Professional Documents
Culture Documents
CAPÍTULO 12 Traduzido
Uploaded by
Mariana Pellegrini0 ratings0% found this document useful (0 votes)
43 views10 pagesCopyright
© © All Rights Reserved
Available Formats
DOCX, PDF, TXT or read online from Scribd
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
© All Rights Reserved
Available Formats
Download as DOCX, PDF, TXT or read online from Scribd
0 ratings0% found this document useful (0 votes)
43 views10 pagesCAPÍTULO 12 Traduzido
Uploaded by
Mariana PellegriniCopyright:
© All Rights Reserved
Available Formats
Download as DOCX, PDF, TXT or read online from Scribd
You are on page 1of 10
Traduzido por Pedro Corra.
Revisado por Suelen Virote
CAPTULO 12
O Rob De Batalha
Voc j deve ter ouvido (ou assistido) a varias Batalhas de Robs pela televiso, nos quais dois ou mais robs
entram em um ring (na verdade, uma gaiola a prova de bala) e s saem de l quando o nico rob se movendo como
um Ultimate Fighting para Robs. Neste captulo trataremos da constrio de um desses robs lutadores, ou para entrar
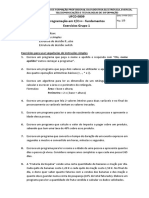
em uma competio ou para agir como Guarda-costas. Ao se construir um Rob de batalha (figura 12-1), a ideia e
desarmar e destruir seus oponentes, ento deixe seu sangue ferver e tenha algumas ideias ms!
Nesse captulo, voc construir um rob com quatro rodas e um invlucro de ao pesado, placas de ao em cada lado, e
dois tipos de armas anexadas. O mtodo de controle primrio um controle 2.4 GHz R/C, no qual permite controlar o
Arduino para ambos os motores e armas. Ao invs de usar um motor com engrenagens DC para mover esse rob (como
em outros projetos maiores desse livro), usaremos um motor sem engrenagem DC de Scooter e reduziremos a
velocidade usando uma corrente e um pinho, e mesmo com reduo de engrenagem, esse rob anda bem! Eu adicionei
dois tipos de armas no meu rob de batalha: Duas pontas de lanas duplas de ao presas na frente e na traseira e um
martelo motorizado preso a um brao mecnico de 90 cm; ambos para acabar com os oponentes.
Ateno: Esse Projeto no indicado para crianas. Esse tipo de rob s deve ser usado
em uma arena protegida e s deve ser testado quando desarmado.
Esse rob tem apenas o que necessrio para batalha e foca em velocidade e agilidade. As quatro rodas so
compostas de quatro motores DC independentes usando uma corrente separada para casa roda. Desta forma, se uma
das rodas se danifica, o rob ainda pode se mover. Diferentemente do captulo anterior, onde as baterias SLA eram
utilizadas pela reduo de custo, eu decidi usar uma bateria de Ltio-Polmero nesse rob para reduzir seu peso.
Figura 12-1. O rob de batalha quase completo, com lanas e o martelo com brao mecnico.
O rob de batalha desse captulo tem algumas caractersticas nicas que no foram includas em outros robs,
as quais podem ajudar a ganhar a batalha:
4x4 Cada roda tem seu prprio motor, sua prpria corrente e seu prprio controle.
Construo toda em ao No h acrlico e nem materiais de fcil quebra
Baterias de ltio-Polmero Usada para reduzir o peso e maximizar a autonomia.
Diversas Armas Ao usar dois tipos de armas (ativa e passiva), o rob pode sempre se defender.
Desenho simtrico Pode atacar em ambos os lados com o martelo bidirecional e as lanas nos dois lados.
Os robs desse livro at agora foram uma prova de conceito, iniciando a construo de robs para realizar as mais
prticas funes humanas sem nos levar a falncia. O foco primrio nos captulos iniciais era construir um rob usando
simples experincias passadas. Agora, o que fazer quando voc percebe que voc j pode construir um rob que segue
seus comandos ou que pode ser programado? Voc comea a colocar armas nele e ento o coloca no campo de
batalha. O que mais voc pensa em fazer?
O COMBATE DE ROB COMEA
E
s
s
e
l
i
v
r
o
f
o
i
c
o
m
p
r
a
d
o
r
p
o
r
i
l
e
a
o
@
p
u
v
r
.
u
f
f
.
b
r
Traduzido por Pedro Corra. Revisado por Suelen Virote
Pelo fato de eu ser uma pessoa de paz, no querendo lutar contra ningum ou machucar algum, o combate de
robs muito divertido de assistir. Voc sabe que algum est ferido pelo simples motivo de um grande trabalho ao
reparar seu querido rob, mas nenhum ser humano sai de l machucado. Segurana a preocupao nmero um em
qualquer batalha de robs. Outras preocupaes so a segurana das armas, o desligamento de emergncia e sensores
que impedem que o rob machuque algum ser humano.
Mas quando o rob est competindo, ele est normalmente sujeito a perigos da prpria arena que so colocados
para distrair e danificar os robs durante a batalha. Se o seu oponente maior e mais assustador que o seu rob, voc
ainda tem como contar com as lanas nas laterais das arenas, serras saindo do cho, um martelo pronto para esmagar o
que estiver na frente e um brao pneumtico saindo do cho se voc passar por cima Esses so apenas alguns dos
perigos da arena.
