You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Project Scheduling and TrackingDocument47 pagesProject Scheduling and TrackingArun VinodhNo ratings yet
- Sindi and Wahab in 18th CenturyDocument9 pagesSindi and Wahab in 18th CenturyMujahid Asaadullah AbdullahNo ratings yet
- DQ Vibro SifterDocument13 pagesDQ Vibro SifterDhaval Chapla67% (3)
- Plaza 66 Tower 2 Structural Design ChallengesDocument13 pagesPlaza 66 Tower 2 Structural Design ChallengessrvshNo ratings yet
- Project - New Restuarant Management System The Grill HouseDocument24 pagesProject - New Restuarant Management System The Grill HouseMayank Mahajan100% (3)
- Fault Current Means The Electrical Currentthat Flows Through A Circuit During AnDocument4 pagesFault Current Means The Electrical Currentthat Flows Through A Circuit During Ansandeep_chauhan3770No ratings yet
- MM in Width, There Shall Be A Passage Way FromDocument4 pagesMM in Width, There Shall Be A Passage Way Fromsandeep_chauhan3770No ratings yet
- Realistic Faults Olted Fault: Edit EditDocument4 pagesRealistic Faults Olted Fault: Edit Editsandeep_chauhan3770No ratings yet
- Realistic Faults Olted Fault: Edit EditDocument3 pagesRealistic Faults Olted Fault: Edit Editsandeep_chauhan3770No ratings yet
- Realistic Faults: MM in Width, There Shall Be A Passage Way FromDocument3 pagesRealistic Faults: MM in Width, There Shall Be A Passage Way Fromsandeep_chauhan3770No ratings yet
- MM in Width, There Shall Be A Passage Way FromDocument4 pagesMM in Width, There Shall Be A Passage Way Fromsandeep_chauhan3770No ratings yet
- Arcing Fault: Electric ArcDocument3 pagesArcing Fault: Electric Arcsandeep_chauhan3770No ratings yet
- Fault CurrentDocument3 pagesFault Currentsandeep_chauhan3770No ratings yet
- Per-Unit Superposition: Fault Current Means The Electrical Currentthat Flows Through A Circuit During AnDocument3 pagesPer-Unit Superposition: Fault Current Means The Electrical Currentthat Flows Through A Circuit During Ansandeep_chauhan3770No ratings yet
- Realistic Faults: Fault Current Means The Electrical Currentthat Flows Through A Circuit During AnDocument3 pagesRealistic Faults: Fault Current Means The Electrical Currentthat Flows Through A Circuit During Ansandeep_chauhan3770No ratings yet
- Fault CurrentDocument3 pagesFault Currentsandeep_chauhan3770No ratings yet
- Realistic Faults Olted Fault: TransientDocument3 pagesRealistic Faults Olted Fault: Transientsandeep_chauhan3770No ratings yet
- Arcing Fault: Positive-Sequence Component, in Which The Phases Are in The Same Order As The OriginalDocument3 pagesArcing Fault: Positive-Sequence Component, in Which The Phases Are in The Same Order As The Originalsandeep_chauhan3770No ratings yet
- Arcing Fault: Electric ArcDocument3 pagesArcing Fault: Electric Arcsandeep_chauhan3770No ratings yet
- Arcing Fault: Electric ArcDocument3 pagesArcing Fault: Electric Arcsandeep_chauhan3770No ratings yet
- Realistic Faults: Prospective Short-Circuit CurrentDocument3 pagesRealistic Faults: Prospective Short-Circuit Currentsandeep_chauhan3770No ratings yet
- Voltages Currents Symmetrical Components: Subtransient Is First, and Is Associated With The Largest CurrentsDocument3 pagesVoltages Currents Symmetrical Components: Subtransient Is First, and Is Associated With The Largest Currentssandeep_chauhan3770No ratings yet
