial Robot Using Learning TechniquesDocument8 pagesImage-Based Autonomous Pursuit of A Non-Cooperative Multirotor Aerial Robot Using Learning TechniquesAlejandro RodríguezNo ratings yet
- Comparison of Different Methods to Control Constraints Violation in Forward Multibody DynamicsDocument10 pagesComparison of Different Methods to Control Constraints Violation in Forward Multibody DynamicsGerry RyanNo ratings yet
- Socially Aware Motion Planning With Deep Reinforcement LearningDocument8 pagesSocially Aware Motion Planning With Deep Reinforcement LearningSushant SNo ratings yet
- Recognizing Actions from Multiple Cameras Using a New Pose-Based RepresentationDocument12 pagesRecognizing Actions from Multiple Cameras Using a New Pose-Based RepresentationhjaraujoNo ratings yet
- Marker-free motion capture from 3D voxel dataDocument10 pagesMarker-free motion capture from 3D voxel dataCyrille LamasséNo ratings yet
- 0504 Learning Robust Driving Policies Without Online ExplorationDocument8 pages0504 Learning Robust Driving Policies Without Online Exploration1795546027No ratings yet
- Cooperative Distributed Robust Trajectory Optimization Using Receding Horizon Milp, TCST.2010.2045501Document9 pagesCooperative Distributed Robust Trajectory Optimization Using Receding Horizon Milp, TCST.2010.2045501Mehmed BrkićNo ratings yet
- Composite Dynamic Movement Primitives Based On Neural Networks For Human-Robot Skill TransferDocument11 pagesComposite Dynamic Movement Primitives Based On Neural Networks For Human-Robot Skill TransferathenavladivostokNo ratings yet
- Search-Based Planning For Manipulation With Motion PrimitivesDocument7 pagesSearch-Based Planning For Manipulation With Motion PrimitivesTales MarquesNo ratings yet
- Paper Colregs CameraDocument7 pagesPaper Colregs CameraJuan Santiago Latigo ColliNo ratings yet
- Adaptive Multi-Robot Coordination: A Game-Theoretic PerspectiveDocument8 pagesAdaptive Multi-Robot Coordination: A Game-Theoretic PerspectivezakizadehNo ratings yet
- remotesensing-14-01613 (3)Document20 pagesremotesensing-14-01613 (3)Christine AllenNo ratings yet
- SVO: Semi-Direct Visual Odometry For Monocular and Multi-Camera SystemsDocument18 pagesSVO: Semi-Direct Visual Odometry For Monocular and Multi-Camera SystemsMike AlonsoNo ratings yet
- A Method For Tracking Road ObjectsDocument15 pagesA Method For Tracking Road ObjectsIJMAJournalNo ratings yet
- Optimal Control of Vehicular Formations With Nearest Neighbor InteractionsDocument16 pagesOptimal Control of Vehicular Formations With Nearest Neighbor InteractionsAlex VladNo ratings yet
- A Unified Framework Integrating Decision Making and Trajectory Planning Based On Spatio-Temporal Voxels For Highway Autonomous DrivingDocument15 pagesA Unified Framework Integrating Decision Making and Trajectory Planning Based On Spatio-Temporal Voxels For Highway Autonomous Driving1450468400No ratings yet
- Bicego2020 Article NonlinearModelPredictiveContro PDFDocument35 pagesBicego2020 Article NonlinearModelPredictiveContro PDFEddylson Aguilar CasquinoNo ratings yet
- Micromachines 11 00386 v2Document22 pagesMicromachines 11 00386 v2Aurélien KinetNo ratings yet
- Tracking with Particle Filter for High-dimensional Observation and State SpacesFrom EverandTracking with Particle Filter for High-dimensional Observation and State SpacesNo ratings yet
- Use Visual Control So No Problems Are Hidden.: TPS Principle - 7Document8 pagesUse Visual Control So No Problems Are Hidden.: TPS Principle - 7Oscar PinillosNo ratings yet
