You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Piirustukset Pistooli Sig p228Document10 pagesPiirustukset Pistooli Sig p228Scott FlanaganNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Covert Hunter by Bill HaysDocument1 pageThe Covert Hunter by Bill HaysFrançois LeroyNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Brochure Larner Johnson PDFDocument20 pagesBrochure Larner Johnson PDFFrançois LeroyNo ratings yet
- MEISER Caillebotis PDFDocument124 pagesMEISER Caillebotis PDFlbo33No ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Systeme FNP 1067Document3 pagesSysteme FNP 1067François LeroyNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Brochure Larner Johnson PDFDocument20 pagesBrochure Larner Johnson PDFFrançois LeroyNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Brochure Larner Johnson PDFDocument20 pagesBrochure Larner Johnson PDFFrançois LeroyNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- JACO Single Shot WesternPistolDocument5 pagesJACO Single Shot WesternPistolFrançois LeroyNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Evaluation of Improvised Shaped ChargesDocument50 pagesEvaluation of Improvised Shaped ChargesFrançois LeroyNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Motor Gasoline Analysis and SpecificationsDocument4 pagesMotor Gasoline Analysis and SpecificationsFrançois LeroyNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
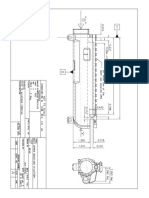
- How To Build A Catalytic Test Reactor: Raoul Naumann D'alnoncourtDocument55 pagesHow To Build A Catalytic Test Reactor: Raoul Naumann D'alnoncourtFrançois LeroyNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Augmented Spark Gap Igniter For Propellants: Descr Mouser Part NumberDocument3 pagesAugmented Spark Gap Igniter For Propellants: Descr Mouser Part NumberFrançois LeroyNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- ExplosivesDocument355 pagesExplosivesjwitzel100% (1)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Homemadeprimercourse PDFDocument17 pagesHomemadeprimercourse PDFFrançois LeroyNo ratings yet
- Post 3 45540 .22 Pocket Pistol DwgsDocument9 pagesPost 3 45540 .22 Pocket Pistol DwgsFrançois Leroy96% (23)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Air GunsDocument205 pagesAir Gunsjnessler100% (9)
- Ruger BoltDocument2 pagesRuger BoltFrançois LeroyNo ratings yet
- Textbook of Advanced Machine WorkDocument578 pagesTextbook of Advanced Machine WorkFrançois LeroyNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Ar15upper FlattopDocument8 pagesAr15upper FlattopFrançois LeroyNo ratings yet
- Ruger MK 1 Receiver BlueprintsDocument2 pagesRuger MK 1 Receiver BlueprintsFrançois LeroyNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Command Generation For Dynamic Systems1Document237 pagesCommand Generation For Dynamic Systems1Chouaib NemriNo ratings yet
- Rotor DynamicsDocument91 pagesRotor DynamicsVahid Rezaei100% (2)
- Gantry CraneDocument6 pagesGantry CraneAdrianmb0% (1)
- Physics Notes 50 Questions For SSC CGL Tier 2 ExamDocument24 pagesPhysics Notes 50 Questions For SSC CGL Tier 2 ExamZoe PlayNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Namma Kalvi 11th Physics Volume 2 Important Question Bank em 216214Document11 pagesNamma Kalvi 11th Physics Volume 2 Important Question Bank em 216214sudha rathinamNo ratings yet
- Non Min PhaseDocument5 pagesNon Min PhaseagrothendieckNo ratings yet
- APS Dynamics APS Long Stroke ShakerDocument30 pagesAPS Dynamics APS Long Stroke ShakerSherif EltoukhiNo ratings yet
- At6604 Vehicle Dynamics R 2013 Learing Material - PM SubramanianDocument51 pagesAt6604 Vehicle Dynamics R 2013 Learing Material - PM SubramanianSubramanian Pm100% (1)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Forced Harmonic Vibration: SDOF SystemDocument37 pagesForced Harmonic Vibration: SDOF SystemFernanda LagoNo ratings yet
- GEAS Reviewer QuestionDocument58 pagesGEAS Reviewer QuestionMai PerezNo ratings yet
- Specific Heat RatioDocument5 pagesSpecific Heat RatioTj RentoyNo ratings yet
- Vibrations Solutions - PartialDocument15 pagesVibrations Solutions - Partialayariseifallah100% (1)
- An Adaptive Power Oscillation Damping Controllerby STATCOM With Energy StorageDocument10 pagesAn Adaptive Power Oscillation Damping Controllerby STATCOM With Energy StorageChristian EmenikeNo ratings yet
- SDOFDocument107 pagesSDOFMohammed B TuseNo ratings yet
- Songle Not A BotDocument36 pagesSongle Not A BotAyuguNo ratings yet
- Course Specifications: Vibration and Waves - Physics Specifications (Phys 231)Document10 pagesCourse Specifications: Vibration and Waves - Physics Specifications (Phys 231)Ivanadel NainggolanNo ratings yet
- Chapter 15【Oscillations】Document20 pagesChapter 15【Oscillations】陳慶銘No ratings yet
- Test Paper Oscillation & WavesDocument3 pagesTest Paper Oscillation & Wavesumved singh yadav100% (1)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Quantum Harmonic OscillatorDocument19 pagesThe Quantum Harmonic OscillatorSean MortaraNo ratings yet
- Seismic Design of Structures With Viscous Dampers PDFDocument15 pagesSeismic Design of Structures With Viscous Dampers PDFErland Ramírez SalazarNo ratings yet
- HomeworksDocument16 pagesHomeworksgrampa788No ratings yet
- Chapter 1 - Inmann Mechanical VibrationDocument11 pagesChapter 1 - Inmann Mechanical Vibrationrizky f. utomoNo ratings yet
- The Theory of Oscillating Reactions-Joseph HigginsDocument45 pagesThe Theory of Oscillating Reactions-Joseph HigginsAnshid kuttasseriNo ratings yet
- Automobile Engineering Kerala SyllabusDocument199 pagesAutomobile Engineering Kerala SyllabusJinu MadhavanNo ratings yet
- AME 5003-Lecture-2 Modelling of Mechanical SystemsDocument35 pagesAME 5003-Lecture-2 Modelling of Mechanical SystemsIkram KhanNo ratings yet
- FLC-MR Damper Control of Stay Cable Nonlinear Vibration: Skfali@civil - Iisc.ernet - inDocument6 pagesFLC-MR Damper Control of Stay Cable Nonlinear Vibration: Skfali@civil - Iisc.ernet - inShaikh Faruque AliNo ratings yet
- BSC PhysicsDocument102 pagesBSC PhysicsDawn DavidNo ratings yet
- CnfM4C9cYhFFlntsPnf2 PDFDocument26 pagesCnfM4C9cYhFFlntsPnf2 PDFKhan farazNo ratings yet
- Soil Dynamics Assignment (Bit) : Set by Dr. Tensay Gebremedhin Page 1/2Document2 pagesSoil Dynamics Assignment (Bit) : Set by Dr. Tensay Gebremedhin Page 1/2Bogale SenayNo ratings yet
- Intro Physics 1Document590 pagesIntro Physics 1Shiro Neko The WisemanNo ratings yet