You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Poka Yoke BDocument31 pagesPoka Yoke BjaymuscatNo ratings yet
- Installation Guide of DAS Xentry 01 - 2014Document2 pagesInstallation Guide of DAS Xentry 01 - 2014pablodanielrigo100% (2)
- PS0500 Service ManualDocument33 pagesPS0500 Service Manualmoussa77% (13)
- Project On SamsungDocument39 pagesProject On SamsungAbbas0% (1)
- Ultrasonic TransducersDocument23 pagesUltrasonic Transducerspablodanielrigo100% (2)
- SCM NotesDocument29 pagesSCM NotesNisha Pradeepa100% (2)
- Marcel Breuer: Hungarian-American Designer, Architect and Bauhaus PioneerDocument8 pagesMarcel Breuer: Hungarian-American Designer, Architect and Bauhaus PioneerYosaphat Kiko Paramore DiggoryNo ratings yet
- 10 KW Conversor de IonosferaDocument4 pages10 KW Conversor de Ionosferapablodanielrigo100% (1)
- Laude vs. Ginez-Jabalde (MCLE)Document29 pagesLaude vs. Ginez-Jabalde (MCLE)Justin CebrianNo ratings yet
- Barcelona Traction Case DigestDocument3 pagesBarcelona Traction Case DigestCheCheNo ratings yet
- CAN BusDocument9 pagesCAN Buspablodanielrigo100% (2)
- Introduction To Management: Planning & Goal SettingDocument31 pagesIntroduction To Management: Planning & Goal SettingMaisarah NorzihanNo ratings yet
- Cost Analysis Format-Exhaust DyeingDocument1 pageCost Analysis Format-Exhaust DyeingRezaul Karim TutulNo ratings yet
- OilField Review 2016 Cement EvaluationDocument10 pagesOilField Review 2016 Cement EvaluationLuisNo ratings yet
- Activation InstructionsDocument6 pagesActivation InstructionskjansaNo ratings yet
- An 023Document8 pagesAn 023SoumitraNo ratings yet
- RSTrainer CD-ROM CoursesDocument2 pagesRSTrainer CD-ROM CoursesRoberth PuenteNo ratings yet
- Elnet TXT - User ManualDocument83 pagesElnet TXT - User ManualpablodanielrigoNo ratings yet
- Elnet LTC - User ManualDocument15 pagesElnet LTC - User ManualpablodanielrigoNo ratings yet
- Diagnostico SETRY 100Document6 pagesDiagnostico SETRY 100pablodanielrigoNo ratings yet
- Hummer ObdDocument4 pagesHummer ObdpablodanielrigoNo ratings yet
- Hummer ObdDocument4 pagesHummer ObdpablodanielrigoNo ratings yet
- CanDocument11 pagesCanpablodanielrigo100% (2)
- Power Derived From Serial PortDocument5 pagesPower Derived From Serial PortpablodanielrigoNo ratings yet
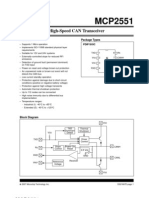
- MCP 2551Document24 pagesMCP 2551senguttuvelNo ratings yet
- Top221 227Document20 pagesTop221 227JEVG1No ratings yet
- Datasheet BD241Document6 pagesDatasheet BD241pablodanielrigoNo ratings yet
- Alti MetroDocument1 pageAlti MetropablodanielrigoNo ratings yet
- Sensores Inductivos Con Puente de Wheastone y de WyerDocument41 pagesSensores Inductivos Con Puente de Wheastone y de WyerpablodanielrigoNo ratings yet
- Read MeDocument3 pagesRead MeKristian Adi WinataNo ratings yet
- ENC28J60 Ethernet Interface ModuleDocument1 pageENC28J60 Ethernet Interface ModulepablodanielrigoNo ratings yet
- Error 500 Unknown Column 'A.note' in 'Field List' - Joomla! Forum - Community, Help and SupportDocument1 pageError 500 Unknown Column 'A.note' in 'Field List' - Joomla! Forum - Community, Help and Supportsmart.engineerNo ratings yet
- Thesis Statement About Plastic BagsDocument7 pagesThesis Statement About Plastic Bagslyjtpnxff100% (2)
- Imantanout LLGDDocument4 pagesImantanout LLGDNABILNo ratings yet
- Chapter-5-Entrepreneurial-Marketing Inoceno de Ocampo EvangelistaDocument63 pagesChapter-5-Entrepreneurial-Marketing Inoceno de Ocampo EvangelistaMelgrey InocenoNo ratings yet
- Efectele Crizei Economice Asupra Politicilor Pietei Muncii Din RomaniaDocument24 pagesEfectele Crizei Economice Asupra Politicilor Pietei Muncii Din Romaniacristian_incaltarauNo ratings yet
- Recognition & Derecognition 5Document27 pagesRecognition & Derecognition 5sajedulNo ratings yet
- TurboVap LV Users ManualDocument48 pagesTurboVap LV Users ManualAhmad HamdounNo ratings yet
- GPL 12800 (80) AhDocument1 pageGPL 12800 (80) AhismailNo ratings yet
- About Kia Motors Corporation: All-NewDocument19 pagesAbout Kia Motors Corporation: All-NewWessam FathiNo ratings yet
- JDC Merchanndising ActivityDocument6 pagesJDC Merchanndising ActivityShaira Sahibad100% (1)
- Understanding Nominal Pipe Sizes (NPS) and Pipe DimensionsDocument39 pagesUnderstanding Nominal Pipe Sizes (NPS) and Pipe DimensionsprathikNo ratings yet
- EzraCohen TVMasterclass 2.0Document10 pagesEzraCohen TVMasterclass 2.0Pete PetittiNo ratings yet
- B JA RON GAWATDocument17 pagesB JA RON GAWATRon GawatNo ratings yet
- Alvarez vs. COMELECDocument5 pagesAlvarez vs. COMELECvanessa3333333No ratings yet
- OTA710C User ManualDocument32 pagesOTA710C User ManualEver Daniel Barreto Rojas100% (2)
- Daa M-4Document28 pagesDaa M-4Vairavel ChenniyappanNo ratings yet
- Draft ASCE-AWEA RecommendedPracticeDocument72 pagesDraft ASCE-AWEA RecommendedPracticeTeeBoneNo ratings yet
- imageRUNNER_ADVANCE_715_615_525_III_Series_PC_r2_200122Document87 pagesimageRUNNER_ADVANCE_715_615_525_III_Series_PC_r2_200122techwisekgNo ratings yet
- Optimization TheoryDocument18 pagesOptimization TheoryDivine Ada PicarNo ratings yet
- Patient Safety IngDocument6 pagesPatient Safety IngUlfani DewiNo ratings yet
- Powder CharacterizationDocument21 pagesPowder CharacterizationecternalNo ratings yet