You might also like
- Biaxial test methods reviewDocument6 pagesBiaxial test methods reviewGuilherme de FaveriNo ratings yet
- 2005 J Liuetal. Effectpolystyrenebeads GGDocument8 pages2005 J Liuetal. Effectpolystyrenebeads GGGuilherme de FaveriNo ratings yet
- (E.E. Gdoutos) Experimental Analysis of Nano and E (B-Ok - Xyz)Document1,004 pages(E.E. Gdoutos) Experimental Analysis of Nano and E (B-Ok - Xyz)Guilherme de Faveri100% (1)
- 1556 Libre PDFDocument9 pages1556 Libre PDFGuilherme de FaveriNo ratings yet
- Effect of The Mechanical Stretching On The Ferroelectric Properties of A (VDF/TrFE) (75/25) Copolymer FilmDocument4 pagesEffect of The Mechanical Stretching On The Ferroelectric Properties of A (VDF/TrFE) (75/25) Copolymer FilmGuilherme de FaveriNo ratings yet
- Properties of Electrons, Their Interactions With Matter and Applications in Electron MicrosDocument23 pagesProperties of Electrons, Their Interactions With Matter and Applications in Electron MicroswkpfckgwNo ratings yet
- DTS PZ12 11-2012 EngDocument2 pagesDTS PZ12 11-2012 EngGuilherme de FaveriNo ratings yet
- Mechanical Properties of Sugar Palm Fibre Reinforced High Impact Polystyrene CompositesDocument6 pagesMechanical Properties of Sugar Palm Fibre Reinforced High Impact Polystyrene CompositesGuilherme de FaveriNo ratings yet
- Effect of The Mechanical Stretching On The Ferroelectric Properties of A (VDF/TrFE) (75/25) Copolymer FilmDocument4 pagesEffect of The Mechanical Stretching On The Ferroelectric Properties of A (VDF/TrFE) (75/25) Copolymer FilmGuilherme de FaveriNo ratings yet
- Distribution TransformerDocument22 pagesDistribution TransformerRishi Kant SharmaNo ratings yet
- Cinemática Inversa 6-RUSDocument9 pagesCinemática Inversa 6-RUSGuilherme de FaveriNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Maintenance Manpower Planning Model - Research PaperDocument10 pagesMaintenance Manpower Planning Model - Research Paperkaviwicrama100% (1)
- Moment of InertiaDocument7 pagesMoment of InertiaNazir AbdulmajidNo ratings yet
- The New Seven Q.C. Tools TrainingDocument69 pagesThe New Seven Q.C. Tools TrainingPrakash KadirvelNo ratings yet
- 2.problems On Leibnitz TheoremDocument17 pages2.problems On Leibnitz TheoremShubham80% (20)
- Finite Difference Solution of Maxwell's EquationsDocument10 pagesFinite Difference Solution of Maxwell's EquationsmoemeneddaNo ratings yet
- Torsion Reinforcement Influences RC Slab BehaviorDocument6 pagesTorsion Reinforcement Influences RC Slab BehaviorArnold TunduliNo ratings yet
- RTA Road Design GuideDocument609 pagesRTA Road Design GuideTaiCheong Lee89% (9)
- Ch12 Introduction to Coordinates Set 1 Q and Set 2 QDocument43 pagesCh12 Introduction to Coordinates Set 1 Q and Set 2 QAda CheungNo ratings yet
- Stress6 ht08 2Document26 pagesStress6 ht08 2fredrikalloNo ratings yet
- HCDPDocument92 pagesHCDPMuddassar SultanNo ratings yet
- Luenberger David G. - 1984 - Linear and Nonlinear Programming (2nd Edition)Document502 pagesLuenberger David G. - 1984 - Linear and Nonlinear Programming (2nd Edition)noellevilardoNo ratings yet
- HR Demand ForecastingDocument27 pagesHR Demand ForecastingSarathBabuNo ratings yet
- Switch-Mode Power Converter Compensation Made Easy: Robert SheehanDocument38 pagesSwitch-Mode Power Converter Compensation Made Easy: Robert SheehanAbhisek PradhanNo ratings yet
- Financial Ratios As Predictors of FailureDocument42 pagesFinancial Ratios As Predictors of FailureAnonymous lXX5Hhzkw100% (1)
- Dynamic Optimization of Bioreactors: A Review: Julio R. Banga, Eva Balsa-Canto, Carmen G. Moles and Antonio A. AlonsoDocument21 pagesDynamic Optimization of Bioreactors: A Review: Julio R. Banga, Eva Balsa-Canto, Carmen G. Moles and Antonio A. Alonsojmrozo3No ratings yet
- Mte494 Euler Line 1Document8 pagesMte494 Euler Line 1api-532850293No ratings yet
- Program 1: TCS Ninja Coding Questions and Answers 2020Document1 pageProgram 1: TCS Ninja Coding Questions and Answers 2020Adithya SKNo ratings yet
- MasterProgramming - in - BCA C Programing Assignment 2021Document79 pagesMasterProgramming - in - BCA C Programing Assignment 2021Debnath SahaNo ratings yet
- NAVY DSSC Exam Past Questions and AnswersDocument7 pagesNAVY DSSC Exam Past Questions and AnswersEmmanuel AdegokeNo ratings yet
- Chapter 3 - Supervised Learning - Neural Network FinalDocument103 pagesChapter 3 - Supervised Learning - Neural Network Finalapoorva aapoorvaNo ratings yet
- DSP Scan1 New PDFDocument42 pagesDSP Scan1 New PDFRio100% (2)
- Article1381400395 - Pamučar Et AlDocument13 pagesArticle1381400395 - Pamučar Et AlYerson CcasaNo ratings yet
- Mathematics of Cryptography: Algebraic StructuresDocument68 pagesMathematics of Cryptography: Algebraic StructuresSrivathsala Suresh TangiralaNo ratings yet
- Maths Workbook - Basic 5 - 2nd TermDocument54 pagesMaths Workbook - Basic 5 - 2nd TermLateef OlamideNo ratings yet
- Michael Ruggiero ResumeDocument1 pageMichael Ruggiero ResumeMNo ratings yet
- Mediacharge Wear PredictorDocument7 pagesMediacharge Wear PredictorHazem DiabNo ratings yet
- Quadratics CH 4Document48 pagesQuadratics CH 4yddapNo ratings yet
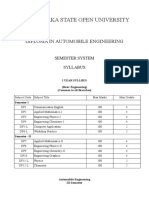
- Distance Automobile Engineering Diploma KSOU, Syllabus Automobile Engineering Distance ModeDocument56 pagesDistance Automobile Engineering Diploma KSOU, Syllabus Automobile Engineering Distance ModeSunil JhaNo ratings yet
- Pursuing MS in ML to Advance ResearchDocument3 pagesPursuing MS in ML to Advance ResearchSangabattulaLokeshNo ratings yet
- SSC CGL 75 Days Study Plan: Reasoning, Quant, GK, EnglishDocument4 pagesSSC CGL 75 Days Study Plan: Reasoning, Quant, GK, EnglishShekhar YadavNo ratings yet