You might also like
- Poems PDFDocument17 pagesPoems PDFladydevon1100% (1)
- PIANC Underkeel Clearance Large Vessels Bulletin-51 1985Document26 pagesPIANC Underkeel Clearance Large Vessels Bulletin-51 1985William G. Borst100% (1)
- Holtrop Mennen An Approximate Power Prediction Method PDFDocument6 pagesHoltrop Mennen An Approximate Power Prediction Method PDFSahil JawaNo ratings yet
- Commercial Ship Surveying: On/Off Hire Condition Surveys and Bunker SurveysFrom EverandCommercial Ship Surveying: On/Off Hire Condition Surveys and Bunker SurveysRating: 4.5 out of 5 stars4.5/5 (6)
- A Guide to Ship Repair Estimates in Man-hoursFrom EverandA Guide to Ship Repair Estimates in Man-hoursRating: 4.5 out of 5 stars4.5/5 (5)
- Marine and Offshore Pumping and Piping SystemsFrom EverandMarine and Offshore Pumping and Piping SystemsRating: 4.5 out of 5 stars4.5/5 (2)
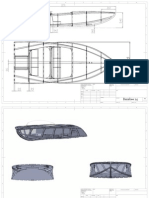
- Banshee 14 Boat SkiffDocument2 pagesBanshee 14 Boat Skiffjukka_rabdNo ratings yet
- Ship Resistance Calculation For A Fishing VesselDocument73 pagesShip Resistance Calculation For A Fishing VesselMahdi100% (5)
- The Design of A Slotted Vertical Screen Breakwater PDFDocument13 pagesThe Design of A Slotted Vertical Screen Breakwater PDFscrane@No ratings yet
- Brodsky, Joseph - So Forth (FSG, 1996)Document140 pagesBrodsky, Joseph - So Forth (FSG, 1996)Isaac Jarquín100% (1)
- LPG LNG Cargo HandlingDocument36 pagesLPG LNG Cargo Handlingaman agrawalNo ratings yet
- Mechanix Illustrated TeardropDocument7 pagesMechanix Illustrated TeardropRicky Frentress100% (3)
- Ship Dynamic Intact Stability Focus On Parametric Roll: Technical ReportDocument44 pagesShip Dynamic Intact Stability Focus On Parametric Roll: Technical Reporteacikel78No ratings yet
- OA2 2a VocabularyDocument10 pagesOA2 2a Vocabularymafalda1286No ratings yet
- Ch5.0 Operation of BoilersDocument80 pagesCh5.0 Operation of BoilersRey100% (1)
- OCIMF CFD Current Drag Report For MEG4 Working GroupDocument40 pagesOCIMF CFD Current Drag Report For MEG4 Working Groupnestor mospanNo ratings yet
- New Guidelines For Speed/Power TrialsDocument11 pagesNew Guidelines For Speed/Power TrialsodvasquezNo ratings yet
- WP 2 - Report 4 - Resistance and Propulsion Power - FINAL - October 2012Document52 pagesWP 2 - Report 4 - Resistance and Propulsion Power - FINAL - October 2012jimmyy90No ratings yet
- STA Article 30jan2013 PDFDocument11 pagesSTA Article 30jan2013 PDFpriyoNo ratings yet
- Biology Major LetDocument8 pagesBiology Major LetAiza Baleña100% (1)
- Petrobras P-55 SCR DesingDocument6 pagesPetrobras P-55 SCR DesingJuan LopezNo ratings yet
- Ikeda RevisitedDocument11 pagesIkeda RevisitedZawadul IslamNo ratings yet
- Identification of The Nonlinear Ship Model Parameters Based On The Turning Test Trial and The Backstepping ProcedureDocument20 pagesIdentification of The Nonlinear Ship Model Parameters Based On The Turning Test Trial and The Backstepping ProcedureMounir MouhNo ratings yet
- Methodical Series Tests For Fuller Ship Hull Forms: Ocean EngngDocument48 pagesMethodical Series Tests For Fuller Ship Hull Forms: Ocean EngngEdson SerejoNo ratings yet
- Journee SteeringDocument21 pagesJournee SteeringsorenvinNo ratings yet