Eu no tenho certeza de quando a primeira batalha de robs aconteceu, mas segundo o site
http://www.robotcombat.com/history.html (site do conhecido do Team Nightmare e do Robot Marketplace), os combates
robticos comearam no mnimo em 1994, quando um homem chamado Marc Thrope decidiu organizar um evento
especfico para batalha de robs, chamando-o de Guerra de Robs. Eu no irei citar os nomes que vieram depois, mas
seguro dizer que enquanto as pessoas continuarem a construir robs, mais elas iro querer coloca-los em um combate.
Um rob de batalha no pode ser simples; ele deve ser construdo para aguentar as mais extremas condies
que a gente pode imaginar. Em uma batalha, no se tem tempo de consertar um cabo solto, ou pedir para que o outro
cara evite lhe bater no lado esquerdo porque ali onde o motor est montado. Voc deve planejar j pensando no pior e
torcer para que o seu rob seja melhor que o do adversrio. Qualquer fraqueza escondida que seu rob tenha se tornar
obvia quando ele for danificado pelo oponente.
REGRAS DA BATALHA DE ROBS E REGULAMENTOS
Assim como em qualquer esporte tem que existir uma quantidade de regras e guias para cada participante
seguir, para deixar o jogo mais interessante mantendo tudo justo. Certos mtodos de ataque e alguns tipos de armas no
so permitidos para serem usados porque requerem um pouco mais de conhecimento e parece um pouco injusto com os
outros times. Por segurana, suas armas no podem soltar gua, leo ou outros fluidos ou qumicos nos seus oponentes
ou no cho da arena; Mesmo que isso possa desativar o rob deles, no exatamente a excitao que os robs de
batalha esperam.
A regra mais importante para muitos dos construtores de robs so as restries de peso que separa os
participantes em classes. Existem diversas classes de pesos no combate de robs; a Wikipdia descreve essas classes
com nomes. Essas classes abrangem de 454g 58Kg e no so para qualquer tipo de competio, mas normalmente
para uma coleo de diferentes classes de peso para diversos eventos (veja a tabela 12-1).
Tabela 12-1. Lista de classes de pesos de batalhas de rob da Wikipdia
PESO CLASSE
75 g Fleaweight
150g Faiyweight
1 pound (454 g) Antweight
1 Kg (2,2 lbs.) Kilobot (Canada)
3 pounds (1,36 Kg) Beetleweight
6 pounds (2,72 Kg) Mantisweight
12 pounds (5,44 Kg) Hobbyweight
15 pounds (6,80 Kg) BotsIQ mini class
30 pound (13,6 kg) Featherweight
60 pound (27 kg) Lightweight
120 pound (54 kg) Middleweight/BotsIQ Large class
220 pound (100 kg) Heavyweight
340 pound (154 kg) Super Heavyweight
* Para mais informaes sobre batalha de robs, visite: http://en.wikipedia.org/wiki/Robot_Combat. (em ingls)
SEM LIMITE DE PREO
Traduzido por Pedro Corra. Revisado por Suelen Virote
Embora existam restries de peso e de segurana, no h regras sobre quanto dinheiro voc pode gastar em
sua batalha. Isso significa que voc pode esperar que alguns robs bem caros entrem no ringue. Os robs pesos-
pesados (heavy-weight) que competem na televiso facilmente iro custar milhares de dlares para construir. Esquadrias
de alumnio usinadas, armas e armaduras de titnio, peas desenhadas no CAD e engenharia de alto grau de
complexidade o que veio desse fenmeno, junto a uma onda de inspirao do faa voc mesmo, cada inventor tem
sua prpria verso do tecnocombatente definitivo .
Embora este "esporte" novo no seja produtivo na sua natureza, extremamente competitivo, o que chamou a
ateno de muitos que, normalmente, no tm interesse na construo de um rob. Eu posso honestamente dizer que
nenhum esporte (na TV) j manteve minha ateno, mas quando a batalha de robs comea, muito difcil de desviar o
olho at o jogo terminar.
Preo pode no ser um problema para alguns construtores, mas para mim (e provavelmente para voc, se
voc est lendo este livro), por isso uma boa se planejar para fazer uma rob que esteja dentro de sua faixa de preo.
Voc vai ter que substituir algumas peas, ento se certifique de no usar peas que sejam impossveis de serem
substitudas.
VAI SAIR CARO?
O custo total do rob depende da fornecedora e de quanto tempo voc tem para receber as peas. Tem como
voc ser mais econmico, usar algumas peas recicladas e ser paciente? Se sim, voc pode encontrar uma Scooter em
boas condies com uma bateria sem funcionar no lixo (assim como eu), e usar peas no seu sistema de armas. Se
voc no quer comprar a varejo, o eBay normalmente tem alguns itens excelentes para produtos descontinuados como
rodas, pinhes, motores e outros itens bem difceis de achar. Eu encontrei peas de montagem de rodas usadas nesse
projeto no eBay por US$ 12,99 cada, enquanto os mesmos itens em lojas online especializadas em Scooters no saiam
por menos de US$ 40,00. Minha ideia : se voc no tem muito dinheiro, voc pode encontrar peas baratas, s precisa
ser paciente.
Eu tentei fazer com que os projetos desse livro ficassem os mais acessveis o possvel pelos valores limitados
de projeto de US$ 500,00. Eu originalmente tentei usar controladores de motores menores (Sabertooth 2x12), mas o
peso extra da arma fez com que o rob precisasse de controladores mais eficientes. Eu decidir usar um controlador de
motor maior (Sabertooth 2x25) para esse projeto, elevando os custos para, aproximadamente US$ 650,00 como testado.
