Professional Documents
Culture Documents
Ponti Strallati
Uploaded by
Giovanni Govdòn BugliCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Ponti Strallati
Uploaded by
Giovanni Govdòn BugliCopyright:
Available Formats
Indice
I
INDICE
Capitolo 1 Analisi Preliminare
1.1 Definizione della geometria 1
1.1.1 Passo degli stralli 1
1.1.2 Inclinazione degli stralli 2
1.1.3 Altezza della torre 3
1.2 Scelta dello schema strutturale 3
1.3 Scelta del sistema di sospensione 7
1.4 Scelta della configurazione del pilone 8
1.5 Scelta dellimpalcato 11
Bibliografia 13
Capitolo 2 Analisi Statica
2.1 Predimensionamento 15
2.1.1 Pilone 15
2.1.2 Passo stralli 15
2.1.3 Spessore impalcato 16
2.1.4 Stralli 16
2.1.4.1 Stralli di campata 17
2.1.4.2 Stralli di ormeggio 18
2.1.4.3 Pretensione stralli 19
2.2 Lelemento cavo 21
2.2.1 Strallo sotto sforzi assiali 21
2.3 Modellazione della struttura 30
2.3.1 Modelli piani 30
2.3.2 Modello spaziale 31
2.4 Fenomeni di fatica 32
2.5 Considerazioni sulle linee di influenza 38
2.6 Lanalisi strutturale con il metodo degli elementi finiti 39
2.6.1 Fasi operative 40
2.6.2 Lapproccio agli spostamenti 41
2.6.2.1 Il modello cinematico 41
2.6.2.2 Forze nodali 47
2.6.3 Analisi elastica 50
2.6.3.1 Propriet elastiche di un elemento finito 50
2.6.3.2 Cambiamento di riferimento 52
Indice
II
2.6.3.3 Assemblaggio 55
2.6.3.4 Vincoli e spostamenti assegnati 55
2.6.4 Effetti del secondo ordine (non-linearit geometriche) 56
2.6.4.1 Approccio energetico 56
2.6.4.2 Lo studio dei ponti strallati in regime elastico con il
metodo degli elementi finiti tenendo conto degli effetti
del secondo ordine 60
Metodi risolutivi per problemi non-lineari: il metodo di
Newton-Raphson 62
Metodi risolutivi per problemi non-lineari: metodo di
calcolo incrementale 65
Metodi risolutivi per problemi non-lineari: il metodo
incrementale iterativo di Newton-Raphson 66
Osservazioni sul concetto di matrice di rigidezza
tangente nel riferimento generale 68
Osservazioni sul metodo incrementale iterativo di
Newton-Raphson 70
Valutazione approssimata degli effetti del secondo
ordine: il metodo dei tagli fittizi (effetto P-) 71
2.6.5 Effetti dei tratti rigidi 72
2.6.6 Effetto della deformabilit tagliante 73
Bibliografia 75
Capitolo 3 Analisi Dinamica
3.1 Sistemi discreti a pi gradi di libert 77
3.1.1 Richiami teorici 77
3.1.1.1 Equazioni del moto di sistemi elastici lineari
discreti 77
3.1.1.2 Oscillazioni libere senza smorzamento di sistemi
discreti 79
3.1.2 Determinazione della matrice delle masse 82
3.1.3 Determinazione della matrice di smorzamento 83
3.1.3.1 Osservazioni sulla matrice di smorzamento 85
3.2 Analisi modale 85
3.2.1 Influenza della non-linearit geometrica sullanalisi
modale 86
3.3 Analisi sismica per sovrapposizione modale con spettro di
Risposta 88
Indice
III
3.4 Analisi dinamica mediante integrazione numerica dellequazione
del moto 92
3.4.1 Metodo di Newmark 92
3.4.2 Metodo dellaccelerazione costante media 94
3.4.3 Metodo dellaccelerazione lineare 95
3.4.4 Metodo di Wilson (Wilson- method) 96
3.5 Dinamica delle funi 98
Approccio energetico 98
Considerando lequilibrio dinamico 100
3.6 Interazione suolo-struttura 104
Bibliografia 105
Capitolo 4 Analisi della Stabilit
4.1 La stabilit come problema statico 107
4.1.1 Descrizione del problema 107
4.1.2 Calcolo del carico critico 108
4.1.3 Osservazioni sullanalisi della stabilit dei ponti
strallati 109
4.2 La stabilit come problema dinamico 110
4.2.1 Effetti dinamici del vento 110
4.2.1.1 Oscillazioni forzate 110
4.2.1.2 Oscillazioni autoeccitate 112
4.2.1.2.1 Vibrazioni autoeccitate, dovute al vento, per
interazione di sollecitazioni diverse 113
Flutter 113
Flutter-Buffeting 120
Stall-Flutter 120
Osservazioni sulla determinazione delle velocit
critiche 123
4.2.1.2.2 Vibrazioni autoeccitate, dovute al vento, per
forma del corpo 124
Galloping 124
4.2.1.3 Prevenzione dellinstabilit aerodinamica 128
Bibliografia 129
Conclusioni 131
Analisi Preliminare
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102 1
CAPITOLO 1
ANALISI PRELIMINARE
1.1 DEFINIZIONE DELLA GEOMETRIA
La definizione della geometria di un ponte strallato il primo passo di
un lungo iter costellato da ripetuti cambiamenti dovuti a fattori che si
presentano con le varie fasi del progetto, questo perch il progetto di
un ponte strallato, cos come di molte altre strutture, legato a fattori
economici costruttivi e negli ultimi anni anche estetici. Soprattutto
questultimo spesso prevalente sugli altri. Qui vengono riportati dei
metodi, molte volte dettati dallesperienza maturata con ponti strallati
realizzati in passato, che permettono di definire alcune grandezze
essenziali per poter dimensionare il ponte.
1.1.1 PASSO DEGLI STRALLI
Nei primi ponti strallati erano utilizzati pochi stralli con ampi spazi,
es. Ponte di Maracaibo in Venezuela, Polcevera a Genova realizzati da
RICCARDO MORANDI, il che portava ad avere grandi sforzi nei
cavi i quali richiedevano complicati congegni di ancoraggio nonch
spessori notevoli dellimpalcato per la grande distanza che cera fra i
pochi cavi.
Attualmente si utilizzano molti stralli con spazi molto pi ridotti. I
vantaggi dellutilizzo di una strallatura diffusa sono:
il grande numero di supporti elastici che porta a moderate
flessioni longitudinali dellimpalcato sia durante la costruzione
che in esercizio, rendendo possibile lutilizzo di semplici ed
economici metodi di costruzione;
cavi di diametro pi piccolo rispetto a strutture con stralli
concentrati, il che semplifica la loro installazione, il loro
ancoraggio e soprattutto la loro sostituzione;
Analisi Preliminare
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102 2
la possibilit di poter utilizzare impalcati sottili con enormi
vantaggi dal punto di vista della stabilit aerodinamica.
Il passo degli stralli generalmente mantenuto costante,
orientativamente 6-15 metri, ma potrebbe decrementare andando dal
pilone verso la parte centrale in modo che le forze non siano molto
differenti tra uno strallo e il successivo.
1.1.2 INCLINAZIONE DEGLI STRALLI
Laltezza del pilone influenza molto la rigidezza del sistema
strutturale, infatti con laumento dellinclinazione del cavo diminuisce
la tensione nello stesso, oltre che non linearit e gli sforzi
nellimpalcato.
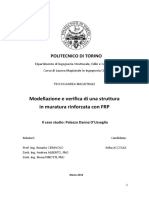
Linclinazione degli stralli pu essere messa in relazione con
labbassamento del nodo che funge da collegamento fra limpalcato e
lo strallo pi inclinato.
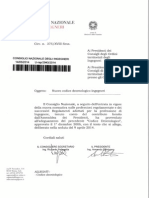
Su tale grafico si vede che linclinazione ottimale dei cavi 45 ma
pu variare nel ragionevole limite di 25-65 (figura 1.1).
I bassi valori dellangolo di inclinazione corrispondono ai cavi esterni,
mentre i valori pi alti corrispondono ai cavi pi vicini al pilone.
Figura 1.1
Analisi Preliminare
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102 3
1.1.3 ALTEZZA DELLA TORRE
Laltezza della torre come funzione della lunghezza a n dei pannelli
pu essere espressa da:
a n a n h = = 465 . 0 25 tan
dove n il numero della campate che insistono fra la torre e lo strallo
pi inclinato.
Pi in generale possiamo scrivere (figura 1.2):
= 25 tan
c
L h
Tale relazione ci fornisce laltezza minima della torre al di sotto della
quale sarebbe opportuno non andare.
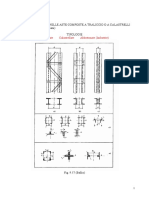
1.2 SCELTA DELLO SCHEMA STRUTTURALE
Gli schemi strutturali tipici dei ponti strallati possono suddividersi in
due categorie fondamentali che si differenziano sostanzialmente
soprattutto nei riguardi del comportamento statico, mentre la loro
differenziazione formale legata solo alla disposizione geometrica
degli stralli, precisamente (figura 1.3):
1. schema con stralli ad arpa;
2. schema con stralli a ventaglio.
Figura 1.2
Analisi Preliminare
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102 4
In merito alla natura dei vincoli esterni ed interni della struttura, gli
esterni di ogni strallo si possono ipotizzare dalle cerniere, senza per
che queste costituiscono degli snodi delle membrature cui fanno capo.
Dal punto di vista statico, considerando due ponti strallati: ad arpa uno
e a ventaglio laltro di uguale caratteristiche geometriche, il ponte ad
arpa induce nellimpalcato uno sforzo normale doppio rispetto a
quello a ventaglio.
Se supponiamo che il passo fra gli stralli sia piccolissimo,
considerando lo schema a ventaglio (figura 1.4), si ha:
x L
H
Tan
dN
dx q
= =
dN
H
dx x L q
=
) (
dx x L
H
q
dN = ) (
=
x
dx
H
x q
H
L q
N
0
H
x q
H
x L q
N
2
2
=
H
L q
H
L q
H
L q
L x N
2 2
) (
2 2 2
max
= =
Figura 1.3
Analisi Preliminare
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102 5
Schema a ventaglio
H
L q
N
2
2
max
=
Per lo schema ad arpa (figura 1.5), si ha, invece:
L
H
Tan
dN
dx q
= =
dN
H
dx L q
=
dx
H
L q
dN
=
x
dx
H
L q
N
0
Figura 1.4
Analisi Preliminare
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102 6
H
x L q
N
=
H
L q
L x N
2
max
) (
= =
Schema ad arpa
H
L q
N
2
max
=
Ipotizzando una strallatura diffusa ( piccolissimo) lo sforzo normale
nellimpalcato pari a:
H
L q
2
per lo schema ad arpa e
H
L q
2
2
per lo
schema a ventaglio. Quindi a parit di sforzo normale nellimpalcato
lo schema ad arpa richiede altezze delle antenne pari a due volte
quella dello schema a ventaglio.
Lo schema ad arpa anche se non il migliore dal punto di vista statico
ed economico attraente per i suoi innegabili vantaggi estetici.
Figura 1.5
Analisi Preliminare
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102 7
Lo schema a ventaglio stato molto usato recentemente e pu offrire
diversi vantaggi, oltre a quello visto precedentemente:
il peso totale dei cavi sostanzialmente minore rispetto al tipo
ad arpa;
linflessione longitudinale dei piloni resta moderata;
maggiore stabilit;
minore inflessione del pilone e dellimpalcato se gli stralli di
ormeggio sono ancorati a terra.
Il tallone dAchille della soluzione a ventaglio risiede nel progetto e
nella costruzione della testa dei piloni verso il quale tutti i cavi,
teoricamente, sono condotti. Una convergenza ideale in pratica non
pu essere realizzata e per questa ragione necessario estendere
lancoraggio ad una zona pi o meno estesa. Si realizza pertanto una
soluzione intermedia fra il tipo ad arpa e quello a ventaglio che unisce
i vantaggi ed elimina gli svantaggi dei due.
Grazie alla diffusione degli stralli nella parte superiore del pilone
possibile un buon progetto degli ancoraggi senza apprezzabili
riduzioni dellefficacia del sistema strallato. I cavi situati vicino al
pilone sono pi inclinati di quelli di un tipo ad arpa, ci rende
possibile ridurre la rigidezza delle connessioni orizzontali tra i piloni e
limpalcato.
1.3 SCELTA DEL SISTEMA DI SOSPENSIONE
Il sistema di sospensione pu essere sostanzialmente di due tipi:
centrale e laterale.
La sospensione centrale offre considerevoli vantaggi, il principale
sicuramente quello di natura estetica. Luso quasi obbligatorio, in tale
sistema, di un impalcato torso-rigido contribuisce inoltre alla
riduzione dei momenti del secondo ordine come pure ad una maggiore
stabilit dinamica & aerodinamica del tutto. Questo metodo di
sospensione caratterizzato inoltre, da un basso carico di fatica dei
cavi, dato che un impalcato torso-rigido ha una grande capacit di
Analisi Preliminare
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102 8
diffusione per i carichi concentrati, cos limita la variazione di
tensione negli stralli.
Gli svantaggi di un tale sistema risiedono, se utilizzato, nel pilone
centrale che posto al centro della carreggiata porta inevitabilmente ad
un aumento della larghezza dellimpalcato. Inoltre, quando si ha a che
fare con impalcati molto larghi, come nel caso di ponti stradali con
due carreggiate, i momenti torcenti diventano eccessivi e pertanto
potrebbe non essere adatto.
La sospensione laterale utilizzata nella maggior parte dei ponti
strallati costruiti finora. Il piano degli stralli pu essere verticale o
inclinato, in questultimo caso si utilizzano piloni a forma di A, i
quali:
migliorano la rigidezza e la stabilit della struttura;
riducono spostamenti dellimpalcato in quanto fa s che i
carichi eccentrici vengono assorbiti da tutti gli stralli (figura
1.6).
migliorano la stabilit aerodinamica nel caso di impalcati
molto lunghi.
