Professional Documents
Culture Documents
En Funcion A Economia
Uploaded by
javier oxolonOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
En Funcion A Economia
Uploaded by
javier oxolonCopyright:
Available Formats
Serie de Estudio
Instituto de Economa y Finanzas
Facultad de Ciencias Econmicas
Universidad Nacional de Crdoba
Argentina
Marzo de 2003
2
Notas sobre ecuaciones diferenciales.
Aplicaciones a la Teora del Crecimiento Econmico
Calcagno, Juan Carlos
Licari, Juan Manuel
Pellegrini, Santiago
Instituto de Economa y Finanzas
Facultad de Ciencias Econmicas
Universidad Nacional de Crdoba
Resumen: El objetivo del presente ensayo es integrar principios
matemticos y econmicos con comandos computacionales para resolver
ecuaciones diferenciales. Para cumplirlo, se realiza una revisin
terica sobre el tema y ejercitaciones con un software adecuado. A
partir de este instrumental matemtico e informtico, se estudian en
profundidad dos aplicaciones relacionadas a la teora del crecimiento
econmico: el modelo Harrod-Domar y el modelo de Solow.
Palabras Clave: Ecuaciones diferenciales ordinarias - Modelo Harrod
Domar - Modelo de Solow - Mathematica 4.0
La presente nota forma parte de una serie de trabajos de investigacin a publicar como
resultado del Programa Mtodos Cuantitativos. Optimizacin Dinmica.
Correo electrnico de los autores: calca@eco.unc.edu.ar; licarijm@eco.unc.edu.ar;
sanpelle@eco.unc.edu.ar
3
Durante aos, la esttica comparativa ha sido el marco de anlisis dominante
en la teora econmica. Esta perspectiva asume arbitrariamente la existencia
ineludible de un equilibrio mediante un proceso de ajuste econmico. Sin embargo,
los problemas econmicos actuales observados en los distintos pases y regiones del
mundo se relacionan en mayor medida con la posibilidad de acceder a ese equilibrio
en lugar de darlo por supuesto.
Este nuevo enfoque ha sido rescatado por la teora moderna, al reservarle un
lugar preponderante a la dinmica econmica. El rol de las ecuaciones diferenciales
es elemental al permitir incorporar el tiempo utilizando variables desconocidas y
sus respectivas derivadas. La solucin a esta compleja asociacin de variables
resulta, en ocasiones, difcil de revelar. Debido a ello, es comn recurrir a
sistemas computacionales que combinen operaciones numricas, simblicas y grficas
para su resolucin.
A partir de estos modernos desarrollos tericos, el presente ensayo se
plantea como objetivo principal la integracin de principios matemticos y
econmicos con comandos computacionales para resolver ecuaciones diferenciales.
El trabajo sigue la siguiente estructura: en la seccin 1 se realiza una
revisin terica sobre ecuaciones diferenciales. A continuacin, la seccin 2
presenta, a modo introductorio, ejercitaciones simples con el software Mathematica
4. En las secciones 3 y 4, se rescatan los conceptos bsicos sobre crecimiento
econmico del modelo Harrod-Domar y del modelo de Solow, respectivamente. La
resolucin grfica y algebraica de stos, se realiza integrando al software
mencionado en el anlisis.
1.1. Ecuaciones diferenciales. Definicin y clasificaciones
La principal caracterstica de una ecuacin diferencial es la presencia de
derivadas en su formulacin. Genricamente puede representarse como:
( ) 0 t , y , y ..., , y , y F
1 1 n n
(1)
donde:
n ..., , 2 , 1 i
t
y
y
i
i
i
(2)
En la expresin genrica (1) aparecen dos variables (y, t) y las sucesivas derivadas
de y con respecto a t. La inclusin de slo dos variables categoriza a esta ecuacin
dentro de las denominadas ecuaciones diferenciales ordinarias. Parciales, por el
contrario, sern aquellas que incluyan ms de dos variables relacionadas. A lo largo
del presente ensayo, se trabajar nicamente con ecuaciones ordinarias.
4
En caso de ser factible, es usual reordenar (1), despejando a la derivada de
mayor grado como funcin del resto de variables:
( ) t , y , y ..., , y f y
1 1 n n
(3)
La derivada de mayor orden presente en una ecuacin diferencial, define el orden de
la misma. As determinada, la ecuacin general (1) se clasifica como una ecuacin
diferencial de orden n.
A su vez, las ecuaciones diferenciales ordinarias pueden agruparse en
lineales y no lineales. Si (1) puede expresarse en la forma:
) t ( g y ) t ( a y ) t ( a ... y ) t ( a y ) t ( a
0
1
1
1 n
1 n
n
n
+ + + +
(4)
entonces dicha ecuacin diferencial ser lineal. En caso contrario la misma es no
lineal. La definicin de los coeficientes ) t ( a
i
genera una nueva clasificacin para
las ecuaciones diferenciales lineales. Si cada coeficiente es independiente de la
variable t (
i i
a ) t ( a ), la ecuacin es lineal con coeficientes constantes. Con
coeficientes variables ser si algn coeficiente depende de t.
El anlisis del segundo miembro de la expresin (4) permite una
categorizacin adicional. Si 0 ) t ( g , la ecuacin diferencial es homognea. En caso
contrario, ser no homognea.
Por ltimo, si una ecuacin diferencial como (1) no incorpora en su
definicin explcitamente a la variable t, la misma es autnoma
1
. La relacin
planteada en (5) ejemplifica este caso.
( ) 0 y , y ..., , y , y F
1 1 n n
(5)
1.2. Ecuaciones diferenciales. Su solucin
Solucionar una ecuacin diferencial implica encontrar una relacin entre t y
la variable y, de manera tal que la ecuacin original sea satisfecha. Ello implica
hallar:
) t ( y (6)
Tal que:
( ) 0 t ), t ( , ) t ( ..., , ) t ( , ) t ( F
1 1 n n
(7)
Donde:
n ..., , 2 , 1 i
t
) t (
) t (
i
i
i
(8)
1
Tngase en mente que si bien no aparece t en la formulacin de (5), si estn presentes las
sucesivas derivadas de y respecto de t.
5
Debe destacarse la importancia de interpretar la solucin presentada en (6). A
partir de una ecuacin donde aparecen dos variables y las sucesivas derivadas de una
respecto de la otra; solucionar la misma implica encontrar una relacin entre las
dos variables originales. En otras palabras, se busca eliminar las derivadas y
relacionar slo las variables del problema. Si en un caso particular t representa el
tiempo, resolver (1) sera encontrar una solucin (6), que refleje la trayectoria de
y en t.
La expresin planteada en (6) supone la posibilidad de relacionar a las
variables de manera explcita. En muchos casos, slo es factible hallar soluciones
implcitas como:
0 ) y , t ( (9)
Por otra parte, si la solucin encontrada en (6) surge de resolver (1), sin
condiciones adicionales, la expresin es conocida como solucin general. En su
formulacin, aparecern una serie de constantes o parmetros, siendo su cantidad
igual al orden de la ecuacin diferencial en cuestin. En aquellos casos donde
exista un conjunto de condiciones iniciales al que se sujeta el problema, los
coeficientes o parmetros tomarn valores particulares, de acuerdo a las condiciones
pertinentes.
1.3. Ecuaciones diferenciales. Anlisis cualitativo
La obtencin de la solucin analtica de una ecuacin diferencial resulta, en
muchas oportunidades, dificultosa e incluso imposible. Sin embargo, un anlisis del
tipo cualitativo puede aportar indicios sobre el comportamiento de la solucin, aun
sin conocerla.
Una primera aproximacin cualitativa a la solucin resulta del estudio de los
denominados conjuntos direccin. Esta metodologa es utilizada para el caso de
ecuaciones ordinarias de primer orden. Genricamente:
] t , y [ f ' y
(10)
La intencin es resolver (10), de manera tal que se obtenga la relacin ) t ( y ,
planteada como la solucin en (6). Debe estar presente que sta debe satisfacer la
ecuacin diferencial, por lo cual:
] t , y [ f ' ) t ( ' y
(11)
Con un vector en la forma ] t , y [
0 0
puede, segn (10), encontrarse y. Pero a su vez,
por (11), ' ) t ( ' y
. En otras palabras, an sin conocer la solucin explcita ) t ( ,
puede encontrarse su derivada respecto de t, simplemente reemplazando al vector
6
] y , t [
0 0
en la ecuacin diferencial (10). Con desconocimiento de la forma analtica
de la solucin, puede estudiarse su comportamiento.
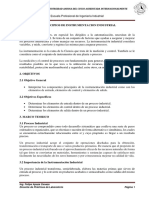
En el grfico 1 se presenta este anlisis. Una vez elegido ] t , y [
0 0
, se procede
a calcular
0
' y utilizando (10). El valor
0
' y , segn ha sido demostrado, representar
la pendiente de la solucin para el punto que ha sido escogido arbitrariamente
(
0
' ). Un segmento con esta pendiente se ha dibujado en el punto.
Repitiendo el proceso para diferentes vectores iniciales ] t , y [ , se obtendr
una serie de segmentos cuya pendiente es igual a la de la solucin en el punto. El
conjunto de todos los segmentos es llamado conjunto direccin o conjunto tangente.