- Computational and Experimental Works On Ship ResisDocument9 pagesComputational and Experimental Works On Ship ResisKyaw Win TunNo ratings yet
- Numerical Simulations of A Surface Piercing A-Class Catamaran Hydrofoil and Comparison Against Model TestsDocument10 pagesNumerical Simulations of A Surface Piercing A-Class Catamaran Hydrofoil and Comparison Against Model TestsBillyNo ratings yet
- Hiper04 Paper ADocument13 pagesHiper04 Paper AaspoisdNo ratings yet
- Criteria For Yaw-Checking and Course-KeepingDocument13 pagesCriteria For Yaw-Checking and Course-KeepingVijayaragavan SakthivelNo ratings yet
- 03 The Foiling OptimistDocument12 pages03 The Foiling OptimisttoncipNo ratings yet
- The Hydrodynamics Performance of Aquaculture Fishing Vessel in Variation of Deadrise Angle and SponsonDocument10 pagesThe Hydrodynamics Performance of Aquaculture Fishing Vessel in Variation of Deadrise Angle and SponsonTJPRC PublicationsNo ratings yet
- Stability Criteria For Sailing Vessels: January 2008Document15 pagesStability Criteria For Sailing Vessels: January 2008Daniel OOWNo ratings yet
- Paper Part IIDocument8 pagesPaper Part IIPrasanta Sahoo100% (1)
- Study On The Form Factor and Full-Scale Ship Resistance Prediction MethodDocument2 pagesStudy On The Form Factor and Full-Scale Ship Resistance Prediction MethodRaka AdityaNo ratings yet
- Wave Restance For High-Speed CatamaransDocument30 pagesWave Restance For High-Speed CatamaransKay OosterwegelNo ratings yet
- Validation of The NATO-Standard Ship Signature Model (SHIPIR)Document11 pagesValidation of The NATO-Standard Ship Signature Model (SHIPIR)mapache1111No ratings yet
- Experimental and CFD Study of Wave Resistance of High-Speed Round Bilge Catamaran Hull FormsDocument13 pagesExperimental and CFD Study of Wave Resistance of High-Speed Round Bilge Catamaran Hull FormsWai Yan Thet PaingNo ratings yet
- Global View On Ship Trim OptimizationDocument12 pagesGlobal View On Ship Trim OptimizationSea Man MktNo ratings yet
- Chapter Vi Resistance PredictionDocument18 pagesChapter Vi Resistance PredictionAbraham RakuljicNo ratings yet
- HSMV 2014 Vitiello MirandaDocument9 pagesHSMV 2014 Vitiello MirandaTihomir MarkovicNo ratings yet
- Jeme 2020Document8 pagesJeme 2020Carlene ToaNo ratings yet
- Tailieuchung 010 17 183 2303Document7 pagesTailieuchung 010 17 183 2303Mạnh Hoàng NguyễnNo ratings yet
- Weather Criterion Explained PDFDocument14 pagesWeather Criterion Explained PDFDeep SeaNo ratings yet
- Ocean Engineering: K. Niklas, H. PruszkoDocument13 pagesOcean Engineering: K. Niklas, H. PruszkoAnthony MarineNo ratings yet
- Fin Area EffectDocument8 pagesFin Area EffectyildirimelifNo ratings yet
- A Comparative Study On The Seakeeping Operability Performance of Naval CombatantsDocument12 pagesA Comparative Study On The Seakeeping Operability Performance of Naval CombatantsGiannis PanagiotopoulosNo ratings yet
- PreReading L13 ESD Khorasanchi Et AlDocument10 pagesPreReading L13 ESD Khorasanchi Et AlTalish Mahmood TalishNo ratings yet
- 2012 TPC 453wangDocument8 pages2012 TPC 453wangRhn RhnNo ratings yet
- Evaluation of Resistance Increase and Speed Loss of A Ship in Wind and WavesDocument7 pagesEvaluation of Resistance Increase and Speed Loss of A Ship in Wind and WavesCarlos HernándezNo ratings yet