Luso di piani di sospensione inclinati pu dar origine a problemi di
spazio nella direzione trasversale che possono per essere risolti o
incrementando la larghezza dellimpalcato o utilizzando sbalzi su cui
installare gli ancoraggi.
Figura 1.6
Analisi Preliminare
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102 9
La sospensione laterale in generale introduce momenti flettenti
trasversali che sono massimi nel centro della sezione, mentre le forze
di taglio lo sono allestremit. In queste zone possono sorgere dei
problemi specialmente se limpalcato in calcestruzzo, in quanto
lancoraggio dei cavi pu scontrarsi con gli eventuali cavi della
precompressione trasversale.
1.4 SCELTA DELLA CONFIGURAZIONE DEL PILONE
La scelta della configurazione longitudinale e trasversale del pilone
legata allo schema strutturale adottato, al tipo di sospensione, agli
effetti provocati dai carichi nonch a fattori estetici.
Lo schema strutturale, ad arpa a ventaglio o misto, pone un grosso
vincolo alla libert di scelta, in quanto, mentre per lo schema a
ventaglio o misto ci si pu orientare indifferentemente verso un pilone
ad un solo braccio (ma anche 2) o ad A, per lo schema ad arpa il
pilone ad uno o due bracci quasi dobbligo, in quanto usandone uno
ad A il piano degli stralli non sarebbe pi verticale.
Con gli stralli nello schema ad arpa i carichi accidentali non
simmetrici possono essere bilanciati solo al costo di una significante
flessione longitudinale nel pilone (figura 1.7).
creare vincoli orizzontali alla testa del pilone usando stralli di
ancoraggio concentrati. Questo conferisce una grande rigidezza a tutta
la struttura.
Per quanto riguarda linfluenza del tipo di sospensione sulla scelta del
tipo di pilone, dove prevista la sospensione laterale il progetto
dovrebbe essere basato tenendo conto delle seguenti condizioni:
sagoma limite per il transito dei vincoli;
Questo quindi, deve avere non solo
unadeguata resistenza a flessione, ma
inoltre, anche una sufficiente rigidezza per
ridurre la deformabilit dellimpalcato, in
particolar modo se questo flessibile.
Luso del tipo a ventaglio offre per gli
stralli innegabili vantaggi dal punto di vista
delle forze nel pilone, nel quale possibile
Figura 1.7
Analisi Preliminare
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102 10
comportamento trasversale del pilone.
Si deve fare in modo di instaurare uno stato di equilibrio
stabile e permanente, prendendo in considerazione anche
linfluenza del creep sotto lazione dei carichi permanenti. Se
necessario la snellezza trasversale dei bracci dovrebbe essere
mantenuta entro ragionevoli limiti per mezzo di aste
trasversali.
Per la sospensione centrale occorre tener presente che porta ad
unaumento della larghezza dellimpalcato, per cui occorre tener conto
anche di fattori economici oltre che strutturali. Per quanto riguarda la
snellezza trasversale questa pu essere mantenuta entro ragionevoli
limiti dalla presenza di una forza orizzontale introdotta dai cavi.
La stabilit trasversale del ponte legata quindi anche alla forma del
pilone, cos come la capacit di ridurre gli effetti torsionali
nellimpalcato. Un pilone ad A senza dubbio il pi adatto per far
fronte a questo tipo di sollecitazioni, anche se dal punto di vista
economico non altrettanto competitivo, come si pu vedere dal
grafico seguente che esprime la relazione fra lincremento di costo e la
geometria del pilone (figura 1.8).
Figura 1.8
Analisi Preliminare
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102 11
Una grande influenza sulla scelta della geometria del pilone si ha nel
caso dei ponti strallati asimmetrici, con la campata di riva pi corta
della campata principale. In questi casi conveniente inclinare il
pilone verso la campata pi corta in modo da far lavorare il pilone a
compressione sotto carichi permanenti ed aumentare in questo modo
la rigidezza della struttura (figura 1.9).
1.5 SCELTA DELLIMPALCATO
Limpalcato come forma e dimensione dipende da vari fattori i quali
vanno ad influenzare anche la scelta del materiale da utilizzare.
Il numero degli stralli influenza laltezza dellimpalcato anche se tale
altezza limitata inferiormente dalla dimensione degli apparecchi di
ancoraggio. Se il tipo di sospensione centrale limpalcato deve
possedere unelevata rigidit torsionale il che ci dirige verso impalcati
a cassone in C.A. o in acciaio. I metodi di costruzione e soprattutto
leconomia sono fattori importanti al pari degli altri, infatti se da una
parte un impalcato in acciaio pu arrivare a pesare 1/5 di uno
equivalente in cemento armato, dallaltro lato esso 2-4 volte pi
costoso di uno equivalente in calcestruzzo. Quindi la riduzione del
peso proprio dellimpalcato deve comportare un risparmio in altre
parti della struttura (stralli, piloni e fondazioni) per poter essere
competitivo con un impalcato in cemento armato. Nel caso dei ponti
di grande luce la riduzione del peso diventa vitale e possono essere
presi in considerazione solo impalcati molto leggeri, come quelli in
acciaio. Per gli impalcati in cemento armato laltezza si aggira su
1/100-1/200 della luce.
Figura 1.9
Analisi Preliminare
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102 12
Esempio di impalcato in CA
Analisi Preliminare
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102 13
BIBLIOGRAFIA
[1] Walther R., Cable stayed bridges, Thomas Telford, London, 1999.
[2] Troitsky M.S., Cable-stayed Bridges, Theory and Design, Crosby
Lockwood Staples, London, 1977.
[3] De Miranda F., I ponti strallati di grande luce, Ed. Scientifiche A.
Cremonese, Roma, 1980.
[4] Gimsing N.J ., Cable Supported Bridges, Concept & Design, J ohn
Wiley & Sons, Chichester, 1996.
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102 14
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
15
CAPITOLO 2
ANALISI STATICA
2.1 PREDIMENSIONAMENTO
La fase di predimensionamento senza alcun dubbio la fase con pi
incertezze, in quanto occorre stabilire le dimensioni, molte volte di
tentativo, da dare ai vari elementi strutturali. In questa fase possibile
utilizzare modelli molto semplici ed espressioni semplificate che non
tengono conto di effetti del secondo ordine e a lungo termine.
2.1.1 PILONE
Laltezza del pilone dallimpalcato pu essere stabilita, nel caso di
sistema a ventaglio o misto, con la seguente relazione:
25 tan
c
L h (2.1)
con L
c
lunghezza della campata principale, nel caso di ponte
asimmetrico o della semicampata principale nel caso di ponte
simmetrico.
2.1.2 PASSO STRALLI
Utilizzando una strallatura molto fitta si potrebbe ridurre
notevolmente lo spessore dellimpalcato, comunque generalmente
compreso fra i 6 e i 15 metri, per gli impalcati in cemento armato,
maggiore di 20 metri per gli impalcati in acciaio.
La sezione pu essere stabilita
considerando uno sforzo normale pari
alla sommatoria delle componenti
verticali degli sforzi negli stralli
(figura 2.1).
Figura 2.1
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
16
2.1.3 SPESSORE IMPALCATO
Lo spessore generalmente oscilla, nel caso di impalcati in cemento
armato fra 1/100 & 1/200 della luce della campata maggiore, anche se
occorre tener conto dello spessore minimo imposto dalle connessioni,
generalmente 1 metro.
2.1.4 STRALLI
Nel predimensionamento degli stralli occorre tener presente degli
eventuali sforzi di pretensione e dei fenomeni di fatica.
In questa fase opportuno riferirsi ad uno schema a ventaglio puro
equivalente ad uno schema misto arpa-ventaglio. Laltezza del pilone
equivalente pari a:
an pa
h h H
3
2
+ (2.2)
dove h
pa
la distanza da terra dellancoraggio pi vicino, mentre h
an
la distanza su cui vengono distribuiti gli stralli sul pilone (figura 2.2).
Figura 2.2
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
17
2.1.4.1 STRALLI DI CAMPATA
Per il predimensionamento degli stralli di campata si pu utilizzare la
seguente espressione:
amm
i sc
i sc
T
A
,
,
con
i PTR
i i
i
i sc s
i
i sc
T
l
A
d
P
q g T
, , ,
cos sin sin 30
+
,
_
+ +
e
amm amm
30 . 0 , come risulta da numerose prove a fatica.
Dividendo ambi i membri per
amm
, si ottiene:
amm
i PTR
i i
i
i sc s
i
i sc
amm
i sc
T
l
A
d
P
q g A
T
1
]
1
,
_
+ +
1
cos sin sin 30
, , ,
,
amm
i PTR
i i i
i s
amm
i sc
i sc
T
d
P
q g
l
A
A
1
]
1
,
_
+ +
,
_
1
sin 30 cos sin
,
,
,
Figura 2.3
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
18
amm
i PTR
i amm i i
i s
i sc
T
d
P
q g
l
A
1
]
1
,
_
+ +
,
_
1
sin 30 cos sin
1
, ,
,
_
,
_
+ +
amm i i
i s
amm
i PTR
i
i sc
l
T
d
P
q g
A
cos sin
1
sin 30
,
,
(2.3)
Occorre fare unosservazione per quanto riguarda i carichi concentrati.
Essi vengono divisi per d 30 , con d spessore dellimpalcato, per tener
conto, in modo approssimato, dellinfluenza degli stralli vicini. Una
tale ipotesi si pu giustificare col fatto che se limpalcato fosse
infinitamente rigido, il carico P dovrebbe essere ripartito fra tutti gli
stralli, in parti pi o meno uguali, mentre se limpalcato avesse
rigidezza flessionale nulla il carico P graverebbe interamente sullo
strallo su cui applicato.
2.1.4.2 STRALLI DI ORMEGGIO
Per il predimensionamento degli stralli di ormeggio occorre tener
conto, in modo particolare, dei carichi accidentali, perch alcuni stralli
potrebbero essere soggetti a sforzi di compressione che, oltre a portare
ad una diminuizione di rigidezza, risultano particolarmente dannosi in
relazione ai fenomeni di fatica.
Questi sforzi di compressione sono molto grandi negli stralli di
ormeggio quando caricata la campata di riva, come risulta dalla
figura 2.4.
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
19
Per evitare i problemi su accennati bene che:
25 . 0
max
min
ac
ac
ac
T
T
K (2.6)
2.1.4.3 PRETENSIONE STRALLI
Per far si che sotto lazione dei carichi permanenti limpalcato si
comporti come una trave continua su appoggi fissi, si regola la
tensione negli stralli applicando opportuni sforzi di pretensione. Lo
sforzo di trazione T
i
nella generica fune quindi dovr essere tale che la
sua componente verticale sia pari proprio alla reazione R
i
dovuta ai
carichi permanenti che si avrebbe nella trave continua equivalente:
R
i
= T
i
sin
i
Il diagramma dei momenti provocato dai carichi permanenti allora
quello di figura 2.5 e si vede come per un numero di stralli elevato
esso tende praticamente a zero e la trave soggetta solo a sforzo
normale.
( )
ac
n
i
n
j
j j j i i
ac
h
a P G a G
T
cos
min
1 1
(2.4)
( )
ac
n
i
n
j
j j i i i
ac
h
a G a P G
T
cos
max
1 1
(2.5)
Figura 2.4
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
20
Figura 2.5
Gli sforzi di pretensione possono essere determinati anche seguendo
unaltra via, un po pi laboriosa, e diversa a seconda della tipologia: a
ventaglio, ad arpa o misto.
Il problema viene definito sfruttando condizioni di congruenza in
relazione agli spostamenti che si vogliono annullare, quindi:
1
1
1
1
1
1
]
1
1
1
1
1
1
1
]
1
+
1
1
1
1
1
1
]
1
1
1
1
1
1
1
]
1
0
0
1
1
1 11 1
!
!
!
!
!
!
" " "
! # !
! # !
! # !
" " "
!
!
!
n nn n
n
n
D D
D D
N
N
dove:
N
i
= sforzo normale dello strallo i-esimo;
[D] = matrice di flessibilit;
i
= spostamento del nodo i-esimo.
Per la tipologia a ventaglio il sistema di equazioni di congruenza
risulta generalmente determinato. Per le tipologie ad arpa o miste il
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
21
problema diventa pi complesso, infatti il numero degli spostamenti
da annullare quello relativo allimpalcato, con gli spostamenti
verticali, ed allantenna, con gli spostamenti orizzontali. Il problema
indeterminato in quanto si ha un numero di equazioni maggiore del
numero di incognite. La risoluzione del problema pu essere ottenuta
tramite una diminuzione delle equazioni, oppure facendo entrare in
gioco altre grandezze finch il sistema risulta determinato. Tutto ci
implica in molti casi soluzioni che sono solo il risultato di un
procedimento analitico che induce spostamenti e tensioni
inammissibili da un punto di vista pratico. Inoltre con tale
procedimento, che si appoggia alla teoria del 1 ordine, non teniamo,
in alcun modo, in considerazione gli effetti delle non linearit, sia
geometriche che meccaniche.
2.2 LELEMENTO CAVO
2.2.1 STRALLO SOTTO SFORZI ASSIALI
Le funi sono degli elementi strutturali che hanno una rigidezza
flessionale e tagliante bassissima, hanno viceversa una elevata
rigidezza assiale.
Consideriamo una fune soggetta ad un carico uniformemente
distribuito q, che rappresenta il peso proprio, e ad un tiro H .