Los diagramas de fase permiten tambin un anlisis cualitativo. Ellos son una
representacin grfica de la direccin de cambio de la variable, en una ecuacin
diferencial de primer orden y autnoma. Se busca estudiar la presencia y
caracterizacin de soluciones estacionarias
2
, las cuales se encuentran cuando:
0 ' y
(12)
2
La solucin estacionaria suele denominarse tambin estado estacionario, punto estacionario
o simplemente equilibrio.
t
0
t
y
y
0
La pendiente de este
segmento es
o
'
Grfico 1. Generacin de
o
'
t
1
t
0
t
2
t
y
y
1
y
0
y
2
Grfico 2. Conjunto direccin
7
B
D
E
Se resolver por lo tanto:
0 ] y [ f (13)
y se hallar el valor y* tal que 0 ] * y [ f .
El paso siguiente es investigar el tipo de estado estacionario. Resulta
relevante conocer si dicho equilibrio es o no estable. Si para valores menores a y*
la variable tiende a aumentar y, simultneamente, para valores mayores la variable
tiende a disminuir el estado estacionario es estable. En cualquier otro caso, la
solucin es inestable. El grfico 3 muestra, con el sentido de las flechas, la
direccin del movimiento de la variable y.
Los puntos 4 , 3 , 2 , 1 i , y
i
poseen la caracterstica comn de hacer 0 ' y . Sin
embargo, de la observacin del sentido de las flechas surgen claramente diferencias
entre ellos. Para y
1
, si la variable y se encuentra a su izquierda (con valores
menores) la misma tiende a moverse hacia el estado estacionario. Pero si se parte de
un valor mayor, la variable se aleja. Claramente el punto y
1
no es estable. Un
anlisis similar le cabe a y
3
(considerando el sentido opuesto de las flechas en
este caso). El valor de estado estacionario y
4
es alcanzado slo si se parte de
dicho punto. Si la variable se ubica a su izquierda (derecha) tiende a disminuir
(aumentar), alejndose del equilibrio, siendo un estado estacionario inestable. Por
ltimo, situados en el entorno de y
2
, a su izquierda (derecha), y tiende a aumentar
(disminuir), estableciendo un estado estacionario estable.
Al trabajar con ecuaciones diferenciales de primer orden y autnomas, adems
del diagrama de fase, el estudio grfico de la relacin ] y [ f ' y
proporciona gran
informacin. Supongamos que dicha funcin se comporta de acuerdo a lo expuesto en el
grfico 4.
y y
4
y
3 y
2
y
1
Grfico 3. Diagrama de fase
y
y
0
Grfico 4. Representacin de ] y [ f ' y
A
F
C
8
Los puntos B y E son equilibrios de estado estacionario, puesto que 0 ' y . A la
izquierda de B (en un punto como A), para valores de y menores al estado
estacionario, 0 ' y < . La variable tiende a decrecer y a alejarse de y*
B
. A su
derecha, en C, se observa que 0 ' y > lo que establece que y crece a lo largo del
tiempo, separndose del valor de estado estacionario. El equilibrio y*
B
es
inestable.
Para el punto estacionario y*
E
, el comportamiento de y es diferente. A la izquierda
de E (punto D) 0 ' y > , lo que hace que la variable crezca acercndose al punto E.
Para valores mayores que y*
E
, como es el caso del punto F, puede apreciarse que
0 ' y < . A medida que pase el tiempo, disminuir de valor, acercndose al estado
estacionario. El equilibrio y*
E
resulta por lo tanto estable.
A manera de conclusin, puede establecerse que si la pendiente de y respecto
de y es negativa en el entorno de un estado estacionario, dicho equilibrio es
estable. En caso contrario, ser inestable. Algebraicamente:
estable es equilibrio El 0
y
] y [ f
y
' y
<
inestable es equilibrio El 0
y
] y [ f
y
' y
1.4. Ecuaciones diferenciales. Hallando la solucin
Hasta el momento se ha trabajado describiendo la solucin de una ecuacin
diferencial como ) t ( y . Sin embargo, no se ha profundizado respecto de la forma
funcional que asume esta relacin para determinados tipos de ecuaciones
diferenciales. Por ello, se desarrolla a continuacin la solucin a una ecuacin
diferencial de orden n, lineal y con coeficientes constantes. Este tipo de
ecuaciones aparece de manera recurrente en modelaciones econmicas.
Se dar comienzo con el caso homogneo. En trminos generales, la ecuacin
diferencial ser:
0 y a y a ... y a y a
0
1
1
1 n
1 n
n
n
+ + + +
(14)
Previo al estudio de las soluciones, debe conocerse que para ecuaciones
diferenciales lineales y homogneas, si se obtienen n soluciones linealmente
independientes (LI), toda combinacin lineal de ellas es tambin una solucin. Este
argumento es conocido como el Principio de Superposicin y permite hallar la
solucin general de la ecuacin diferencial.
Algebraicamente, considerando a los valores ( ) n ,..., 1 i c
i
como parmetros, la
combinacin lineal es igual a y(t), representada en la forma:
9
+ + +
n
1 i
i i n n 2 2 1 1
) t ( y c ) t ( y c ... ) t ( y c ) t ( y c ) t ( y (15)
Las n soluciones linealmente independientes (y
i
) tendrn la forma ) t ( y . Una vez
reemplazadas en (14), la ecuacin debe verificarse.
Es vlido cuestionar la posibilidad de comprobar la independencia de las mismas.
Para ello, se genera un determinante W (Wronskian) a partir de las n funciones y
i
y
de sus sucesivas derivadas respecto de t y luego se comprueba el signo del mismo.
n
n
n
2
n
1
n 2 1
n 2 1
n 2 1
y y y
' y ' y ' y
y y y
] y ,..., y , y [ W
K
M O M M
K
K
(16)
Concentrados en el signo de W:
LI son soluciones Las 0 W
LD son soluciones as L 0 W
Una vez definidos estos conceptos, es momento de buscar la solucin de (14).
Supongamos la presencia de una solucin en la forma
t r
e y . Esta expresin, si
realmente resuelve la ecuacin diferencial, debe verificarla. Reemplazando en (14):
0 e a
t
) e (
a ...
t
) e (
a
t
) e (
a
rt
0
rt
1
1 n
rt 1 n
1 n
n
rt n
n
+
+ +
Resolviendo las derivadas:
0 e a ) e ( r a ... ) e ( r a ) e ( r a
rt
0
rt
1
rt 1 n
1 n
rt n
n
+ + + +
Extrayendo
t r
e como factor comn:
[ ] 0 a r a ... r a r a e
0 1
1 n
1 n
n
n
rt
+ + + +
Conociendo que la expresin
t r
e no asumir el valor cero (puesto que se trata de
una potencia con base no nula), puede representarse el siguiente polinomio de grado
n, en la variable r:
0 a r a ... r a r a ) r ( P
0 1
1 n
1 n
n
n
+ + + +
(17)
Los n valores que asuma r, como soluciones de (17), permitirn formar las n
soluciones de la ecuacin diferencial (14). Simbolizando r
i
a cada solucin del
polinomio, las n soluciones de la ecuacin (y
i
) resultarn:
n ..., , 2 , 1 i e y
t r
i
i
(18)
Han sido halladas n soluciones para la ecuacin diferencial lineal de orden n
y con coeficientes constantes (14). Su forma funcional depender de los valores de r
que resuelven la expresin (17). Los ceros del polinomio juegan un rol fundamental,
puesto que generan las soluciones de la ecuacin diferencial. Debe reconocerse que
10
se busca encontrar un conjunto de n soluciones linealmente independientes, para
utilizar el Principio de Superposicin y hallar as la solucin general de la
ecuacin diferencial.
Si el polinomio es de grado n, estar asegurada la presencia de n soluciones. Las
mismas pueden ser reales y diferentes, reales pero con alguna raz repetida e
incluso imaginarias. Cada caso plantea cuestiones particulares al momento de hallar
soluciones a (14) linealmente independientes.
Comenzando con el caso ms sencillo, el de n races reales y distintas que
satisfacen 0 ) r ( P . Podrn hallarse n soluciones en la forma
t r
i
i
e y que
reemplazadas en W, resulta:
0
e r e r e r
e r e r e r
e e e
] y ,..., y , y [ W
t r n
n
t r n
2
t r n
1
t r
n
t r
2
t r
1
t r t r t r
n 2 1
n 2 1
n 2 1
n 2 1
K
M O M M
K
K
(19)
Las n soluciones de la ecuacin diferencial son linealmente independientes.
Para visualizar esta afirmacin, considrese el caso de una ecuacin diferencial
lineal de orden 2. El determinante W resultar:
[ ]
2 1 1 2 1 i i 2 1 1
2 1
2 1
r r
1
r r
2
t t r
1
t r t r
2
t r
t r
2
t r
1
t r t r
e r e r e e r e e r e
e r e r
e e
W
+ +
[ ]
1 2
r r t
r r e e W
2 2
+
Al ser W el producto de tres factores, asumir el valor cero slo si al menos uno de
ellos es nulo. Los factores
2 i
r r t
e e
+
son potencias con base no nula, lo que
imposibilita que asuman el valor cero. Adems, [ ] 0 r r
1 2
ya que se est analizando
el caso de races del polinomio reales y distintas. Queda claro entonces que 0 W ,
lo cual permite afirmar que las soluciones
t r
i
i
e y son linealmente independientes.
