You might also like
- DC DrivesDocument50 pagesDC DrivesjvilasisNo ratings yet
- Lecture 8 - Specification and Limitations: K. J. ÅströmDocument12 pagesLecture 8 - Specification and Limitations: K. J. ÅströmEdutamNo ratings yet
- Dynamic Analysis of Switching ConvertersDocument134 pagesDynamic Analysis of Switching ConvertersLisonildoNo ratings yet
- Pid Controller: Ashok.S 500017496 M.Tech Pde R670211016Document40 pagesPid Controller: Ashok.S 500017496 M.Tech Pde R670211016Ashik Jacob Oommen100% (1)
- Unit-3 PDCDocument59 pagesUnit-3 PDCNirmal Kumar PandeyNo ratings yet
- Adaptive PID With Sliding Mode Control For The Rotary InvertedDocument6 pagesAdaptive PID With Sliding Mode Control For The Rotary InvertedImee RistikaNo ratings yet
- Processcontrol Topic13 PidtuningDocument15 pagesProcesscontrol Topic13 Pidtuningmuthukumartharani100% (1)
- Introduction To Switched-Mode Converter Modeling Using MATLAB/SimulinkDocument37 pagesIntroduction To Switched-Mode Converter Modeling Using MATLAB/SimulinkAhana MalhotraNo ratings yet
- Csu Dan SimonDocument36 pagesCsu Dan SimonUttam MNNo ratings yet
- PID Control Fundamentals ExplainedDocument56 pagesPID Control Fundamentals ExplainedSyafRizal100% (1)
- Lecture4 PIDDocument21 pagesLecture4 PIDSandro MoreroNo ratings yet
- Automatic Voltage RegulatorsDocument35 pagesAutomatic Voltage RegulatorsAlejandroHerreraGurideChileNo ratings yet
- Lecture I - Introduction To PID Control SystemDocument47 pagesLecture I - Introduction To PID Control SystemR.W. SaputraNo ratings yet
- Closed-Loop DynamicsDocument20 pagesClosed-Loop Dynamicsjunhao_tan_1100% (1)
- Jay H Lee - MPC Lecture NotesDocument137 pagesJay H Lee - MPC Lecture NotesVnomiksNo ratings yet
- Chap 08 Marlin 2002Document37 pagesChap 08 Marlin 2002Audrey Patrick KallaNo ratings yet
- Compensator Design II PDFDocument37 pagesCompensator Design II PDFMani Vannan SoundarapandiyanNo ratings yet
- Repetitive ControlDocument22 pagesRepetitive ControlShri KulkarniNo ratings yet
- Process ControlDocument26 pagesProcess ControlMeenaNo ratings yet
- Process ControlDocument55 pagesProcess ControlUmair IqbalNo ratings yet
- Input Output ControllabilityDocument20 pagesInput Output ControllabilityZulfansyah MuchtarNo ratings yet
- Project Based Learning IcsDocument14 pagesProject Based Learning IcsAvinash YadavNo ratings yet
- Researches Regarding Functional Stabilization of Electro-Hydraulic Servo-SystemsDocument4 pagesResearches Regarding Functional Stabilization of Electro-Hydraulic Servo-SystemsMaria Gabriela BusteloNo ratings yet
- Sallen-Key Low Pass Filter Design Routine: R C R G VDocument17 pagesSallen-Key Low Pass Filter Design Routine: R C R G VMohamed MostafaNo ratings yet
- Automatic Voltage RegulatorDocument35 pagesAutomatic Voltage Regulatoryousufswh100% (1)
- Colorado School of Mines CHEN403: 1 Where MinDocument12 pagesColorado School of Mines CHEN403: 1 Where MinpoopoophoNo ratings yet
- L2 - Modelling SystemsDocument21 pagesL2 - Modelling SystemsOmer AhmedNo ratings yet
- UAEU Electrical Engineering AGC Project ReportDocument87 pagesUAEU Electrical Engineering AGC Project ReportpadmajasivaNo ratings yet
- Study of P, PD, Pi, Pid Controllers Using Mat LabDocument13 pagesStudy of P, PD, Pi, Pid Controllers Using Mat LabVignesh NagarajanNo ratings yet
