You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Flying ColorsDocument100 pagesFlying ColorsAgnieszkaAgayo20% (5)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Introduction To M365 PresentationDocument50 pagesIntroduction To M365 Presentationlasidoh0% (1)
- Activity Evaluation Form: "Where Children Come First"Document1 pageActivity Evaluation Form: "Where Children Come First"TuTitNo ratings yet
- LKG Math Question Paper: 1. Count and Write The Number in The BoxDocument6 pagesLKG Math Question Paper: 1. Count and Write The Number in The BoxKunal Naidu60% (5)
- Sending Messages - 26905649Document2 pagesSending Messages - 26905649shruthi01No ratings yet
- Agriculture and Industries (For MD) - 26786004Document5 pagesAgriculture and Industries (For MD) - 26786004shruthi01No ratings yet
- Our Minerals Wealth - 26673999Document4 pagesOur Minerals Wealth - 26673999shruthi01No ratings yet
- 16588/BKN YPR EXP Third Ac (3A) : WL WLDocument2 pages16588/BKN YPR EXP Third Ac (3A) : WL WLshruthi01No ratings yet
- People Who Made A Difference - 26944089Document4 pagesPeople Who Made A Difference - 26944089shruthi01No ratings yet
- Means of Transport - 26905650Document3 pagesMeans of Transport - 26905650shruthi01No ratings yet
- L.no. - 2 Reproduction in Animals - 26611022Document4 pagesL.no. - 2 Reproduction in Animals - 26611022shruthi01No ratings yet
- Autoconer 338 - Winding Technology.: Multi-Optionality, Know-How, InternationalityDocument8 pagesAutoconer 338 - Winding Technology.: Multi-Optionality, Know-How, InternationalityAnonymous 5XZ3VZNo ratings yet
- Slay MechanismDocument13 pagesSlay Mechanismshruthi01100% (1)
- Motion EconomyDocument4 pagesMotion Economyshruthi01No ratings yet
- 2014-5-43 - P Mathematical Model of Plain Weave Fabric at Various Stages of Formation PDocument6 pages2014-5-43 - P Mathematical Model of Plain Weave Fabric at Various Stages of Formation Pshruthi01No ratings yet
- The Concept of WasteDocument4 pagesThe Concept of Wasteshruthi01No ratings yet
- Types of ErgonomicsDocument1 pageTypes of Ergonomicsshruthi01100% (3)
- 04 Cost LeadershipDocument19 pages04 Cost Leadershipshruthi01No ratings yet
- Lego Maps ArtDocument160 pagesLego Maps ArtВячеслав КозаченкоNo ratings yet
- Report On Marketing Strategy of Nestle MILKPAKDocument13 pagesReport On Marketing Strategy of Nestle MILKPAKAzeem Ahmad100% (1)
- Acampamento 2010Document47 pagesAcampamento 2010Salete MendezNo ratings yet
- Five Kingdom ClassificationDocument6 pagesFive Kingdom ClassificationRonnith NandyNo ratings yet
- Suspend and Resume Calls: Exit PlugDocument4 pagesSuspend and Resume Calls: Exit PlugrajuNo ratings yet
- Historical Exchange Rates - OANDA AUD-MYRDocument1 pageHistorical Exchange Rates - OANDA AUD-MYRML MLNo ratings yet
- Addition Color by Code: Yellow 1, 2, Blue 3, 4, Pink 5, 6 Peach 7, 8 Light Green 9, 10, Black 11Document1 pageAddition Color by Code: Yellow 1, 2, Blue 3, 4, Pink 5, 6 Peach 7, 8 Light Green 9, 10, Black 11Noor NadhirahNo ratings yet
- Revit 2023 Architecture FudamentalDocument52 pagesRevit 2023 Architecture FudamentalTrung Kiên TrầnNo ratings yet
- Aquaculture - Set BDocument13 pagesAquaculture - Set BJenny VillamorNo ratings yet
- Will Smith BiographyDocument11 pagesWill Smith Biographyjhonatan100% (1)
- Assignment 3Document2 pagesAssignment 3Debopam RayNo ratings yet
- List of The Legend of Korra Episodes - Wikipedia PDFDocument27 pagesList of The Legend of Korra Episodes - Wikipedia PDFEmmanuel NocheNo ratings yet
- Distribution BoardDocument7 pagesDistribution BoardmuralichandrasekarNo ratings yet
- Resume NetezaDocument5 pagesResume Netezahi4149No ratings yet
- Minuets of The Second SCTVE MeetingDocument11 pagesMinuets of The Second SCTVE MeetingLokuliyanaNNo ratings yet
- Student Exploration: Digestive System: Food Inio Simple Nutrien/oDocument9 pagesStudent Exploration: Digestive System: Food Inio Simple Nutrien/oAshantiNo ratings yet
- Power Control 3G CDMADocument18 pagesPower Control 3G CDMAmanproxNo ratings yet
- IIM L: 111iiiiiiiDocument54 pagesIIM L: 111iiiiiiiJavier GonzalezNo ratings yet
- Centrifuge ThickeningDocument8 pagesCentrifuge ThickeningenviroashNo ratings yet
- PCI Bridge ManualDocument34 pagesPCI Bridge ManualEm MarNo ratings yet
- Unit 1 and 2Document4 pagesUnit 1 and 2Aim Rubia100% (1)
- LRAD Datasheet 2000XDocument2 pagesLRAD Datasheet 2000XOkkar MaungNo ratings yet
- Cad Data Exchange StandardsDocument16 pagesCad Data Exchange StandardskannanvikneshNo ratings yet
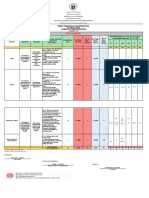
- Revised Final Quarter 1 Tos-Rbt-Sy-2022-2023 Tle-Cookery 10Document6 pagesRevised Final Quarter 1 Tos-Rbt-Sy-2022-2023 Tle-Cookery 10May Ann GuintoNo ratings yet
- III.A.1. University of Hawaii at Manoa Cancer Center Report and Business PlanDocument35 pagesIII.A.1. University of Hawaii at Manoa Cancer Center Report and Business Planurindo mars29No ratings yet
- Catálogo MK 2011/2013Document243 pagesCatálogo MK 2011/2013Grupo PriluxNo ratings yet