Utilizando el Principio de Superposicin, la solucin general para el caso de
n races reales y distintas resultar:
+ + +
n
1 i
t r
i
t r
n
t r
2
t r
1
i n 2 1
e c e c ... e c e c ) t ( y (20)
En el segundo caso de anlisis, el polinomio 0 ) r ( P puede presentar races
reales y repetidas. Supongamos que de las n soluciones, existe una raz real r* que
se repite un nmero k de veces (siendo n k ). Agrupando las k soluciones que
surgiran de reemplazar r* en la relacin
t r
i
i
e y surge:
{ } { }
t * r t * r t * r
k 2 1
e ..., , e , e y ..., , y , y B
11
El conjunto B contiene k soluciones iguales, y por ende linealmente dependientes. El
determinante W ser igual a cero y el Principio de Superposicin no podr usarse
para generar la solucin general. Sin embargo, puede crearse el siguiente conjunto
alternativo:
{ } { }
t * r 1 k t * r 2 t * r t * r
k 2 1
e t ..., , e t , e t , e y ..., , y , y C
Se demuestra que el conjunto C contiene k soluciones a la ecuacin diferencial (14)
y que adems, ellas son LI. Una vez encontradas las n soluciones LI, se formula la
solucin general:
t * r 1 j
k
1 j
j
k n
1 i
t r
i
e t c e c ) t ( y
i
+ (21)
En el Apndice se comprueba este enunciado para el caso en que 2 k n .
La tercera y ltima posibilidad es la aparicin de races imaginarias en el
polinomio 0 ) r ( P . Se supone que:
i v h r
1
+ (22)
i v h r
2
(23)
son dos races complejas conjugadas que satisfacen el polinomio 0 ) r ( P . Las
soluciones:
t ) i v h (
1
e y
+
(24)
t ) i v h (
2
e y
(25)
satisfacen la ecuacin diferencial y permiten armar la solucin general:
t ) i v h (
2
t ) i v h (
1
e c e c ) t ( y
+
+ (26)
Aunque (26) refleja la solucin de la ecuacin diferencial, la existencia de la
componente imaginaria en su formulacin no permite comprender el comportamiento de y
respecto de t de manera clara. Por ello, utilizando la frmula de Euler, puede
transformarse la expresin (26) en otra que elimine la componente imaginaria. Se
demuestra que la solucin general es:
t h
2
t h
1
e ) vt ( seno k e ) vt cos( k ) t ( y
+
(27)
siendo
2 1 2 2 1 1
c c k c c k + .
Ha concluido el desarrollo para ecuaciones lineales, de orden n, con
coeficientes constantes y homogneas. Resta establecer la solucin para casos con
similares caractersticas, pero no homogneas. La ecuacin en trminos generales se
define como:
) t ( g y a y a ... y a y a
0
1
1
1 n
1 n
n
n
+ + + +
(28)
12
Se demuestra que para el caso de ecuaciones no homogneas, la solucin general est
compuesta por la suma de dos partes: una solucin complementaria (y
c
) y una
particular (y
p
). Algebraicamente:
) t ( y ) t ( y ) t ( y
p c
+ (29)
La solucin complementaria no es otra que la que se obtiene al suponer 0 ) t ( g en
(28). Es decir, es la relacin encontrada para el caso homogneo.
0 ) y ..., , y , y ( W siendo ) t ( y c )) t ( y
n 2 1
n
1 i
i i c
(30)
La solucin particular debe encontrarse de manera diferente. Existen mtodos
alternativos que permiten acceder a esta solucin. Uno de ellos es el
conocido como Mtodo de Coeficientes Indeterminados. Para el lector
interesado en esta mecnica, srvase revisar Huang y Crooke (1997).
A manera de conclusin puede enunciarse que la solucin general de una
ecuacin diferencial lineal, con coeficientes constantes, de orden n y no homognea
viene dada por:
0 ) y ..., , y , y ( W siendo ; ) t ( y ) t ( y c )) t ( y )) t ( y ) t ( y
n 2 1 p
n
1 i
i i p c
+ +
(31)
Las soluciones y
i
se generan a partir del polinomio:
0 a r a ... r a r a ) r ( P
0 1
1 n
1 n
n
n
+ + + +
en la forma:
t r
i
i
e y
debiendo considerarse el tipo de raz que surja, segn lo expuesto anteriormente.
2. Resolucin utilizando Mathematica 4.0
En esta seccin se resolvern dos ecuaciones diferenciales utilizando el
instrumental proporcionado por el software Mathematica 4.0. Para cada una de ellas
se proceder a encontrar la solucin general, la complementaria y la particular
enfatizando en su representacin grfica.
2.1. Resolucin del primer ejemplo
La primera de las ecuaciones es lineal, de primer orden, no homognea y con
coeficientes constantes:
2
t b ) t ( y a ) t ( ' y (32)
13
El primer paso para la resolucin con el software, es borrar de la memoria
las variables e ingresar a (32).
In[1]:= Clear@a, b, c, g, d, e, y, f, t, yo, yc, ypD;
eq1 =y'@tD a* y@tD+b* t^2
Out[2]= y
@tD==bt
2
+ay@tD
Para el desarrollo posterior ser conveniente redefinir (32) como:
2
t b y a ) t , y ( f ' y + (33)
In[3]:= f@y_, t_D=b* t^2 +a* y
Out[3]= b t
2
+a y
En este caso concreto tambin se determina la ecuacin homognea que surge de (32),
es decir, cuando b = 0. Ello resulta relevante puesto que a posteriori se buscar la
solucin complementaria.
In[4]:= eq1c =yc'@tD a* yc@tD
Out[4]= yc
@tD==a yc@tD
Para hallar la solucin general se utiliza el comando DSolve[]. El mismo
permite resolver (32), sin explicitar condicin inicial alguna.
In[5]:= sol =DSolve@eq1, y@tD, tD
Out[5]= : : y@tD-
b H2 +2 a t +a
2
t
2
L
a
3
+
at
C@1D>>
In[6]:= y@t_D=y@tD. sol
Out[6]= : -
b H2 +2 a t +a
2
t
2
L
a
3
+
at
C@1D>
Para aplicar la condicin y(0) = yo, se siguen los siguientes pasos:
In[7]:= eq2 =y@0D yo
Out[7]= : -
2 b
a
3
+C@1D>==yo
Reemplazando la constante por lo encontrado, en trminos de yo, resulta:
In[8]:= y@t_D=y@tD. C@1DHyo+2* b aL Simplify
Out[8]= : -
b H2 +2 a t +a
2
t
2
L
a
3
+
at
J
2 b
a
+yoN>
Para comprobar que lo hallado es solucin de (32), se procede a evaluar la
ecuacin eq1 para y*(t), observando si la identidad se cumple.
In[9]:= Evaluate@FullSimplify@eq1DD
Out[9]= True
El prximo paso es encontrar la solucin complementaria, yc(t).
In[10]:= sol2 =DSolve@eq1c, yc@tD, tD FullSimplify
Out[10]= 88yc@tD
at
C@1D<<
14
In[11]:= yc@t_D=yc@tD. sol2
Out[11]= 8
at
C@1D<
In[12]:= yc@t_D=yc@tD. C@1DJ
2 b
a
+yoN
Out[12]= :
at
J
2 b
a
+yoN>
Se evala nuevamente la solucin en la eq1c:
In[13]:= Evaluate@FullSimplify@eq1cDD
Out[13]= True
Para encontrar la integral particular, se valdr de la relacin entre la
solucin general y la complementaria:
) t ( yc ) t ( y ) t ( yp ) t ( yp ) t ( yc ) t ( y +
In[14]:= yp@t_D=FullSimplify@y@tD- yc@tDD
Out[14]= : -
b H2 +a t H2 +a tLL
a
3
>
Los parmetros arbitrarios a, b, yo se valuarn de manera que se asegure la
convergencia (la integral complementaria se anula con t que tiende a infinito). Esto
se comprueba tomando lmite a yc(t).
In[15]:= tryc =Table@yc@tD. 8yo 1, b 2, a - 2<D
Out[15]= 8-
- 2t
<
In[16]:= limtryc =Limit@tryc, t InfinityD
Out[16]= 80<
Se determina tambin la integral particular para los parmetros elegidos.
In[17]:= tryp =Table@yp@tD. 8yo 1, b 2, a - 2<D Simplify
Out[17]= :
1
2
- t +t
2
>
Luego de hallar una trayectoria determinada para y(t), yc(t) e yp(t), se
procede a graficarla en funcin del tiempo.
In[18]:= graph1 =Plot@Evaluate@8tryc, tryp, tryc +tryp<D, 8t, 0, 4<,
AxesLabel 8"t", "yHtL"<, PlotRange 880, 2<, 8- 1.5, 3<<,
PlotStyle 8Dashing@80.015<D, Dashing@80.015<D, 8<<,
Epilog 8Text@"ypHtL", 80.25, 0.55<D, Text@"ycHtL", 80.25, - 1<D,
Text@"yHtL", 81.92, 1.85<D<D;
15
0.25 0.5 0.75 1 1.25 1.5 1.75 2
t
-1
1
2
3
yHtL
ypHtL
ycHtL
yHtL
Por ltimo, se presenta el campo vectorial correspondiente a la funcin
definida en (33), acompaada de la solucin de (32). El estudio de los campos
vectoriales es anlogo al de los conjuntos direccin, con la salvedad de que en el
primer caso, en lugar de presentarse segmentos con pendiente igual a y(t), se
generan vectores en la forma [1,y(t)]. Resulta evidente que la inclinacin de ellos
coincide con la de los primeros.
In[19]:= f@y_, t_D=f@y, tD. 8b 2, a - 2<
Out[19]= 2 t
2
- 2 y
Antes de correr los comandos correspondientes para graficar el campo
vectorial, se debe cargar en el Kernel del programa el paquete de funciones que
contiene al comando PlotVectorField[].