Figura 2.6
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
22
Scriviamo il funzionale Energia Potenziale Totale:
l l
u H dx w q dx N
0 0
2
1
min (2.7)
ovvero:
l l
u H dx w q dx A
0 0
2
2
1
min E (2.8)
scriviamo la variazione prima del funzionale EPT:
l l
u H dx w q dx A
0 0
0 E (2.9)
ovvero:
0
0 0
u H dx w q dx N
l l
(2.10)
considerando la deformazione al 2 ordine:
2
, 2
1
, x x
w u + si ha:
x x x
w w u
, , ,
+
che sostituita nellespressione (2.10), fornisce:
( ) 0
0 0
, , ,
+
u H dx w q dx w w u N
l l
x x x
(2.11)
0
0 0 0
, , ,
+
u H dx w q dx w w N dx u N
l l l
x x x
(2.12)
integrando per parti la (2.12), si ottiene:
( ) 0
0 0 0
,
,
0
, ,
0
+
u H dx w q dx w w N w w N dx u N u N
l l l
x
x
l
x x
l
(2.13)
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
23
Dalla (2.13) otteniamo le cosiddette Equazioni di Eulero:
0
0
,
l
x
dx u N 0
,
x
N
( )
l l
x
x
dx w q dx w w N
0 0
,
,
0
( ) [ ] 0
0
,
,
+
l
x
x
dx w q w N ( ) 0
,
,
+ q w N
x
x
che possiamo riscrivere come:
dalla prima espressione si evince che N=costante, pertanto la seconda
espressione:
( ) q w N
x
x
,
,
diventa:
q w N
xx
,
(2.14)
Dalla (2.13) otteniamo anche le condizioni al contorno:
0
0
,
0
+ u H w w N u N
l
x
l
(2.15)
ma 0
,
w w N
x
se
( )
( ) 0
0 0
l w
w
, quindi 0
,
x
w N e la (2.15) si
semplifica in:
0 H N H N u
Al di l delle espressioni differenziali, si evidenzia il fatto che per una
fune la soluzione in campo lineare non esiste, inoltre, per essere valide
le relazioni precedenti, la fune deve essere molto tesa.
( )
'
q w N
N
x
x
x
,
,
,
0
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
24
Alla luce di quanto visto precedentemente, consideriamo un filo in
tensione, in equilibrio sotto il suo peso e supponiamo che le sue
estremit siano fisse e che la tensione sia sufficientemente elevata, in
modo che la sua configurazione di equilibrio y(z) sia molto poco
discosta dalla configurazione rettilinea.
Lequazione di equilibrio :
q w N
xx
,
(N=cost.) (2.16)
mentre le condizioni al contorno sono: ( ) ( ) 0 0 l w w .
Riscrivendo la (2.16) come
N
q
w
xx
,
e integrando, si ha:
1 ,
C x
N
q
w
x
+
2 1
2
2
C x C x
N
q
w + + (2.17)
Imponendo le condizioni al contorno, otteniamo:
( ) 0 0
2
C w
( ) 0
2
1
2
+
l C
N
l q
l w
N
l q
C
2
1
sostituendo C
1
e C
2
nella (2.17), si ha:
( ) x
N
l q
x
N
q
x w
+
2 2
2
(2.18)
dividendo numeratore e denominatore della (2.18) per larea A della
fune, otteniamo:
( ) x
A
N
A
l q
x
A
N
A
q
x w
+
2 2
2
(2.19)
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
25
introducendo il peso specifico del materiale di cui il filo costituito:
A
q
e la tensione nel filo:
A
N
la (2.19) diventa:
( ) x
l
x x w
2 2
2
ovvero:
( ) ( ) x l x x w
2
(2.20)
La lunghezza L del filo nella sua configurazione di equilibrio pari a:
( ) dx w L
l
2
1
0
2
' 1
+ (2.21)
con ( )
x l
x x l w
2 2 2
' e tenendo conto dello
sviluppo in serie di Taylor ...
8 2
1 1
2
+ + +
arrestato al
secondo termine, si ha:
( )
1
1
]
1
,
_
,
_
+ +
l l l
dx
x l
dx
w
dx w L
0
2
0
2
2
1
0
2
2 2
1
1
2
'
1 ' 1
,
_
+
1
]
1
,
_
+
dx
x x l l
dx
x x l l
l l
0
2
2 2
2
2
2
2 2
0
2
2 2
2
2
2
2 2
2 2 8
1
4 2
1
1
,
_
+
2
2 2
0
2
3 2
2
2 2
2
2 2
24
1
6 4 8
l
l
x x l x l
x
l
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
26
quindi la lunghezza L del filo nella configurazione di equilibrio :
1
1
]
1
,
_
+
2
2 6
1
1
l
l L (2.22)
Supponiamo ora di applicare un incremento dN di tiro al filo, esso
assumer una nuova configurazione di equilibrio e le quantit l, L,
rispettivamente distanze tra le estremit del filo lungo x, e la
lunghezza del filo, assumeranno i valori l+dl, L+dL.
Calcoliamo, in funzione di dN, il valore dL.
2 3 2
2
3 2
24
1
24
1
+
l l
l
l L
differenziando otteniamo:
d
l
dl
l
dl dL
3
3 2
2
2 2
12
1
8
1
+ (2.23)
essendo la costante lungo il filo, lincremento d della deformazione
pu valutarsi come:
L
dL
d
risulta, quindi:
1
1
]
1
,
_
1
1
]
1
,
_
+
1
]
1
,
_
2
3
3 2
2
2
2 2
2 6
1
1
12
1
2 6
1
1
8
1
1
l
l
d
l
l
l
l
dl
L
dL
1
1
]
1
,
_
1
1
]
1
,
_
+
1
]
1
,
_
+
2
3
2 2
2
2
2 2
2 6
1
1
12
1
2 6
1
1
4 2
1
1
l
d
l
l
l
l
dl
d
L
dL
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
27
1
1
]
1
,
_
1
1
]
1
,
_
+
1
1
]
1
,
_
2
3
2 2
2
2
2 6
1
1
12
1
2 6
1
1
2 2
1
1
l
d
l
l
l
l
dl
d (2.24)
la quantit
2
2
,
_
l
molto piccola rispetto allunit, nei casi che
interessano, si ha pertanto:
d
l
l
dl
d
3
2 2
12
1
ma d E d , quindi:
d E
l
l
dl
d
3
2 2
12
1
l
dl
E
l
d
,
_
+
3
2 2
1
l
dl
E
l
d
3
2 2
1
1
+
un incremento di tensione d pu allora esprimersi come:
l
dl
E l
E
d E d
3
2 2
1
+
Se consideriamo come parametro della deformazione la quantit
l
dl
al posto di quello effettivo
L
dL
, dovr, allora, considerarsi il
modulo fittizio, detto di DISCHINGER
3
2 2
*
1
E l
E
E
+
(2.25)
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
28
quindi
* * *
d E
l
dl
E d .
La quantit d
*
costituisce un parametro fittizio della variazione della
deformazione del filo; se infatti aumentiamo di dN il tiro, a parte
lincremento della estensione del filo, questo assumer un nuovo
assetto di equilibrio sotto lazione del suo peso e quindi una nuova
curva pi tesa.
Il modulo di elasticit di DISCHINGER pu cos definirsi, per un
valore assegnato di , come il valore del modulo tangente sulla curva
tensione-deformazione fittizia.
Il modulo tangente E
*
permette di valutare la relazione tra piccoli
incrementi di tensione e deformazione, a partire da una assegnata
configurazione del cavo. Per incrementi finiti di tensione e
deformazione
*
, si opera mediante la relazione globale:
( )
,
_
+
+
2
1
2
1
2
1
*
2
*
1
3
2 2
3
2 2
*
* *
12
1
12
1
d
l
E
E l
E
d
E
d
d
Figura 2.7
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
29
,
_
+
2
2
2
1
2 2
1 2
2
2 2 3 2 2
1 1
24 24 12
2
1
2
1
2
1
2
1
l
E
l
E
d
l
E
d
La relazione precedente pu essere messa nella forma pi
conveniente:
*
*
Es
dove Es
*
il modulo secante e vale:
( )
2
1
2
2 2
2
2
1
2 2
2
2
2
1
2 2
1 2
1 2
*
1
*
2
1 2 *
24
1
1 1
24
,
_
E l
E
l
E
Es
poniamo
1 2
( ) ( )
+
+
+
+
1
24
1
24
1
2 3
1
2 2
1 1 2 4
1
2 2
*
E l
E
E l
E
Es
2 3
1
2 2
*
2
1
12
1
E l
E
Es (2.26)
Lespressione (2.26) mostra che per valori elevati di , luso del
modulo tangente alla DISCHINGER pu comportare errori sensibili.
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
30
2.3 MODELLAZIONE DELLA STRUTTURA
La simulazione di una struttura con un modello, consiste in una sua
idealizzazione con un sistema, di appropriati membri, che permette di
analizzare il suo comportamento con sufficiente accuratezza e con una
ragionevole quantit di calcoli.
A seconda della complessit della struttura e della fase progettuale a
cui si giunti possono essere usati diversi modelli. Questi possono
essere piani o spaziali.
I piloni e limpalcato possono essere modellati con elementi di tipo
BEAM, nel caso di modelli piani, anche con elementi di tipo SHELL
nel caso di modelli spaziali.
I cavi possono essere rappresentati da elementi BEAM dando loro una
piccolissima inerzia flessionale e un modulo ideale di elasticit
(MODULO DI DISCHINGER) per tener conto degli effetti dovuti
allinflessione del cavo. Questo modello di simulazione possibile
specialmente quando abbiamo a che fare con strutture i cui cavi sono
sufficientemente tesi sotto i carichi permanenti, in modo da non avere
sforzi di compressione, ma solo una riduzioni della tensione iniziale
sotto i carichi accidentali. In questo modo lanalisi pu essere
condotta utilizzando semplici programmi lineari.
2.3.1 MODELLI PIANI
Il comportamento dei ponti strallati sotto lazione dei carichi
accidentali difficile da descrivere per mezzo di semplici metodi
intuitivi. E cosi vantaggioso, durante la fase iniziale di progettazione
avere disponibile un modello semplificato, in cui tutti gli elementi
sono rappresentati da elementi di tipo BEAM (figura 2.8). In tal caso
una difficolt giace nella rappresentazione delle connessioni tra piloni
& impalcato, in quanto potrebbe essere causa di fenomeni di
instabilit numerica nel caso ci si affidi ad un elaboratore elettronico.
Per la semplicit con cui vengono introdotti i dati e la velocit alla
quale vengono eseguiti i calcoli, il modello piano pu servire non solo
come base per dimensionare la struttura, ma anche come parametro
per approvare il progetto stesso. Inoltre, anche quando si prepara il
calcolo finale utilizzando un modello spaziale, il modello piano pu
servire per verificare lordine di grandezza dei risultati e mettere in
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
31
evidenza errori numerici presentati dal programma per una errata
modellazione spaziale della struttura.
2.3.2 MODELLO SPAZIALE
Anche se alcune volte sufficiente un modello piano, nel caso di ponti
di una certa importanza necessario ricorrere ad un modello spaziale
(figura 2.9), in modo da eseguire unanalisi pi dettagliata. Ci sono
aspetti, infatti, che un modello piano non pu cogliere come ad
esempio gli effetti torsionali provocati dai carichi eccentrici o quelli
provocati da alcuni modi di vibrazione.
Figura 2.8
Figura 2.9
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
32
2.4 FENOMENI DI FATICA
Lesperienza mostra che, se soggetto a sforzi variabili, un elemento
strutturale pu giungere a rottura anche se i valori di picco si
mantengono sempre al di sotto del limite elastico. Il numero di cicli
necessario in genere notevolmente elevato, ma non sempre tale da
eccedere quello delle ripetizioni di carico previste nella vita della
struttura. Il fenomeno, noto come rottura per fatica, rappresenta a
volte la situazione di crisi su cui va basato il dimensionamento.
Anche in materiali duttili esso si verifica senza evidenziare segni di
apprezzabili deformazioni plastiche e presenta quindi caratteristiche
tipiche della rottura fragile.
Lo studio teorico della resistenza a fatica presenta difficolt
considerevoli e solo negli ultimi anni sono stati proposti approcci
analitici basati sulla Meccanica delle Fratture. Allo stato attuale,
tuttavia, la base per la comprensione del fenomeno continua ad essere
linterpretazione e la classificazione dei dati sperimentali, dal cui
insieme si cerca di ricavare indicazioni operative. Indicazioni che
possono essere attinte dai diagrammi di hler o W$ $ , dal nome dello
studioso che per primo si occup del fenomeno.
E innanzitutto necessario introdurre i parametri che caratterizzano la
sollecitazione ciclica. Si consideri un provino soggetto a stato di
sforzo uniassiale, variabile ciclicamente tra
max
e
min
(figura 2.10).
Lesperienza mostra che la particolare legge di variazione allinterno
di questi valori estremi di fatto ininfluente. Lo stesso pu dirsi per la
frequenza con cui susseguono i valori di picco, almeno nellintervallo
di rilevanza applicativa. Questa caratteristica riveste importanza
notevole, perch consente di operare sperimentalmente con variazioni
anche molto rapide e quindi assoggettare il provino a un numero
elevato di cicli in tempi relativamente brevi.
Un ciclo di ampiezza costante definito dalle quantit (figura 2.10)
2
min max
m
min max
(2.27a, b)
note, rispettivamente, come tensione media e ampiezza del ciclo. Si
vedr che la rottura dipende non solo dallintervallo di variazione per
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
33
gli sforzi ma anche dal valore attorno a cui essi oscillano
simmetricamente.
In alternativa alle (2.27a, b), il ciclo pu essere caratterizzato dal
valore
max
e dal rapporto
max
min
(2.28)
noto come coefficiente di asimmetria del ciclo o, brevemente,
rapporto di fatica. Nel caso in cui sia
min
=-
max
, risulta =-1 e il
ciclo detto simmetrico (figura 2.11a). Per =0 si ha un ciclo pulsante
(figura 2.11b) mentre per =1 corrisponde al caso limite di sforzo
costante (figura 2.11c). Il rapporto di fatica definito in modo che
risulti sempre -11, invertendo se necessario il secondo membro
della (2.28).
Figura 2.10
Figura 2.11
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
34
Il caso di interesse quello pulsante, in quanto lo strallo non reagisce
a compressione.