Mesmo que isso parea ser uma quantia elevada de dinheiro, uma quantidade pequena se voc quiser
competir na batalha de robs. Esse rob estar classificado como Lightweight ou Middleweight, dependendo das armas,
armaduras e baterias usadas. Tambm, voc pode construir apenas a base dos robs e instalar qualquer tipo de arma
que quiser, veja o que voc pode fazer com as prprias mos.
LISTA DE PARTES DO ROB
Essa lista de partes para esse projeto mais um guia do que uma lista exata de materiais. O nmero de partes
de cada parte que eu usei est listado, mas existem diferentes opes que podem substituir as partes que eu usei. Se
voc construiu o rob jardineiro do captulo 10, voc provavelmente tem algumas correntes e elos de correntes universais
e alguns parafusos e sucata que pode vir a calhar.
Eu sempre analiso meus fornecedores de peas em robs anteriores e pesquiso lojas barateiras antes de
comprar qualquer pea para o rob. Voc deve se surpreender com quantas coisas podem ser recicladas e reutilizadas.
D uma olhada na lista de peas para o rob de batalha na tabela 12-2.
Tabela 12-2. Lista de peas do rob de batalha
PARTE DESCRO PREO
ELETRNICOS
2.4 GHz R/C
Par transmissor e receptor
HobbyPartz.com (part# 79P-CT6B-R6B-
RadioSystem): Eu usei esse par de radio
causal de 2.4Ghz, 6 em diversos robs.
$32.00
2 controladores de motores duplos
Dimenso dos controladores 2x25: Esses so
usados para os motores de movimentao.
$125.00 cada (x2)
1 OSMC controlador de motor
Usado na arma: qualquer H-bridge mais forte
funciona, assumindo a taxa de voltagem de 24
vdc ou mais. Faa com um menor, clone do
OSMC que custa cerca de $40.
$40.00
MOVIMENTAO
4 DC motores Allelectronics.com pea numero XYD-15B
24VDC, 135W, 10Amp: Currie Technologies
$15.00 cada
Traduzido por Pedro Corra. Revisado por Suelen Virote
Motores de Scooters eltricas
Corrente N. 25 3m Allelectronics.com pea nmero CHN-25: 3
metros (10 ft) deve lhe dar uma margem se
algum pedao quebrar. Geralmente vendido
por $2.50/ft.
$25.00
4 elos gerais de correntes Allelectronics.com pea nmero ML-25: Voc
precisa de pelo menos 4, talvez 8 ou 10 para
melhor resultado.
$1.00 cada
4 kits Roda/pneu/pinho PartsforScooters.com pea numero 119-49:
Esse kit feito para a Scooter eltrica Razor.
Eu comprei na loja do eBay do
PartsforScooters (mesma roda, s que mais
barato) ao invs do site.
$15.00 cada
4 dentes de rodas
PartsforScooters.com pea numero 127-6:
Esses dentes de rodas tm 8mm de furo e 11
dentes para a corrente N. 25. Pode ser
necessrio usar colares de eixo para fixar.
$6.00 cada
FORA
2 baterias LiPoly de 3 clulas 11.1v,
3000mAH
HobbyPartz.com pea numero 83P-3000mAh-
3S1P-111-20C: voc precisa de pelo menos 2
dessas baterias para conseguir 22.2vdc, mas
voc pode usar modelos em paralelos para
obter 11.1v e 6000AH.
$16.00 cada
ESTRUTURA
Ao de amplo ngulo (2 ou 5cm) 2
metros (6 ft)
Lojas de peas: compe o permetro do
quadrado, num total de sees de 18
polegadas.
$17.00
Ao de amplo ngulo (3/4) - 1m (36)
Loja de Peas: cortei em duas partes iguais e
usei como cintas transversais para o centro do
quadro, tambm usado para montar o sistema
eletrnico (Battle-box).
$6.00
2 hastes rosqueadas de 5/16-inch
(8mm) de dimetro 1 m (36)
Setor de peas: Para os eixos dianteiro e
traseiro
$4.00 cada
2 tubos quadrados de ao 3/4-inch
1m (36)
Loja de peas: Usado para ativar a estrutura
das armas
$8.00 cada
2 folhas de metal 1x1 m (36x36).
Loja de peas: Usadas em cima e em baixo
para proteger o rob
$12.00 cada
ARMAS
Motor de Scooter eltrica com 24v,
350w, 22 Amp
Allelectronics.com pea nmero DCM-1352. $20.00
2 tubos quadrados de ao 3/4-inch
Use 2 de 1m (36) para fazer os braos $4.00 cada
2 hastes rolias de ao solido 5/8-inch
Usados como lana na frente e atrs. $7.00 cada
Sucata para o Martelo Qualquer coisa que encontrar que sirva para
fazer o martelo, como ao retorcido.
$0.00
Roda dentada montada ao motor Eu usei a estrutura da Scooter que eu encontrei
perto do meu trabalho. Mas eu adicionei o
numero do produto, caso voc no tenha tanta
sorte.
$0.00
Agora considerando disposies usando controles R/C na competio de robs e selecione um sistema de
controle que possa ser usado em conformidade.