In[20]:= <<Graphics`PlotField`
In[21]:= graph2 =PlotVectorField@81, f@y, tD<, 8t, 0, 3<, 8y, - 1, 2<, PlotPoints 14,
DisplayFunction IdentityD;
graph3 =Plot@Evaluate@tryc+trypD, 8t, 0, 2<, DisplayFunction IdentityD;
Show@8graph2, graph3<, PlotRange 8- 1, 2<, Axes - >True, DisplayFunction $DisplayFunctionD
16
0.5 1 1.5 2 2.5 3
-1
-0.5
0.5
1
1.5
2
2.2. Resolucin del segundo ejemplo
A continuacin, se resolver una ecuacin lineal, de tercer orden, no
homognea y con coeficientes constantes.
) t ( Seno ) t ( y ) t ( ' y 5 . 3 ) t ( ' ' y 5 . 3 ) t ( y
) 3 (
+ + + (34)
In[24]:= Clear@t, y, yc, yg,ypD
In[25]:= eq3 =y'''@tD+3.5* y''@tD+3.5* y'@tD+y@tD Sin@tD
eq3c =yc'''@tD+3.5* yc''@tD+3.5* yc'@tD+yc@tD 0
Out[25]= y@tD+3.5 y
@tD+3.5 y
@tD+y
H3L
@tD==Sin@tD
Out[26]= yc@tD+3.5 yc
@tD+3.5 yc
@tD+yc
H3L
@tD==0
En primer lugar se encontrar la solucin complementaria.
In[27]:= yc@t_D=yc@tD. DSolve@eq3c, yc@tD, tD
Out[27]= 8
- 2.t
C@1D+
- 1.t
C@2D+
- 0.5t
C@3D<
Para obtener una mayor idea sobre los r
i
de la solucin de (34), se halla el
polinomio caracterstico y se grafica como funcin de r.
In[28]:= poly@r_D=r^3 +3.5* r^2 +3.5* r +1;
Plot@poly@rD, 8r, - 3, 0.5<, AxesLabel 8"r", "PHrL"<D
-3 -2.5 -2 -1.5 -1 -0.5 0.5
r
-0.6
-0.4
-0.2
0.2
0.4
0.6
0.8
PHrL
17
In[30]:= ro =Roots@poly@rD 0, rD
Out[30]= r ==- 2. r ==- 1. r ==- 0.5
Se prueba que los r
i
son reales y distintos, todos con signo negativo. Esta
caracterstica permite la convergencia de la solucin complementaria hacia la
integral particular.
El prximo paso es comprobar si las soluciones del tipo
t r
i
e son linealmente
independientes entre s. Para ello se construye el Wronskian (W).
In[31]:= yc@t_D=yc@tD. 8C@1Dc1, C@2Dc2, C@3Dc3<
Out[31]= 8c1
- 2.t
+c2
- 1.t
+c3
- 0.5t
<
In[32]:= Do@w@iD=yc@tD@@1, i,2DD, 8i,3<D
In[33]:= W =88w@1D, w@2D, w@3D<, 8D@w@1D, tD, D@w@2D, tD, D@w@3D, tD<,
8D@w@1D, 8t, 2<D, D@w@2D, 8t, 2<D, D@w@3D, 8t, 2<D<<
Out[33]= 88
- 2.t
,
- 1.t
,
- 0.5t
<, 8- 2.
- 2.t
, - 1.
- 1.t
, - 0.5
- 0.5t
<, 84.
- 2.t
, 1.
- 1.t
, 0.25
- 0.5t
<<
Si el determinante de W es no nulo para todo el intervalo de t, se est en
condiciones de afirmar que la combinacin lineal de las soluciones con el vector de
constantes existe y es tambin solucin para yc(t).
In[34]:= Det@WD
Out[34]= 0.75
- 3.5t
Sabiendo que el determinante es no nulo, se procede a hallar el vector de constantes
(c
i
) en trminos de las condiciones iniciales:
2 y ) 0 ( ' ' y , 1 y ) 0 ( ' y , yo ) 0 ( y
In[35]:= Wo =W . t 0
Out[35]= 881, 1, 1<, 8- 2., - 1., - 0.5<, 84., 1., 0.25<<
In[36]:= Yo =8yo, y1, y2<
Out[36]= 8yo, y1, y2<
In[37]:= WC =Wo.
i
k
c1
c2
c3
y
{
Out[37]= 88c1+c2 +c3<, 8- 2. c1- 1. c2 - 0.5 c3<, 84. c1 +1. c2 +0.25 c3<<
In[38]:= sol =Solve@8WC@@1, 1DD yo, WC@@2, 1DD y1, WC@@3, 1DD y2<, 8c1, c2, c3<D; FullSimplify
In[39]:= Transpose@solD
Out[39]= 88c1 1. yo+1.33333 H3. H- 1. y1 - 2. yoL +1. H- 1. y2 +4. yoLL +
1. H- 1. y1 - 2. yo - 2. H3. H- 1. y1 - 2. yoL +1. H- 1. y2 +4. yoLLL<,
8c2 1. y1+2. yo +2. H3. H- 1. y1 - 2. yoL +1. H- 1. y2 +4. yoLL<,
8c3 - 1.33333 H3. H- 1. y1 - 2. yoL +1. H- 1. y2 +4. yoLL<<
Una vez obtenida yc(t) se busca ahora la solucin general y(t) de (34).
18
In[40]:= gensol =DSolve@8eq3, y@0D yo, y'@0D y1, y''@0D y2<, y@tD, tD FullSimplify
Out[40]= 88y@tD
- 2.t
H0.133333+1. y1+0.666667 y2+
t
H- 1.- 5. y1- 2. y2- 2. yoL +
0.333333 yo+
1.5t
H1.06667+4.y1 +1.33333 y2+2.66667 yoL - 0.2
2.t
HCos@tD+Sin@tDLL<<
In[41]:= y@t_D=y@tD. gensol@@1DD
Out[41]=
- 2.t
H0.133333 +1. y1+0.666667 y2 +
t
H- 1. - 5. y1 - 2. y2 - 2. yoL +
0.333333 yo+
1.5t
H1.06667+4. y1 +1.33333 y2 +2.66667 yoL - 0.2
2.t
HCos@tD+Sin@tDLL
Se construyen trayectorias alternativas para diferentes valores de (yo, y1, y2) y se
procede, por ltimo, a graficarlas.
In[42]:= tray2 =Table@y@tD. 8yo 8- 1, 2, 4, 1<, y1 80, 1, 3, 4<, y2 8- 1, 0, 2, 5<<D
Out[42]= 8
- 2.t
H- 0.866667 +3.
t
- 2.93333
1.5t
- 0.2
2.t
HCos@tD+Sin@tDLL,
- 2.t
H1.8 - 10.
t
+10.4
1.5t
- 0.2
2.t
HCos@tD+Sin@tDLL,
- 2.t
H5.8 - 28.
t
+26.4
1.5t
- 0.2
2.t
HCos@tD+Sin@tDLL,
- 2.t
H7.8 - 33.
t
+26.4
1.5t
- 0.2
2.t
HCos@tD+Sin@tDLL<
In[43]:= graph4 =Plot@Evaluate@tray2D, 8t, 0, 25<, PlotRange 8- 1.5, 6.5<,
AxesLabel 8"t", "yHtL"<D;
5 10 15 20 25
t
-1
1
2
3
4
5
6
yHtL
Es posible observar a partir del grfico anterior cmo las diferentes
trayectorias convergen a una sola senda de y(t), determinada por la integral
particular:
[ ] ) t ( Cos ) t ( Sen 2 . 0 ) t ( yc ) t ( y ) t ( yp +
In[44]:= yp@t_D=FullSimplify@y@tD- yc@tDD
Out[44]= 8- 0.2 HCos@tD+Sin@tDL<
3. Modelo Harrod-Domar
El modelo Harrod-Domar es una extensin de la teora Keynesiana al
crecimiento econmico. Los autores asumen una funcin de produccin agregada con
coeficientes tcnicos fijos del tipo Leontief:
,
_
u
L
,
v
K
Min Y
19
donde Y es el ingreso de la economa, K y L los factores de produccin capital y
trabajo respectivamente, Y / K v y Y / L u . El modelo original supone al ahorro
S como funcin proporcional del ingreso. La inversin I se representa por el cambio
en el stock de capital y es proporcional al cambio del ingreso a lo largo del
tiempo. Estas premisas bsicas pueden modelarse a partir del siguiente conjunto de
ecuaciones:
sY S (35)
' Y v ' K I (36)
En una situacin de equilibrio, los recursos disponibles para incrementar el
stock de capital, el ahorro, deben ser igual a la inversin. Utilizando las
definiciones (35) y (36) la condicin de igualdad ahorro-inversin puede
representarse como:
sY ' Y v
0 Y
v
s
' Y (37)
Logrando as una ecuacin diferencial de primer orden, lineal, con coeficientes
constantes, autnoma y homognea. Utilizando el software Mathematica 4.0, su
solucin ser:
In[1]:= eq1 =y'@tD- HHsvL* y@tDL
Out[1]= -
s y@tD
v
+y
@tD
In[2]:= a =DSolve@8eq1 0, y@0D yo<, y@tD, tD
Out[2]= : : y@tD
st
v
yo>>
( )
t s
0
e y t y (38)
Grficamente, la trayectoria del ingreso puede representarse asumiendo
valores para los parmetros. El grfico 5 contiene la mencionada senda y su campo
vectorial, considerando 8 . 0 v 1 . 0 s y los siguientes valores iniciales del
ingreso 3 , 2 , 1 , 1 . 0 Y
0
.