Le prove sono condotte tenendo fissi i valori di e
max
(o,
equivalentemente, di
m
e ) e si propongono di determinare il
numero N di cicli che il provino pu sopportare prima di giungere a
rottura, a volte indicato come vita a fatica. I risultati sono riassunti dai
diagrammi di hler o W$ $ (figura 2.12a); essi riportano, per un dato , il
valore di
max
in funzione della corrispondente vita a fatica ( di regola
rappresentata in scala logaritmica, essendo N un numero molto
elevato). Il valore di
max
diminuisce allaumentare di N, ma spesso la
diminuzione cessa una volta raggiunto un certo numero N di cicli
(per gli acciai pari a circa
6
10 2 ), al di la del quale
max
si assesta su
di un valore costante
( )
, noto come resistenza a fatica ( lindice ( )
distingue il particolare valore del rapporto (2.28) cui la prova si
riferisce: per un ciclo pulsante, la resistenza a fatica si indica con
( ) 0
). Se
( )
<
max
, il provino in grado di sopportare senza
giungere a rottura un numero anche illimitato di cicli.
La figura 2.12b confronta schematicamente i diagrammi di
hler o W$ $ relativi a diversi valori di . Per 1 (sforzo costante) la
resistenza a fatica coincide ovviamente con il limite di rottura del
materiale
( )
( )
R
1
. Per un certo valore di N, una qualunque
sollecitazione ciclica ( ) 1 < provoca rottura per un
max
inferiore a
R
. A parita di
max
, la vita a fatica diminuisce con . Il rapporto di
fatica quindi un indice della severit del ciclo: la situazione pi
sfavorevole corrisponde al ciclo simmetrico 1 .
Figura 2.12
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
35
E opportuno fare unosservazione sul numero N di cicli su cui si
stabilizza la resistenza a fatica. Una semplice analisi indica che
sarebbe completamente assurdo assumere che il carico accidentale
totale possa essere applicato due milioni di volte, come richiesto dai
codici per i tests da fatica. Se, per esempio, la vita attesa per il ponte
fissata in 100 anni, questo carico dovrebbe aversi pi di 50 volte al
giorno, per raggiungere quel numero di cicli ( )
6
10 2 . Questo mostra
chiaramente che bisogna prendere in considerazione solo una frazione
del carico accidentale totale quando controlliamo la resistenza a fatica.
Sulla base di quanto detto precedentemente possibile dimensionare il
cavo a fatica.
Detto
q g
N N N + il massimo valore dello sforzo assiale in un
generico cavo, la sua area A pari a:
( ) F
a
N
A
(2.29)
dove:
( )
( )
1
F
a
a
(2.30)
la tensione ammissibile a fatica, funzione del rapporto
( )
q g g
+ / /
max min
fra i valori minimo e massimo della
tensione nel cavo e del valore caratteristico ( )
a
della resistenza a
fatica del materiale e del tipo di cavo adottato (a fili paralleli, o a
trefoli, ecc.). La (2.30) uniperbole con asintoto verticale di
equazione 1 , i cui punti al di sopra del punto di incontro della
curva stessa con la retta di equazione:
( ) ( ) S
a
F
a
(2.31)
(essendo
( ) S
a
la tensione ammissibile statica), non hanno alcun
interesse nella pratica tecnica, in quanto la curva:
( )
( ) x f
F
a
dopo
tale punto deve intendersi completata dalla (2.31) (figura 2.13).
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
36
Poich in base ai risultati di un grandissimo numero di prove a fatica
sui cavi ed ai dati di varie Normative, risulta generalmente:
( )
( ) S
a
30 . 0
a
(2.32)
se nella (2.30) poniamo il valore (2.32), dalla stessa si ricava
immediatamente lascissa x del punto di incontro fra la (2.30) e la
(2.31) che risulta: 0.70 x . Soltanto se nelle condizioni di esercizio
del ponte i valori delle tensioni nei cavi sono tali che risulti:
1 7 . 0 , si utilizza completamente lelevata resistenza dei cavi e la
riduzione di E
*
rispetto ad E la minima possibile.
Abbiamo detto che, per motivi statistici, bisogna prendere in
considerazione solo una frazione del carico accidentale, pertanto il
rapporto di fatica, determinato strallo per strallo, pari a:
q g
g
q g
g
N N
N
5 . 0 5 . 0 +
(2.33)
in cui al valore effettivo di
q g
+
max
si sostituisce il valore
ridotto:
q g
5 . 0 + .
Figura 2.13
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
37
Si ottiene cos un valore
( ) F
a
un po maggiore di quello che si
otterrebbe con il valore effettivo ( ) ( )
q g g q g g
N N N + + / / ,
ma naturalmente nel dimensionamento della sezione del cavo
attraverso la (2.29) si introduce lintero valore di
max
N .
Specificatamente alla resistenza a fatica degli stralli si pu dire che
essa sempre condizionata dalla resistenza degli ancoraggi, inferiore
di quella del singolo elemento costituente la fune. Ci per due motivi:
lacciaio dei fili ( o dei trefoli) in prossimit dellancoraggio
alterato dai morsetti, nel caso di cavi tipo C.A.P.. Nel caso di
teste fuse, quali sono quelle che ancorano le funi spiroidali,
lalterazione dovuta a fatti termici conseguenti alla fusione;
alla dovute alle variazioni di tiro negli stralli se ne
aggiungono altre dovute alla flessione del cavo che, nella
realt, non totalmente privo di rigidezza flessionale come
schematizzato nei calcoli.
Queste tensioni di flessione, a tutti gli effetti parassite, dipendono
dallangolo di cui ruota lo strallo in servizio a causa dei carichi
accidentali, dei fatti termici e delle vibrazioni della fune provocate dal
vento. Esse si smorzano rapidamente appena aumenta la distanza
dallancoraggio.
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
38
2.5 CONSIDERAZIONI SULLE LINEE DI INFLUENZA
Durante la fase finale del progetto le linee di influenza rendono
possibile conoscere accuratamente quella parte degli sforzi normali
negli stralli dovuti ai carichi accidentali distribuiti e concentrati. Ci
nonostante luso di queste linee caratteristiche possibile solo se il
comportamento statico della struttura pu essere assunto come elastico
lineare (principio di sovrapposizione degli effetti).
Sebbene il comportamento di un ponte strallato non lineare,
possibile fare le seguenti semplificazioni.
Le non linearit dovute alle inflessioni degli stralli possono
generalmente essere superate con una via sufficientemente
accurata usando il modulo di Dischinger. E, tuttavia,
necessario stimare in anticipo le tensioni estreme in ciascun
cavo, il che conduce a diverse iterazioni.
Linfluenza delle non linearit geometriche del comportamento
dei piloni e dellimpalcato (effetti del secondo ordine) sulle
forze normali negli stralli generalmente rimangono moderate
nella fase di esercizio.
Linfluenza delle non linearit del materiale del
comportamento dei piloni e dellimpalcato generalmente
limitata negli stati limite di servizio agli effetti del ritiro e del
creep del calcestruzzo. Questi due casi possono essere simulati
utilizzando anche programmi elastici convenzionali,
considerando il ritiro come un carico dovuto ad un gradiente
termico negativo e introducendo moduli di elasticit ridotti per
simulare il creep.
Le linee di influenza ci aiutano a disporre i carichi nelle peggiori
posizioni. C da dire, per, che tali disposizione nella realt sono
molto improbabili e la loro influenza di solito modesta.
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
39
2.6 LANALISI STRUTTURALE CON IL METODO
DEGLI ELEMENTI FINITI
Il metodo degli elementi finiti, o pi sinteticamente FEM, un metodo
di analisi che ha avuto negli ultimi anni una notevole diffusione,
grazie alla possibilit di utilizzare programmi di calcolo, su di esso
basati, anche su personal computers. Il metodo non per altrettanto
recente, in quanto quasi cento anni fa era stata avanzata lipotesi di
una suddivisione astratta del mezzo continuo, ma la mancanza di
mezzi di calcolo automatico fece suscitare un limitato interesse a
causa del notevole onere computazionale che la sua applicazione
comportava.
In effetti il metodo nasce nella seconda met degli anni 50, in quanto
nella prima met fu reso disponibile il primo linguaggio simbolico: il
FORTRAN. Ci ha segnato una svolta nellutilizzo pratico dei mezzi
di calcolo. Se prima essi erano riservati a specialisti in grado di
operare con gli strumenti logici dettati dalla macchina, lavvento dei
linguaggi simbolici ha consentito a un gran numero di utenti di
interloquire con il calcolatore attraverso un simbolismo matematico
sostanzialmente standard. Il metodo degli elementi finiti e il suo
straordinario successo sono quindi legati alla disponibilit di potenti
mezzi di calcolo. Pi che su di un rinnovamento dei fondamenti
meccanici del problema strutturale, esso si basa su di una
riorganizzazione che li adatta alle esigenze dellautomazione del
processo risolutivo. Ne risultato un procedimento estremamente
potente e versatile, che in linea di principio consente la soluzione di
qualunque problema, non solo strutturale, affidando quasi per intero
alla macchina lonere di calcolo.
La disponibilit sul mercato di moltissimi codici basati sul FEM ha
dato la possibilit a tutti di analizzare strutture molto complesse,
anche in campo non lineare. E sbagliato, per, affidarsi ciecamente al
codice di calcolo senza conoscere i fondamenti del metodo, non solo
per evitare errori nella modellazione della struttura, ma anche per
avere la capacit di controllare e interpretare i risultati che il codice
fornisce.
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
40
2.6.1 FASI OPERATIVE
1. Definizione dello schema discreto. Occorre operare una
suddivisione in elementi finiti, tra loro connessi in alcuni punti,
o nodi. Questa suddivisione definisce lo schema oggetto di
calcolo. Gli spostamenti locali vengono approssimati da
combinazioni lineari di funzioni assegnate, di regola polinomi.
2. Definizione delle propriet dellelemento. Il modello viene
espresso in funzione dei valori assunti dagli spostamenti locali
nei nodi. A tali valori (spostamenti nodali u) corrispondono,
tramite unequivalenza in termini di lavori virtuali, le forze
nodali p. Il comportamento dellelemento isolato descritto da
un legame tra queste quantit, cui si risale dalla legge
costitutiva del materiale. Nel caso elastico lineare questo si
esprime attraverso la relazione u k p , dove p contiene anche
le soluzioni di incastro perfetto dei carichi eventualmente
agenti sullelemento. In questa fase spesso conveniente
operare in riferimenti locali, dettati dalla particolare geometria
dei singoli elementi. Le propriet dellelemento vengono poi
trasferite nel riferimento globale mediante opportune leggi di
trasformazione.
3. Assemblaggio. Loperazione ricostruisce la continuit della
struttura. I vari elementi vengono tra loro collegati imponendo
che gli spostamenti dei nodi che hanno in comune assumano lo
stesso valore. Dal momento che questi sono ora tutti
rappresentati nello stesso riferimento, risultano direttamente
sovrapponibili e lassemblaggio si riconduce ad una procedura
di identificazione, che viene effettuata automaticamente a
partire da poche e semplici informazioni. Lassemblaggio
comprende leliminazione degli spostamenti impediti dai
vincoli esterni (o limposizione di cedimenti vincolari, se
diversi da zero).
4. Calcolo della soluzione. Ad assemblaggio effettuato, le
equazioni risolventi si presentano, nel caso elastico lineare,
nella forma U K P , dove K simmetrica e, una volta
eliminati eventuali moti rigidi residui non impediti dai vincoli,
definita positiva. La soluzione numerica non presenta difficolt
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
41
particolari, se non per il numero di incognite, spesso elevato.
Accorgimenti specifici, che sfruttano propriet del tutto
generali della matrice di rigidezza, consentono peraltro di
risolvere efficacemente sistemi di dimensioni anche molto
grandi.
2.6.2 LAPPROCCIO AGLI SPOSTAMENTI
2.6.2.1 Il modello cinematico
Consideriamo un elemento finito isolato dal contesto strutturale cui
appartiene. Al suo interno, gli spostamenti locali vengono
approssimati mediante polinomi di grado opportuno. Per la generica
componente di spostamento s
i
si scrive quindi, per domini
monodimensionali
( ) % + + + +
3
4
2
3 2 1 i
x a x a x a a x s 2.34)
Il modello di spostamento risulter tanto pi ricco quanto pi elevato
il grado del polinomio approssimante. In forma compatta, la (2.34) si
esprime
( ) ( )a x N x s
*
(2.35)
dove ( ) x s raccoglie le componenti di spostamento locale, la matrice
( ) x N
*
i monomi approssimanti e il vettore a i coefficienti
moltiplicativi.
Il legame deformazioni-spostamenti ( ) ( ) s x ! , dove ( ) indica
loperatore di congruenza per il problema in considerazione, permette
di risalire dalla (2.35) allandamento delle deformazioni
sullelemento. Simbolicamente si scrive
( ) ( )a x B x !
*
(2.36)
Il metodo richiede che i coefficienti a
i
dei polinomi approssimanti
siano sostituiti dagli spostamenti nodali u, vale a dire dai valori che gli
spostamenti locali assumono in corrispondenza degli r nodi
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
42
dellelemento. Indicando con x
j
le coordinate del nodo j, dalla (2.36)
si ottiene
( ) ( )a x N x s u
j * j j
( ) r , 1, j %
(2.37)
Le posizioni
'
!
!
j
u u ( )
1
1
1
]
1
!
!
j *
x N " (2.38)
permettono di scrivere compattamente la (2.37) come segue
"a u (2.39)
se la (2.39) invertibile, possibile esprimere i coefficienti del
polinomio in funzione degli spostamenti nodali scrivendo
u " a
1
(2.40)
Introducendo la (2.40) nelle (2.35)(2.36) si ottiene
( ) ( )u x N x s ( ) ( )u x B x ! (2.41a, b)
( ) ( )
1
*
" x N x N
( ) ( )
1
*
" x B x B
(2.42a, b)
Le componenti della matrice ( ) x N sono le funzioni di forma
dellelemento finito. Perch esse possano essere definite attraverso il
procedimento indicato occorre poter invertire la (2.39); unovvia
condizione che il numero di termini dei polinomi approssimanti
eguagli quello degli spostamenti nodali dellelemento. La matrice "
allora quadrata e, con leccezione di casi patologici legati a un cattivo
posizionamento dei nodi, risulta non-singolare.