COMANDOS DE ENTRADA
Se voc usar um sistema casual R/C no seu rob de batalha aps o dia 1 de julho de 2009, ele deve operar na
frequncia de 2,4 GHz porque as frequncias 27 MHz, 49 MHz, 75 Mhz e assim por diante, no esto mais disponveis
para uso. Em uma discusso anterior, os transmissores de radio Spread-Spetrum de 2.4 GHz devem se ligar aos
receptores, tornando-os quase impermeveis a sinais cruzados.
Essa regra faz sentido porque os controladores que atuam na frequncia de 75 MHz so baseados em dois
cristais de mesma frequncia (um no TX e outro no RX) para evitar interferncia. Se outro transmissor na mesma
vizinhana (possivelmente um pobre perdedor) usar um cristal na mesma frequncia bem, isso vai custar a algum uma
batalha e um rob caro. Talvez foi assim que a primeira batalha de robs comeou?
Traduzido por Pedro Corra. Revisado por Suelen Virote
Outros mtodos de controles sem fio so, s vezes, permitidos, seguindo um guia mais geral. Isso significa que
voc pode usar um link Serial Xbee 2.4 GHz para controlar o rob usando um laptop, um controle feito em casa ou um
joystick. Se voc tentar us-lo, voc dever ser bem inspecionado por oficiais por segurana, para ter certeza de que seu
painel de controle tem todos os sensores a prova de falha como manda as regras de batalha. Eu acho isso importante
para deixar o evento interessante.
FLY SKY CT-6: A ALTERNATIVA QUE CUSTA US$32, 5-CH*,
2,4GHZ
Quando eles apareceram no Mercado, pares transmissor/receptor 2.4GHz eram bem caros, raramente
encontrados por menos de US$ 100. Mas em 2010, muitos sites vendem sistemas de sinal com 6 canais, atuando em
2,4GHz por aproximadamente US$ 35. Eu tenho usado o Fly Sky CT-6 do HobbyPartz.com em diversos projetos e eles
tem sido timos. (veja a figura 12-2).
A maioria dos transmissores R/C 2,4GHz pode ser pareado com diversos receptores R/C usando o processo de
ligao descrito no manual de instruo do transmissor. Se voc j possui um sistema desses (como os usados nos
captulos 8 e 10), voc talvez queira simplesmente comprar um receptor adicional de 2,4GHz e usar com o sei
transmissor existente. Isso lhe ajuda a economizar dinheiro se voc planejar construir diversos modelos de robores
controlados a distancia e simplesmente comprar receptores adicionais (HobbyPartz.com pea numero 79P-R6B-
Receiver) por menos de US$ 10 cada!
Figura 12.2. Sistema Fly-sky 2.4GHz R/C
Receptores de avio comuns normalmente possuem funes a prova de falha para perda de sinal, o qual
continua mandando as informaes anteriores a perda para cada canal. Mesmo isso sendo bom para aeromodelismo,
ruim para robs. O FlySky CT-6 programado para ser usado para avies, helicpteros, ou no nosso caso, robs. O CT-
6 acompanha um software para programao que permite mudar a configurao para cada canal.
Aps a perda de sinal, o receptor desse sistema capaz de enviar um baixo sinal sem nenhum pulso prvio, ou
outro sinal a prova de falha. Isso til quando voc l o sinal R/C com o Arduino, porque fcil de determinar quando o
sinal se perde. O FlySky CT-6 (entre outras marcas usando o mesmo software) tem reversor programvel, misturados de
canais para helicpteros outras caractersticas de programao todas acessveis pelo software chamado T6_config
(figura 12-3), que pode ser baixado em http://www.mycoolheli.com/t6config.html.
O transmissor tem 4 canais contendo 2 joysticks de dois eixos cada e outro canal utilizvel para robs como um
boto on/off ou um potencimetro analgico. Eu opero esse sistema com os joysticks cima-baixo para o controle do
motor, direita-esquerda para a arma; tornando possvel que apenas uma pessoa controle o rob e a arma ao mesmo
tempo. Voc tambm pode misturar as direes com um joystick e controlar a arma com outro (ou com eixos) isso
depende da forma que voc ache mais natural (eu prefiro controle independente para cada roda).
Traduzido por Pedro Corra. Revisado por Suelen Virote
Figura 12-3. O T6_config tool usado para reprogramar o transmissor Fly-sky R/C.
A minha configurao do T6 est disponvel para download, o que lhes permite parear o rob usando todos os 4
canais de comando sem mistura e usar um potencimetro como o quinto canal. Simplesmente coloque o arquivo no
programa e envie os dados para o transmissor por um cabo USB que dever ter acompanhado o seu sistema R/C. O
nico fator que dificulta que no h um interruptor para reverter o servo no transmissor. Voc deve usar o T6 config tool
para reverter a direo do servo que no foi um problema pra mim nesse projeto porque eu estava perto do computador
para a maior parte da construo.
Baixe o meu arquivo de configurao em https://sites.google.com/site/arduinorobotics/home/chapter12_files.
Essa configurao ativa canais de 1 a 4 para um controle comum/proporcional sem mistura de canais. O canal 5
uma combinao de SWB, no qual um interruptor on/off, e VR(A), no qual um potencimetro VR(A) para variao de
sinal. Se voc quiser usar um sinal on/off digital (como nesse captulo), coloque toda o campo VR(A) todo para a
esquerda e ento voc ter uma sada on/off. Voc pode se divertir com as configuraes do T6 config tool porque voc
pode sempre baixar meu arquivo e restaurar as configuraes. Eu brinquei bastante para chegar a essa configurao, e
s consegui um uso estvel com ou o canal 5, ou o canal 6 - mas no ambos ao mesmo tempo. O que significa que eu
consegui fazer com que o sistema seja de 5 canais, um a mais que eu normalmente fao.