- Resistance CommitteeDocument56 pagesResistance CommitteeTullio OpattiNo ratings yet
- The Influence of Roll Radius of Gyration Including The Efffect of Inertia of Fluids On Motion PredictionsDocument15 pagesThe Influence of Roll Radius of Gyration Including The Efffect of Inertia of Fluids On Motion PredictionsVinayak29No ratings yet
- Samuel 2021 IOP Conf. Ser. Mater. Sci. Eng. 1096 012041Document15 pagesSamuel 2021 IOP Conf. Ser. Mater. Sci. Eng. 1096 012041Kivanc PekerNo ratings yet
- FDA CAPBook Rev 9 April 2020Document28 pagesFDA CAPBook Rev 9 April 2020Alexandros KritsotakisNo ratings yet
- Estimation of Wave Making Resistance by Wave Analysis Ship Wave at SeaDocument11 pagesEstimation of Wave Making Resistance by Wave Analysis Ship Wave at SeaPosei DonNo ratings yet
- CFD Assessment of Ropax Hull Resistance With Various Initial Drafts and Trim AnglesDocument8 pagesCFD Assessment of Ropax Hull Resistance With Various Initial Drafts and Trim AnglesRahul SunilNo ratings yet
- Some Experimental Results On The Stability of Fishing VesselsDocument12 pagesSome Experimental Results On The Stability of Fishing VesselsEd UrquizaNo ratings yet
- On The Roll Radius of Gyration of Ro-Ro Passenger ShipsDocument1 pageOn The Roll Radius of Gyration of Ro-Ro Passenger ShipsMircea PavelNo ratings yet
- Jmse 11 00911 v2Document5 pagesJmse 11 00911 v2Rajagopalan GurumurthyNo ratings yet
- Executive Summary:: International Maritime OrganizationDocument6 pagesExecutive Summary:: International Maritime OrganizationdarrelsilvaNo ratings yet
- Comparison of Model Test With Ship Sea Trial PDFDocument8 pagesComparison of Model Test With Ship Sea Trial PDFSunil Kumar P GNo ratings yet
- Numerical Investigation On The Effect of Trim On Ship Resistance by RANSE MethodDocument11 pagesNumerical Investigation On The Effect of Trim On Ship Resistance by RANSE Methodheinz billNo ratings yet
- ShipHydroLN 4Document7 pagesShipHydroLN 4yetNo ratings yet
- Gao2019 1Document9 pagesGao2019 1Carlos Eduardo Simoes de AlmeidaNo ratings yet
- Progress in Aeronautical Sciences: Volume 3From EverandProgress in Aeronautical Sciences: Volume 3Antonio FerriRating: 5 out of 5 stars5/5 (1)
- Wave and Tidal EnergyFrom EverandWave and Tidal EnergyDeborah GreavesNo ratings yet
- Explocat 52 General Description V1.2Document23 pagesExplocat 52 General Description V1.2tdfsksNo ratings yet
- Culver Cadet HandbookDocument29 pagesCulver Cadet HandbooktdfsksNo ratings yet
- Part 23 Airworthiness Standards - Landing Gear - Amdt 48Document12 pagesPart 23 Airworthiness Standards - Landing Gear - Amdt 48tdfsksNo ratings yet
- DesignGuidelinesfortheSelectionandUseofStainlessSteels 9014 PDFDocument54 pagesDesignGuidelinesfortheSelectionandUseofStainlessSteels 9014 PDFFadly FaradhilaNo ratings yet
- SH FEACorrigenda Feb14Document2 pagesSH FEACorrigenda Feb14tdfsksNo ratings yet
- FAST99 PaperDocument12 pagesFAST99 PapertdfsksNo ratings yet
- 3 Ym 20Document2 pages3 Ym 20tdfsksNo ratings yet
- Safehull Finite Element Analysis of Hull Structures: Guidance Notes OnDocument50 pagesSafehull Finite Element Analysis of Hull Structures: Guidance Notes OntdfsksNo ratings yet
- A B Ratio SeatonDocument3 pagesA B Ratio SeatontdfsksNo ratings yet