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
43
Sulla base di quanto stato appena detto passiamo a determinare le
funzioni di forma per un elemento di trave, sotto le seguenti ipotesi:
1. legame -u lineare (ipotesi di piccoli spostamenti), in modo da
poter considerare i problemi assiali e flessionali disaccoppiati;
2. trave di Bernoulli-Eulero.
Problema assiale.
Modello di spostamento (lineare) (figura 2.14):
( )
'
1
]
1
,
_
+
2
1
2 1 x
a
a
l
x
1
l
x
a a x s ( )
'
1
]
1
2
1
2 x
a
a
l
1
0
l
1
a x !
E quindi
( )
1
]
1
l
x
1 x
*
N ( )
1
]
1
l
1
0 x
*
B
Gli spostamenti nodali sono i valori agli estremi e si esprimono
( )
1 1
a 0 u u ( )
2 1 2
a a l u u +
Figura 2.14
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
44
La matrice della trasformazione
1
]
1
1 1
0 1
"
e la sua inversa
1
]
1
1 1
0 1
1
"
Applicando le (2.42) risultano
( )
1
]
1
,
_
,
_
l
x
l
x
1 x N ( ) [ ] 1 1
l
1
x B
Problema flessionale.
Se le deformazioni taglianti vengono trascurate, la rotazione della
sezione si identifica con la derivata di w. Si ha allora
( ) ( ) x w x s ( ) ( )
2
2
dx
w d
x " x !
La congruenza peraltro richiede sempre la continuit delle rotazioni.
Perch questa condizione possa essere imposta in sede di
assemblaggio necessario che tra gli spostamenti nodali siano ancora
presenti quelli illustrati in figura 2.15. Lapprossimazione per w(x)
deve quindi contenere almeno quattro costanti. Il modello pi
semplice che soddisfi questi requisiti il polinomio di terzo grado
( )
3
3
4 2
2
3 2 1
l
x
a
l
x
a
l
x
a a x w + + +
Figura 2.15
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
45
Da esso si ottiene, per successive derivazioni
( ) ( )
,
_
+ +
2
2
4 3 2 x ,
l
x
3a
l
x
2a a
l
1
x w x
( ) ( )
,
_
+
l
x
6a 2a
l
1
x w x "
4 3 2 xx ,
( )
1
]
1
3
3
2
2
l
x
l
x
l
x
1 x
*
N ( )
1
]
1
3 2
l
6x
l
2
0 0 x
*
B
Gli spostamenti nodali ora si esprimono
( )
1 1
a 0 w u ( )
2 2
a
l
1
0 u ( )
4 3 2 1 3
a a a a l w u + + +
( )
4 3 2 4
3a 2a a
l
1
u + +
La matrice della trasformazione
1
1
1
1
1
1
1
1
]
1
l
3
l
2
l
1
0
1 1 1 1
0 0
l
1
0
0 0 0 1
#
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
46
e la sua inversa
1
1
1
1
]
1
l 2 l 2
l 3 2l 3
0 0 l 0
0 0 0 1
#
1
Applicando le (2.42) risultano
( )
1
]
1
,
_
,
_
,
_
,
_
+
3
3
2
2
3
3
2
2
3
3
2
2
3
3
2
2
2 3 2 2 3 1 x N
l
x
l
x
l
l
x
l
x
l
x
l
x
l
x
l
l
x
l
x
( )
1
]
1
,
_
,
_
+
,
_
,
_
l
x
6 2 l
l
x
12 6
l
x
6 4 l
l
x
12 6
l
1
x B
2
Figura 2.16
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
47
2.6.2.2 Forze nodali
Si consideri un generico elemento finito, come quello tratteggiato in
figura 2.17a e rappresentato isolatamente in figura 2.17b. Nel caso
generale, il suo contorno si presenta suddiviso in tre parti. La prima,
indicata con S
u
, appartiene alla superficie vincolata della struttura e su
di essa sono noti gli spostamenti. La seconda S
F
appartiene invece al
contorno caricato ed soggetta a trazioni superficiali f note. La terza
infine, indicata con , costituisce linterfaccia con gli elementi
adiacenti; su di essa non sono noti n gli spostamenti n le trazioni,
queste ultime costituite dalle componenti vettoriali
n
di sforzo sulla
giacitura identificata dalla normale uscente da . In un elemento
interno, completamente circondato da altri, il contorno
esclusivamente di questo tipo.
Si immagini di attribuire allelemento una variazione virtuale di
spostamento s ! , con conseguenti " ! . Indicando con F le forze di
volume e ricordando che 0 s ! su S
u
, i lavori virtuali esterno e interno
si scrivono
+ + d s dS s f dV s F
t
n
S
t
V
t
e
F
L LL L
V
t
i
dV L LL L (2.43a, b)
(le tensioni trasmesse dagli elementi adiacenti sono infatti viste
dallelemento isolato come carichi applicati). La condizione di
equilibrio per lelemento si ottiene imponendo luguaglianza tra le
(2.43) limitatamente alle variazioni virtuali compatibili con il modello
di spostamento.
Figura 2.17
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
48
Vale a dire, per ogni u e
u s N u B (2.44a, b)
In virt delle (2.44), le espressioni (2.43) dei lavori virtuali esterno e
interno divengono
( ) u p p u d fdS FdV
t
0
t
n
t
S
t
V
t
e
F
N N N +
'
+ +
L LL L (2.45)
u dV
t
V
t
i
B
'
L LL L (2.46)
Nella (2.45) si posto
d p
n
t
N
+
F
S
t
V
t
0
fdS FdV p N N (2.47a, b)
La condizione di equilibrio pertanto si esprime
0 u dV p p
t
V
t
0
'
B u (2.48)
e richiede lannullamento del termine in parentesi. Si ottiene
0
V
t
p dV p
B (2.49)
I vettori definiti dalle (2.47) sono noti come forze nodali e le loro
componenti sono le quantit statiche associate, attraverso il modello
cinematico, agli spostamenti nodali. In particolare, p
0
il vettore
(noto) delle forze nodali equivalenti ai carichi esterni applicati
sullelemento, mentre p rappresenta il contributo delle tensioni
allinterfaccia con gli elementi adiacenti.
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
49
Problema assiale
Consideriamo unasta soggetta ad un carico assiale distribuito n=cost.
In tal caso, la (2.47b) fornisce
( ) ( ) ( )
l
0
t
l
0
t
0
dx x n dx x n x p N N
dove N(x) sempre la matrice di forma che in questo caso pari a
( )
1
]
1
,
_
,
_
l
x
l
x
1 x N
quindi
'
'
1
1
2
nl
dx
x/l
x/l 1
n p
l
0
0
Le componenti di questi vettori sono forze dirette secondo lasse
dellelemento e applicate nei punti dove si collocano i corrispondenti
spostamenti nodali.
Problema flessionale
Consideriamo unasta soggetta ad un carico trasversale q=cost. In tal
caso, la (2.47b) fornisce
( ) ( ) ( )
l
0
t
l
0
t
0
dx x q dx x n x p N N
dove N(x) sempre la matrice di forma che in questo caso pari a
( )
1
]
1
,
_
,
_
,
_
,
_
+
3
3
2
2
3
3
2
2
3
3
2
2
3
3
2
2
l
x
l
x
l
l
x
2
l
x
3
l
x
l
x
2
l
x
l
l
x
2
l
x
3 1 x N
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
50
quindi
t
2 2 l
0
3
3
2
2
3
3
2
2
3
3
2
2
3
3
2
2
0
12
ql
2
ql
12
ql
2
ql
dx
l
x
l
x
l
l
x
2
l
x
3
l
x
l
x
2
l
x
l
l
x
2
l
x
3 1
q p
'
'
,
_
,
_
,
_
,
_
2.6.3 ANALISI ELASTICA
2.6.3.1 Propriet elastiche di un elemento finito
In questa fase viene introdotto il legame costitutivo, che nel caso
elastico lineare si esprime
( ) ! d " (2.50)
dove d la matrice (simmetrica e definita positiva) delle costanti
elastiche e il vettore delle deformazioni anelastiche o iniziali (ad
esempio termiche) eventualmente presenti.
Il legame puntuale (2.50) si traduce facilmente in una relazione che
governa il comportamento dellelemento finito in termini di variabili
nodali. Sostituendo la (2.41b) per e introducendo il risultato nella
(2.49), si ottiene infatti
( )
0
V
t
V
t
dV dV p d B u B d B p
'
1
]
1
(2.51)
La matrice simmetrica
V
t
dV B d B k (2.52)
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
51
nota come rigidezza elastica dellelemento finito. Il vettore
( )
V
t
dV
d B p (2.53)
definisce le forze nodali equivalenti a deformazioni e sforzi iniziali.
Con tali posizioni, la (2.51) si scrive
( )
p p ku p +
0
(2.54)
Problema assiale
Legame costitutivo, uniassiale
E
dx A dV dove A larea della sezione trasversale.
dx EA
t
l
0
B B k
( ) [ ] 1 1
l
1
x B
1
]
1
1 1
1 1
l
EA
k
Problema flessionale
Legame costitutivo, uniassiale
E
Elemento infinitesimo di volume dx dV .
V
t
dV B d B k con d=EJ
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
52
( )
1
]
1
3 2
l
6x
l
2
0 0 x
*
B
1
1
1
1
]
1
2 2
2 2
3
4l 6l 2l 6l
6l 12 6l 12
2l 6l 4l 6l
6l 12 6l 12
l
EJ
k
La matrice di rigidezza dellelemento finito di trave, nel sistema locale
pertanto:
1
1
1
1
1
1
1
1
1
1
1
1
1
]
1
l
EJ 4
l
EJ 6
0
l
EJ 2
l
EJ 6
0
l
EJ 6
l
EJ 12
0
l
EJ 6
l
EJ 12
0
0 0
l
EA
0 0
l
EA
l
EJ 2
l
EJ 6
0
l
EJ 4
l
EJ 6
0
l
EJ 6
l
EJ 12
0
l
EJ 6
l
EJ 12
0
0 0
l
EA
0 0
l
EA
2 2
2 3 2 3
2 2
2 3 2 3
k
2.6.3.2 Cambiamento di riferimento
Motivi di convenienza suggeriscono spesso di formulare il modello di
spostamento in coordinate locali. Ad esempio, lasse x
spontaneamente identificato con la linea media di un elemento
monodimensionale. I riferimenti locali dei vari elementi che
costituiscono la struttura si presentano in generale diversamente
orientati, di modo che gli spostamenti nodali non risultano
sovrapponibili.
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
53
In vista della successiva operazione di assemblaggio, opportuno
trasformare le componenti u
L
di spostamento nodale nel riferimento
locale x nelle componenti u rispetto a un riferimento globale X,
comune a tutti gli elementi. La legge di trasformazione si esprime
simbolicamente come segue
u T u
L
(2.55)
Le componenti di T dipendono dallangolo tra i due riferimenti. Se in
ogni nodo j le componenti di spostamento locale e globale sono
numerate consecutivamente, tale matrice si presenta diagonale a
blocchi. Precisamente
( ) t
t 0
0 t
T diag
1
]
1
dove la sottomatrice t governa la trasformazione delle componenti di
spostamento relative al j-simo nodo. Se indichiamo con
linclinazione della linea dasse rispetto al sistema di riferimento
globale, possiamo scrivere
1
1
1
]
1
1 0 0
0 cos sen -
0 sen cos
t
e quindi
1
1
1
1
1
1
1
1
]
1
1 0 0 0 0 0
0 cos sen - 0 0 0
0 sen cos 0 0 0
0 0 0 1 0 0
0 0 0 0 cos sen -
0 0 0 0 sen cos
T
che viene chiamata matrice di rotazione.
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
54
La (2.54) era stata determinata supponendo che il sistema di
riferimento era unico. Le fasi per passare ad un sistema di riferimento
globale, sono:
( )
L 0
V
t
L
V
t
L
dV dV p d B u B d B p
'
1
]
1
dove:
G L
p T p
G L
u T u
G 0 L 0
p T p
quindi
( )
G 0
V
t
G
V
t
G
dV dV p T d B u T B d B p T
'
1
]
1
moltiplicando ambo i membri per T
-1
, si ottiene
( )
G 0
1
V
t 1
G
V
t 1
G
1
dV dV p T T d B T u T B d B T p T T
'
1
]
1
( )
G 0
V
t 1
G
V
t 1
G
dV dV p d B T u T B d B T p
'
1
]
1
inoltre
V
t
L
dV B d B k e ( )
V
t
L
dV
d B p
pertanto
G 0 L
1
G L
1
G
p p T u T k T p
Essendo la matrice di rotazione una matrice ortogonale, la sua inversa
uguale alla sua trasposta
T 1
T T
G 0 L
T
G L
T
G
p p T u T k T p
G 0 L
T
G G G
p p T u k p
( )
L
T
G 0 G G G
p T p u k p + (2.56)
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
55
2.6.3.3 Assemblaggio
In questa fase si crea la matrice di rigidezza di tutta la struttura, come
somma delle matrici locali, riferite al sistema di riferimento globale,
dei singoli elementi e:
( )
e
T
e 0 e e
p T p U k p + N 1 e , ,!
( )
+
N
1 e
e
T
e 0
N
1 e
e
N
1 e
e
p T p U k p (2.57)
Ponendo
N
1 e
e
k K ( )
+
N
1 e
e
T
e 0
p T p P
La (2.57) si scrive
P U K (2.58)
C da dire che la matrice K e le matrici k
e
hanno dimensioni diverse.
Questultime vanno collocate in K nelle posizioni corrette, in modo
che le componenti di spostamento dei singoli elementi vengono
identificate con le corrispondenti nella struttura assemblata.
2.6.3.4 Vincoli e spostamenti assegnati
La matrice di rigidezza K stata assemblata ignorando i vincoli, essa
quindi non definita positiva, in quanto sono presenti modi rigidi. Per
eliminare questi modi occorre imporre i vincoli, andando a modificare
la matrice di rigidezza K e il vettore dei carichi P.