- Frequency ResponseDocument30 pagesFrequency ResponseGovind KumarNo ratings yet
- Pid TuningDocument19 pagesPid TuningAsuh Rifqi Prihandana100% (1)
- Discrete Time Synergetic Control For DC-DC Converter: N M N×N N×MDocument6 pagesDiscrete Time Synergetic Control For DC-DC Converter: N M N×N N×MAnonymous KhhapQJVYtNo ratings yet
- Lec 11 Sequential Logic CircuitsDocument49 pagesLec 11 Sequential Logic CircuitsDeependra NigamNo ratings yet
- Optimum State Space Control of A BLDC MotorDocument18 pagesOptimum State Space Control of A BLDC Motorauralius0% (1)
- Using MATLAB in Feedback Systems DesignDocument18 pagesUsing MATLAB in Feedback Systems DesignLê Tuấn Minh100% (1)
- Closed Loop Speed Control of a DC Motor Lab ManualDocument9 pagesClosed Loop Speed Control of a DC Motor Lab ManualnatashaNo ratings yet
- Assignment 2 - Adv CTL 2020Document7 pagesAssignment 2 - Adv CTL 2020Thành Trung Nguyễn QuáchNo ratings yet
- System Optimization of Motor ResolverDocument27 pagesSystem Optimization of Motor ResolverBlaize PascalNo ratings yet
- Starting: Chapter 7: PID ControlDocument13 pagesStarting: Chapter 7: PID ControlKishodarran Rajendran KicchoNo ratings yet
- Pres PEMDDocument30 pagesPres PEMDcesarlealferreiraNo ratings yet
- MPC ConceptsDocument26 pagesMPC Conceptsabdul_moiz_26No ratings yet
- Session 6Document13 pagesSession 6mohammedNo ratings yet
- Frequency Response DesignDocument22 pagesFrequency Response Designمعروف المحجريNo ratings yet
- Submitted by Vikrant Rana CH-6276Document30 pagesSubmitted by Vikrant Rana CH-6276vcoolkrazyNo ratings yet
- Math 5Document37 pagesMath 5Anonymous UrzdtCB0INo ratings yet
- DC Servo MotorDocument14 pagesDC Servo MotorGomaaNo ratings yet
- An Introduction to Proportional-Integral-Derivative (PID) ControllersDocument47 pagesAn Introduction to Proportional-Integral-Derivative (PID) ControllersAmar BeheraNo ratings yet
- Pspice Tutorial AcDocument89 pagesPspice Tutorial AcZadziorNo ratings yet
- Modeling Separately Excited DC Generator & Armature Controlled DC Shunt Motor Transfer FunctionsDocument67 pagesModeling Separately Excited DC Generator & Armature Controlled DC Shunt Motor Transfer FunctionsaniruthNo ratings yet
- Mart Data2001bDocument30 pagesMart Data2001bdffdfNo ratings yet
- Peng ProsDocument112 pagesPeng ProsWahyuSatyoTriadiNo ratings yet
- Controller Design Based On Transient Response CriteriaDocument20 pagesController Design Based On Transient Response CriteriaGapuk MaboekNo ratings yet
- Threshold SlidesDocument6 pagesThreshold SlidesoptoergoNo ratings yet
- Lect. 17 Che 185 - Pid ControlDocument36 pagesLect. 17 Che 185 - Pid ControlAhmad Adel El TantawyNo ratings yet
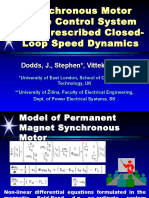
- Synchronous Motor Drive Control System With Prescribed Closed-Loop Speed DynamicsDocument20 pagesSynchronous Motor Drive Control System With Prescribed Closed-Loop Speed DynamicsVijay RajuNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Power Systems-On-Chip: Practical Aspects of DesignFrom EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardNo ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- PNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGFrom EverandPNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGNo ratings yet