- Arcing Fault: Three-Phase Prospective Short Circuit Current Circuit BreakersDocument3 pagesArcing Fault: Three-Phase Prospective Short Circuit Current Circuit Breakerssandeep_chauhan3770No ratings yet
- Transient Recovery VoltageDocument1 pageTransient Recovery Voltagesandeep_chauhan3770No ratings yet
- Electricalfault Condition. A Fault Condition Occurs When One or More Electrical Conductors Contact Ground And/or Each OtherDocument1 pageElectricalfault Condition. A Fault Condition Occurs When One or More Electrical Conductors Contact Ground And/or Each Othersandeep_chauhan3770No ratings yet
- 5c3f1a8b262ec7a Ek PDFDocument5 pages5c3f1a8b262ec7a Ek PDFIsmet HizyoluNo ratings yet
- CX Programmer Operation ManualDocument536 pagesCX Programmer Operation ManualVefik KaraegeNo ratings yet
- Test Your Knowledge - Study Session 1Document4 pagesTest Your Knowledge - Study Session 1My KhanhNo ratings yet
- Quantitative Methods For Economics and Business Lecture N. 5Document20 pagesQuantitative Methods For Economics and Business Lecture N. 5ghassen msakenNo ratings yet
- Prelim Examination MaternalDocument23 pagesPrelim Examination MaternalAaron ConstantinoNo ratings yet
- Lithuania DalinaDocument16 pagesLithuania DalinaStunt BackNo ratings yet
- Outdoor Air Pollution: Sources, Health Effects and SolutionsDocument20 pagesOutdoor Air Pollution: Sources, Health Effects and SolutionsCamelia RadulescuNo ratings yet
- Classifications of AssessmentsDocument11 pagesClassifications of AssessmentsClaire CatapangNo ratings yet
- Huawei R4815N1 DatasheetDocument2 pagesHuawei R4815N1 DatasheetBysNo ratings yet
- Organizational ConflictDocument22 pagesOrganizational ConflictTannya AlexandraNo ratings yet
- Dtu Placement BrouchureDocument25 pagesDtu Placement BrouchureAbhishek KumarNo ratings yet
- E0 UoE Unit 7Document16 pagesE0 UoE Unit 7Patrick GutierrezNo ratings yet
- Dalasa Jibat MijenaDocument24 pagesDalasa Jibat MijenaBelex ManNo ratings yet
- B. Geoinformatics PDFDocument77 pagesB. Geoinformatics PDFmchakra720% (1)
- Quick Help For EDI SEZ IntegrationDocument2 pagesQuick Help For EDI SEZ IntegrationsrinivasNo ratings yet
- E MudhraDownload HardDocument17 pagesE MudhraDownload HardVivek RajanNo ratings yet
- Hdfs Default XML ParametersDocument14 pagesHdfs Default XML ParametersVinod BihalNo ratings yet
- Chapter 2 ProblemsDocument6 pagesChapter 2 ProblemsYour MaterialsNo ratings yet
- ReadmeDocument3 pagesReadmedhgdhdjhsNo ratings yet
- Gemini Dollar WhitepaperDocument7 pagesGemini Dollar WhitepaperdazeeeNo ratings yet
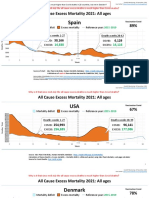
- Countries EXCESS DEATHS All Ages - 15nov2021Document21 pagesCountries EXCESS DEATHS All Ages - 15nov2021robaksNo ratings yet
- Principals' Leadership Styles and Student Academic Performance in Secondary Schools in Ekiti State, NigeriaDocument12 pagesPrincipals' Leadership Styles and Student Academic Performance in Secondary Schools in Ekiti State, NigeriaiqraNo ratings yet
- Iec TR 61010-3-020-1999Document76 pagesIec TR 61010-3-020-1999Vasko MandilNo ratings yet
- Acute Coronary SyndromeDocument30 pagesAcute Coronary SyndromeEndar EszterNo ratings yet
- Pavement Design1Document57 pagesPavement Design1Mobin AhmadNo ratings yet