ATENO HACKERS
O sexto canal nesse sistema s est disponvel para uso com a mistura de canais para um helicptero em 3D ou
um avio. No entanto, 2 interruptores e dois potencimetros podem ser usados, e um micro controlador USB programvel
ira informar a cada canal o que deve fazer (porque voc pode reprogramar o transmissor com um cabo USB). Espero que
algum consiga fazer um melhor uso do sistema e possa programar para uso esse sexto canal para o rob. Algum?
Nota: Como dito, o T6_config s roda em Windows. Como sou um usurio de Ubuntu, tive que pegar
meu laptop velho, empoeirado, que tinha Windows instalado para reprogramar o transmissor.
J com o CT-6 programado, vamos seguir para os eletrnicos
Os Eletrnicos
A maioria dos robs de competio utilizam mltiplos controladores de velocidade (ESC) como interface para o
sistema R/C dos motores e das armas. Esses controladores so simples de se usar mas o que pode ser feito limitado.
A nica raso de eu incluir rob de batalha como um projeto desse livro porque existem diversas coisas que pode ser
feitas com um Arduino que voc no pode fazer com um ESC convencional ou outro micro controlador programvel.
Seno voc poderia simplesmente enviar o sinal para o Arduino para adicionar um sistema de segurana em caso de
perda de sinal. Isso permite voc trabalha com uma variedade de sinais de entrada, enquanto continua produzindo o tipo
de resposta de segurana requerida pelo evento.
Ao alimentar sistema R/C pelo Arduino, voc pode utilizar um comando de segurana para armas remotamente,
um sistema interno de desligamento a prova de falhas para queda de sinal, um LED de fora para acompanhar as
condies do rob durante a batalha e adicionar telemetria usando o Xbee, ou ento controlar o seu rob usando um link
E
s
s
e
l
i
v
r
o
f
o
i
c
o
m
p
r
a
d
o
r
p
o
r
i
l
e
a
o
@
p
u
v
r
.
u
f
f
.
b
r
Traduzido por Pedro Corra. Revisado por Suelen Virote
Serial sem fio (Xbee) ao invs do R/C. Usando um Arduino, voc pode controlar cada aspecto do seu rob usando uma
central de micro controlador que voc pode modificar da forma que quiser. Sem ter que separar ESC para ler cada sinal
de entrada do R/C.
O Arduino
Novamente eu usei um Arduino no convencional (para ligaes de confiana), similar ao que j foi usado nos
captulos 8 e 10. Essa placa possui LEDs para D12 e D13 para agir como ambos indicadores neutros para os canais de
direo, quanto para receber os sinais indicadores quando no se utiliza um R/C (Esses LEDs piscam sem parar at que
o sinal se reestabelea).
Tambm instalei um regulador de voltagem de 5V 1.5A, conectores servo de 3 pinos para cada controle
analgico, e terminais de parafusos usados pata a conexo segura de cada pino I/O Lembre-se, esse cera usado em
uma batalha! O Arduino usado nesse projeto pode ser programado usando um cabo de programao FTDI padro do site
SparkFun.com, assim como o Arduino mostrado nesse livro. Veja a Figura 12-4 que mostra uma placa Eagle PC do
Arduino desse projeto.
Figura 12-4. O layout do Arduino Battle-duino Eagle
Voce pode baixar o arquivo de design para construer o seu prprio Arduino e controlador de motor OSMC no site
https://sites.google.com/site/arduinorobotics/home/chapter12_files.
Para construir o seu Battle-duino, baize os arquivos e imprima usando as instrues de impresso do captulo 6.
Se voc j sabe como desenhar um circuito PCB, voc sabe fazer isso.
Os Controladores de Motor
Os cinco diferentes motores desse projeto precisam de controles bidirecionais, Quatro deles so motores de
direo, e cada um precisa de controles direcionais (direita esquerda) para cada um apenas de um sinal. O quinto
motor controla a arma da sua escolha: Uma cerra, uma rampa que levante, um martelo reversvel, ou qualquer outra
coisas que voc queira. O resultado ser essas trs entradas (esquerda direita, arma) e as cindo sadas (quatro
motores de direo e um motor para a arma).
Voce pode escolher entre diversos controladores de motor, mas eu prefiro aqueles que eu posso pagar e os que
funcionam. O que eu posso pagar normalmente limita as minhas opes a um dos mais baratos, entre os disponveis.
Como voc j deve ter pecebido, eu estou inclinado a usar dois controladores de motor especficos do que os meus
prprios: o OSMC H-Bridge e o Dimension Engineering Sabertooth.
Eu quase sempre recomendo usar o Sabertooth 2x25 para a maioria dos projetos. Eles so baratos, fceis de
suar e possum limite de ultra corrente que o evita queimar. O Sabertooth indicado para aqueles que no querem
conttruir seus prprios controladores mas tambm no querem se preocupar . Numa batalha, no h tempo para
preocupao, ento deve-se confiar no controlador escolhido.
Traduzido por Pedro Corra. Revisado por Suelen Virote
To prepare each Sabertooth to work for this project, set onboard DIP switches 2 and 5 to the on
position, while leaving the remaining switches turned off. This enables the Sabertooth controllers to
operate using lithium batteries (with low voltage cutoff), R/C pulse signal inputs, no timeout for use with
a microcontroller (the Arduino), and independent mode (tank) steering. Or you can use the DIP Switch
Wizard on the Sabertooth 2x25 product page to determine a different configuration:
http://www.dimensionengineering.com/datasheets/Sabertoothdipwizard/start.htm.