In[3]:= y@t_D=y@tD. a;
g@t_D=y@tD. 8yo 1, s 0.1, v 0.8<;
graph1 =Plot@g@tD, 8t, 0, 10<D
In[6]:= h@t_D=y@tD. 8yo 2, s 0.1, v 0.8<;
graph2 =Plot@h@tD, 8t, 0, 10<D
In[8]:= j@t_D=y@tD. 8yo 3, s 0.1, v 0.8<;
graph3 =Plot@j@tD, 8t, 0, 10<D
20
In[10]:= k@t_D=y@tD. 8yo 0.1, s 0.1, v 0.8<;
graph4 =Plot@k@tD, 8t, 0, 10<D
In[12]:= <<Graphics`PlotField`
arrows =PlotVectorField@81, 0.1 0.8 * w * p p<, 8p, 0.01, 10<, 8w, 0, 5<D
Show@8graph1, graph2, graph3, graph4, arrows<, AxesLabel 8"t", "yHtL"<,
PlotRange80, 5<D
2 4 6 8 10
t
1
2
3
4
5
yHtL
Reordenando convenientemente la ecuacin (37), se obtiene la tasa de
crecimiento del ingreso como:
v
s
Y
' Y
(39)
Una constante con respecto al tiempo que puede graficarse utilizando los siguientes
comandos:
In[15]:= Plot@0.10.8, 8t, 0, 10<, AxesLabel 8"t", "y'y"<D
2 4 6 8 10
t
0.05
0.1
0.15
0.2
0.25
y'y
A partir de esta formulacin, mayores tasas de ahorro incrementan la masa de
recursos disponibles para la inversin y, dado el equilibrio ahorro-inversin,
Grfico 5. Campo vectorial del modelo Harrod-Domar
Grfico 6. Tasa de crecimiento del ingreso
21
permiten alcanzar un mayor nivel de ingreso de la economa. Una aplicacin de este
corolario puede realizarse suponiendo la existencia de dos pases A y B, que parten
de similares condiciones iniciales pero poseen distintas tasas de ahorro, 0.2 y 0.1
respectivamente.
In[13]:= y@t_D=y@tD. a;
PaisA@t_D=y@tD. 8yo 1, s 0.2, v 0.8<;
PaisB@t_D=y@tD. 8yo 1, s 0.1, v 0.8<;
Plot@8PaisA@tD, PaisB@tD<, 8t, 0, 10<, AxesLabel 8"t", "yHtL"<, PlotRange 80, 10<,
Epilog 8Text@"s1", 87, 1.5<D, Text@"s2", 87, 7<D, Text@"s1<s2", 83, 7<D<D
2 4 6 8 10
t
2
4
6
8
10
yHtL
PaisB
PaisA s1 <s2
4. Modelo de Solow
El modelo de crecimiento de Solow representa una economa cuyo equilibrio
implica un capital y produccin per cpita constantes en el tiempo. La dinmica
hacia este estado estacionario se plantea como un caso tpico de ecuaciones
diferenciales de primer orden, no lineales, homogneas y autnomas.
La formulacin original supone una economa cerrada donde el ahorro es
funcin del ingreso e igual a la inversin. A su vez, esta ltima se presenta como
la acumulacin de capital junto con la cantidad necesaria para cubrir las
depreciaciones:
) t ( K ) t ( ' K ) t ( I ) t ( sY ) t ( S + , 1 s , 0 < < (40)
Suponiendo una funcin del tipo Cobb-Douglas con dos factores de produccin,
capital y trabajo, y rendimientos constantes a escala, se obtiene:
( ) ( ) [ ]
1
) t ( L ) t ( K A t L , t K F A ) t ( Y , 1 0 < < (41)
Dada la caracterstica de la funcin en (41), se puede determinar la relacin
de produccin per cpita de la siguiente manera:
Grfico 7. Sendas de crecimiento con distintas tasas de ahorro
22
[ ] [ ]
) t ( k A ) t ( k f 1 , ) t ( L / ) t ( K F A
) t ( L
) t ( Y
) t ( y (42)
donde ) t ( L / ) t ( K ) t ( k es el nivel de capital per cpita. Con (40), (41) y (42) se
obtiene:
[ ] ) t ( k
) t ( L
) t ( ' K
) t ( k f s + (43)
el primer trmino del segundo miembro en (43) se puede expresar como:
) t ( L
) t ( ' L
) t ( k ) t ( ' k
) t ( L
) t ( ' K
+ (44)
Asumiendo una tasa de crecimiento de la poblacin es constante, positiva e
igual a n, se combinan (42), (43) y (44) para encontrar la ecuacin diferencial que
resume la dinmica del capital:
) t ( k ) n ( ) t ( Ak s ) t ( ' k +
(45)
Para encontrar la senda del capital en el tiempo, se resuelve la ecuacin
(45), no-lineal en k(t), utilizando una sustitucin de variables.
In[1]:= Clear@A, t, x, y, v, k, a, f, s, d, n, rD
f@k_D=A* k^a
Out[2]= A k
a
In[3]:= eq1 =k'@tD- s* f@k@tDD+Hn +dL* k@tD
Out[3]= Hn+dL k@tD- A s k@tD
a
+k
@tD
In[4]:= eq2 =v'@tD+Hn+dL* H1 - aL* v@tD- s* H1 - aL* A
Out[4]= - A s H1 - aL +H1 - aL Hn +dL v@tD+v
@tD
] t [ v ) n ( ) 1 ( ) 1 ( s A ] t [ ' v + (46)
Al definir a
1
) t ( k ) t ( v en (46), la ecuacin diferencial no lineal que
resuelve la dinmica del capital en (45), se convierte en una ecuacin lineal
autnoma y no homognea. Al resolverla, para la condicin inicial
1
ko ) 0 ( v , se
obtiene la solucin de la ecuacin diferencial.
In[5]:= sol =DSolve@8eq2 0, v@0D ko^H1 - aL<, v@tD, tDSimplify;
k@t_D=v@tD^H1H1- aLL . sol
Out[6]= :
i
k
ko
- a
HA ko
a
s +
tH- 1+aL Hn+dL
H- A ko
a
s +ko Hn +dLLL
n+d
y
{
1
1- a
>
( )( )
( ) ( ) [ ]
+
'
+
+ + +
1
1
n 1 t
n
n ko s Ako e s Ako ko
) t ( k (47)
23
La expresin (47) establece la senda del capital a lo largo del tiempo y,
partiendo de diferentes valores iniciales de ko, se obtienen trayectorias
alternativas. A modo ilustrativo, el grfico 8 representa algunas de ellas. Los
parmetros utilizados asumen los siguientes valores:
1 . 0 , 3 . 0 n , 4 . 0 s , 7 . 0 , 1 A
In[7]:= k1@t_D=k@tD. 8a 0.7 , s 0.4 , n .3, d.1, A 1<
Out[7]= 921.2064
i
k
- 0.12t
H- 0.4 ko
0.7
+0.4 koL +0.4 ko
0.7
ko
0.7
y
{
3.33333
=
In[8]:= trajectories1 =Table@k1@tD. ko 80.2, 0.8, 1, 2, 4<D;
plottraj1 =Plot@Evaluate@trajectories1D, 8t, 0, 10<, PlotRange 80, 5<,
PlotStyle 88<, 8<, Dashing@80.015<D, 8<, 8<<, AxesLabel 8"t", "kHtL"<D
2 4 6 8 10
t
1
2
3
4
5
kHtL
Se verifica, adems, la convergencia hacia el estado estacionario para el
capital ( 1 K
*
) ante diferentes condiciones iniciales. Analticamente, esto se
puede comprobar tomando lmite a las soluciones, para t que tiende a infinito.
In[10]:= limite =Limit@trajectories1, t InfinityD
Out[10]= 881., 1., 1., 1., 1.<<
El factor clave que determina estabilidad en la trayectoria (47) es la
productividad del capital en la funcin de produccin. Mientras existan rendimientos
marginales decrecientes, se garantiza la convergencia. Esto se deduce a partir de:
( )( )
( ) 0 1 0 e lim
n 1 t
t
>
+
Una vez obtenida la solucin para el capital, se pueden encontrar, por (40) y
(41), las respectivas soluciones para el producto, inversin y consumo.
In[11]:= Clear@y, iD
Grfico 8. Capital a lo largo del tiempo
24
In[12]:= y@t_D=A * k1@tD^ a . 8A 1, a 0.7 , ko 2<
i@t_D=D@k1@tD, tD+Hn +dL* k1@tD. 8n 0.3 , d0.1 , ko 2<
c@t_D=y@tD- i@tD
Out[12]= 92.73429 I H0.649802 +0.150198
- 0.12t
L
3.33333
M
0.7
=
Out[13]= 9- 0.252806 2.71828
- 0.12t
H0.649802 +0.150198 2.71828
- 0.12t
L
2.33333
+
1.68315 H0.649802+0.150198 2.71828
- 0.12t
L
3.33333
=
Out[14]= 90.252806 2.71828
- 0.12t
H0.649802 +0.150198 2.71828
- 0.12t
L
2.33333
-
1.68315 H0.649802+0.150198 2.71828
- 0.12t
L
3.33333
+
2.73429 I H0.649802 +0.150198
- 0.12t
L
3.33333
M
0.7
=
In[15]:= plottraj2 =Plot@8y@tD, i@tD, c@tD<, 8t, 0, 15<, PlotRange 80, 2<,
AxesLabel 8"t", "yHtL,iHtL,cHtL"<,
Epilog 8Text@"yHtL", 815.5, 1.15<D, Text@"iHtL", 815.5, 0.45<D,
Text@"cHtL", 815.5, 0.7<D<D
2 4 6 8 10 12 14
t
0.25
0.5
0.75
1
1.25
1.5
1.75
2
yHtL,iHtL,cHtL
yHtL
iHtL
cHtL
In[16]:= limite2 =Limit @8y@tD, i@tD, c@tD<, t Infinity D
Out[16]= 881.<, 80.4<, 80.6<<
Alternativamente, la dinmica de una variable se analiza a partir de su
diagrama de fase, en este caso, la representacin de la direccin que toma el
capital desde diferentes puntos iniciales. El grfico 10 muestra el comportamiento
de la variable desde esa perspectiva. Claramente, partiendo de cualquier punto tal
que K > 0, esta variable se dirige hacia el estado estacionario.