- MLX92232 Datasheet MelexisDocument15 pagesMLX92232 Datasheet Melexisc_u_r_s_e_dNo ratings yet
- Comparison Between Half Wave and Full Wave Voltage DoublerDocument10 pagesComparison Between Half Wave and Full Wave Voltage Doublerc_u_r_s_e_dNo ratings yet
- Different Types of DiodesDocument31 pagesDifferent Types of Diodesc_u_r_s_e_dNo ratings yet
- Properties of Soft Magnetic MaterialsDocument57 pagesProperties of Soft Magnetic Materialsc_u_r_s_e_dNo ratings yet
- Wire Gauge VsDocument2 pagesWire Gauge Vsc_u_r_s_e_dNo ratings yet
- Current Source and Switched Capacitors in ParallelDocument7 pagesCurrent Source and Switched Capacitors in Parallelc_u_r_s_e_dNo ratings yet
- Bldh750 220vDocument8 pagesBldh750 220vc_u_r_s_e_dNo ratings yet
- Hysteresis and Magnetic Barkhausen Noise For SAE 1020Document4 pagesHysteresis and Magnetic Barkhausen Noise For SAE 1020c_u_r_s_e_dNo ratings yet
- Akü KapasiteDocument2 pagesAkü Kapasitec_u_r_s_e_dNo ratings yet
- ANSYS Maxwell - BrochureDocument2 pagesANSYS Maxwell - Brochurec_u_r_s_e_dNo ratings yet
- Introduction to AC MachinesDocument40 pagesIntroduction to AC Machinespepa6781% (31)
- 1 PBDocument12 pages1 PBc_u_r_s_e_dNo ratings yet
- CH 14 CarbonandAlloySteelsDocument42 pagesCH 14 CarbonandAlloySteelsdarwin_hua100% (1)
- 04771104Document6 pages04771104c_u_r_s_e_dNo ratings yet
- Innovation Concept For Measurement Gross Error Detection and Identification in Power System State EstimationDocument6 pagesInnovation Concept For Measurement Gross Error Detection and Identification in Power System State Estimationc_u_r_s_e_dNo ratings yet
- Fluke - Troubleshooting Auto Electrical SystemsDocument23 pagesFluke - Troubleshooting Auto Electrical SystemsWesley YoungNo ratings yet
- An 1187Document11 pagesAn 1187c_u_r_s_e_dNo ratings yet
- PID - Control & Ziegler-NicholsDocument36 pagesPID - Control & Ziegler-NicholsHachemi BheNo ratings yet
- 4934 Viswanathan Chapter 3Document14 pages4934 Viswanathan Chapter 3deltaman_3No ratings yet
- AN0356Document18 pagesAN0356c_u_r_s_e_dNo ratings yet
- Bad Data Analysis Using The Composed Measurements Errors For Power System State EstimationDocument7 pagesBad Data Analysis Using The Composed Measurements Errors For Power System State Estimationc_u_r_s_e_dNo ratings yet
- Efficient Power System State EstimationDocument5 pagesEfficient Power System State Estimationc_u_r_s_e_dNo ratings yet
- fp455 PDFDocument7 pagesfp455 PDFc_u_r_s_e_dNo ratings yet
- Applikat 105 Power Rev 2.0 eDocument22 pagesApplikat 105 Power Rev 2.0 ec_u_r_s_e_dNo ratings yet
- Theory of ErrorsDocument17 pagesTheory of ErrorsPrem PanigrahiNo ratings yet
- Hall Effect Sensors TheoryDocument12 pagesHall Effect Sensors TheoryPrateek BhatnagarNo ratings yet
- Brushless Sensor ConfigDocument11 pagesBrushless Sensor ConfigAlexandru TimofteNo ratings yet
- Bobinaj İletken TablosuDocument2 pagesBobinaj İletken Tablosuc_u_r_s_e_dNo ratings yet
- 09-04-2023 - Plumbing BOQ Without RatesDocument20 pages09-04-2023 - Plumbing BOQ Without RatesK. S. Design GroupNo ratings yet
- Link L5 Assessment AKDocument11 pagesLink L5 Assessment AKJoanna MajczykNo ratings yet
