You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Upper and Lower LimitsDocument8 pagesUpper and Lower LimitsVinod VKNo ratings yet
- Factor and Remaimder TheoremDocument4 pagesFactor and Remaimder TheoremJoann NgNo ratings yet
- Matrix Methods For Field Problems: Roger F. HarringtonDocument14 pagesMatrix Methods For Field Problems: Roger F. HarringtondilaawaizNo ratings yet
- 11 Math - Test Maker @Document2 pages11 Math - Test Maker @ashfaq4985No ratings yet
- Random Process CalculusDocument9 pagesRandom Process CalculusAjay SinghNo ratings yet
- ComplexDocument17 pagesComplexKamran AhmedNo ratings yet
- Mathematics - III Assignment - I For EEE / EIE Students of RITSDocument1 pageMathematics - III Assignment - I For EEE / EIE Students of RITSgnathwNo ratings yet
- Reflectores de HouseholderDocument13 pagesReflectores de HouseholderPablo BurgosNo ratings yet
- ch02 PDFDocument108 pagesch02 PDFtoligado27No ratings yet
- Plato Practice Test 9th Grade JanDocument14 pagesPlato Practice Test 9th Grade JanJacqueline TurciosNo ratings yet
- 2d TransformationDocument6 pages2d Transformationsurya100% (1)
- Homework Set 1: Due August 14Document3 pagesHomework Set 1: Due August 14jog10No ratings yet
- AMS Classifications 2010Document47 pagesAMS Classifications 2010alexcojocaru72No ratings yet
- Linear Programming Chapter 3Document35 pagesLinear Programming Chapter 3Moses Umaru MwesigwaNo ratings yet
- Quadratic Equation: Very Short Answer Type QuestionsDocument26 pagesQuadratic Equation: Very Short Answer Type QuestionsMadhur MaheshwaryNo ratings yet
- Hitchin-2001-Stable Forms and SpecialDocument31 pagesHitchin-2001-Stable Forms and SpecialGuido FranchettiNo ratings yet
- Discrete Time SignalsDocument48 pagesDiscrete Time SignalsJomer JuanNo ratings yet
- Magic SquareDocument3 pagesMagic Squareapi-412422622No ratings yet
- Matrices RotationsDocument10 pagesMatrices RotationsBlackopsNo ratings yet
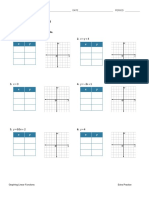
- Alg Lesson 4-1Document4 pagesAlg Lesson 4-1Camilo MartinezNo ratings yet
- Fem GaussDocument10 pagesFem GaussLana TodorovićNo ratings yet
- A List of Important Inequalities PDFDocument3 pagesA List of Important Inequalities PDFBenjamin Benicarlo Juanillo IIINo ratings yet
- Cambridge International AS & A Level: Mathematics 9709/13Document16 pagesCambridge International AS & A Level: Mathematics 9709/13IDKNo ratings yet
- Mat1512 Assignment 03 2023 Edited VersionDocument3 pagesMat1512 Assignment 03 2023 Edited VersionPiet. T MahlanguNo ratings yet
- Variation in PrinciplesDocument410 pagesVariation in PrinciplesiwakunbNo ratings yet
- 04 Numerical MethodsDocument9 pages04 Numerical MethodsSunilNo ratings yet
- MKL 2017 Developer Reference Fortran PDFDocument3,348 pagesMKL 2017 Developer Reference Fortran PDFHenrique Barbosa SoaresNo ratings yet
- E. Hille, Non-Oscillation TheoremsDocument19 pagesE. Hille, Non-Oscillation Theoremsiatrakisg8671No ratings yet
- Complex Numbers: Problem-SolvingDocument2 pagesComplex Numbers: Problem-SolvingK TariNo ratings yet
- Math Formula Sheet AIEEEDocument93 pagesMath Formula Sheet AIEEELokesh Kumar83% (6)