Grfico 9. Producto, inversin y consumo
Grfico 10. Diagrama de fase
0 1 2 k(t)
25
Tambin se puede obtener una ayuda visual de la dinmica del modelo en un
diagrama que vincule a k(t) como funcin de k(t). La ecuacin (45) determina esta
relacin no lineal, representada en el grfico 11.
In[17]:= kprima @k_D=0.4 * k ^ 0.7 - H.1 +.3L * k;
Plot @kprima @kD, 8k, 0, 1.5 <, PlotRange 8- 0.1 , 0.06 <,
AxesLabel 8"kHtL", "k'HtL"<, Epilog 8Text @"k'HkL", 81.25 , - 0.075 <D,
Text @"ke=0", 80.125 , 0.015 <D, Text @"ke=1", 81.05 , 0.015 <D<D
0.2 0.4 0.6 0.8 1 1.2 1.4
kHtL
-0.1
-0.08
-0.06
-0.04
-0.02
0.02
0.04
0.06
k'HtL
k'HkL
ke=0 ke=1
Existen dos puntos donde k= 0. Cuando el capital es igual a cero (punto que
no se tiene en cuenta en el anlisis) y cuando asume el valor de uno. En este ltimo
caso, la pendiente de la curva k(k) es negativa, condicin para la estabilidad
local de ese equilibrio.
Para alcanzar algebraicamente este estado estacionario, se iguala el segundo
miembro de la ecuacin diferencial no lineal que resuelve la dinmica del capital
(45) a cero. Luego de algunos pasos algebraicos, se obtiene:
,
_
1
1
*
n
A s
k (48)
Suponiendo los valores definidos para cada uno de los parmetros, el nivel de
k* es igual a 1, valor tambin obtenido al tomar lmite a la solucin para t que va
a infinito. Precisamente, k* es un equilibrio estable al ser alcanzado desde
cualquier condicin inicial.
Por ltimo, la dinmica del capital se observa a travs del diagrama
produccin-capital. En l se muestra cmo una cantidad mayor (menor) al nivel de
estado estacionario, hace que se desacumule (acumule) ms capital va mayor (menor)
inversin neta, hasta hacer que el ahorro cubra slo el gasto necesario para la
depreciacin y el crecimiento de la poblacin (n + ). El grfico 12 presenta este
diagrama.
Grfico 11. k(t) VS k(t)
26
In[19]:= Clear @A, t, x, k, a, s, d, n, rD
gg@k_D=A k^ a;
ss@k_D=s * gg@kD;
ee@k_D=Hn +dL* k;
In[23]:= 8gdp @k_D, sav @k_D, expend @k_D<=8gg@kD, ss@kD,
ee@kD<. 8A 1, a 0.7, s 0.4 , n 0.3 , d0.1 <
Out[23]= 8k
0.7
, 0.4k
0.7
, 0.4 k<
In[24]:= <<Graphics`Arrow` ;
In[25]:= graf1 =Plot@8gdp@kD, sav@kD, expend@kD<, 8k, 0, 2<, AxesLabel 8"k", "y"<,
PlotRange 80, 1<, PlotStyle 8Dashing@80.015<D, 8<, 8<<,
Epilog 8Arrow@80.5, 0<, 80.85, 0<D, Arrow@80.5, 0<, 80.65, 0<D,
Arrow@81.5, 0<, 81.35, 0<D, Arrow@81.5, 0<, 81.15, 0<D,
Text@"k'=0", 81, 0.5<, 80, 0.6<D, Text@"fHkL", 81, 0.92<, 80, 0.6<D,
Text@"s*fHkL", 82, 0.55<, 80, 1<D, Text@"Hn+dL*k", 82, 0.92<, 80, 0.6<D,
PointSize@0.02D, Point@81, 0.4<D<D;
0.5 1 1.5 2
k
0.2
0.4
0.6
0.8
1
y
k'=0
fHkL
s*fHkL
Hn+dL*k
4.1 La Regla de Oro
3
La teora de crecimiento en lnea con el modelo de Solow propone, como regla
de poltica, la maximizacin del consumo en el tiempo. La consecucin de este
objetivo plantea dos interrogantes. Primero, saber cul es el nivel de capital que
maximiza el consumo. Segundo, cmo hacer que ese nivel de k(t) permanezca en el
tiempo.
El primero de los problemas puede resolverse fcilmente como un ejercicio de
optimizacin clsico:
) t ( k ) n ( ) t ( ' k ) t ( k A ) t ( i ) t ( y ) t ( c Max
) t ( k
+
(49)
3
El nombre fue ideado por Edmund Phelps en 1961.
Grfico 12. y(t) vs k(t)
27
Teniendo en cuenta que se parte desde un estado estacionario, k(t) = 0 en (49). Por
lo tanto, de la condicin de primer orden, se llega a:
In[26]:= kgrule =k . Solve@D@f@kD, kD- Hn +dL 0, kD
Out[26]= : J
n +d
A a
N
1
- 1+a
>
,
_
1
1
n
A
) t ( kgrule (50)
Al valuar a kgrule(t) con los parmetros asumidos, se puede verificar que no
representa un equilibrio dinmico y, por lo tanto, no se sostendr en el tiempo. La
tarea a realizar es modificar los parmetros disponibles, de manera que kgrule(t)
sea un estado estacionario. Se supondr a la tasa de ahorro (s) como nica variable
de poltica. Recordando a qu es igual k*(t) por (48), se puede encontrar s*:
In[27]:= seest@k_D=s . Solve@ss@kD- ee@kD 0, sD
Out[27]= :
k
1- a
Hn+dL
A
>
( )
+
1
* * *
k
A
) n (
) k ( s (51)
Valuando a s* para el kgrule(t) definido anteriormente, se obtiene la tasa de
ahorro de estado estacionario que maximiza el consumo (de regla de oro).
In[28]:= sgrule =seest@kgruleD Simplify
Out[28]= : :
Hn +dL
i
k
I
n+d
Aa
M
1
- 1+a
y
{
1- a
A
>>
1
1
1
]
1
,
_
+
+
1
1
1
*
n
A
A
) n (
) kgrule ( s (52)
Una vez determinado el nuevo valor para s, es posible observar el efecto
sobre la trayectoria del consumo antes y despus del ajuste. Para ello, se supondr
que la economa se mantiene en el estado estacionario anterior (k* = 1), hasta que
en t = 3, se lleva a cabo una poltica que modifica la tasa de ahorro. Manteniendo
los valores de los dems parmetros, se obtiene, por (48) y (52):
45843 . 6
n
sgrule
grule k ; 7 . 0 sgrule
1
1
*
,
_
+
Se calcula la nueva trayectoria del capital, producto, inversin y consumo
respectivamente.
28
In[29]:= sol =DSolve@8eq2 0, v@3D ko^H1 - aL<, v@tD, tDSimplify;
k1@t_D=v@tD^H1H1- aLL . sol
Out[30]= :
i
k
- 3H- 1+aL Hn+dL
ko
- a
HA
3H- 1+aL Hn+dL
ko
a
s +
tH- 1+aL Hn+dL
H- A ko
a
s +ko Hn +dLLL
n+d
y
{
1
1- a
>
In[31]:= k1@t_D=k1@tD. 8a 0.7 , n .3, d.1, A 1, ko 1, s 0.7 <
Out[31]= 970.4077 H0.488373- 0.3
- 0.12t
L
3.33333
=
In[32]:= y1@t_D=A * k1@tD^ a . 8A 1, a 0.7 < Simplify
i1@t_D=D@k1@tD, tD+Hn +dL* k1@tD. 8n 0.3 , d0.1 < Simplify
c1@t_D=y1@tD- i1@tD Simplify
Out[32]= 919.6487 I H0.488373- 0.3
- 0.12t
L
3.33333
M
0.7
=
Out[33]= 98.44892
- 0.12t
H0.488373 - 0.3
- 0.12t
L
2.33333
+28.1631 H0.488373- 0.3
- 0.12t
L
3.33333
=
Out[34]= 9- 8.44892
- 0.12t
H0.488373 - 0.3
- 0.12t
L
2.33333
-
28.1631 H0.488373- 0.3
- 0.12t
L
3.33333
+19.6487 I H0.488373 - 0.3
- 0.12t
L
3.33333
M
0.7
=
El grfico 13 muestra la trayectoria del consumo a lo largo del tiempo,
visualizando el comportamiento de esta variable al momento de aplicar la poltica en
favor del ahorro (para t = 3).