Il vettore degli spostamenti nodali decomponibile in due parti, il
sottovettore U
*
che raccoglie le M componenti libere e il sottovettore
U
0
che contiene quelle di valore assegnato. Al primo corrisponde il
vettore delle forze nodali P
*
, note, mentre la parte associata a U
0
costituita dalle reazioni vincolari R. Simbolicamente si scrive
'
'
1
]
1
R
P
U
U
K K
K K
* *
*
* *
0 00
T
0
0
(2.59)
o anche, sviluppando i prodotti matriciali e riordinando i termini
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
56
0 0
U K P U K
* * * *
0 00
T
0
U K U K R
* *
+ (2.60a, b)
La (2.60a) consente il calcolo degli spostamenti liberi U
*
, che vi
compaiono come uniche incognite. Una volta valutato U
*
, le reazioni
vincolari possono essere calcolate sostituendolo nella (2.60b).
2.6.4 EFFETTI DEL SECONDO ORDINE (non-linearit
geometriche)
2.6.4.1 Approccio energetico
Consideriamo un elemento monodimensionale privo di carichi
distribuiti, sia trasversali che assiali e scriviamo per esso il funzionale
energia potenziale totale:
[ ] { }
+
l
2 2
2
1
dx EJ# EA" u $ (2.61)
la deformazione al 2 ordine e la curvatura sono
2
x 2
1
x 0
w u
, ,
+ +
xx
w
,
(2.62)
che sostituite nella (2.61) danno
[ ] ( ) { }
+ + +
l
2
xx
2
2
x 2
1
x 0 2
1
dx w EJ w u EA u $
, , ,
( ) { }
+ + + + + +
l
2
xx
2
x x
2
x 0 x 0
4
x 4
1
2
x
2
0 2
1
dx w EJ w u w u 2 w u EA
, , , , , , ,
[ ]
+ + + +
l
x 0
l
4
x 8
1
l
2
x 2
1
l
2
0 2
1
dx u EA dx w EA dx u EA dx EA u $
, , ,
+ + +
l
2
xx 2
1
l
2
x x 2
1
l
2
x 0 2
1
dx w EJ dx w u EA dx w EA
, , , ,
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
57
Ponendo
0 0
EA" N , si ha:
[ ]
+ +
l
x 0
l
0 0 2
1
dx u N dx N u $
,
{ }
+ + + + +
l
2
xx
2
x x
4
x 4
1
2
x 0
2
x 2
1
dx w EJ w u A E w EA w N u EA
, , , , , ,
[ ] { } + + + + +
l
2
xx
2
x 0
2
x 2
1
l
x 0
l
0 0 2
1
dx w EJ w N u EA dx u N dx N u $
, , , ,
+ +
l
4
x 24
1
l
2
x x 6
1
dx w A E 3 dx w u A E 3
, , ,
Lo sviluppo in serie di Taylor di [ ] u $ nella configurazione 0
[ ] [ ] [ ] [ ] [ ] [ ] u $ u $ u $ u $ u $ u $
' ' ' '
0 24
1
' ' '
0 6
1
' '
0 2
1
'
0 0
+ + + +
dove
[ ]
l
0 0 2
1
0
dx N u $
[ ]
l
x 0
'
0
dx u N u $
,
[ ] { }
+ +
l
2
xx
2
x 0
2
x 2
1
' '
0 2
1
dx w EJ w N u EA u $
, , ,
[ ]
l
2
x x 6
1
' ' '
0 6
1
dx w u A E 3 u $
, ,
[ ]
l
4
x 24
1
' ' ' '
0 24
1
dx w A E 3 u $
,
I termini [ ] u $
0
e [ ] u $
'
0
sono nulli perch partiamo da una
configurazione indeformata, lenergia di deformazione pertanto pari,
trascurando, inoltre, i termini di grado superiore al secondo, a
[ ] [ ] { }
+ +
l
2
xx
2
x 0
2
x 2
1
' '
0 2
1
dx w EJ w N u EA u $ u $
, , ,
[ ] [ ]
+ +
l
2
x 0 2
1
l
2
xx 2
1
l
2
x 2
1
' '
0 2
1
dx w N dx w EJ dx u EA u $ u $
, , ,
(2.63)
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
58
Poniamo H p N
0
(figura 2.18) , con Hsempre positivo se di
compressione e la (2.63) diventa
[ ] [ ]
+
l
2
x 2
1
l
2
xx 2
1
l
2
x 2
1
' '
0 2
1
dx w H p dx w EJ dx u EA u $ u $
, , ,
(2.64)
Se sostituiamo nella (2.64) le funzioni di forma determinate
precedentemente e cio
( ) ( ) x a
l
x
a
l
x
1 x u
a
t
2 1
N a +
,
_
( ) +
,
_
+ +
,
_
+
2
3
3
2
2
1
3
3
2
2
f
l
x
l
x
2
l
x
l f
l
x
2
l
x
3 1 x w
( ) x f
l
x
l
x
l f
l
x
2
l
x
3
f
t
4
3
3
2
2
3
3
3
2
2
N f
,
_
+ +
,
_
+
ed eseguendo derivazioni e integrazioni, la (2.64) diventa
[ ] [ ] ( ) ( )u k k u f k k f a k a
Gf Ef
t
2
1
Gf Ef
t
2
1
a
t
2
1
' '
0 2
1
p p u $ u $ +
Figura 2.18
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
59
dove si posto
1
]
1
1 1
1 1
l
EA
dx EA
l
0
t
a a a
' '
N N k
1
1
1
1
]
1
2 2
2 2
3
l
0
t
f f Ef
4l 6l 2l 6l
6l 12 6l 12
2l 6l 4l 6l
6l 12 6l 12
l
EJ
dx EJ
' ' ' '
N N k
1
1
1
1
]
1
2 2
2 2 l
0
t
f f Gf
4l 3l l - 3l
3l 36 3l 6 3
l - 3l 4l 3l
3l 6 3 3l 36
l 30
H
dx H
' '
N N k
1
]
1
Ef
a
E
0
0
k
k
k
1
]
1
Gf
G
0
0 0
k
k (2.65a, b)
Le (2.65) definiscono le matrici di rigidezza elastica e geometrica
dellelemento di trave. La prima congloba i contributi assiali e
flessionali, che si presentano disaccoppiati, e coincide con
lespressione ottenuta precedentemente (2.6.3.1) operando in piccoli
spostamenti. La (2.65b) incorpora gli effetti dellazione assiale sulla
rigidezza, che diminuisce in elementi compressi ( ) 0 H > . Questi effetti
intervengono solo attraverso lo spostamento trasversale, cio per
w(x)0.
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
60
2.6.4.2 Lo studio dei ponti strallati in regime elastico con il metodo
degli elementi finiti tenendo conto degli effetti del secondo
ordine.
Un ponte strallato una struttura che, a rigore, andrebbe studiata in
campo non lineare. Come stato gi detto precedentemente per una
fune la soluzione in campo lineare non esiste, sembrerebbe ovvio che
lanalisi andrebbe condotta considerando anche le non linearit
geometriche.
Lutilizzo del modulo di elasticit di DISCHINGER ci permette di
condurre lanalisi in ambito lineare, senza commettere grossi errori se
le non linearit sono modeste, non-linearit che possono essere messe
in relazione con il rapporto q/g % fra i carichi accidentali e i carichi
permanenti. Se questo rapporto basso ( 30 0 20 0 % . . per ponti con
impalcati in calcestruzzo) la divergenza dalla linearit moderata, se
viceversa il rapporto alto ( 00 2 00 1 % . . per ponti con impalcato in
acciaio) il modulo di DISCHINGER ci porta a commettere grossi
errori, almeno quello tangente, il modulo secante, anche se
formalmente pi corretto, non sembrerebbe di facile ricerca in quanto
occorre utilizzare un procedimento iterativo che potrebbe anche non
convergere, inoltre lapprossimazione alla curva
*
molto
grossolana.
Lutilizzo del metodo degli elementi finiti e della matrice geometrica
K
G
ci permettono di scavalcare questi problemi, in quanto la matrice
di rigidezza viene aggiornata ad ogni passo o iterazione per tener
conto dellirrigidimento dei cavi dovuto agli sforzi di trazione.
Si pone il problema dellavvio del processo iterativo, in quanto,
essendo nulli gli sforzi normali negli stralli, nulla per tali elementi la
matrice geometrica del primo passo di calcolo. Solitamente, per
innescare il procedimento, si attribuisce un valore iniziale di
pretensione alle funi oppure si applica il peso proprio alle funi dopo
aver applicato alla travata una parte del carico, di modo che le funi
ricevono il peso proprio quando hanno gi una conveniente
pretensione. Tale calcolo non ha, per, alcun interesse pratico perch
al fine di limitare le frecce dellimpalcato, gli stralli devono essere
convenientemente pretesi. Tuttavia tale calcolo fornisce utili
indicazioni per definire lentit delle pretensioni necessarie per
limitare adeguatamente linflessione della travata.
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
61
C da dire, inoltre, che gli sforzi complessivi negli stralli non sono
influenzati, in misura apprezzabile, dai valori iniziali delle pretrazioni.
Per poter effettuare lanalisi non-lineare , in genere, necessario fare
ricorso a metodi di calcolo iterativi. Per tali metodi lo schema di
calcolo si articola nelle seguenti fasi:
1. Con i carichi assegnati si svolge il calcolo della struttura con la
teoria del 1 ordine; vale a dire considerare nulla la matrice di
rigidezza geometrica di ciascuna asta. Si determinano in tale
modo i valori degli sforzi normali { }
1
N .
2. Si ricalcolano le matrici delle rigidezze delle varie aste,
valutando i coefficienti di rigidezza delle matrici geometriche
con i valori degli sforzi normali { }
1
N .
3. Si risolve nuovamente la struttura con gli stessi carichi
assegnati e si calcolano gli sforzi normali, in generale diversi
da quelli ottenuti con il primo calcolo. Sia { }
2
N linsieme dei
valori cos calcolati.
4. Si aggiornano nuovamente i valori dei coefficienti della
matrice di rigidezza geometrica.
5. Si ripercorre il calcolo descritto al passo 3, e cos di seguito.
Sintende che il calcolo si arresta quando gli sforzi normali calcolati al
passo i sono poco dissimili da quelli calcolati al passo i+1.
Lonere di calcolo, ovvero il numero delle iterazioni, dipende dal
criterio di convergenza adottato e dal grado di approssimazione che si
intende raggiungere.
Esistono vari criteri di convergenza, fra questi il pi ricorrente
consiste nel verificare, ad ogni iterazione, che:
{ }
{ }
2
i
2
i
N
N
100
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
62
dove:
lerrore percentuale massimo ammesso,
{ }
i
N la differenza fra i valori degli sforzi normali
calcolati al passo i-1 e quelli calcolati al passo i.
{ }
2
i
N { }
2
i
N sono le norme euclidee.
C da osservare che un criterio di convergenza analogo al precedente
potrebbe essere applicato sul vettore degli spostamenti nodali.
Metodi risolutivi per problemi non-lineari:
il metodo di Newton-Raphson.
E un metodo iterativo molto semplice, che permette di risolvere
problemi non-lineari, sia di natura geometrica che del materiale.
Consideriamo il seguente sistema di equazioni non-lineari
( ) U # P (2.66)
che possiamo equivalentemente scrivere come
( ) ( ) 0 P U # U $ (2.67)
dove P e U indicano i vettori delle forze e degli spostamenti nodali.
Supponiamo che le componenti di siano funzioni differenziabili in
U, supponiamo, inoltre, di conoscere una soluzione approssimata U
n
della (2.67). Sviluppando la (2.67) in serie di Taylor attorno a U
n
e
troncando al termine del primo ordine si ottiene
( ) ( ) { } 0 U U
U
$
U $ U $
1
]
1
+
+ + n 1 n
U
n 1 n
n
(2.68)
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
63
La (2.68) rappresenta un sistema lineare che consente il calcolo di un
valore aggiornato U
n+1
per gli spostamenti nodali e si configura come
elemento di un processo iterativo per la soluzione della (2.67).
Introduciamo la seguente matrice
( )
1
]
1
1
]
1
U
%
U
$
U K
T
j
i
j
i
Tij
U U
K
(2.69)
La matrice K
T
(U) altro non che la matrice tangente a nel punto U.
Per semplificare la scrittura delle relazioni successive poniamo
( )
n n
U % % ( )
n n
U $ $ ( )
n
T
n
T
U K K (2.70a, b, c)
n 1 n n
U U &U
+
(2.71)
La (2.68) si scrive, simbolicamente
( ) ( ) ( )
n
1
n
T
n
1
n
T
n
% P K $ K &U
n n 1 n
&U U U +
+
(2.72a, b)
Il processo viene iterato aggiornando ogni volta le (2.69) e le (2.70) e
termina (figura 2.19a) quando il vettore
P % $
n n
(2.73)
diviene sufficientemente piccolo. Vale a dire, quando risulta
<
n
$ (2.74)
dove
n
$ unopportuna norma del vettore (tipicamente, il suo
modulo o il massimo valore assoluto delle sue componenti) e
unassegnata tolleranza. Gli spostamenti nodali (2.72b) rappresentano
allora la soluzione della (2.66), a meno di un errore controllato da .
Lapplicazione del metodo di Newton-Raphson nella sua veste
originale pu rivelarsi onerosa in quanto ogni iterazione richiede di
ridefinire la matrice dei coefficienti
n
T
K e quindi di risolvere un
diverso sistema di equazioni lineari. Ci pu essere evitato ricorrendo
ad una versione modificata del metodo (figura 2.19b), che consiste
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
64
semplicemente nellassumere, indipendentemente dalliterazione
corrente
0
T
n
T
K K (2.75)
per cui la (2.72a) diventa
( ) ( )
n
1
0
T
n
% P K &U
(2.76)
In questo modo ad ogni iterazione si aggiorna solamente il vettore dei
termini noti e non si decompone la matrice
n
T
K , aumenta per il
numero delle iterazioni.
La convergenza del metodo di Newton-Raphson non garantita in
ogni circostanza, come vedremo in seguito, ma normalmente si
verifica se il vettore di partenza non molto discosto dalla soluzione.
Figura 2.19
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
65
Metodi risolutivi per problemi non-lineari:
metodo di calcolo incrementale.