CHAPTER 12 THE BATTLE-BOT
525
The Open Source Motor controller has no internal current-limiting, but it offers extreme power for
those times when you just need to push your bot to the limit. And because the OSMC is an open-source
project, you can use the same tested schematic used for the original to design your own OSMC specific
to your projects needs. The OSMC design used in this book is also suitable to use for the drive motors;
although, you would need four more of them (one for each motor).
I currently use a set of two Sabertooth 2x25 motor controllers for the drive motors and a home-made
OSMC motor controller for the weapon. If you plan on building a monster Battle-bot that weighs several
hundred pounds, you might consider upgrading to the Sabertooth 2x50HV (dual 50-amp controller).
In Figure 12-5, you can see my single-sided PCB, through-hole component version of the OSMC
motor controller, easily capable of powering a drive motor or weapon. Remember that the OSMC is
nothing more than a highly efficient H-bridge, so you must have one for each motor and a
microcontroller like the Arduino to send the drive signals to control it.
Figure 12-5. These three pictures show the various stages of the mini-OSMC board used for the weapon:
the Eagle board file (left), the etched and drilled board (center), and the finished mini-OSMC board (right).
To build the mini-OSMC for your weapon motor, download the Eagle files from
https://sites.google.com/site/arduinorobotics/home/chapter12_files.
With the Arduino and motor controllers selected and built, you need to build the frame.
The Frame
The frame is the backbone of any robot and should be extremely sturdy while attempting to remain as
lightweight as possible (depending on your intended weight class). I made an 18-inch square frame
using the 2-inch wide angle iron. I then mounted the motors to the inside of these pieces and the wheel
axles to the outer corners. By adding four more braces across the front, back, and middle of the bot, it is
strong enough to hold me jumping on top of it (155lbs) without flexing, which is a good start (see Figure
12-6).
CHAPTER 12 THE BATTLE-BOT
526
Figure 12-6. The basic frame with motors, wheels, and batteries test-fitted
I cannot as of yet, inexpensively create my own aluminum parts for each robot, so I chose to build
my frame from materials that are easy to obtain at the local hardware store: angle iron, nuts and bolts, a
drill and drill bits, and a saw.
Even if you plan to go in a different direction with your Battle-bot for weapons or attack methods,
this frame is a solid base for you to start on. The frame without the wheels attached is slim, at only 3-inch
thick. After you install the wheels to the frame, the height is increased to the diameter of the wheels used
(in this case, 9 inches).
For a fully concealed design, you might use smaller solid-core wheels (3-inch to 5-inch diameter)
and place the wheels and drive motors completely inside of the frame; although you might need to
increase the frame dimensions to accommodate. Many of the popular Battle-bots used this design, as it
leaves little in harm's way.
To Buy or Build?
If you are interested in building a Battle-bot but are not excited about building your own frame,
RobotMarketplace.com sells Battle-kits made using machined aluminum pieces, a multilink chain drive
system that utilizes two motors for complete four-wheel drive with speed reduction, and space for a
speed controller and batteries (see Figure 12-7). The base for this type of bot comes with no motor,
motor controllers, or batteries, for a mere $699. Although these kits are well made, they might be
relatively expensive for someone just getting into the sport, so you can attempt to make your own frame.
CHAPTER 12 THE BATTLE-BOT
527
Figure 12-7. A prebuilt Battle-kit from RobotMarketplace.com
If you can afford the price tag, more power to you. If I ever have that much money laying around, I
would love to have one of these frames! If not, you can follow my guide to building your own. I know that
my design is basic, but it can get you moving in the right direction.
Modifying the Wheels
I found some surplus electric scooter wheels that included the wheel, tire, bearings, and 65-tooth
sprocket all for under $16 each including shipping. There is one caveat with this wheel assembly that I
did not realize until I received them; they have a free-wheeling hub assembly that enables them to spin
freely in one direction. Although that is great for a nonreversing scooter, it is not ideal for a bidirectional
Battle-bot. How can you get around this? I had to weld a few spots on each free-wheel mechanism so
that it would not freely spin in reverse (see Figure 12-16). This was annoying but well worth the money I
Traduzido por Pedro Corra. Revisado por Suelen Virote
saved versus buying the proper wheel and sprockets separately.
CHAPTER 12 THE BATTLE-BOT
528
The proper wheel and sprocket pair is pictured in Figure 12-8, with a flat-topped tire for more
traction and a direct bolt-on sprocket with no free-wheeling mechanism. You can also select how many
teeth you want for specific gearing of your bot when buying the sprocket separately. If you are willing to
pay the extra money, it can make your installation much easier and more reliable.
Figure 12-8. A wheel-and-sprocket pair, perfect for the Battle-bot
With the wheels modified and ready to mount, we must now start making the pieces needed for the
main frame.
Building the Frame
To build the frame, you need the metal pieces, nuts and bolts, motors, wheel-assemblies, sprockets,
chain, a Dremel tool, and a drill with drill-bits. It also helps to have an angle grinder and a reciprocating
saw with a metal blade to quickly cut the metal pieces and smooth any sharp edges. This frame can be
easy to measure, in that every metal piece (except the axles) should be exactly 18 inches.