In[35]:= plottraj3 =Plot @c1@tD, 8t, 3, 25<, PlotRange 880, 25<, 80, 1.25 <<,
AxesLabel 8"t", "cHtL"<, Epilog 8Line @880, 0.6<, 83, 0.6 <<D,
Text @"cHtL", 815.5 , 0.95 <D, Dashing @80.01 , 0.02 <D,
Line @883, 0.6 <, 83, 0.3 <<D, Line @880, 1.10716 <, 825, 1.10716 <<D<D
5 10 15 20 25
t
0.2
0.4
0.6
0.8
1
1.2
cHtL
cHtL
Tomando lmites a cada una de las trayectorias, se encuentran los nuevos
niveles de produccin, consumo e inversin de estado estacionario.
In[36]:= Limit @8y1@tD, c1@tD, i1@tD<, t Infinity D
Out[36]= 883.69053<, 81.10716<, 82.58337<<
Grfico 13. Trayectoria de c(t) hacia la regla de oro
29
58337 . 2 1 i ; 10716 . 1 1 c ; 69053 . 3 1 y
* * *
Puede observarse como, a pesar de que el consumo en el largo plazo ser mayor
que antes (de 0.6 a 1.10716); se genera un costo para las generaciones inmediatas
posteriores (en 3 < t < 8 aproximadamente). Estas vern disminuido su consumo a
costa de que sus descendientes (generaciones para t > 8) obtengan niveles superiores
al alcanzado en el estado original (t < 3).
4.2 El nivel de capital, produccin y consumo agregado.
Hasta ahora, el anlisis se ha avocado a describir el comportamiento del
capital per cpita. Para conocer la dinmica de esta variable a nivel agregado, se
debe recurrir a la relacin k(t) = K(t)/L(t). Recordando que L(t) crece a una tasa
constante e igual a n, se obtiene
4
:
t n
e Lo ) t ( k ) t ( L ) t ( k ) t ( K (53)
suponiendo Lo = 1,
t n
e ) t ( k ) t ( L ) t ( k ) t ( K (54)
De la expresin (54) puede deducirse que K(t) no converge hacia un nivel
determinado, sino que crece cada vez ms a medida que el tiempo transcurre. Tomando
lmite se llega a:
[ ] 0 n e lim k ) t ( K lim
t n
t
*
t
>
Por otro lado, definiendo a la tasa de crecimiento como la derivada respecto
al tiempo del logaritmo de (54):
[ ] [ ] t n ) t ( k ln ) t ( K ln +
[ ]
n
k
) t ( ' k
) t ( K
) t ( ' K
dt
) t ( K ln d
+ (55)
La expresin (55) muestra como la tasa de crecimiento de K(t) en estado
estacionario es positiva e igual a n. Esto se deduce por cuanto k(t) = 0 en ese
punto. Se puede demostrar utilizando las ecuaciones (40) y (41) que la produccin y
el consumo agregado tambin crecen a la tasa n.
n
) t ( C
) t ( ' C
) t ( Y
) t ( ' Y
) t ( K
) t ( ' K
Resulta interesante resaltar que, an a pesar de que Y(t) crezca a la tasa n
en el estado estacionario, la dinmica de corto plazo puede ser diferente. Para
observar este fenmeno, se retorna a la situacin anterior, donde en un punto del
tiempo (t = 3), cambia uno de los parmetros del modelo (aumenta la tasa de ahorro)
para maximizar el consumo (regla de oro).
4
A la expresin (14) se llega luego de resolver la ecuacin diferencial L(t)/L(t) = n
30
Partiendo del estado estacionario inicial con y* = 1 (dado k* = 1), se eleva
la tasa de ahorro, modificando el nivel de capital y produccin de largo plazo (el
nuevo estado estacionario ser mayor que el anterior). Ahora y1* ; k1* llegan a 3.69
y 6.46 respectivamente.
In[37]:= Y@t_D=Exp @n * tD. 8n 0.3 <;
lnY @t_D=PowerExpand @Log @Y@tDDD
Out[38]= 0.3 t
In[39]:= Limit @8y1@tD, k1@tD<, t Infinity D
Out[39]= 883.69053<, 86.45843<<
In[40]:= Y2@t_D=3.6905303420183193 * Exp @n * tD. 8n 0.3 <;
lnY2 @t_D=PowerExpand @Log @Y2@tDDD
Out[41]= 1.30577 +0.3 t
In[42]:= Y1@t_D=y1@tD* Exp @n * tD. 8n 0.3 <;
lnY1 @t_D=PowerExpand @Log @Y1@tDDD
Out[43]= 82.97801 +0.3 t +2.33333Log@0.488373 - 0.3
- 0.12t
D<
El grfico 14 vincula el logaritmo natural de Y(t) contra el tiempo, siendo
el ms apropiado en este caso porque las pendientes de las curvas representan las
tasas de crecimiento.
In[44]:= plottraj4 =Plot @lnY @tD, 8t, 0, 3<, DisplayFunction Identity D;
plottraj6 =Plot @lnY1 @tD, 8t, 3, 15<, DisplayFunction Identity D;
Show @8plottraj4 , plottraj6 <, PlotRange 880, 17<, 80, 5.6 <<,
AxesLabel 8"t", "lnY HtL"<,
Epilog 8Dashing @80.015 <D, Line @883, 0.9 <, 89, 2.7 <<D,
Line @880, 1.3057767 <, 816, 4.8 +1.3057767 <<D, Text @"lnY1 HtL", 816.4 , 5.35 <D,
Text @"Pendiente = n", 810, 2<D, Text @"Pendiente = n", 83, 3<D,
Text @"Pendiente > n", 814.5 , 4.25 <D<,
DisplayFunction $DisplayFunction D
2.5 5 7.5 10 12.5 15
t
1
2
3
4
5
lnY HtL
lnY1 HtL
Pendiente = n
Pendiente = n
Pendiente > n
Grfico 14. La tasa de crecimiento del producto
31
Queda claro que ante un shock positivo en la tasa de ahorro, el producto per
cpita de estado estacionario se eleva (y1* > y*). De esta manera, para alcanzar ese
nuevo nivel, la tasa de crecimiento de Y(t) debe ser mayor que la de la poblacin
(n). Es por este motivo que la pendiente de lnY1(t) se eleva desde t = 3 y luego va
convergiendo nuevamente hacia n.
5. Comentarios finales
El objetivo del presente ensayo fue integrar los principios matemticos y
econmicos con comandos computacionales bsicos para resolver ecuaciones
diferenciales. Para cumplirlo, se procedi a realizar una revisin terica sobre el
tema y ejercitaciones con un software adecuado.
A partir de este instrumental matemtico e informtico, se estudiaron en
profundidad dos aplicaciones relacionadas la teora del crecimiento econmico: el
modelo Harrod-Domar y el modelo clsico de Solow. Se reconocieron as las ventajas y
posibilidades del software Mathematica 4.0, cumpliendo los objetivos inicialmente
propuestos.
6. Referencias Bibliogrficas
Beare, John. Macroeconomics: Cycles, Growth and Policy in a Monetary Economy. New
York: Mac Millan, 1978.
Crooke, Philip S. y Cliff J. Huang. Mathematics and Mathematica for Economists.
Oxford: Blackwell Publishers, 1997.
Sala-i-Martin, Xavier. Apuntes de Crecimiento Econmico. Barcelona: Antoni Bosch,
2000.
Simon, Carl y Lawrence Blume. Mathematics for Economists. London: W. W. Norton &
Company, Inc., 1994.
Shone, Ronald. Economic Dynamics. Cambridge: Cambridge University Press, 1997.
7. Apndice
Se comprobar el caso de races reales y repetidas para 2 k n . Suponiendo
la ecuacin:
0 cy y b y a
' ' '
+ + (a.1)
el polinomio resulta:
0 c r b r a ) r ( P
2
+ + (a.2)
Para que el polinomio posea dos races reales e iguales a r*, debe verificarse:
32
c a 4 b
2
(a.3)
El valor de r* es:
a 2
b
* r (a.4)
El conjunto C tendr dos elementos:
{ } { }
t ) a 2 / b ( t ) a 2 / b (
2 1
e t , e y , y C
(a.5)
y debe comprobarse que estas expresiones realmente son soluciones de la ecuacin
diferencial (a.1). La primera de ellas no presenta complicaciones para su
demostracin. Algebraicamente:
t ) a 2 / b (
1
e y
t ) a 2 / b (
'
1
e ) a 2 / b ( y
t ) a 2 / b (
2
2
t ) a 2 / b ( 2
' '
1
e
a 4
b
e ) a 2 / b ( y
Una vez derivada sucesivamente a la solucin encontrada, se sustituyen estas
relaciones en la ecuacin diferencial para comprobar que la satisfacen.