Il problema pu essere risolto oltre che con dei metodi iterativi anche
con dei metodi incrementali, in cui si pu osservare il comportamento
della struttura man mano che viene caricata.
Supponiamo di conoscere le equazioni di equilibrio nellincognita
[ ] F L (2.77)
Sia inoltre
0
la configurazione nota relativa allo stato iniziale A.
Se, anzich applicare i carichi complessivi, si suppone di effettuare un
caricamento progressivo con incrementi di carico F sufficientemente
piccoli, lecito ritenere che per il primo incremento di carico la
struttura passi dallo stato iniziale A allo stato A+A sufficientemente
vicino a quello iniziale e definito da una piccola variazione del
movimento.
Sviluppiamo in serie di Taylor la (2.77)
[ ] [ ] F R
d
dL
L L
A
0 0
+
,
_
+ +
(2.78)
dove R il resto, trascurabile se
2
trascurabile rispetto a .
In questo modo linearizziamo il problema e lequazione da risolvere
diventa
[ ] F
d
dL
L
A
0
,
_
+
(2.79)
Risolta il sistema di equazioni lineari (2.79) il passo successivo
consiste, ovviamente, nellapplicare un nuovo incremento di carico e
ripetere il procedimento assumendo per come configurazione iniziale
della struttura quella, nota, ottenuta al termine del primo passo.
Nel nostro caso alla fine di ogni passo dobbiamo aggiornare la matrice
di rigidezza geometrica della struttura .
Ovviamente ad ogni passo si commette un errore che si somma a
quelli dei passi precedenti e di cui difficile stimarne lentit.
Il procedimento di calcolo si arresta quando si raggiunto lultimo
incremento di carico { }
2
F ed allora evidente che i movimenti e le
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
66
azioni interne complessive sono dati dalle seguenti relazioni:
{ } { } { } { }
n 2 1
+ + + ! (2.80)
{ } { } { } { }
n 2 1
S S S S + + + ! (2.81)
La soluzione di un problema non-lineare viene cos trasformata nella
ripetuta soluzione di problemi lineari (figura 2.20).
Metodi risolutivi per problemi non-lineari:
il metodo incrementale-iterativo di Newton-Raphson.
Con tale metodo si evitano i problemi di convergenza del metodo di
Newton-Raphson descritto precedentemente. Si tratta, in parole
povere, del metodo incrementale in cui si innesta, ad ogni passo, il
metodo di Newton Raphson classico o modificato (figura 2.21a, b).
Figura 2.20
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
67
Il metodo descritto, sia nella forma originale, sia in quella modificata,
in genere molto valido per lanalisi di strutture che presentano
legami carico-spostamenti del tipo di figura 2.21, ossia con
abbattimento della rigidezza della struttura al crescere del carico. Nel
caso dellanalisi di un ponte strallato, ma in generale di qualunque
struttura realizzata con sistemi di funi, il legame carico spostamenti,
per gli stralli, del tipo di figura 2.22. Se la rigidezza iniziale della
struttura molto minore di quella che la stessa struttura raggiunge
quando sottoposta a carichi di qualche rilevanza si possono avere
problemi di convergenza. Tali problemi possono essere evitati
innescando il calcolo con incrementi iniziali di carico relativamente
piccoli. La figura 2.22 mostra, infatti, che la prima forza non
equilibrata risulta negativa, e di intensit paragonabile a
1
F , se il
primo incremento di carico non sufficientemente piccolo.
Il problema, che molto insidioso, pu anche essere evitato iniziando
il calcolo non con la matrice tangente ma con una matrice secante.
Figura 2.21
(a) (b)
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
68
Osservazioni sul concetto di matrice di rigidezza tangente nel
riferimento generale.
Per un asta, facente parte di una struttura, lespressione che lega, in un
generico stato A nel sistema di riferimento generale, le variazioni
delle azioni { } S alle variazioni dei movimenti { }
{ } [ ] { } !& K !S
A t
(2.82)
dove [ ]
A t
K la matrice di rigidezza tangente dellasta nel riferimento
generale. Le variazioni { } !S sono legate alle variazioni { } S ! , nel
sistema locale, dalla seguente espressione:
{ } [ ] { } [ ] { }
A
T
A
T
A
S R S ! R !S + (2.83)
Figura 2.22
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
69
Nella (2.83) compare la variazione della matrice di rotazione in
quanto tale trasformazione dipende dagli stessi valori di { } e quindi
dalle loro variazioni.
Nel sistema di riferimento locale possiamo scrivere
{ } [ ] { } & ! K S !
A t
(2.84)
che sostituita nella (2.83) fornisce:
{ } [ ] [ ] { } [ ] { }
A
T
A A t
T
A
S R & ! K R !S + (2.85)
ma
{ } [ ] { } !& R & !
A
(2.86)
sostituendo la (2.86) nella (2.85) si ottiene
{ } [ ] [ ] [ ] { } [ ] [ ] { }
A A
T
A A A t
T
A
S R R !& R K R !S + (2.87)
La (2.87) mostra che le variazione delle azioni { } S legata alla
variazione dei movimenti { } & da due trasformazioni. La prima fornisce
la variazione delle azioni { } S a seguito delle variazioni dei movimenti
{ } & , quindi a seguito dellinsorgere di deformazioni nellasta. La
seconda trasformazione trae origine essenzialmente dalla circostanza
che le azioni { } S affioranti allestremit dellasta nello stato A
cambiano direzione rispetto al riferimento locale a seguito delle
variazioni di movimenti { } & .
Il metodo iterativo di Newton-Raphson converge, come abbiamo
visto, anche se si utilizza una matrice diversa da quella tangente,
quindi la parte finale della (2.87) pu venire trascurata.
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
70
Osservazioni sul metodo incrementale-iterativo di
Newton-Raphson.
Abbiamo detto precedentemente che il metodo di Newton-Raphson
nella sua veste modificata meno oneroso, dal punto di vista
computazionele, del metodo nella sua forma originale, in quanto si va
ad operare una sola volta sulla matrice di rigidezza. Alcune volte,
per, il numero delle iterazioni aumenta a tal punto da rendere nullo il
vantaggio di iterare sempre con la stessa matrice (figura 2.23a). E
opportuno, quando le iterazioni diventano elevate, calcolare la matrice
tangente alla fine del passo e continuare con questultima literazione
(figura 2.23b).
(a) (b)
Figura 2.23
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
71
Valutazione Approssimata degli effetti del secondo ordine: il
metodo dei tagli fittizi (effetto P- ).
Il metodo iterativo e molto semplice ed offre il vantaggio di operare
soltanto sulla matrice di rigidezza elastica [ ]
E
K della struttura. Tale
metodo di solito usato per tener conto, in qualche modo, degli effetti
del secondo ordine nelle strutture intelaiate degli edifici. Sembrerebbe
non adatto allanalisi dei sistemi di funi, ma viene utilizzato in molti
codici di calcolo, tra cui anche quello che abbiamo utilizzato per
lanalisi elastica e dinamica del nostro ponte strallato asimmetrico.
Il sistema di equazioni risolventi il problema :
Lu F Ku + dove L una
matrice che contiene solo
termini
i i
h w / (tagli fittizi).
L K K
*
con K
*
non
simmetrica.
Si eseguono ripetuti calcoli
elastici fintanto che la
differenza fra i tagli fittizi di
due successive iterazioni
piccola.
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
72
2.6.5 EFFETTI DEI TRATTI RIGIDI
Le matrici di rigidezza determinate precedentemente sono valide
nellipotesi che le dimensioni delle sezioni siano trascurabili rispetto
alla lunghezza degli elementi. Se le dimensioni non sono trascurabili
lipotesi di nodo puntiforme non pu essere accettata. In questi casi si
pu operare inserendo allestremit degli elementi dei tratti rigidi di
lunghezza opportuna (figura 2.24) .
Le matrici di rigidezza del nuovo elemento assumeranno, quindi, una
forma diversa da quelle viste precedentemente:
1
1
1
1
1
1
1
1
1
1
1
1
1
]
1
2 1 2 1 2
1 2 3 1 2 3
1
2
2 1
2
1 2 3 1 2 3
D
l
EJ 4
D
l
EJ 6
0 B
l
EJ 2
D
l
EJ 6
0
D
l
EJ 6
l
EJ 12
0 C
l
EJ 6
l
EJ 12
0
0 0
l
EA
0 0
l
EA
B
l
EJ 2
C
l
EJ 6
0 C
l
EJ 4
C
l
EJ 6
0
D
l
EJ 6
l
EJ 12
0 C
l
EJ 6
l
EJ 12
0
0 0
l
EA
0 0
l
EA
k
dove:
l
c
2 1 C
1
+
,
_
+
l
c
1
l
c
3 C
2
l
d
2 1 D
1
+
,
_
+
l
d
1
l
d
3 D
2
,
_
+ +
,
_
+
l
c
1
l
d
3
l
d
1
l
c
3 B
Figura 2.24
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
73
2.6.6 EFFETTO DELLA DEFORMABILITA TAGLIANTE
La matrice di rigidezza determinata in 2.6.3.1 riferita alla trave di
Eulero-Bernoulli, non tiene conto, quindi, della deformabilit
tagliante. Questa pu essere introdotta in due modi:
1. tramite coefficienti correttivi;
2. ricalcolando la matrice di rigidezza tenento conto anche degli
scorrimenti angolari.
Tramite coefficienti correttivi.
( ) ( )
( ) ( )
1
1
1
1
1
1
1
1
1
1
1
1
1
]
1
+ +
+ +
2 2 1 2 1 1 2
1 2 3 1 2 3
1 1 2 2 2 1 2
1 2 3 1 2 3
' D (
l
4EJ
(D
l
6EJ
0 ' B (
l
2EJ
(D
l
6EJ
0
(D
l
6EJ
(
l
12EJ
0 (C
l
6EJ
(
l
12EJ
0
0 0
l
EA
0 0
l
EA
' B (
l
2EJ
(C
l
6EJ
0 ' C (
l
4EJ
(C
l
6EJ
0
(D
l
6EJ
(
l
12EJ
0 (C
l
6EJ
(
l
12EJ
0
0 0
l
EA
0 0
l
EA
k
con
1 2&
1
(
+
& 1 '
1
2
&
1 '
2
+
GA
#
l
6EJ
&
2
e dove C
1
C
2
D
1
D
2
B sono i coefficienti che tengono
conto dei tratti rigidi.
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
74
Ricalcolando la matrice di rigidezza tenento conto anche degli
scorrimenti angolari.
La trave quella di Timoshenko, il problema , quindi, governato da
due componenti di spostamento e deformazioni. Precisamente
( )
( )
( )
'
x
x w
x s ( )
( )
( )
;
'
1
]
1
'
w
1 d/dx
d/dx 0
x t
x #
x !
dove w lo spostamento trasversale della linea media e la
rotazione della sezione, mentre e t indicano, rispettivamente, la
curvatura flessionale e lo scorrimento medio.
Usando unapprossimazione lineare per entrambe le componenti di
spostamento, si ha:
( )
l
x
a a x w
2 1
+ ( )
,
_
+
l
x
b b
l
1
x
2 1
da cui si ottiene
( )
2 2
b
l
1
x # ( )
,
_
l
x
b b a
l
1
x t
2 1 2
e quindi:
( )
1
]
1
x 0 x l 0
0 x 0 x l
l
1
x N ( )
1
]
1
x 1 x l 1
1 0 1 0
l
1
x B
l
0
dx B d B k
t
1
]
1
*
d
GA 0
0 EJ
1
1
1
1
]
1
+
1
1
1
1
1
1
1
1
1
]
1
1 0 1 0
0 0 0 0
1 0 1 0
0 0 0 0
l
EL
3
l
2
l
6
l
2
l
2
l
1
2
l
1
6
l
2
l
3
l
2
l
2
l
1
2
l
1
l
GA
2 2
2 2
*
k
Analisi Statica
Capalbo Cataldo - the.wayne@tiscalinet.it - FAX 1782208102
75
BIBLIOGRAFIA
[1] Troitsky M.S., Cable-stayed Bridges, Theory and Design, Crosby
Lockwood Staples, London, 1977.
[2] Walther R., Cable stayed bridges, Thomas Telford, London, 1999.
[3] Gimsing N.J., Cable Supported Bridges, Concept & Design, John
Wiley & Sons, Chichester, 1996.
[4] Petrangeli M.P., Progettazione e costruzione di ponti, Masson,
Milano, 1998.
[5] De Miranda F., I ponti strallati di grande luce, Ed. Scientifiche A.
Cremonese, Roma, 1980.
[6] Majowiecki M., Tensostrutture: Progetto e verifica, Edizioni
CREA, Genova, 1994.
[7] Corradi DellAcqua L., Meccanica delle strutture, la valutazione
della capacit portante, McGraw-Hill, Milano, 1994.
[8] Corradi DellAcqua L., Meccanica delle strutture, le teorie
strutturali e il metodo degli elementi finiti, McGraw-Hill, Milano,
1994.
[9] Capalbo C., Appunti di Scienza delle Costruzioni, Rende, 1996.
[10] Pozzati P., Ceccoli C., Teoria e tecnica delle strutture, UTET,
Torino, 1995.
[11] SAP2000, Geometric stiffness and P-Delta effects, Computers
and Structures Inc., Berkeley, California, 1999.