The following five steps guide you through the frame building process:
Cut four main frame pieces. Start by cutting the 2-inch angle iron (6 foot)
segment into four equal 18-inch pieces. Two of these pieces will be drilled and
cut (in step 2) with a Dremel tool to accommodate the wheel axles, motormounting,
and tension adjustments. The other two pieces simply bolt to the
front and rear of the frame, providing added support and a place to adjust the
tension of each chain.
Cut axle mounting grooves. Now you can cut the axle grooves at each end of
the left and right frame pieces. They should be the width of the axle itself
(5/16-inch), and the length should span about 2 inches to allow for adequate
adjustment room. Start by measuring 1/2 inch away from the end of the angle
iron from either side, and drill a 5/16-inch hole centered between the top and
CHAPTER 12 THE BATTLE-BOT
529
bottom of the 2-inch angle iron. (One inch from either the top or bottom is
centered.) With the first pilot hole drilled, you can measure approximately 2
inch from the first pilot hole and drill another centered pilot hole. You can now
cut out the space between the tops and bottoms of the two pilot holes with a
Dremel to reveal the needed axle-groove to adjust the chain tension. This
procedure is similar to what you did on the Lawn-bot in Chapter 10 to allow
the motor-mounts to slide forward or backward.Figure 12-9 provides a better
idea of how to cut the axle grooves and motor-mounting holes.
Figure 12-9. The motor-mounting holes and axle grooves are cut into the left frame piece.
In Figures 12-9 and 12-10, you can see the needed placement of each mounting hole and axle
groove. When cut, the two side pieces should look similar to Figure 12-10; they should also be
interchangeable, so you don't have to worry about labeling them. The motor output-shaft hole should be
approximately 5 inches from each end of the 2-inch angle iron. The motor-mounting holes should be
measured (from your motors) and marked after fitting the output-shaft hole. (The mounting holes on my
motor are spaced 1 3/8inch apart.)
Figure 12-10. The two finished left and right side frame pieces
Cut frame braces. Now cut the two 3/4-inch wide angle-iron center frame
supports (also 18-inch)if you bought a 36-inch section for this piece, simply
cut it in half. You should then drill two holes, one on each end of both pieces,
CHAPTER 12 THE BATTLE-BOT
530
about 1/2 inch from each end. The hole should be the size of the bolts you use
to mount each piece I used 3/8-inch diameter bolts, nuts, and washers to
assemble my frame. At this point, you should have six metal pieces all 18
inches; two of them are 3/4-inch angle-iron and the other four are 2-inch
angle-iron. Each piece of angle iron used in the frame should have a hole
drilled on each end to secure it to the adjacent piece with a bolt/nut. Your side
frame rails should also have the appropriate holes drilled for the motors and
axle grooves (see Figure 12-11).
Figure 12-11. The side and center pieces of the sub frame with motors, ready for assembly
Assemble the pieces together. I first mounted the motors using the two lower
bolts to secure each motor to the frame and then lined up the two center frame
supports as close to the inside of each motor as would fit. I then marked each
hole location with a permanent marker and drilled the mounting holes
through the base of the side rails and ends of the center supports. After drilling
the mounting holes, you can install the center supports using two bolts on
each support (one on each end), as shown in Figure 12-12:
CHAPTER 12 THE BATTLE-BOT
531
Figure 12-12. The assembled subframe
Traduzido por Pedro Corra. Revisado por Suelen Virote
With the center supports bolted to the side frame rails, you can now mount the
front and rear frame rails, using two more bolts on each piece. If you haven't
already, drill a hole on each end of the front and rear frame rails, line them up
on top of the left and right frame rails, and drill the remaining holes to bolt the
front and rear frame pieces to the left and right frame pieces, completing the
square shape (see Figure 12-13).
CHAPTER 12 THE BATTLE-BOT
532
Figure 12-13. A diagram of the pieces used to build the frame
After you have all six frame pieces bolted together and the motors mounted, the main frame
assembly should be completed. You are now ready to add the drive train and get this bot moving.
The Drive Train
The drive train for this bot has a different purpose than the previous bots in this book, focusing on
reliability during battle. This bot will have four wheels, each wheel being driven by its own motor and
H-bridge, such that if one wheel is disabled by the opponent, the bot can still move independently of the
disabled wheel. As you can imagine, this means that you need 4x of each of the following:
Four DC motors
Four H-bridges
Four sprockets
Four wheels
Four chains
As an inexpensive option, I decided to go with four ungeared electric scooter motors available from
Allelectronics.com for $15 each. The motors are Currie Technologies 135watt 24VDC, 10 Amps with a
rated speed of 3000RPM. These electric motors are about the size of a soda can with an 8mm diameter
output shaft, flattened on one side. They are usually purchased with a 3mm COG pulley sprocket
mounted to the output shaft, intended for use with a COG drive belt commonly found on such scooters.
Because of the nature of this bot, I opted to use steel instead of rubber for the drive components.
(Use whatever you want.) The COG pulleys can be removed from the motor output shafts, allowing you
to replace them with chain-type sprockets.