- 3 Ym 20Document2 pages3 Ym 20tdfsksNo ratings yet
- Predictions of The Resistance and Squat of 12 "Lego" Series Model HullsDocument5 pagesPredictions of The Resistance and Squat of 12 "Lego" Series Model HullstdfsksNo ratings yet
- Rigger Reference Booklet 0811Document10 pagesRigger Reference Booklet 0811tdfsksNo ratings yet
- Ms 28035Document1 pageMs 28035tdfsksNo ratings yet
- Technical Standard Order: TSO-C54Document3 pagesTechnical Standard Order: TSO-C54tdfsks100% (1)
- Andromeda Superflex Steel Slings - SmallDocument4 pagesAndromeda Superflex Steel Slings - Smalltdfsks100% (1)
- Bahan Us 2017Document24 pagesBahan Us 2017Ir SuhaeniNo ratings yet
- How'S The Weather?: Conversation Cheat SheetDocument2 pagesHow'S The Weather?: Conversation Cheat SheetMiguel GuedesNo ratings yet
- Bristol Scroll Compressors GuidelinesDocument18 pagesBristol Scroll Compressors GuidelinesBrian DohertyNo ratings yet
- Ingles para TurismoDocument12 pagesIngles para TurismozurinefNo ratings yet
- Tasmanian Tiger BackpacksDocument12 pagesTasmanian Tiger Backpacksგაგი ნარტყოშვილიNo ratings yet
- Grammar AdverbsDocument14 pagesGrammar AdverbsMariano SaabNo ratings yet
- CSSBI-12M-13 - Standard For Composite Steel DeckDocument9 pagesCSSBI-12M-13 - Standard For Composite Steel DeckjulianobiancoNo ratings yet
- Clal First Home Insurance Policy - June 2016 Edition - TRANSLATIONDocument48 pagesClal First Home Insurance Policy - June 2016 Edition - TRANSLATIONtzchokNo ratings yet
- PArt1 1 3 PDFDocument7 pagesPArt1 1 3 PDFGurleen GrewalNo ratings yet
- Complejos de Cobalto ArtDocument3 pagesComplejos de Cobalto ArtNatalia MayaNo ratings yet
- PH1 PDFDocument1 pagePH1 PDFLuis AncallaNo ratings yet
- Business Research & Statitics Part IIDocument60 pagesBusiness Research & Statitics Part IIBekele MindaNo ratings yet
- Weathering The Storm: A State and Local Perspective On Emergency ManagementDocument77 pagesWeathering The Storm: A State and Local Perspective On Emergency ManagementScribd Government DocsNo ratings yet
- KD 2019 Kings Dominion MapDocument2 pagesKD 2019 Kings Dominion MapMahendra BandsodeNo ratings yet
- Every Number CountsDocument5 pagesEvery Number CountsGary GohNo ratings yet
- REVIEW - II PARTIAL-Luiggi Ronaldo Macias BailonDocument3 pagesREVIEW - II PARTIAL-Luiggi Ronaldo Macias BailonAyrton Orlando MaciasNo ratings yet
- Chemical Reactions Lab ReportDocument4 pagesChemical Reactions Lab ReportCole Haggar100% (3)
- MindanaoDocument8 pagesMindanaoreynaldo antonioNo ratings yet
- DsdsDocument52 pagesDsdsJasmin MedjedovicNo ratings yet
- G11pablo FirstDocument11 pagesG11pablo Firstapi-341659664No ratings yet
- Topseal Product Guide 2017Document20 pagesTopseal Product Guide 2017Alexandru StoianNo ratings yet
- Dps-4 P Dps-4 P Dps-4 P Dps-4 P DPS-4 Po Oo Oow W W W Wer Suppl Er Suppl Er Suppl Er Suppl Er SupplyyyyyDocument12 pagesDps-4 P Dps-4 P Dps-4 P Dps-4 P DPS-4 Po Oo Oow W W W Wer Suppl Er Suppl Er Suppl Er Suppl Er SupplyyyyyMalay K GhoshNo ratings yet
- Types of Sealants Used For Joints in Buildings - Properties, Uses, WorkingDocument6 pagesTypes of Sealants Used For Joints in Buildings - Properties, Uses, WorkingJustin MusopoleNo ratings yet
- Lva1 App6892 PDFDocument20 pagesLva1 App6892 PDFhazel marie pejano jacaNo ratings yet