You might also like
- Domini di resistenza in pressoflessione deviata per sezioni in c.a.: procedura parametrica per il tracciamento e confronti con formulazioni semplificateFrom EverandDomini di resistenza in pressoflessione deviata per sezioni in c.a.: procedura parametrica per il tracciamento e confronti con formulazioni semplificateNo ratings yet
- Ponti Strallati1Document75 pagesPonti Strallati1pierluciolabella100% (1)
- MagliuloDocument52 pagesMagliulobosnia76No ratings yet
- Strutture Miste PDFDocument55 pagesStrutture Miste PDFriccecriNo ratings yet
- WWW - Stru.polimi - It - Home - Malerba - Bacheca - PONTI A.A. 2011-12-2 NORME CARICHI SUI PONTI-1Document21 pagesWWW - Stru.polimi - It - Home - Malerba - Bacheca - PONTI A.A. 2011-12-2 NORME CARICHI SUI PONTI-1RO Man100% (1)
- I Ponti Ad ArcoDocument48 pagesI Ponti Ad ArcoLuigi CampolongoNo ratings yet
- Assobeton Progettazione Sismica Strutture PrefabbricateDocument90 pagesAssobeton Progettazione Sismica Strutture Prefabbricatepulcino_mannaro100% (1)
- Strutture Antisismiche in Acciaio PDFDocument126 pagesStrutture Antisismiche in Acciaio PDFGiuseppe GentileNo ratings yet
- Tecnica Costruzioni 14Document3 pagesTecnica Costruzioni 14Domenico GuadalupiNo ratings yet
- Lastre Alveolari in CapDocument236 pagesLastre Alveolari in CapGiuseppe Casciano50% (2)
- Progetto Con Modelli Tirante-PuntoneDocument102 pagesProgetto Con Modelli Tirante-PuntoneGiuseppe GentileNo ratings yet
- ManualeMeccanica Terre Abstract PDFDocument37 pagesManualeMeccanica Terre Abstract PDFValter FerrariNo ratings yet
- C.A.P. Isaia ClementeDocument70 pagesC.A.P. Isaia ClementeAntonio BevilacquaNo ratings yet
- Giangreco PDFDocument298 pagesGiangreco PDFFrancesco MontagnoliNo ratings yet
- Linee Di Influenza 2 PDFDocument8 pagesLinee Di Influenza 2 PDFShadiNo ratings yet
- Urti BarriereDocument32 pagesUrti BarriereAngela ScottNo ratings yet
- L'Analisi Statica Non Lineare (Push-Over) Delle Strutture in Cemento ArmatoDocument10 pagesL'Analisi Statica Non Lineare (Push-Over) Delle Strutture in Cemento ArmatoginoNo ratings yet
- Analisi Lineare e Non Lineare PontiDocument61 pagesAnalisi Lineare e Non Lineare PontilamuNo ratings yet
- 10 Costruzione Di Ponti 2007-08 Rev0Document22 pages10 Costruzione Di Ponti 2007-08 Rev0GuillaumeHNONo ratings yet
- Vulnerabilità Ponti MuraturaDocument135 pagesVulnerabilità Ponti MuraturaFouad KehilaNo ratings yet
- Ponti Strallati - Atti Cenni Storici PARTE IIDocument124 pagesPonti Strallati - Atti Cenni Storici PARTE IIandy0% (1)
- 05 Costruzione Di Ponti 2008-09 Rev.2Document57 pages05 Costruzione Di Ponti 2008-09 Rev.2GuillaumeHNONo ratings yet
- Teoria e Progetto Di Travi Da Ponte ComposteDocument34 pagesTeoria e Progetto Di Travi Da Ponte CompostepierpaolorossiNo ratings yet
- Lezione 16b (Esempio Guyon-Massonnet-Bares)Document47 pagesLezione 16b (Esempio Guyon-Massonnet-Bares)Fabrizio BisernaNo ratings yet
- Allegato Guida Semplificata Verifica PontiDocument78 pagesAllegato Guida Semplificata Verifica PontiMaria Chiara CimminoNo ratings yet
- 4 Emme Collaudo PontiDocument34 pages4 Emme Collaudo PontiCarloDoimoNo ratings yet
- 04 2018.06.04 Maurizio Orlando (Edifici Esistenti) PDFDocument96 pages04 2018.06.04 Maurizio Orlando (Edifici Esistenti) PDFAlket DhamiNo ratings yet
- Isolamento Sismico Di Edi Ci Semplici in Muratura Mediante Isolatori in Gomma Fibrorinforzata Non Confi NataDocument137 pagesIsolamento Sismico Di Edi Ci Semplici in Muratura Mediante Isolatori in Gomma Fibrorinforzata Non Confi NataStefano FolladorNo ratings yet
- ViabilitaDocument50 pagesViabilitaalegrittiNo ratings yet
- Criteri Di Base Della Progettazione SismicaDocument58 pagesCriteri Di Base Della Progettazione SismicaGiuseppe GentileNo ratings yet
- Progettare Strutture in CADocument186 pagesProgettare Strutture in CAproprioio2No ratings yet
- 3muri - Analisi Sismica Avanzata Di Edifici in MuraturaDocument42 pages3muri - Analisi Sismica Avanzata Di Edifici in MuraturaAlla Eddine G CNo ratings yet
- Milani CinematismiDocument84 pagesMilani CinematismivadaleNo ratings yet
- UNI EN 15050 - Travi Da Ponte - ClsDocument51 pagesUNI EN 15050 - Travi Da Ponte - ClsEmanuele MastrangeloNo ratings yet
- Il Varo Dei Viadotti Favazzina - SETECO IngegneriaDocument9 pagesIl Varo Dei Viadotti Favazzina - SETECO IngegneriaSteel_catNo ratings yet
- Ponte PedonaleDocument60 pagesPonte Pedonalepotassio815069No ratings yet
- Trave Su Suolo ElasticoDocument10 pagesTrave Su Suolo ElasticoPaoloGavardiNo ratings yet
- Tecnica Delle Costruzioni FlangiaDocument14 pagesTecnica Delle Costruzioni Flangiams_eurasiaNo ratings yet
- Volte Sottili Areticolari DelGuerraDocument37 pagesVolte Sottili Areticolari DelGuerraPriscilla CombsNo ratings yet
- Indicazione Per Interventi-V4Document41 pagesIndicazione Per Interventi-V4annac89No ratings yet
- Principi Costruttivi Degli EdificiDocument43 pagesPrincipi Costruttivi Degli EdificiLanorte VitoNo ratings yet
- 01 Costruzione Di Ponti 2008-09 Rev.0Document60 pages01 Costruzione Di Ponti 2008-09 Rev.0GuillaumeHNONo ratings yet
- Progetto Travata Taglio-DuttilitàDocument41 pagesProgetto Travata Taglio-DuttilitàGiancarlo MarcariNo ratings yet
- Teoria e Progetto Di Ponti Colonna Modello PDFDocument18 pagesTeoria e Progetto Di Ponti Colonna Modello PDFlinus18No ratings yet
- Borri Part1Document121 pagesBorri Part1Mario CimoliNo ratings yet
- Acciaio 1 Progetto Pensilina in Acciaio Agli SLU PDFDocument39 pagesAcciaio 1 Progetto Pensilina in Acciaio Agli SLU PDFconigliuNo ratings yet
- Relazione Di ProgettoDocument57 pagesRelazione Di ProgettoSig RossiNo ratings yet
- Pre e Post CompressioneDocument167 pagesPre e Post CompressioneEsprimus DuosNo ratings yet
- Teoria e Progetto Delle Costruzioni in Acciaio - Appunti 2010-2011Document235 pagesTeoria e Progetto Delle Costruzioni in Acciaio - Appunti 2010-2011Cristina CarusoNo ratings yet
- Tecnica Delle Costruzioni PIASTREDocument37 pagesTecnica Delle Costruzioni PIASTREDoulgorikyNo ratings yet
- Analisi Dinamica Con SAp2000Document183 pagesAnalisi Dinamica Con SAp2000carlosgrandeNo ratings yet
- Commentario delle nuove norme tecniche per le costruzioniFrom EverandCommentario delle nuove norme tecniche per le costruzioniRating: 5 out of 5 stars5/5 (1)
- P1. MmiDocument8 pagesP1. MmiMike RomeroNo ratings yet
- Verifiche Di InstabilitàDocument21 pagesVerifiche Di InstabilitàroferrNo ratings yet
- Trave Jawert Metodo CalcoloDocument14 pagesTrave Jawert Metodo CalcoloPippo FrancoNo ratings yet
- Relazione Telaio PianoDocument28 pagesRelazione Telaio PianoLudovica-Vittoria PivettaNo ratings yet
- Verifica Ritiri Differenziale PileDocument74 pagesVerifica Ritiri Differenziale PilemassimilianoNo ratings yet
- Principi Di ModellazioneDocument142 pagesPrincipi Di ModellazioneAnna FrignaniNo ratings yet
- TesiDocument189 pagesTesiGiovanni Govdòn BugliNo ratings yet
- Analisi Plinto Di Fondazione Di Una Torre EolicaDocument31 pagesAnalisi Plinto Di Fondazione Di Una Torre EolicaGiovanni Govdòn BugliNo ratings yet
- Rue - Nta Allegati Parte1 - ApprovatoDocument67 pagesRue - Nta Allegati Parte1 - ApprovatoGiovanni Govdòn BugliNo ratings yet
- JC SDC 070420Document10 pagesJC SDC 070420Giovanni Govdòn BugliNo ratings yet
- JC SDC 181120Document10 pagesJC SDC 181120Giovanni Govdòn BugliNo ratings yet
- JC SDC Dicembre 2019Document9 pagesJC SDC Dicembre 2019Giovanni Govdòn BugliNo ratings yet
- Corso Imola 2017 MandoliniDocument2 pagesCorso Imola 2017 MandoliniGiovanni Govdòn BugliNo ratings yet
- Orari Sante Messe-9 Sito20190511Document8 pagesOrari Sante Messe-9 Sito20190511Giovanni Govdòn BugliNo ratings yet
- Codice DeontologicoDocument16 pagesCodice DeontologicogcalzNo ratings yet
- Scheda Tecnica OSB 3 PDFDocument3 pagesScheda Tecnica OSB 3 PDFGiovanni Govdòn BugliNo ratings yet
- Ordinanza N. 2 Del 17 Febbraio 2020 AGENZIADocument13 pagesOrdinanza N. 2 Del 17 Febbraio 2020 AGENZIAGiovanni Govdòn BugliNo ratings yet
- Aversa Maiorano Mandolini-CorrettosDocument52 pagesAversa Maiorano Mandolini-CorrettosstraulleNo ratings yet
- Monti-VailatiANIDIS2009 IIDocument6 pagesMonti-VailatiANIDIS2009 IIGiovanni Govdòn BugliNo ratings yet
- Ordinanza N. 2 Del 17 Febbraio 2020 AGENZIADocument13 pagesOrdinanza N. 2 Del 17 Febbraio 2020 AGENZIAGiovanni Govdòn BugliNo ratings yet
- Valutazione Della Sicurezza Sismica Di Edifici in Legno A Pareti Intelaiate Gattesco Anidis2017Document10 pagesValutazione Della Sicurezza Sismica Di Edifici in Legno A Pareti Intelaiate Gattesco Anidis2017Giovanni Govdòn BugliNo ratings yet
- Tesi ANL MuraturaDocument156 pagesTesi ANL MuraturaGiovanni Govdòn BugliNo ratings yet
- WESTERN STARSokDocument1 pageWESTERN STARSokGiovanni Govdòn BugliNo ratings yet
- Tucson TrainDocument1 pageTucson TrainGiovanni Govdòn BugliNo ratings yet
- Somewhere North of Nashville. 1Document1 pageSomewhere North of Nashville. 1Giovanni Govdòn BugliNo ratings yet
- Capacità Portante Delle Fondazioni in Zona Sismica PDFDocument2 pagesCapacità Portante Delle Fondazioni in Zona Sismica PDFGiovanni Govdòn BugliNo ratings yet
- TesiDocument103 pagesTesiGiovanni Govdòn BugliNo ratings yet
- Nodi dm18 PDFDocument6 pagesNodi dm18 PDFGiovanni Govdòn BugliNo ratings yet
- Punzon ModificatoDocument22 pagesPunzon ModificatoAlket DhamiNo ratings yet
- TesiDocument82 pagesTesiGiovanni Govdòn BugliNo ratings yet
- Torsione Nei PontiDocument9 pagesTorsione Nei PontiIlaria IorlanoNo ratings yet
- TesiDocument155 pagesTesiGiovanni Govdòn BugliNo ratings yet
- 2011-11-23 Orlando Esempio CapannoneDocument82 pages2011-11-23 Orlando Esempio CapannoneLucaRampiniNo ratings yet
- Diverse Soluzioni Strutturali Per Edifici MultipianoDocument24 pagesDiverse Soluzioni Strutturali Per Edifici MultipianoGiovanni Govdòn BugliNo ratings yet
- Lezione14 2Document5 pagesLezione14 2Giovanni Govdòn BugliNo ratings yet
- Lezione13 2Document17 pagesLezione13 2Giovanni Govdòn BugliNo ratings yet
- Ciminiere Di Acciaio in LombardiaDocument12 pagesCiminiere Di Acciaio in LombardiaMARIORAPELLINo ratings yet
- Glossario Difetti Acciaio (Ftrmart)Document7 pagesGlossario Difetti Acciaio (Ftrmart)Stefano MasperNo ratings yet
- DIN 3990 Mdesign KissoftDocument10 pagesDIN 3990 Mdesign KissoftmgualdiNo ratings yet
- Fatica 8 - Metodi Di Conteggio Dei Cicli v2.0Document16 pagesFatica 8 - Metodi Di Conteggio Dei Cicli v2.0DaniloNo ratings yet
- ECM - 1 - Fatica - Intagli - Soluzioni - 2018Document13 pagesECM - 1 - Fatica - Intagli - Soluzioni - 2018badrNo ratings yet
- Verifica A FaticaDocument15 pagesVerifica A FaticaGianluca ButtarazziNo ratings yet
- Calcolo Ingranaggi UNI 8862 m4708 103 PDFDocument21 pagesCalcolo Ingranaggi UNI 8862 m4708 103 PDFmgualdiNo ratings yet
- CM 5 2016 Normative Da EN 1990 A EN 1090Document9 pagesCM 5 2016 Normative Da EN 1990 A EN 1090Priscilla Combs100% (1)
- Correlazione Tra Proprietà e Struttura Di Una Ghisa VermicolareDocument168 pagesCorrelazione Tra Proprietà e Struttura Di Una Ghisa VermicolarecarlonewmannNo ratings yet
- Infragilimento Da IdrogenoDocument2 pagesInfragilimento Da IdrogenoAnonymous nmIfiuaWaNo ratings yet