- White Box Testing Techniques: Ratna SanyalDocument23 pagesWhite Box Testing Techniques: Ratna SanyalYogesh MundhraNo ratings yet
- Role of PAODocument29 pagesRole of PAOAjay DhokeNo ratings yet
- The Service Marketing Plan On " Expert Personalized Chef": Presented byDocument27 pagesThe Service Marketing Plan On " Expert Personalized Chef": Presented byA.S. ShuvoNo ratings yet
- ERIKS Dynamic SealsDocument28 pagesERIKS Dynamic Sealsdd82ddNo ratings yet
- Corporate Governance, Corporate Profitability Toward Corporate Social Responsibility Disclosure and Corporate Value (Comparative Study in Indonesia, China and India Stock Exchange in 2013-2016) .Document18 pagesCorporate Governance, Corporate Profitability Toward Corporate Social Responsibility Disclosure and Corporate Value (Comparative Study in Indonesia, China and India Stock Exchange in 2013-2016) .Lia asnamNo ratings yet
- ITP Exam SuggetionDocument252 pagesITP Exam SuggetionNurul AminNo ratings yet
- Human Rights Alert: Corrective Actions in Re: Litigation Involving Financial InstitutionsDocument3 pagesHuman Rights Alert: Corrective Actions in Re: Litigation Involving Financial InstitutionsHuman Rights Alert - NGO (RA)No ratings yet
- Individual Performance Commitment and Review Form (Ipcrf) : Mfos Kras Objectives Timeline Weight Per KRADocument4 pagesIndividual Performance Commitment and Review Form (Ipcrf) : Mfos Kras Objectives Timeline Weight Per KRAChris21JinkyNo ratings yet
- Tutorial 1 Discussion Document - Batch 03Document4 pagesTutorial 1 Discussion Document - Batch 03Anindya CostaNo ratings yet
- CTR Ball JointDocument19 pagesCTR Ball JointTan JaiNo ratings yet
- Mil STD 2154Document44 pagesMil STD 2154Muh SubhanNo ratings yet
- Wheeled Loader L953F Specifications and DimensionsDocument1 pageWheeled Loader L953F Specifications and Dimensionssds khanhNo ratings yet
- France Winckler Final Rev 1Document14 pagesFrance Winckler Final Rev 1Luciano Junior100% (1)
- Inborn Errors of Metabolism in Infancy: A Guide To DiagnosisDocument11 pagesInborn Errors of Metabolism in Infancy: A Guide To DiagnosisEdu Diaperlover São PauloNo ratings yet
- C4 ISRchapterDocument16 pagesC4 ISRchapterSerkan KalaycıNo ratings yet
- Busbar sizing recommendations for Masterpact circuit breakersDocument1 pageBusbar sizing recommendations for Masterpact circuit breakersVikram SinghNo ratings yet
- Easa Management System Assessment ToolDocument40 pagesEasa Management System Assessment ToolAdam Tudor-danielNo ratings yet
- MA1201 Calculus and Basic Linear Algebra II Solution of Problem Set 4Document10 pagesMA1201 Calculus and Basic Linear Algebra II Solution of Problem Set 4Sit LucasNo ratings yet
- 1st SemDocument3 pages1st SemARUPARNA MAITYNo ratings yet
- Why Choose Medicine As A CareerDocument25 pagesWhy Choose Medicine As A CareerVinod KumarNo ratings yet
- Bio310 Summary 1-5Document22 pagesBio310 Summary 1-5Syafiqah ArdillaNo ratings yet
- ArDocument26 pagesArSegunda ManoNo ratings yet
- Seminar Course Report ON Food SafetyDocument25 pagesSeminar Course Report ON Food SafetyYanNo ratings yet
- Copula and Multivariate Dependencies: Eric MarsdenDocument48 pagesCopula and Multivariate Dependencies: Eric MarsdenJeampierr Jiménez CheroNo ratings yet
- EC GATE 2017 Set I Key SolutionDocument21 pagesEC GATE 2017 Set I Key SolutionJeevan Sai MaddiNo ratings yet