You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- SX004a-En-EU-Example - Pinned Column Using Non Slender H-Section or RHSDocument5 pagesSX004a-En-EU-Example - Pinned Column Using Non Slender H-Section or RHSKen OkoyeNo ratings yet
- MUNAR - Linear Regression - Ipynb - ColaboratoryDocument30 pagesMUNAR - Linear Regression - Ipynb - ColaboratoryTRISTAN JAYSON MUNARNo ratings yet
- Paper3 SrivastavaDocument9 pagesPaper3 SrivastavaMuhammad MiqdadNo ratings yet
- Full-Waveform Lidar AlgorithmsDocument14 pagesFull-Waveform Lidar AlgorithmsKuldip SahniNo ratings yet
- Paper3 SrivastavaDocument9 pagesPaper3 SrivastavaMuhammad MiqdadNo ratings yet
- GIS Application For Hilly WatershedDocument78 pagesGIS Application For Hilly WatershedKuldip SahniNo ratings yet
- Tree Height Determination Using LidarDocument12 pagesTree Height Determination Using LidarKuldip SahniNo ratings yet
- Finance CareerDocument2 pagesFinance CareerKuldip SahniNo ratings yet
- GUI ProgrammingDocument13 pagesGUI ProgrammingStella DearingNo ratings yet
- Celtic Fields From LIDAR Data KrigingDocument1 pageCeltic Fields From LIDAR Data KrigingKuldip SahniNo ratings yet
- Airborne LiDAR For DEMDocument49 pagesAirborne LiDAR For DEMKuldip SahniNo ratings yet
- FUSION ManualDocument179 pagesFUSION ManualKuldip SahniNo ratings yet
- KrigingDocument20 pagesKrigingDeepblue09No ratings yet
- VelestDocument31 pagesVelestTanaya WahengbamNo ratings yet
- Ieeetran HowtoDocument28 pagesIeeetran HowtoTeksen AksunNo ratings yet
- Example of Perspective TransformationDocument2 pagesExample of Perspective TransformationNitin Suyan PanchalNo ratings yet
- The "Big Bang" Is Just Religion Disguised As ScienceDocument6 pagesThe "Big Bang" Is Just Religion Disguised As ScienceSean BarryNo ratings yet
- Circumference Lesson PlanDocument3 pagesCircumference Lesson Planapi-395816684No ratings yet
- Solving Even-Parity Problems Using Traceless Genetic ProgrammingDocument7 pagesSolving Even-Parity Problems Using Traceless Genetic ProgrammingMihai OlteanNo ratings yet
- ProblemsDocument18 pagesProblemsBrahmanand SinghNo ratings yet
- Paul Martin Postal - Three Investigations of ExtractionDocument229 pagesPaul Martin Postal - Three Investigations of ExtractionpalingenesiaNo ratings yet
- Colegio de San Gabriel Arcangel of Caloocan, Inc. Escuela San Gabriel de Arcangel FoundationDocument8 pagesColegio de San Gabriel Arcangel of Caloocan, Inc. Escuela San Gabriel de Arcangel FoundationJasmine BalbinNo ratings yet
- Physics 119A Midterm Solutions 1 PDFDocument3 pagesPhysics 119A Midterm Solutions 1 PDFHenry JurneyNo ratings yet
- 1990 - 7 - Calendar ProblemsDocument5 pages1990 - 7 - Calendar ProblemsJim BoudroNo ratings yet
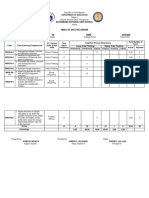
- Tos Math 8 3RD QuarterDocument2 pagesTos Math 8 3RD Quarterrmm041550% (2)
- SyllabusDocument3 pagesSyllabuspan tatNo ratings yet
- 2012-01-02 203611 Answers2Document9 pages2012-01-02 203611 Answers2medeepikaNo ratings yet
- Mathematics: Circle and Its PartsDocument30 pagesMathematics: Circle and Its PartsDom Martinez100% (2)
- Practical Implementation of A Dependently Typed Functional Programming LanguageDocument270 pagesPractical Implementation of A Dependently Typed Functional Programming LanguageEdwin Brady100% (1)
- Chapter One - 1.1. - Geometry NotesDocument8 pagesChapter One - 1.1. - Geometry NotesKayse HusseinNo ratings yet
- UntitledDocument8 pagesUntitledapi-233604231No ratings yet
- Kelm 3Document14 pagesKelm 3Aman ChaurasiaNo ratings yet
- Tut2 PDFDocument3 pagesTut2 PDFanshuljain226No ratings yet
- Adobe Scan May 23, 2022Document3 pagesAdobe Scan May 23, 2022Anagh ShuklaNo ratings yet
- FspecialDocument7 pagesFspecialAhmad BasNo ratings yet
- Das2003 PDFDocument23 pagesDas2003 PDFAtulkumar ManchalwarNo ratings yet
- Theta Geometry TestDocument6 pagesTheta Geometry TestJun Arro Estrella JoestarNo ratings yet
- RTSys Lecture Note - Ch04 Clock-Driven SchedulingDocument24 pagesRTSys Lecture Note - Ch04 Clock-Driven Schedulingسام السبئيNo ratings yet
- Course Dairy For V Semester PDFDocument84 pagesCourse Dairy For V Semester PDFPiyushm JainNo ratings yet
- Complex NumbersDocument87 pagesComplex NumbersPriya DudetteNo ratings yet