CHAPTER 12 THE BATTLE-BOT
533
You might also like
- Controle de Qualidade 2015 Aula 3a Coleta de Dados 7 FerramentasDocument13 pagesControle de Qualidade 2015 Aula 3a Coleta de Dados 7 FerramentasMariana PellegriniNo ratings yet
- Uff Controle de Qualidade 2014 Aula 10 5sDocument21 pagesUff Controle de Qualidade 2014 Aula 10 5sMariana PellegriniNo ratings yet
- Curso de Vibrações e Balanceamento de RotoresDocument125 pagesCurso de Vibrações e Balanceamento de RotoresdteijeiraNo ratings yet
- UFF CONTROLE DE QUALIDADE 2015 Aula 3b Folha de VerificaçãoEstratificação PDFDocument27 pagesUFF CONTROLE DE QUALIDADE 2015 Aula 3b Folha de VerificaçãoEstratificação PDFMariana PellegriniNo ratings yet
- Uff Controle de Qualidade 2014 Aula 10 5sDocument21 pagesUff Controle de Qualidade 2014 Aula 10 5sMariana PellegriniNo ratings yet
- Resumo Do ExameDocument1 pageResumo Do ExameMariana PellegriniNo ratings yet
- Uff Controle de Qualidade 2014 Aula 10 5sDocument21 pagesUff Controle de Qualidade 2014 Aula 10 5sMariana PellegriniNo ratings yet
- Apresent Convolução Correlação CruzadaDocument35 pagesApresent Convolução Correlação CruzadaPedro Henrique Oliveira SilvaNo ratings yet
- Manual em PT - Inversor de Frequência1336 Plus IIDocument212 pagesManual em PT - Inversor de Frequência1336 Plus IIEberteMagalhesNo ratings yet
- Reposta 2 Aula 5Document2 pagesReposta 2 Aula 5Rhendel RodriguesNo ratings yet
- Curso VBA Excel - Básico PDFDocument28 pagesCurso VBA Excel - Básico PDFitalo_junjiNo ratings yet
- Construção de cisterna de 4500LDocument4 pagesConstrução de cisterna de 4500LJonathan PistoriusNo ratings yet
- Relatório Ensaios Mecânicos em PapelDocument9 pagesRelatório Ensaios Mecânicos em PapelSol de OliveiraNo ratings yet
- Exercicios Grupo 1 - Algoritimia - UFCD 0809 - Programação em CIC++ - FundamentosDocument5 pagesExercicios Grupo 1 - Algoritimia - UFCD 0809 - Programação em CIC++ - FundamentosAndreia DiasNo ratings yet
- Lista de Exercícios - ConcretoDocument4 pagesLista de Exercícios - ConcretoRenata Rissi100% (1)
- Potência e Rendimento emDocument1 pagePotência e Rendimento emTha VilegasNo ratings yet
- Estatística Básica: População, Amostra, Variáveis e TiposDocument20 pagesEstatística Básica: População, Amostra, Variáveis e TiposjeanfmcNo ratings yet
- Atualização da legenda do mapa de solos do ESDocument34 pagesAtualização da legenda do mapa de solos do ESAndre VaccariNo ratings yet
- Termo de Abertura de ProjetoDocument9 pagesTermo de Abertura de ProjetoPricila YessayanNo ratings yet
- OTDRDocument23 pagesOTDRSandro Luiz SchoeffelNo ratings yet
- Cadernos 9Document303 pagesCadernos 9Luiza ValladaresNo ratings yet
- Exemplo Modelo Homologação Spark - DroneDocument1 pageExemplo Modelo Homologação Spark - DronemarcosperesNo ratings yet
- Assistente AdministrativoDocument69 pagesAssistente AdministrativoAndré Roberto Da Silva MachadoNo ratings yet
- Planejamento Estrategico Célia Regina SimonettiDocument16 pagesPlanejamento Estrategico Célia Regina SimonettiemersontigreNo ratings yet
- Catálogo Ferramentas Black+DeckerDocument52 pagesCatálogo Ferramentas Black+DeckerpelegobarNo ratings yet
- Fis Giars Guia Informacao Apuracao Icms RsDocument11 pagesFis Giars Guia Informacao Apuracao Icms RsHitler Antonio de AlmeidaNo ratings yet
- Bomba Centrífuga - Equipe - Série BRFDocument15 pagesBomba Centrífuga - Equipe - Série BRFLucas Zarpelon SilvaNo ratings yet
- Apanhado de Dicas Sobre Fotografia - 154pgsDocument154 pagesApanhado de Dicas Sobre Fotografia - 154pgsCris DutraNo ratings yet
- Gruas torre: segurança e prevenção de riscosDocument5 pagesGruas torre: segurança e prevenção de riscosTatiana Rilo100% (3)
- Manual Cidadania Global DigitalDocument116 pagesManual Cidadania Global Digitalnandsantos100% (2)
- Direito Aplicado À InformáticaDocument53 pagesDireito Aplicado À InformáticaGustavo Rossi100% (1)
- Política de BackupDocument9 pagesPolítica de BackupFlávioNo ratings yet
- Antropologia: ciências naturais x sociaisDocument2 pagesAntropologia: ciências naturais x sociaisIsrael Alves Jahn100% (1)
- Apostila Curso PLC Siemens Software Step7Document343 pagesApostila Curso PLC Siemens Software Step7Erlon Carvalho100% (4)
- Controlo de rendimentos e mão de obra em construçãoDocument102 pagesControlo de rendimentos e mão de obra em construçãoCarlos MagalhãesNo ratings yet
- Bombas PDFDocument47 pagesBombas PDFalfredobochnia4337100% (1)
- 08 Harpa Cristã - Cristo, o Fiel Amigo - Arranjo: Renato PimentaDocument32 pages08 Harpa Cristã - Cristo, o Fiel Amigo - Arranjo: Renato PimentaRenato Pimenta100% (1)