- Metamath: A Computer Language For Mathematical ProofsDocument247 pagesMetamath: A Computer Language For Mathematical ProofsJohn DoeNo ratings yet
- AmpConectorsExtracto PDFDocument5 pagesAmpConectorsExtracto PDFAdrian AvilesNo ratings yet
- Pedro Flores El Chapo TrialDocument19 pagesPedro Flores El Chapo TrialChivis MartinezNo ratings yet
- Cpar Lesson 1Document44 pagesCpar Lesson 1althea villanuevaNo ratings yet
- How Ventilators Deliver BreathsDocument51 pagesHow Ventilators Deliver BreathsArnaldo SantizoNo ratings yet
- Chapter #11: Volume #1Document35 pagesChapter #11: Volume #1Mohamed MohamedNo ratings yet
- DHRM 3 SyllabusDocument10 pagesDHRM 3 SyllabusCherokee Tuazon RodriguezNo ratings yet
- Complex Vector Model of The Squirrel Cage Induction Machine Including Instantaneous Rotor Bar CurrentsDocument8 pagesComplex Vector Model of The Squirrel Cage Induction Machine Including Instantaneous Rotor Bar CurrentsJorge Luis SotoNo ratings yet
- Design Inducer PumpDocument2 pagesDesign Inducer PumpnicoNo ratings yet
- SAM Project 1bDocument13 pagesSAM Project 1bNolan Blair0% (2)
- EM2P70CLP (LBP) - DatasheetDocument4 pagesEM2P70CLP (LBP) - DatasheetMarquesNo ratings yet
- INDIAMART 25012022003631 Investor Presentation Q3FY2021-22Document84 pagesINDIAMART 25012022003631 Investor Presentation Q3FY2021-22geethvazNo ratings yet
- BV14 Butterfly ValveDocument6 pagesBV14 Butterfly ValveFAIYAZ AHMEDNo ratings yet
- Bangladesh Red Crescent Society First Aid Kit SpecificationDocument1 pageBangladesh Red Crescent Society First Aid Kit SpecificationWORLDWIDE TRANSLATIONNo ratings yet
- VR 2200 CatalogueDocument4 pagesVR 2200 Catalogueh.torabyNo ratings yet
- Nodal Officer Wise Student ListDocument48 pagesNodal Officer Wise Student ListguerellaNo ratings yet
- Business Research Chapter 1Document27 pagesBusiness Research Chapter 1Toto H. Ali100% (2)
- HavellsDocument4 pagesHavellsanurag_iiitmNo ratings yet
- Anselm's Ontological Argument ExplainedDocument8 pagesAnselm's Ontological Argument ExplainedCharles NunezNo ratings yet
- Installation and Operating Instructions Gen-Key: Energy DivisionDocument22 pagesInstallation and Operating Instructions Gen-Key: Energy DivisionAnonymous RcxX0FcNo ratings yet
- ASTM 3950 Testing Methods For Strapping Versie 2007 211007 PDFDocument7 pagesASTM 3950 Testing Methods For Strapping Versie 2007 211007 PDFNestor CzerwackiNo ratings yet
- Red Lion MP Sensor Product Manual PDFDocument2 pagesRed Lion MP Sensor Product Manual PDFJigneshNo ratings yet
- Tectonics, Vol. 8, NO. 5, PAGES 1015-1036, October 1989Document22 pagesTectonics, Vol. 8, NO. 5, PAGES 1015-1036, October 1989atoinsepeNo ratings yet
- Pagewriter TC Cardiograph Service Manual Addendum Battery MaintenanceDocument9 pagesPagewriter TC Cardiograph Service Manual Addendum Battery MaintenanceCarlos ArturoNo ratings yet
- Past Paper 1 Ibsl: Phone: 7514251,0816930718Document4 pagesPast Paper 1 Ibsl: Phone: 7514251,0816930718santhiNo ratings yet
- Grade 9 SyllabusDocument23 pagesGrade 9 SyllabusClopzNo ratings yet
- Heat Exchangers: Thermal Activity and Fluid MotionDocument14 pagesHeat Exchangers: Thermal Activity and Fluid Motionishu vohraNo ratings yet
- MR - Abhishek JiDocument4 pagesMR - Abhishek Jimalikgaurav01No ratings yet