( ) 0 e c e
a 2
b
b e
a 4
b
a
t ) a 2 / b ( t ) a 2 / b ( t ) a 2 / b (
2
2
+
,
_
,
_
0 c
a 2
b
a 4
b
e
2 2
t ) a 2 / b (
,
_
0 c
a 4
b
2
a 4
b
2 2
,
_
+
0 c
a 4
b
2
+ (a.6)
De (a.3) surge:
a 4
b
c
2
(a.7)
con (a.7) en (a.6):
0
a 4
b
a 4
b
2 2
,
_
+
Queda demostrado que
t ) a 2 / b (
1
e y
es solucin de la ecuacin diferencial. La
clave es estudiar la segunda de las expresiones y comprobar que tambin satisface
(a.1). Se proceder con igual metodologa que para el caso de y
1
. Algebraicamente:
t ) a 2 / b (
2
e t y
,
_
+
a 2
b
t 1 e e ) a 2 / b ( t e y
t ) a 2 / b ( t ) a 2 / b ( t ) a 2 / b (
'
2
33
,
_
,
_
+
a 2
b
t 1 e ) a 2 / b ( e ) a 2 / b ( y
t ) a 2 / b ( t ) a 2 / b (
' '
2
Extrayendo factor comn:
,
_
+
t
a 4
b
a
b
e y
2
2
t ) a 2 / b (
' '
2
Reemplazando en la ecuacin diferencial:
0 t c t
a 2
b
1 b t
a 4
b
a
b
a e
2
2
t ) a 2 / b (
,
_
+
,
_
,
_
Efectuando la propiedad distributiva, simplificando y reemplazando al parmetro c
segn (28) se tiene:
0 t
a 4
b
t
a 4
b
2 t
a 4
b
2 2 2
,
_
+
La relacin es satisfecha, con lo cual puede afirmarse que la expresin
t ) a 2 / b (
2
e t y
es una solucin de la ecuacin diferencial.
Resta comprobar que sean LI, para poder aplicar el Principio de Superposicin. El
determinante W ser:
,
_
,
_
a 2
b
t
a 2
b
t 1 e
a 2
b
t 1 e e ) a 2 / b (
e t e
W
t ) a / b (
t ) a 2 / b ( t ) a 2 / b (
t ) a 2 / b ( t ) a 2 / b (
0 e W
t ) a / b (
(a.8)
Siendo las soluciones LI, la solucin general resulta:
t ) a 2 / b (
2
t ) a 2 / b (
1
e t c e c ) t ( y
+ (a.9)
You might also like
- Manual FORODocument4 pagesManual FOROjavier oxolonNo ratings yet
- Modelo de ProyectoDocument1 pageModelo de Proyectojavier oxolonNo ratings yet
- Ladrillera InfoDocument103 pagesLadrillera Infojavier oxolon100% (1)
- Anexo 7 Diagrama de FlujosDocument6 pagesAnexo 7 Diagrama de Flujosjavier oxolonNo ratings yet
- Incremento Disponibilidad de MáquinasDocument24 pagesIncremento Disponibilidad de Máquinasjavier oxolonNo ratings yet
- Referencias BibliograficasDocument2 pagesReferencias Bibliograficasjavier oxolonNo ratings yet
- Trabajo Caso AvonDocument24 pagesTrabajo Caso Avonjavier oxolonNo ratings yet
- Manual - Tav - EstudianteDocument7 pagesManual - Tav - Estudiantejavier oxolonNo ratings yet
- Datos InformativosDocument8 pagesDatos Informativosjavier oxolonNo ratings yet
- Procesos Necesarios para La Elaboración de La PoleaDocument20 pagesProcesos Necesarios para La Elaboración de La PoleaEduardo Moreno80% (5)
- Trabajo Colaborativo 1 Procesos de Manufactura UnadDocument14 pagesTrabajo Colaborativo 1 Procesos de Manufactura Unadjavier oxolonNo ratings yet
- @@memoriaDocument87 pages@@memoriajavier oxolonNo ratings yet
- Cadena de SuministrosDocument42 pagesCadena de Suministrosjavier oxolonNo ratings yet
- Manual - Tav - EstudianteDocument7 pagesManual - Tav - Estudiantejavier oxolonNo ratings yet
- Día Del Agua y DíaDocument6 pagesDía Del Agua y Díajavier oxolonNo ratings yet
- C1 Caso Muebles FinosDocument2 pagesC1 Caso Muebles Finosjavier oxolon100% (1)
- Silabo Gest Cad de SumDocument8 pagesSilabo Gest Cad de Sumjavier oxolonNo ratings yet
- ClaseDocument33 pagesClasejavier oxolonNo ratings yet
- Datos InformativosDocument8 pagesDatos Informativosjavier oxolonNo ratings yet
- Normas Apa 2015Document21 pagesNormas Apa 2015Anastacio Sandalia Saliva81% (31)
- ProyectodetesisDocument36 pagesProyectodetesisjavier oxolonNo ratings yet
- C1 Caso Muebles FinosDocument2 pagesC1 Caso Muebles Finosjavier oxolon100% (1)
- Rubrica Foro Debate Ges Cad SumDocument1 pageRubrica Foro Debate Ges Cad Sumjavier oxolonNo ratings yet
- Guia Foro Deb y Arg Ges Cad SumDocument3 pagesGuia Foro Deb y Arg Ges Cad Sumjavier oxolonNo ratings yet
- Tesis2 REDUCCION DE MERMASDocument192 pagesTesis2 REDUCCION DE MERMASjavier oxolon100% (2)
- Ejemplo GanttDocument12 pagesEjemplo Ganttjavier oxolonNo ratings yet
- Guia y Rubrica Trabajo IndividualDocument5 pagesGuia y Rubrica Trabajo Individualjavier oxolonNo ratings yet
- Silabo 2015 IDocument9 pagesSilabo 2015 Ijavier oxolonNo ratings yet
- Cronograma ActividadesDocument2 pagesCronograma Actividadesjavier oxolonNo ratings yet
- Proyecto Reduccion de MermasDocument2 pagesProyecto Reduccion de Mermasjavier oxolonNo ratings yet
- Oficio n01 - Solicitud de PronunciamientoDocument2 pagesOficio n01 - Solicitud de PronunciamientoLenin YamirNo ratings yet
- Contexto de La Organización ISO 9001 e ISO 14001Document8 pagesContexto de La Organización ISO 9001 e ISO 14001Andres NicolasNo ratings yet
- Fci Pionero FFDocument1 pageFci Pionero FFJhonny GiulianoNo ratings yet
- Examen Final de Quimica IIDocument5 pagesExamen Final de Quimica IIRenato ProleonNo ratings yet
- Sistema RespiratorioDocument2 pagesSistema Respiratoriopaolufjfkfkjfjfjfjrja reyes saldañaNo ratings yet
- Plan de MarketingDocument35 pagesPlan de MarketingSTAT CHILE AMERICANo ratings yet
- Matriz de Peligros Informe Hoffman Arnulfo Melo Castro Corregida.Document41 pagesMatriz de Peligros Informe Hoffman Arnulfo Melo Castro Corregida.jas_consaludNo ratings yet
- SCIU-154 - Entregable 01Document8 pagesSCIU-154 - Entregable 01carlosNo ratings yet
- Boletin 100 Del Consejo de EstadoDocument49 pagesBoletin 100 Del Consejo de EstadoencuentroredNo ratings yet
- Principios de Instrumentacion IndustrialDocument8 pagesPrincipios de Instrumentacion IndustrialFelipe ApazaNo ratings yet
- Caso Douglas S.ADocument4 pagesCaso Douglas S.AMerly Celeste Ramos PardaveNo ratings yet
- Tarea ERNESTO VELASQUEZCALDERONDocument2 pagesTarea ERNESTO VELASQUEZCALDERONErnesto velasquez calderonNo ratings yet
- Actividad de Aprendizaje 2 - Instalación y Comienzos de Sistema GestorDocument6 pagesActividad de Aprendizaje 2 - Instalación y Comienzos de Sistema GestorSergio CepedaNo ratings yet
- Probabilidad Conjunta Ejercicios ResueltosDocument22 pagesProbabilidad Conjunta Ejercicios ResueltosJosé Vivanco NúñezNo ratings yet
- El Equipo FotográficoDocument5 pagesEl Equipo FotográficoSebastian Sanchez BarriosNo ratings yet
- Exposicion TH 040Document18 pagesExposicion TH 040Sebastian Pedraza RamirezNo ratings yet
- Dibujo Técnico ArquitectónicoDocument9 pagesDibujo Técnico ArquitectónicoRaymar RomeroNo ratings yet
- GUIA No 2Document5 pagesGUIA No 2Liz CulmaNo ratings yet
- Sector CircularDocument3 pagesSector CircularSebastian Alonso Sosa Perreira0% (1)
- Formato Prescripcion Personas MoralesDocument2 pagesFormato Prescripcion Personas MoralesGerko ManriqueNo ratings yet
- Ga-1552 Sandra Magalon MLR60 Exportacion-1Document1 pageGa-1552 Sandra Magalon MLR60 Exportacion-1sya2501No ratings yet
- Ficha TecnicaDocument2 pagesFicha TecnicaSilvia Roxana Quisihualpa CarrascoNo ratings yet
- 1° - Fichas LectoescrituraDocument204 pages1° - Fichas LectoescrituraRosiNo ratings yet
- Consumidor Capitulo 3Document15 pagesConsumidor Capitulo 3Denise CANo ratings yet
- Axiomas de Los Números RealesDocument9 pagesAxiomas de Los Números RealesAMYNNXXXXNo ratings yet
- Decreto Dejar Sin Efecto AvocaciónDocument1 pageDecreto Dejar Sin Efecto AvocaciónTransparencia Local ÚbedaNo ratings yet
- Tabla de Unidades SIMELADocument2 pagesTabla de Unidades SIMELAfernando benottiNo ratings yet
- Tercera OpiniónDocument14 pagesTercera OpiniónEmeterio RivasNo ratings yet
- Iq2009 0002 0002Document150 pagesIq2009 0002 0002EfrainFelicesQuichcaNo ratings yet
- Decreto 8587 To Ley Regularizacion Control Arrendamientos Vivienda 14-11-11Document35 pagesDecreto 8587 To Ley Regularizacion Control Arrendamientos Vivienda 14-11-11andres.rafael.carrenoNo ratings yet